
Decomposition of Classification Context as a Tool for Big Data
Management
Xenia Naidenova
1a
1
Military medical academy, Lebedev Street, Saint Petersburg, Russia
Keywords: Big data, formal concept, classification context, context decomposition, good classification tests.
Abstract: The paper considers a problem of generating all classification Good Maximally Redundant Tests (GMRTs)
as the set of all maximal elements of the formal concept lattice generated over a classification context. The
number of concepts is exponential in the size of input context and decomposing contexts is one of the methods
to decrease the computational complexity of inferring GMRTs. Three kinds of sub-contexts are defined:
attributive, object and object-attributive ones. The rules of reducing sub-contexts are given. The properties of
the sub-contexts are analysed related to the fact that the set of all GMRTs in a classification context is a
completely separating system. Some strategies are considered for choosing sub-contexts based on the
definition of essential objects and attribute values. The rules of the decomposition proposed imply
constructing some incremental procedures to construct GMRTs. Two methods of pre-processing the formal
contexts greatly decreasing the computational complexity of inferring GMRTs are proposed: finding the
number of subtasks to be solved (the number of essential values) and the initial content of the set of GMRTs.
Some unsolved problems difficult for analytical investigations have been formulated. The decomposition
proposed can be fruitful in processing big data based on machine learning algorithm.
1 INTRODUCTION
The paper considers a symbolic machine learning
problem of generating all classification Good
Maximally Redundant Tests (GMRTs) as the set of
all maximal elements of the formal concept lattice
generated over a classification context. GMRTs
provides a basis for mining logical rules from data.
The number of concepts is exponential in the size of
input context and decomposing contexts is one of the
methods to decrease the computational complexity of
inferring GMRTs.
Unfortunately, not enough attention has been paid
to the methods of formal context decomposition due
to its analytical difficulty and, at least in part, by the
consideration that having good algorithm for lattice
construction is more important than decomposing
formal contexts in sub-contexts.
Our attention has been attracted to the following
methods of decomposing formal contexts described
in literature. The first one has been developed by Ch.
Mongush and V. Bykova, 2019. In this method, some
fragments of the initial context are partitioned into the
a
https://orcid.org/0000-0003-2377-7093
so-called boxes. The division of context into boxes is
“safety”, i. e. the formal concepts are not lost and new
formal concepts do not arise during the
decomposition. It is proved that the number of boxes
arising at each iteration of the decomposition is equal
to the number of unit elements of the 0,1-matrix
representing the initial formal context. The number of
boxes at each iteration can be reduced by constructing
mutually disjoint chains of boxes.
The second method of decomposition has been
proposed by T. Qian, L. Wei, J.-J. Qi, 2017. This
method is based on sub-contexts, closed relation and
pairwise non-inclusion covering on the attribute set.
The authors provide the method and algorithm of
constructing the concept lattice based on a
decomposition theory proposed. They also consider
the similar decomposition theory based on the object
set. Combining the above two decompositions is
used.
In our paper, three kinds of sub-contexts are
defined: attributive, object and object-attributive
ones. The rules of forming and reducing sub-contexts
are given. The properties of the determined sub-
Naidenova, X.
Decomposition of Classification Context as a Tool for Big Data Management.
DOI: 10.5220/0010732800003101
In Proceedings of the 2nd International Conference on Big Data, Modelling and Machine Learning (BML 2021), pages 295-300
ISBN: 978-989-758-559-3
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
295
contexts are analyzed related to considering all the
GMRTs for a given formal context as a completely
separating system of the subsets of a finite set
(Dickson, 1969). The definition of GMRTs is given
via two interrelated Sperner systems (Sperner, 1928):
the family of test’s intents and the family of test’s
extents. Some strategies are considered for choosing
sub-contexts in inferring GMRTs based on the
definition of essential object and value of attribute.
We formulate, in conclusion, some very important but
not yet investigated problems connected with the
formal context decomposition considered in this
paper.
The paper is organized as follows: Section 2
describes GMRT as a formal concept, Section 3 gives
the rules of decomposing classification contexts,
Section 4 gives the rules for reducing classification
contexts, Section 5 represents some strategies for
decomposing contexts. We complete with a short
conclusion.
2 DEFINITION OF GMRT
A classification context is a set (G, M, I, AClass),
where G is a set of objects, M is a set of attribute
values (values, for short), I = GM is a binary relation
between G and M, and AClass is a set of additional
attributes by values of which the given set of objects
is partitioned into disjoint classes.
Denote a description of object g ∈ G by δ(g), and
descriptions of positive and negative objects by D+ =
{δ(g)| g ∈ G+} and D− = {δ(g)| g ∈ G−}, respectively.
The Galois connection (Ore, 1944) between the
ordered sets (2
G
, ⊆) and (2
M
, ⊆), is defined by the
following mappings called derivation operators
(Ganter & Wille, 1999): for A ⊆ G and B ⊆ M, val(A)
= ⋂δ(g), g∈A, and obj(B) = {g|B ⊆ δ(g), g ∈ G}.
In our approach, there are two closure operators:
generalization_of(B) = val(obj(B)) and
generalization_of(A) = obj(val(A)). A is closed if A
= obj(val(A)) and B is closed if B = val(obj(B)). If
(val(A) = B) & (obj(B) = A), then a pair (A, B) is
called a formal concept (Ganter & Wille, 1999),
subsets A and B of which are called concept extent
and intent, respectively. According to the values of a
goal attribute K from AClass, we get some possible
forms of the formal contexts: Kϵ := (Gϵ, M, Iϵ ) and
Iϵ := I ∩ (Gϵ × M), where ϵ ∈ rng(K), rng(K) = {+,
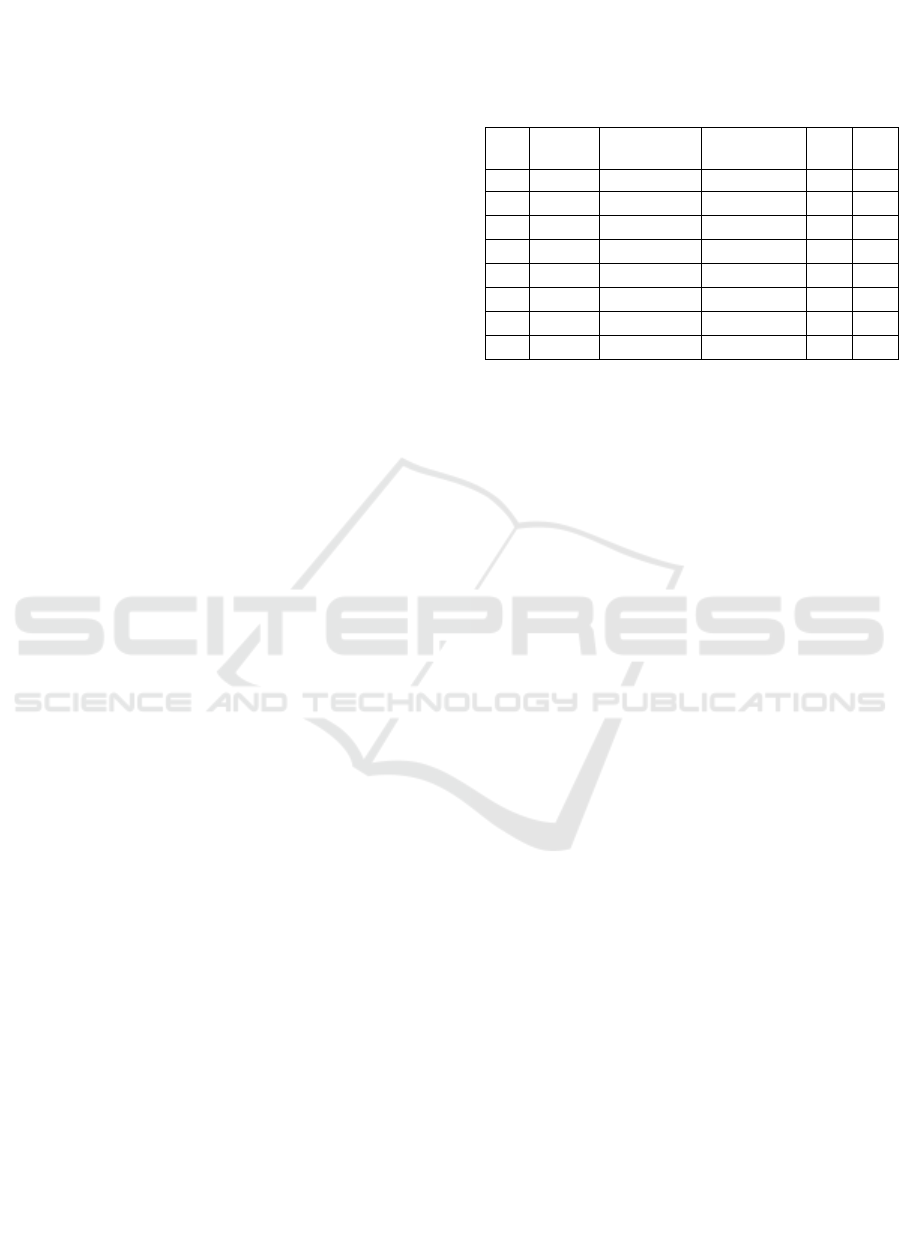
−}. A classification context K± (G±, K, G± × K) is
formed after adding the classification attribute. A
context K± is illustrated by Table 1.
Definition 1. A diagnostic test (DT) for K+ is a
pair (A, B) such that B ⊆ M, A = obj(B) ̸= ∅, A ⊆ G+,
and obj(B)∩G− = ∅.
Table 1: An example of classification context
No Height Color of
hai
r
Color of
E
y
es
K1 K2
1 Small Blon
d
Blue + +
2 Small Brown Blue
−
+
3 Tall Brown Hazel
−
+
4 Tall Blond Hazel
− −
5 Tall Brown Blue
− −
6 Small Blond Hazel
− −
7 Tall Red Blue +
−
8 Tall Blond Blue +
−
Definition 2. A diagnostic test (A, B) for K+ is
said to be maximally redundant if obj(B ∪ m) ⊂ A for
all m ∈ M \ B.
Definition 3. A diagnostic test (A, B) for K+ is
said to be good iff any extension A1 = A ∪ i, i ∈ G+
\ A, implies that (A1, val(A1)) is not a DT for K+.
A maximally redundant DT which is
simultaneously good is called a good maximally
redundant DT. Any object description (g) is a
maximally redundant collection of values because for
any value m (g), m M, obj((g) m) = .
Definitions of tests (as well as other definitions),
associated with K+, are applicable to K−. In general,
a set B is not closed for DT (A, B), consequently, DT
is not necessarily a formal concept. A GMRT can be
regarded as a special type of formal concept
[Naidenova, 2012].
An example in Table 1: ({1, 8},{Blond, Blue}) is
a GMRT for K1 = + (K1+), ({4, 6},{Blond, Hazel})
is a DT for K1 = − (K1−) but not a good one, and ({3,
4, 6}, {Hazel}) is a GMRT for K1−.
2.1 GMRT as a Sperner System
It is clear that the set of intents of all diagnostic tests
for K+ (call it ‘DT(+)) is the set of all the collections
t of values for which the condition obj(t) G+ is true.
The set DT(+) is the ordered set w. r. t. inclusion
relation. This consideration leads to the next
definition of good diagnostic test.
Definition 4. A diagnostic test (A, B) for K+ is
said to be good iff obj(B) G+ and, simultaneously,
the condition obj(B) obj(B*) G+ is not satisfied
for any B*, B* M, such that B* B.
This definition means that the family of the
extents of all good tests for K+ is a family of maximal
elements of DT(+) and it is therefore a Sperner system
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
296

(Sperner, 1928). On this basis, we can give the
following definition for the GMRTs.
Definition 5. To find all the GMRTs for a given
K+ means to construct a family PS of subsets s1, s2,
…, sj, …, snp of G+ such that:
1) PS is a Sperner system;
2) each sj is a maximal set in the sense that adding
to it any object g such that g sj, g G+ implies that
obj(val(sj g)) ̸⊆ δ(g), ∀g ∈ G+.
3) The set of all GMRTs is determined as follows:
{(sj, val(sj)), sj PS, j = 1, …, np}, where {val(sj)}
is also a Sperner System.
Some algorithms NIAGaRa and DIAGaRa to find
all the GMRTs in a classification context are
described in (Naidenova, 2006). The Diagnostic Test
Machine (DTM) is given in (Naidenova & Shagalov,
2009). The experiment conducted with the publicly
available database (Schlimmer, 1987) of 8124
mushrooms showed that the result of the DTM turned
out to be 97,5% w.r.t. classification accuracy.
3 RULES OF DECOMPOSING
CLASSIFICATION CONTEXT
To transform inferring GMRTs into an incremental
process, we introduce three kinds of subtasks for K+
(K−), called subtasks of the first, second and third
kind, respectively:
1. Given a positive object g, find all GMRTs
(obj(B), B) for K+ such that B is contained in δ(g). In
the general case, instead of δ(g) we can consider any
subset of values B1, such that B1 ⊆ M, obj(B1) ̸= ∅,
B1 ̸⊆ δ(g), ∀g ∈ G−.
2. Given a non-empty set of values B ⊆ M such
that (obj(B), B) is not a DT for positive objects, find
all GMRTs (obj(B1), B1) such that B ⊂ B1.
3. Given a value m M and object g G+, find
all the GMRTs (X, val(X)) such that X obj(m),
val(X) (g).
One can easily see that each subtask of the first,
second or third kind is simpler than the initial one,
because each object description contains only some
subset of values from M and each subset B ⊆ M
appears only in a part of the set of objects
descriptions.
Accordingly, we define three kinds of sub-
contexts of a given classification context called the
object, attribute value and attribute value-object (or
object-attribute value) projections, respectively. If
(G, M, I) is a context and if N ⊆ G, and H ⊆ M, then
(N, H, I ∩ N × H) is called a sub-context of (G, M, I).
Definition 6 (Naidenova & Parkhomenko, 2020).
The object projection ψ(K+, g) returns the sub-
context (N, δ(g), J), where N = {n ∈ G+ | n satisfies
(δ(n) ∩ δ(g) is the intent of a test for K+)}, J = I+ ∩
(N × δ(g)).
Definition 7 (Naidenova & Parkhomenko, 2020).
The attribute value projection ψ(K+, B) returns the
sub-context (N, B, J), where N = {n ∈ G+ | n satisfies
(B ⊆ δ(n))}, J = I+ ∩ (N × B).
Definition 8. The attribute value-object
projection ψ(K+, m, g) is the intersection of two
projections: attribute value projection ψ(K+, m) and
object projection ψ(K+, g).
In the case of negative objects, symbol + is
replaced by symbol − and vice versa.
The decomposition of inferring GMRTs into the
subtasks requires the following actions:
1. Select an object, attribute value or a pair of
attribute value - object to form a subtask.
2. Form the subtask (projection).
3. Reduce the subtask (projection).
4. Solve the subtask.
5. Reduce the parent classification context when
the subtask is over.
4 RULES OF REDUCING
CLASSIFICATION CONTEXT
It is essentially that the projection is simply a subset
A* of objects defined on a certain restricted subset B*
of values.
Let objϵ(m) be a set of positive or negative objects
{obj(m) ∩ Gϵ}, where ϵ ∈ rng(K). Then for any B ⊆
M objϵ(B) = ⋂m∈B objϵ(m), where ϵ ∈ rng(K).
Let Sgood+ be the partially ordered set of
obj+(m), m ∈ M satisfying the condition that
(obj+(m), val(obj+(m))) is a current GMRT (in any
algorithm of inferring GMRTs) for K+. Sgood− for
K− is defined based on obj− (m).
Essentially, the process of forming Sgood is an
incremental procedure of finding all maximal
elements of a partially ordered (by the inclusion
relation) set. It is based on topological sorting of
partially ordered sets. Thus, when the algorithm is
over, Sgood contains the extents of all the GMRTs for
K+ (for K−) and only them (Naidenova &
Parkhomenko, 2020). The operation of inserting an
element A∗ into Sgood (in the algorithm formSgood
(Naidenova & Parkhomenko, 2020) under the
lexicographical ordering of these sets is reduced to
lexicographically sorting a sequence of k-element
collections of integers. A sequence of n-collections
Decomposition of Classification Context as a Tool for Big Data Management
297

whose components are represented by integers from
1 to |M|, is sorted in time of O(|M| + L), where L is
the sum of lengths of all the collections of this
sequence (Hopcroft et al., 1975). Consequently, if
Lgood is the sum of lengths of all the collections A of
Sgood, then the time complexity of inserting an
element A∗ into Sgood is of order O(|M| + Lgood).
The set Tgood of all the GMRTs is obtained as
follows: Tgood = {t | t = (A, val(A)), A ∈ Sgood}
It is useful to introduce the characteristic W(m),
m B* named by the weight of m in the projection:
W(m) = obj+(m) or W(m) = obj− (m) is the
number of positive (negative) examples of the
projection containing m. Let WMIN be the minimal
permissible value of the weight.
The following reduction rules are determined:
Rule 1. For each value m in the projection, the
weight W(m) is determined and if the weight is less
than WMIN, then the value m is deleted from the
projection.
Rule 2. We can delete the value m if W(m) is
equal to WMIN and (obj+(m), val(obj+(m)) is not a
test; in this case m will not appear in a GMRT with
the weight of its intent equal to or greater than
WMIN.
Rule 3. The value m can be deleted from the
projection if obj+(m) s’ for some s’ Sgood+.
Rule 4. If obj(val(obj+(A)) = obj+(A), then the
value A is deleted from the projection and obj+(A) is
stored in SGOOD+ if obj+(A) corresponds to a
GMRT at the current step.
Rule 5. If at least one value has been deleted from
the projection, then the following its reduction is
necessary. The reduction consists of deleting the
elements of projection that do not correspond to tests
(as a result of previous eliminating values). If, under
reduction, at least one element has been deleted from
the projection, then applying Rule 1 – Rule 5 are
repeated.
Algorithms for GMRTs inferring based on these
rules have been described in (Naidenova, 2006;
Naidenova & Parkhomenko, 2020].
Rule 1 is based on the following Theorem 1
(Naidenova, 2006):
THEOREM 1.
Let m M, (Y, X) be a maximally redundant test
for G+ and obj(m) obj(X) =Y. Then m does not
belong to the intent of any maximally redundant good
test for G+ different from X.
Consider an example of reducing a sub-context
for K−, where − is the value of K2 in Table 1. The
result of the attribute value projection ψ(K−, Tall) is
in Table 2. In Table 2, obj−(Blue) = {5, 7, 8}, but
obj(Tall, Blue) = {5, 7, 8}, and, consequently,
(obj(Tall, Blue),{Tall, Blue}) is a DT for K2 = −. We
have also obj−(Brown) = {5} and obj−(Red) = {7},
but both {5} ⊂ {5, 7, 8} and {7} ⊂ {5, 7, 8}, and,
consequently, there does not exist any good test
which contains simultaneously the values ‘‘Tall’’ and
‘‘Brown’’. ‘‘Red’’ is not a good test for K−. Then one
can delete ‘‘Blue’’, ‘‘Red’’ and ‘‘Brown’’ from the
sub-context. The result is shown in Table 3. Note, that
the descriptions of objects 5 and 7 are included in the
description of object 3 for K+ (see Table 1) and these
objects are deleted. Objects 4 and 8 form the extent of
a test for K− equal to (obj(Tall, Blond),{Tall,
Blond}).
Table 2: Attribute-value projection for K2 = − in Table 1.
No Height Color of
hai
r
Color of
E
y
es
4TallBlon
d
Hazel
5TallBrown Blue
7TallRe
d
Blue
8TallBlon
d
Blue
Table 3: The projection of Table 2 after reducing.
No Height Color of
hai
r
Color of
eyes
4TallBlon
d
Hazel
5Tall
7Tall
8TallBlon
d
5 STRATEGIES OF
DECOMPOSING
The advantage of a projection-forming operation is to
increase the likelihood of finding all the GMRTs
(contained in the projection) by only one passing of
it. By limiting the number of tests contained in the
projection, we increase the probability of their
separation, that is, the probability of finding exactly
those attributes (values) or objects that will enter only
one test in the projection considered. Let's explain this
idea.
Any subset t1,…, ti, tj,.. , tk of GMRTs and
corresponding to it subset val(t1), val(t2), …, val(ti),
val(tj),...., val(tk), where t1,…, ti, tj,.. , tk are intents
of GMRTs are two systems of completely separating
subsets. It means that for any pair (ti, tj) there is such
a pair of values (mq, mf) that mq occurs in ti and does
not occur in tj, and mf occurs in tj and is not found in
ti. Analogously, for any pair of val(ti), val (tj), there
is such a pair of objects (gq, gf), that gq is found in
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
298
val(ti) and is not found in val(tj), and gf is found in
val(tj) and is not found in val(ti).
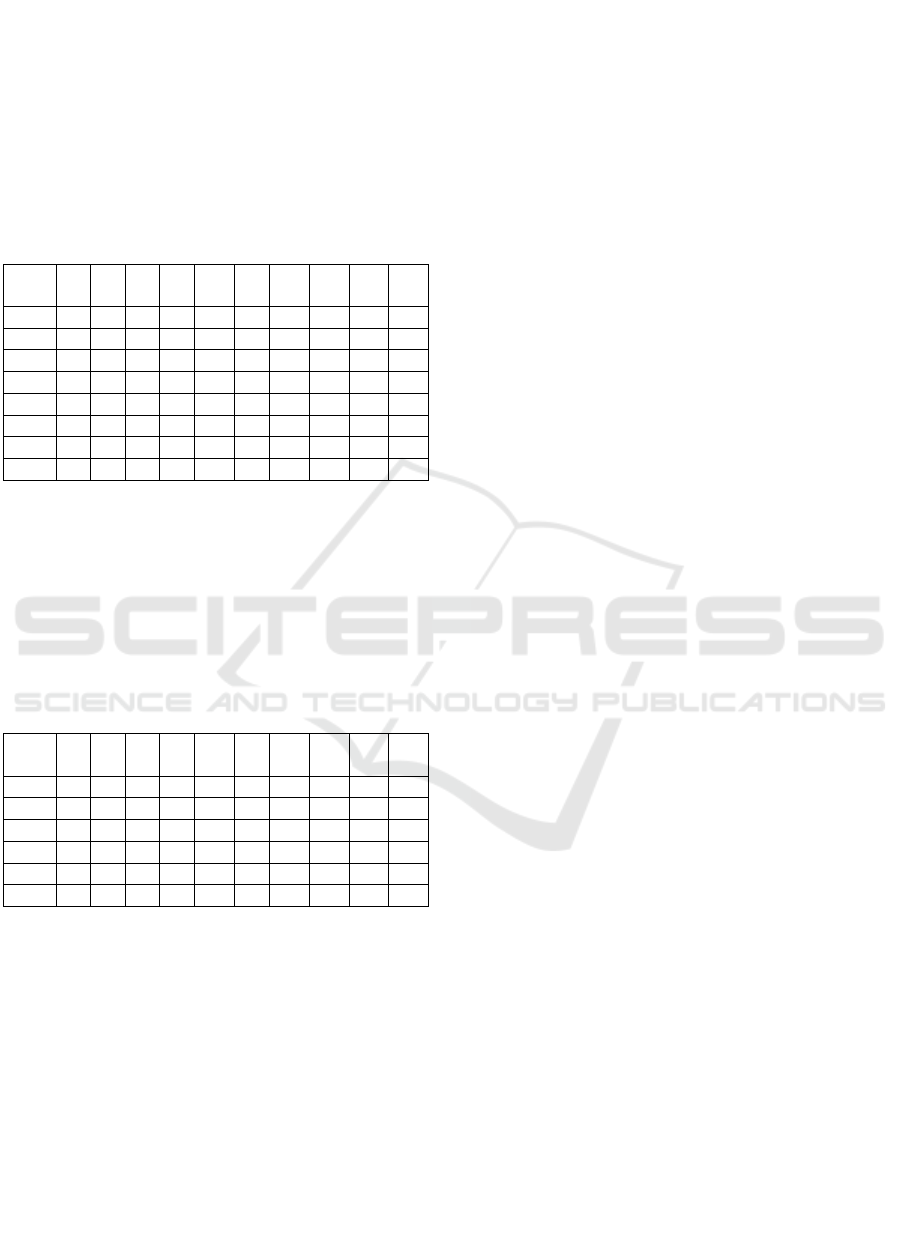
The phenomenon of a completely separating
system of GMRTS can be illustrated in a projection
in Table 4 (this example is extracted from a real task).
In this example, the projections t9, t12 of objects
9 and 12 do not contain any intents of tests, we can
delete the corresponding lines. The result is in Table
5, where:
Table 4: Example of a projection.
t\A A
3
A
6
A
7
A
*
A
13
A
+
A
19
A
20
A
21
A
22
8 1 1 1 1 1 1 1 1 1 1
6 0 0 1 0 0 0 0 1 1 0
4 0 1 1 0 0 1 0 1 1 0
7 1 1 0 0 0 1 0 1 0 1
9 0 0 0 0 0 0 1 1 1 1
11 1 0 1 0 0 0 1 1 1 1
10 1 1 0 1 1 0 0 1 1 0
12 1 0 0 0 0 0 0 1 1 0
Obj+(m7) = {4,6,8,11}, val({4,6,8,11}) = {m7
m20 m21 } corresponds to a test,
Obj+(m22) = {7,8,11}, val({7,8,11}) = {m3 m20
m22} corresponds to a test,
obj(m13) = obj(A*) = {8,10}, valt({8,10}) = {m3
m6 m* m13 m20 m21 } corresponds to a test.
Delete m22, m7, m13, and m* and reducing the
projection. After reducing, this subtask is over.
Table 5: The projection after reducing.
t\A A
3
A
6
A
7
A
*
A
13
A
+
A
19
A
20
A
21
A
22
8 1 1 1 1 1 1 1 1 1 1
6 0 0 1 0 0 0 0 1 1 0
4 0 1 1 0 0 1 0 1 1 0
7 1 1 0 0 0 1 0 1 0 1
11 1 0 1 0 0 0 1 1 1 1
10 1 1 0 1 1 0 0 1 1 0
All the GMRTs in this projection have been
revealed by only one passing.
Before entering into the details of choosing
projections when decomposing the classification
contexts, we need the following definitions of
essential value and essential object.
Definition 9. Let B be a set of values such that
(obj(B), B) is a DT for K+ (K−). The value m ∈ B, B
⊆ M is essential in B if (obj(B \ m), (B \ m)) is not a
DT for a given set of objects.
Generally, we are interested in finding one of the
maximal subsets sbmax(B) ⊂ B such that (obj(B), B)
is a DT but (obj(sbmax(B)), sbmax(B)) is not a DT
for a given set of positive (negative) objects. Then
sbmin(B) = B \ sbmax(B) is one of minimal subsets
of essential values in B.
The number of subtasks of the second kind is
determined by the number of essential values in M or
its subsets. Let the set Lev be equal to sbmin(M).
Proposition 1. Each essential value is included in
at least one positive object description.
Proof of Proposition 1. Assume that for an object
description δ(g), g ∈ G+, we have δ(g) ∩ Lev = ∅.
Then δ(g) ⊆ M \ Lev. But M \ Lev is included in at
least one of the negative object descriptions and,
consequently, δ(g) also possesses this property. But
this contradicts the fact that δ(g) is the description of
a positive object.
Corollary 1 (of Proposition 1). If B ⊆ M and B ∩
Lev = ∅, then (obj(B), B) is not a test for K+.
Corollary 2 (of Proposition 1). For finding all the
GMRTs contained in K+, it is sufficient to find all the
GMRTs only for sub-contexts associated with
essential values in Lev for M.
Definition 10. Let A ⊆ G+, assume that (A,
val(A)) is not a DT for K+ (K−). The object g, g ∈ A
is said to be an essential in A, if (A\g, val(A\g))
proves to be a DT for a given set of positive objects.
Generally, we are interested in finding one of the
maximal subsets sbmax(A) ⊂ A such that (A, val(A))
is not a DT but (sbmax(A), val(sbmax(A))) is a DT
for K+.
It is clear that if m enters into the intent of a test
for K+, then its extent is in obj+(m). It is theoretically
possible to find one of the maximal A* subsets of
obj+(m), such that (A*, val(A*)) is a DT for K+ (K−).
This operation allows to find the initial content of
Sgood (Naidenova & Parkhomenko, 2020).
The quasi-minimal subset of essential values in M
and quasi-minimal subset of essential objects in
obj+(m), for all mM can be found by a simple
procedure described in (Naidenova & Parkhomenko,
2020). This procedure is of linear computational
complexity w.r.t. the cardinality of M.
The process of using the decomposition of formal
context based on choosing essential object or value to
form the projections consists in the following steps:
Choose an essential value (object) in a projection;
forming the corresponding sub-projection;
Find all the GMRTs in the sub-projection (sub-
context);
Delete value (object) from the parental context;
Reducing the parental context;
Determine whether the procedure of finding all
the GMRTs is over.
Using the third decomposition based on selecting
an essential object and an essential value
simultaneously is effective when this value enters the
Decomposition of Classification Context as a Tool for Big Data Management
299

quasi-minimal set of essential values in the
description of this selected object and this essential
object enters the quasi-minimal set of essential
objects for this selected value.
If the essential value is the only one w.r.t. the
selected object, then one can remove this object from
consideration after the subtask is resolved. Similarly,
if the essential object is the only one related to
selected value, then one can remove this value from
consideration after the subtask is over. These
deletions result in a very effective reduction in the
formal context considered.
Another advantage of selecting essential values
and objects simultaneously is the fact that this way
greatly supports the property of the complete
separating the families of extents and intents of
GMRTs.
It is important to formulate some unsolved and
nontrivial problems related to the decomposition
considered in this paper. These problems are:
How to recognize a situation that current formal
classification context contains only the GMRTs
already obtained (current context does not contain
any new GMRTs)?
How to evaluate the number of recurrences
necessary to resolve a subtask in inferring GMRTs?
(if we use a recursive algorithm like DIAGARA)?
How to evaluate the perspective of a selected sub-
context with respect to finding any new GMRT?
These problems are interconnected and the
subject of our further research. The effectiveness of
the decomposition depends on the properties of the
initial classification context (initial data). Now we
can propose some characteristics of data (contexts
and sub-contexts) useful for choosing a projection:
the number of objects, the number of attribute values,
the number of the GMRTs already obtained and
covered by this projection. It may be expedient to
select essential object with the smallest number of
entering elements of Sgood and, simultaneously, with
the largest number of entering obj+(m), mM.
Our experiments show that the number of
subtasks to be solved always proved to be smaller
than the number of essential values.
6 CONCLUSION
In this paper, we considered one of the possible
methods for decomposing classification contexts to
find all GMRTs in them. We gave the definitions of
three type of decomposing and, accordingly, three
type of context projections and subtasks of inferring
GMRTs. We revealed the role of finding essential
attribute values and objects for choosing and
resolving subtasks. Some ways to select the
projections were given in this paper. Two methods of
preprocessing the formal contexts (sub-contexts)
greatly decreasing the computational complexity of
inferring GMRTS are proposed: finding the number
of subtasks to be solved (the number of essential
values) and the initial content of the set Sgood. Some
unsolved problems difficult for analytical
investigations have been formulated. Currently,
experimental studies of the decompositions’
computational effectiveness on various data sets are
conducted.
REFERENCES
Bykova, V., Mongush, Ch., 2019. Decompositional
approach to research of formal contexts. Applied
Discrete Mathematics, 44, 113–126 DOI:
https://doi.org/10.17223/20710410/44/9
Dickson, T.J., 1969. On a problem concerning separating
systems of a finite set. J. Combin. Theory 7(3), 191-
196.
Ganter, B. and Wille, R., 1999. Formal Concept Analysis:
Mathematical Foundations, Springer, Berlin.
Hopcroft, J., Ullman, J., and Aho, A., 1975. The Design and
Analysis of Computer Algorithms, Addison-Wesley.
Naidenova, X. and Parkhomenko, V., 2020. Contribution to
attribute and object sub-contexts in inferring good
maximally redundant tests. Discrete Applied
Mathematics 273, 217–231.
Naidenova, X. and Shagalov, V., 2009. Diagnostic test
machine. In Proceedings of the ICL 2009, Kassel
University Press, pp. 79–84.
Naidenova, X., 2012. Good classification tests as formal
concepts. In F. Domenach, D. Ignatov, J. Poelmans
(Eds.), LNAI 7278, pp. 211–226.
Naidenova, X., 2006. An incremental learning algorithm
for inferring logical rules from examples in the
framework of the common reasoning process. In E.
Triantaphyllou, G. Felici (Eds.), Data Mining and
Knowledge Discovery Approaches Based on Rule
Induction Techniques, in Massive Comp., vol. 6,
Springer, pp. 89–147.
Ore, O., 1944. Galois connections. Trans. Amer. Math. Soc.
55,494–513.
Qian, T., Wei, L., and Qi, J.-J., 2017. Decomposition
methods of formal contexts to construct concept
lattices. International Journal of Machine Learning and
Cybernetics 8, 95-108.
Schlimmer, J.C., 1987. Concept acquisition through
representational adjustment (Ph.D. thesis), University
of California, Irvine.
Sperner, E., 1928. Ein Satz über Untermengen einer
endlichen Menge. Mathematische Zeitschrift, 27(1):
544–548.
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
300
