
Gesture Recognizing using Naïve Bayes Algorithm and a Leap
Motion
Daniel Sutopo Pamungkas and Sonny Hendratmo
Department of Electrical, Politeknik Negeri Batam, Jl Ahmad Yani, Batam, Indonesia
Keywords: Gesture Recognizes, Leap Motion, Game, Real-time.
Abstract: This article presents the methods to recognize poses of the hand. The Naïve Bayes algorithm is used to
identify four gestures. These gestures are applying in a customized game. The leap motion as a gesture
sensor is utilized in this study. Five subjects are performing the attempt after the training their gestures data.
Roll left, roll right, and palm face down are the gestures to be trained and tested in this study. The
experiment results show that this system enabled to read the poses of the user's hands. To demonstrate the
abilty of the proposed method, a customized game is created. Moreover, the users enable to play a game
with no difficulty.
1 INTRODUCTION
Human Machine Interface (HMI) is a part of the
machine to make it easy to use the equipment. To
control the equipment more convenient for the user,
the gestures of the human are used. Hand and fingers
are the popular human body part which used to
manage the machine using their poses.
Human gestures, especially human hand poses,
can be divided into two groups, static pose and
dynamic movement, respectively. A static pose is a
pose that is in idle condition and almost with a
constant shape. On the other hand, the active
activities are poses with the pattern motion
(Sonkusare, 2015). Comparing both gestures in the
computational term, the dynamic movements are
more complicated than the static ones (Huang,
2015). However, these dynamic gestures have many
applications for HMI.
Robotics (Andrean, 2019), health (Andreoni,
2007), and also playing a game are several examples
of HMI applications using dynamic gestures. To
interface the human gestures with the machine, there
are several instruments to be used, for instance,
using Electromyograph (EMG) or muscle signal
(Andrean, 2019), brain signal, or
Electroencephalography (EEG) (Andreoni, 2007),
and camera (Liu, 2019).
In this article a leap motion which is used for the
instrument to detect the movement of human poses.
Moreover, the Naïve Bayes algorithms are applied to
recognize the movement of the subjects. Also, a
costumed game is establishing to examine the effect
the proposed system.
To deliver a complete discussion, this paper is
organized as follows: the next section purposes of
providing information about the previous researches
to identify human hand gestures. Section III presents
the proposed system. Then proceed with next,
Section IV, which offers the tests on the proposed
method by examining the effectiveness of the
proposed system using a real game. In final part
provides the concluding remarks and the future work
of this investigation.
2 BACKGROUNDS
The hand poses identification has become the
research topic which be applied in the robotic hand
and prostatic hand. Some of the researchers are
studying recognizing the poses of the hand in
dynamic movement. Dynamic hand gesture
prediction from the movement of the hand before
completed. This system is introduced by Chen et al.
(Chen, 2015). They enabled to identify of 36
patterns which comprise 26 letters and ten numbers.
For this task, the SVM algorithm and a leap motion
sensor are used. The others application is to identify
the movement of the user's hand to translate to the
text line. The Hidden Markov Model (HMM) is used
by this system to identify the gestures of the hand.
664
Pamungkas, D. and Hendratmo, S.
Gesture Recognizing using Naïve Bayes Algorithm and a Leap Motion.
DOI: 10.5220/0010950700003260
In Proceedings of the 4th International Conference on Applied Science and Technology on Engineering Science (iCAST-ES 2021), pages 664-667
ISBN: 978-989-758-615-6; ISSN: 2975-8246
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
Moreover, a leap motion is also used to sense the
poses of the hand (Agarwal, 2015).
Several researchers have done studies about the
identification of Sign Language. The American Sign
Language recognition using HMM is done by Fok et
al. (Fok, 2015). In comparison, the Arabic Sign
Languages is studied by Mohandes et al. (Mohandes,
2014). They used a Multi-layer perceptron Neural
Network (MLP). The Euclidean distance and Cosine
similarity are used for Indian Sign Language
(Mapari, 2015).
The robot hand is controlled using the user's
palm, which has been researched by Bassily et al.
(Bassily, 2014). This system uses leap motion to
obtain the position of the palm of the user.
For this study, the Naïve Bayes algorithm is used
for identifying the gestures of the hand. Naive Bayes
is a simple probabilistic classifier that calculates a
set of probabilities by adding up the frequencies and
combinations of values from a given dataset. To
explain the Naive Bayes method, please note that the
classification process requires a number of
instructions to determine what class is suitable for
the analyzed sample. Therefore, the Naive Bayes
method above is adjusted as follows:
𝑥
|
𝑐
(1
)
𝑃𝑐
│
𝑋 𝑃𝑥
|
𝑐
x .. 𝑃
𝑥
|
𝑐
x 𝑃𝑐
(2
)
Where:
P(c|x) is the probability of posterior class c with
attribute x
P(x|c) is the likelihood which the probability of
the predictor given class
P(x) is the probability of class x
P(c) is the probability of class a
X = (x
1
,x
2
…., x
n
)
In this classification, all features/values are
assumed to be independent of each other in each
class. Because of this, even if a value is dependent
on one another, this classification will consider all
data to be independent thus giving a probability
effect. One of the advantages of Naive Bayes is that
only the mean and standard deviation values of the
variables are needed to estimate the parameters of
the classification:
μ
1
𝑛
𝑥
(3
)
σ
∑
𝑥
𝜇
(4
)
Where:
µ is the mean of the attribute in a class
σ is the variance of the feature in a class
The decision-making rule for classification is to
choose one more possibility based on the results of
the density of probability values, such as the Gauss
Density equation.
𝑓
𝑥
1
√
2𝜋𝜎
𝑒
(5
)
3 METHODS
To examine the system's effectiveness in identifying
the hand's gesture, a system comprised of a hand
tracking sensor and connected to a computer. This
computer is to process the recognize algorithm also
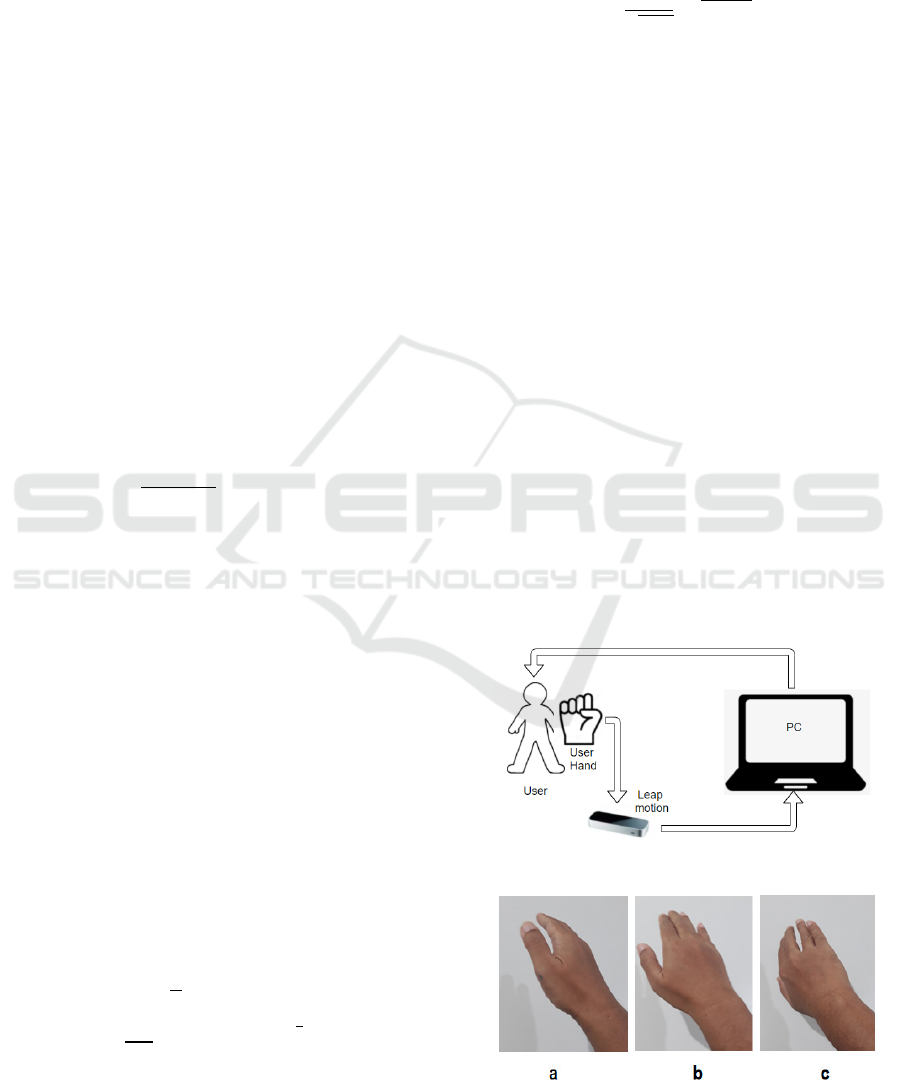
to run the game to test the results. The block
diagram of the system is shown in figure 1.
The hand poses used by this study are the
gestures. The gestures are the hand that rolls to the
left, roll to the right, and hand that face downward.
Figure 2 shows the motions of the hand that were
used in this experiment.
Figure 3 shows the flow chart of the system. In
the Naïve Bayes classification algorithm, the process
is divided into two phases, namely the training and
test phase. In the training phase, the algorithm is
given the parameters of the movements. For this
experiment, yaws, pitch, and roll of the palm of the
hand for each pose are supplied to the algorithm.
After the training phase is finish, the algorithm
will provide the values that used in the test phase. In
this phase, each gesture will determine the success
rate.
Figure 1: Block Diagram of the proposed system.
Figure 2: (a) Roll to the left (b) face downward (c) roll to
the right.
Gesture Recognizing using Naïve Bayes Algorithm and a Leap Motion
665
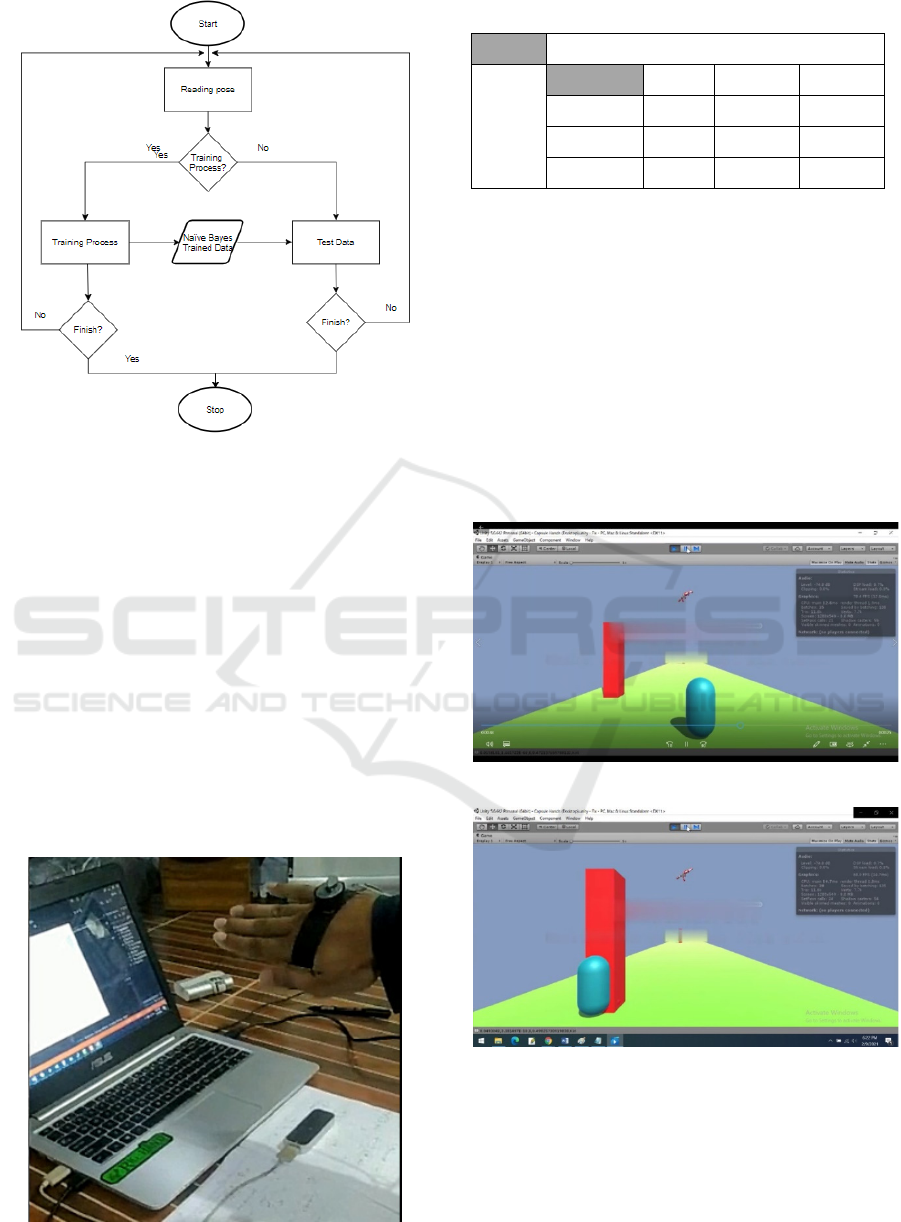
Figure 3: Flowchart of the system.
4 RESULTS
A male 24years old subject is done the experiments.
He never used the leap motion before. He uses the
dominant hand to do the experiments. Figure 4
shows the right hand of the subject maneuverings his
hand above the leap motion sensor. He performed
the training phase. For each pose, he has done it five
times. To examine the algorithm, the subject has
performed the tests. He was moving his hand five
times for each gesture. Table 1 shows the results of
the test in the confusion matrix. From this table, the
percentage of the successful classification is about
93%.
Figure 4: Subject hand above the sensor.
Table 1: The Confusion matrix.
Predicted
Actual
Left Middle Right
Left 5 0 0
middle 0 5 0
Right 0 1 4
To demonstrate the effectiveness and the reaction
of the system, a costumed game is designed. In this
game, the classification system is included. This
game is to control a cylinder to avoid the obstacle.
This cylinder is controlled by the gesture of the
hand. To move to the left, the user has to roll their
hand to the left. Also, to go to the right, the user has
to roll their hand to the right. The subject never
plays the game before. The subject feels that the
system is responsive. The system enables to
identification of the movement of the hand fast. He
is able to control the movement of the cylinder
easily.
(a)
(b)
Figure 5: The screen shoot of the game (a) success to
avoid the obstacle (b) bump the obstacle.
iCAST-ES 2021 - International Conference on Applied Science and Technology on Engineering Science
666

4 CONCLUSIONS
This article shows how the Naïve Bayes theorem to
be applied to identify the hand gestures. The poses
of the hand is sense using a stereo infrared camera.
The experiments show that the system enables to
recognize the movement of user hand. The
successful rate of identify the poses is around 93%.
Moreover, the proposed system is responsive to read
the hand poses. It shows in the application in the
game. In the future this system will be used to be
applied in the advanced games. This system will be
combining with the tactile actuators, to make user
more immersive with the game.
ACKNOWLEDGEMENTS
This research was supported by Kementrian
Pendidikan, Kebudayaan, Riset dan Kebudayaan
Indonesia.
REFERENCES
Agarwal, C., Dogra, D., Saini, R., & Roy,P. (2015).
Segmentation and recognition of text written in 3D
using Leap motion interface. 539-543.
10.1109/ACPR.2015.7486561.
Andrean, D., Pamungkas, D., & Risandriya, S.K. (2019).
Controlling Robot Hand Using FFT as Input to the NN
Algorithm.
Andreoni, G., Parini, S., Maggi, L., Piccini, L., Panfili, G.,
& Torricelli, A. (2007). Human Machine Interface for
Healthcare and Rehabilitation. Advanced
Computational Intelligence Paradigms in Healthcare -
2.
Bassily, D., Georgoulas, C., Guettler, J., Linner, T., &
Bock, T. (2014). Intuitive and Adaptive Robotic Arm
Manipulation using the Leap Motion Controller. ISR
2014.
Chen, Y., Ding, Z., Chen, Y., & Wu, X. (2015). Rapid
recognition of dynamic hand gestures using leap
motion. 2015 IEEE International Conference on
Information and Automation, 1419-1424.
Fok, K., Ganganath, N., Cheng, C., & Tse, C., (2015). A
Real-Time ASL Recognition System Using Leap
Motion Sensors 2015 International Conference on
Cyber-Enabled Distributed Computing and
Knowledge Discovery (CyberC), Xi'an, China, 2015
pp. 411-414.doi: 10.1109/CyberC.2015.81
Huang, J., Zhou, W., Li, H., & Li, W. (2015). Sign
Language Recognition using 3D convolutional neural
networks. 2015 IEEE International Conference on
Multimedia and Expo (ICME), 1-6.
Liu, F., Zeng, W., Yuan, C., Wang, Q., & Wang, Y.
(2019). Kinect-based hand gesture recognition using
trajectory information, hand motion dynamics and
neural networks. Artificial Intelligence Review, 52,
563-583.
Mapari, R.B., & Kharat, G. (2015). Real time human pose
recognition using leap motion sensor. 2015 IEEE
International Conference on Research in
Computational Intelligence and Communication
Networks (ICRCICN), 323-328.
Mohandes, M., Aliyu, S., & Deriche, M. (2014). Arabic
sign language recognition using the leap motion
controller. 2014 IEEE 23rd International Symposium
on Industrial Electronics (ISIE), 960-965.
Sonkusare, J. S., Chopade, N. B., Sor, R., and Tade, S. L.,
(2015). A Review on Hand Gesture Recognition
System, 2015 International Conference on Computing
Communication Control and Automation, 2015, pp.
790-794, doi: 10.1109/ICCUBEA.2015.158.
Gesture Recognizing using Naïve Bayes Algorithm and a Leap Motion
667
