
Intelligent Variable Speed Wind Turbine Controller using the Type-2
Fuzzy Logic based on PID
Khaddouj Ben Meziane
1a
, Faiza Dib
2b
and Ismail Boumhidi
3c
1
Higher Institute of Engineering and Business (ISGA), Department of Engineering, Fez, Morocco
2
Department of Physics, Faculty of Sciences and Technology, University of Abdelmalek
Essaadi, Al Hoceima, Morocco
3
Department of Physics, Faculty of Sciences Dhar el Mahraz, SidiMohammedBenAbdellah
University, Fez, Morocco
Keywords: Wind Turbine System, Robust Control, Interval Type-2 Fuzzy System, Oscillations.
Abstract: An Intelligent and optimal Interval Type-2 Fuzzy Logic (IT2FL) based on Proportional, Integral, and
Derivative controller (IT2FLC-PID) is designed in this paper for the robust control of a Wind Turbine System
(WTS) to guarantee high and efficient stability of the system in different operating conditions. To improve
the classical PID controller efficiency and robustness, we used the interval type-2 fuzzy logic controller
(IT2FLC). However, the aim of using the IT2FLC is to overcome oscillations, imprecision, and uncertainty.
This approach is applied in this study to adjust and optimize the gains of the PID controller. We have designed
the proposed (IT2FLC-PID) to achieve considerable stability and to increase the performance of (VS-WT)
system. Furthermore, for the purpose evaluate the effectiveness and the robustness of the proposed controllers
(IT2FLC-PID), the simulation results attest that the (IT2FLC-PID) comparing with (IT1FLC-PID) and (PID)
controller produces robust stability and better response for Wind Turbine systems.
1 INTRODUCTION
Wind energy has an important role and can be
considered the most developed renewable energy
source. The level of efficiency and profitability of a
wind energy system (WES) depends very much on its
control (Apata et Oyedokun, 2020). The most of wind
energy system uses variable speed wind turbines (VS-
WT). Due to their superiority compared to fixed-
speed wind turbines (FS-WT). The characterization
of variable speed wind turbine is the capacity to adapt
the speed of the shaft in the case of changes in wind
speed (Jabbariet al. 2016; Koumir et al. 2017).
Variable speed operation is primarily related to
the type of generator that provides the mechanical-to-
electrical conversion (Wang et al. 2018). Therefore,
several research studies have been carried out on the
use of wind turbine systems (WTS), whose purpose is
the production of electricity. To achieve the
performance and efficiency of the system based on
a
https://orcid.org/0000-0001-6878-5383
b
https://orcid.org/0000-0001-8079-7467
c
https://orcid.org/0000-0001-6907-2537
the use of conventional controls such as the PID
controller. There is no such thing as the perfect PID;
it is all about compromise. Some applications will
allow an overrun to improve the stabilization time,
while others will not allow it, so it depends on the
specifications. Each of the coefficients (KP, KI, KD)
influences the response of the system. To decrease the
static error, it is necessary to decreases KP and KI.
The overshoot is reduced (ratio between the first peak
and the setpoint) if KP or KI decreases or KD
increases. The rise time decreases if KP or KI
increases or KD decreases (Apata et Oyedokun,
2020). The stabilization time decreases as KP and KI
increase. However, using this classical type of control
(PID) causes many difficulties in guaranteeing robust
performance; because there are many problems in the
wind turbine system, such as the nonlinearity of the
(WTS) systems, the uncertainties; the parameter
variation, and unknown disturbances (Dib et al.
2019).
216
Ben Meziane, K., Dib, F. and Boumhidi, I.
Intelligent Variable Speed Wind Turbine Controller using the Type-2 Fuzzy Logic based on PID.
DOI: 10.5220/0010731300003101
In Proceedings of the 2nd International Conference on Big Data, Modelling and Machine Learning (BML 2021), pages 216-221
ISBN: 978-989-758-559-3
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
The main objective of this work is to develop a
new and intelligent approach (IT2FLC-PID); the
purpose of this approach is the design of a robust and
efficient controller. Most controllers existing in the
literature use the traditional fuzzy logic system
(IT1FLC). Furthermore, there is an alternative that
uses the interval type-2 fuzzy logic controller
(IT2FLC) (Miccio and Cosenza, 2014; Ben Meziane
et al. 2019). Usually, Lotfi Zadeh has expressed a
fuzzy logic by a set of linguistic rules called fuzzy
rules, which are used to describe the dynamic
behavior of an unknown or ill-defined system (Zadeh,
1965). Since fuzzy systems are built from the
knowledge provided by the human expert, they are
fraught with uncertainties. These uncertainties are
injected at the level of the membership functions of
the antecedent and consequent fuzzy sets, which will
be uncertain. These fuzzy systems, called type-1
fuzzy systems, are unable to model these
uncertainties because they use precise membership
functions, which have a two-dimensional
representation. Therefore, type-2 fuzzy sets, whose
membership functions themselves are fuzzy, are the
extension of type-1 fuzzy systems. Membership
functions type-2 have a three-dimensional
representation, the new (third) dimension of fuzzy
sets provides an additional degree of freedom to
accommodate uncertainties. The main advantage of
type-2 fuzzy logic over type-1 fuzzy logic is its ability
to take into account linguistic and numerical
uncertainties (Mendel et al. 2006). IT2FLC; can be
used in situations where there is uncertainty about the
membership degrees themselves. For example,
uncertainty in the form of the membership function or
some of its parameters.
The (IT2FLC-PID) proposed controller is used in
this study to achieve a high performance of control in
terms of precision, variations, and external
disturbances in the (WT) system; and facilitate the
performance in damping oscillations, and increase the
stability of the (WTS). We have using the IT2FL
controller for adjusting the (Kp), (Ki), and (Kd) gains
of the conventional PID controller to obtain the
optimal parameters.
The paper is organized as follows: Section 2
presents the mathematical model of the wind turbine
system, Section 3 shows the proposed controller, the
simulation results are shown in Section 4, and the
conclusion is given in Section 5.
2 MODELING WIND TURBINE
SYSTEM (WTS)
Variable Speed Wind Turbines Systems are currently
the most widely used in the industry. The term
variable speed designates the fact that the speed of the
turbine is independent of the frequency of the power
system. The main advantage of operating the turbine
at a variable speed is to maximize the capture of the
energy available in the wind (Koumir et al. 2017).
The mathematical model of the aerodynamic
power of the wind turbine (WT) is described by the
following equation (Sid Ahmed et al. 2015):
𝑃
1
2
𝜌𝐴𝑣
(1)
The power captured by the rotor is given by the
following equation (Hamedet al. 2016):
𝑃
𝐶
𝜆,𝛽
𝑃
(2)
𝑃
1
2
𝜌𝜋𝑅
𝐶
𝜆,𝛽
𝜐
(3)
Where 𝐶
the coefficient of performance of power
and λ presents the tip speed ratio given by:
𝜆
𝜔
𝑅
𝜐
(4)
𝜔
Indicate the tangential speed of the tip of the
blade; 𝑅 design the radius of the area swept by the
rotor. The expression of wind turbine power can be
defined as follows (Lahlou et al. 2019):
𝑃
𝜔
𝑇
(5)
The aerodynamic power extracted 𝑃𝑎 is a non-
linear function of wind speed, rotor speed, and stall
angle. Then, the aerodynamic torque is converted into
mechanical power, which results in an aerodynamic
torque 𝑇𝑎, we have the following equation:
𝑇
1
2𝜆
𝜌𝜋𝑅
𝐶
𝜆,𝛽
𝜐
(6)
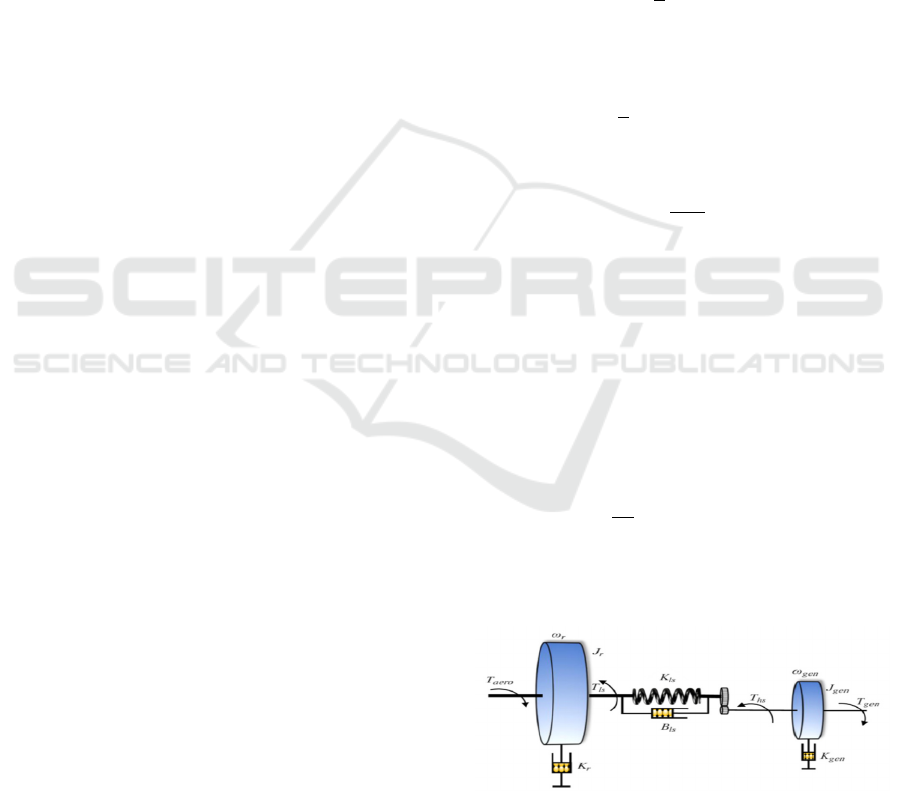
To describe the model of the wind turbine system,
generally, a two-mass model is used, which is
illustrated in Figure.1.
Figure 1: The model of a two-mass wind turbine system
(Dib et al. 2019).
Intelligent Variable Speed Wind Turbine Controller using the Type-2 Fuzzy Logic based on PID
217
The main advantages of variable speed wind turbines
compared to fixed speed ones are as follows (El
Aimani et al. 2003):
• Increased operating range, especially for low wind
speeds where maximum power can be easily
converted.
• Simplicity of the blade orientation system.
• Reduction of mechanical efforts thanks to the
adaptation of the speed of the turbine during
variations in the wind.
• Noise reduction during low power operation
because the speed is slow (Koumir et al. 2017).
.
The rotor speed 𝜔
is given in the equation (7)
(Hamed et al. 2016):
𝐽
𝜔
𝑇
𝑇
𝐾
𝜔
(7)
The torque of the low-speed shaft 𝑇
is given by
equation (8):
𝑇
𝐵
𝜃
𝜃
𝐾
𝜔
𝜔
(8)
𝐽
𝜔
𝑇
𝐾
𝜔
𝑇
(9)
If an ideal gearbox with a ratio 𝑛
is assumed, one
has (Hamed et al. 2016):
𝑛
𝑇
𝑇
𝜔
𝜔
𝜃
𝜔
(10)
By using (7)–(10), we can model the (WTS) by
equations (11):
𝜔
𝜔
𝑇
𝑐
𝑐
𝑐
𝑐
𝑐
𝑐
𝑐
𝑐
𝑐
𝜔
𝜔
𝑇
𝑏
𝑏
𝑏
𝑇
𝑏
𝑏
𝑏
𝑇
(11)
We define 𝑥
𝜔
,𝑥
𝜔
,𝑥
𝜔
, and 𝑢
𝑇
, the state space of the system is described by
equations (12) (Lahlou et al. 2019):
⎩
⎪
⎨
⎪
⎧
𝑥
𝑥
𝑥
𝑓
𝑥
𝑔
𝑥
.𝑢𝜉
𝑥,𝑡
𝑥
𝑐
𝑥
𝑐
𝑐
𝑥
𝑐
𝑥
𝑏
𝑇
𝑏
𝑢𝑥,𝑡
𝑦𝑥
(12)
The two-mass model becomes a non-linear system.
With two inputs: 𝑇𝑒𝑚 which is a controllable input,
and 𝑣, which is a non-controllable input, and at one
output, it is the rotor speed 𝜔
.To maximize the
energy captured by the wind, the variables λ and β
must be kept at their optimal values to ensure the
maximum value of Cp. Thus, the pitch angle of the
blade is fixed at its optimum value βopt. The rotor
speed ωt must be adjusted by Tem to follow the
optimal reference ω
topt
.
The nonlinearity of this system comes from the
aerodynamic torque, which depends on 𝜔𝑡 and on the
wind speed, which is a non-controllable, random, and
fluctuating input (Koumir et al. 2017).
3 INTERVAL TYPE-2 FUZZY
LOGIC BASED ON PID
CONTROLLER
3.1 Interval Type-2 Fuzzy Logic System
In recent years, the classical fuzzy logic called type-1
fuzzy logic has been developed to a new generation
called type-2 fuzzy logic. Mendel and his team
contributed a lot to its development (Mendel et al.
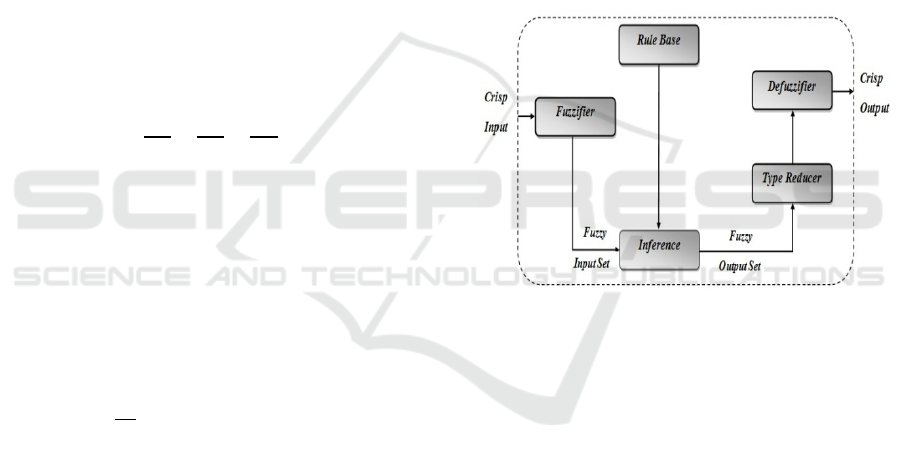
2006). The type reducer block is given between the
inference engine and the defuzzification block. The
basic structure of the IT2FLC system, which is
represented by Figure 2, is essentially composed of
three elements namely: the fuzzification interface, the
inference mechanism, and the output processing
module(El-Nagar et al. 2014).
Figure2: Structure described the IT2FLC.
Fuzzification: Unlike the type-1 membership
function, the type-2 membership function gives multiple
membership degrees (or dimensions) for each input.
Therefore, the uncertainty will be better represented.
Rule bases: The difference between type-1 and
type-2 lies only like the membership functions;
therefore, the structure of the rules in the case of type-
2 remains the same (Mendel et al. 2002).
Inference Mechanism: The inference system in
a type-2 fuzzy system uses the fuzzy rule base to
relate the input vector to the scalar output.
The type-reducer: is used to convert output sets
of type-2 fuzzy into sets of type-1 fuzzy to give finally
a crisp output (Lahlou et al. 2019). The type-reducer
takes into account more information about the
uncertainties of the rules than the defuzzified value (a
number). However, this operation requires intensive
calculations, except for interval type 2 where there is
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
218
a simple procedure for implementing type reduction.
The choice of (IT1FL) may not present the correct
and the optimal solution to all types of control
problems, while a possible alternative is to use
controllers based on type-2 fuzzy logic.
Defuzzification: The defuzzifier in a type-2
fuzzy system can then defuzzify the reduced set to
obtain an ordinary non-fuzzy output.
The variation in the wind and the change in the
operating point introduce some unpredictable values
into the information collected. All the uncertainties
are reflected at the level of the base of the fuzzy rules
by functions belonging to the premises and uncertain
consequences. We will illustrate how to use the
IT2FLC to minimize the effect of these uncertainties.
3.2 Proposed Interval Type-2 Fuzzy
Logic based on PID Controller
(IT2FL-PID)
The new proposed control used in this study is
obtained as:
𝑈
𝐾
𝑒
𝑡
𝐾
𝑒
𝑡
𝑑𝑡 𝐾
𝑑𝑒
𝑡
𝑑𝑡
(13)
With 𝐾
, 𝐾
, 𝐾
represent respectively the
corrected values of proportional, integral, and
derivative gains, which, are tuned by using the
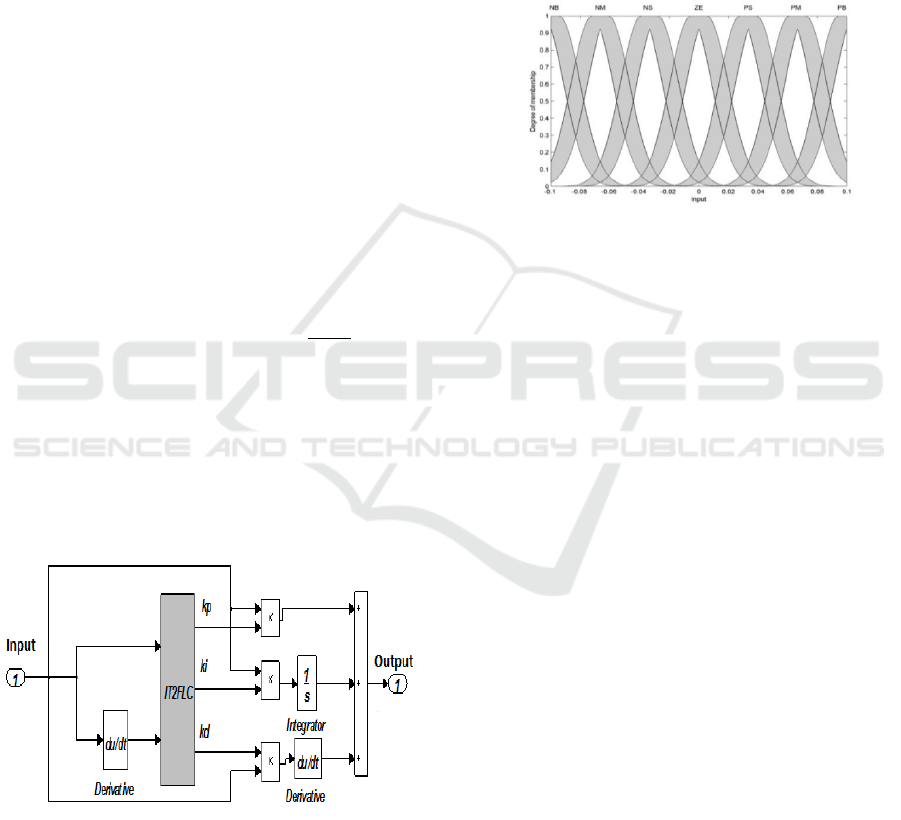
IT2FLC. We have Exposed the structure of the new
control law based on the IT2FLC-PID controller in
Figure 3.
Figure 3: Structure of IT2FL- PID controllers.
The type-2 interval fuzzy system (IT2FL) is designed
using the MATLAB / Toolbox (Castillo, 2007). The
type-2 Gaussian membership function is chosen for
the two inputs and the outputs. We have chosen seven
membership functions for each input and output.
These membership functions have different ranges in
the universe of discourse.
The interval of outputs gains KP, KI, KD of the two-
area are from:
𝐾
0,20
; 𝐾
0,60
; 𝐾
0,15
In this paper, Figure 4 describes the type-2
membership functions (MF). We have used the
symmetrical and Gaussian (MF).
Figure 4: Gaussian type-2 membership functions.
After the fuzzification of the input and output variables,
we proceed to the design of the inference engine. We have
designed 49 rule bases in the form of a matrix.
Finally, we can get the (IT2FLC-PID), our
proposed controller, which is presented by the
equations (14):
𝑢
𝑢
𝑢
(14)
4 SIMULATION RESULTS
This paper selects one type of the two-mass model of
the wind turbine. We have proposed to test Simulation
in MATLAB Software to validate the validity and the
robustness of the developed and suggested control
device (IT2FLC-PID). The parameters of the wind
turbine are taken from (Orlando et al. 2010).
Simulation Scenario 1: The wind speed profile
applied in the first scenario with more minor
variations. The result of the simulation is illustrated
in Figures:
Intelligent Variable Speed Wind Turbine Controller using the Type-2 Fuzzy Logic based on PID
219
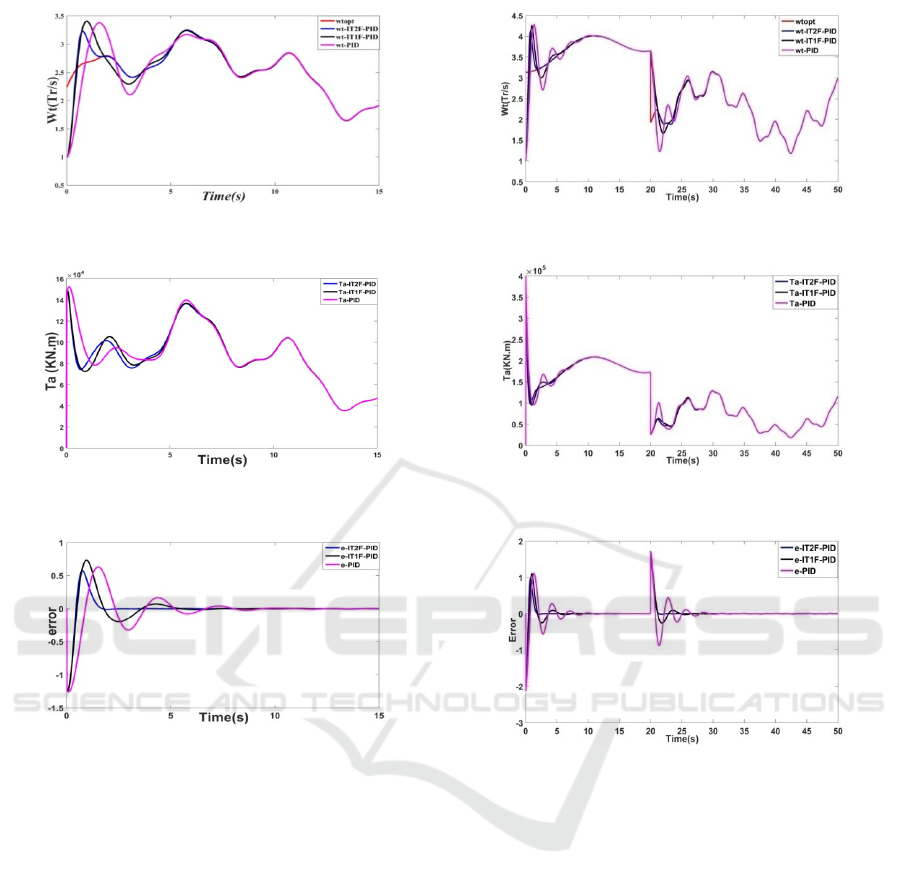
Figure 5: The Rotor Speed response.
Figure 6: The aerodynamic torque.
Figure 7: Comparison of tracking errors.
From this simulation results; it can therefore be
deduced from this case of simulation the efficiency
and the robustness of the proposed controller device
(IT2FLC-PID). The results confirm that this
intelligent controller is capable of eliminating the
oscillations and minimizing the tracking errors.
Comparing with the other controllers and intelligently
controlling the speed of the rotor of a wind turbine in
different wind profiles and offers a better result and
response time.
Simulation Scenario2: The wind speed profile used
in this scenario with high variation:
Figure 8: The Rotor Speed response.
Figure 9: The aerodynamic torque.
Figure 10: Comparison of tracking errors.
From all these results, we can deduce that all the
output response of (IT2FLC-PID) converges to de the
required values rapidly compared to other controllers
(IT1FLC-PID) and (PID). Consequently, the result of
the simulations shows that the suggested approach
makes it possible to minimize the response time with
good convergence despite the variations in wind
speed.
The proposed controller shows good performance in
terms of eliminating disturbances as well as in terms
of pursuing the desired rotational speed. We notice
that the proposed controller quickly converges to the
optimal state with less oscillation even when
changing the wind profile.
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
220

5 CONCLUSIONS
In this paper, the intelligent and optimal (IT2FLC-
PID) controller for a Variable Speed Wind Turbine
(VS-WT) System is introduced to ameliorate the
stability of the (WT) system. We have optimized the
gains of the (PID) controller by using the (IT2FLC)
approach to eliminate and overcome the significant
parametric variations, imprecision, and system
nonlinearities, this method strategy is used. We can
also show that the control device we have proposed
(IT2FLC-PID) in this work can ensure the good
performances of tracking which leads to the overall
stability of variable speed wind turbine systems in
various conditions of operating.
REFERENCES
Apata, O., Oyedokun, D.T.O.,2020. An overview of control
techniques for wind turbine systems, Scientific African
10.
Jabbari, H., Yoon, J., 2016. Power capture optimization of
variable-speed wind turbines using an output feedback
controller, Renewable Energy, vol 86, pp. 517-25.
Altab, H.,Ramesh,S., Imtiaz A. C., Abu, B., 2013. Energy-
efficient wind turbine system based on fuzzy control
approach, 5th BSME International Conference on
Thermal Engineering, Procedia Engineering 56, 637-
642.
Dib, F., Boumhidi, I., El Akchioui, N., Benaya, N.,
2019.Sliding Mode Control Optimized by Teaching
Learning-Based Optimization Algorithm for Variable
Speed Wind Turbine System, International Conference
on Wireless Technologies, Embedded and Intelligent
Systems (WITS), IEEE
Miccio, M., Cosenza, B., 2014.Control of a distillation
column by type-2 and type-1 fuzzy logic PID
controllers, Journal of Process Control 24:475−484.
Ben Meziane, K.,Naoual, R., Boumhidi, I., 2019.Type-2
Fuzzy Logic based on PID controller for AGC of Two-
Area with Three Source Power System including
Advanced TCSC. Second International Conference on
Intelligent Computing in Data Sciences, Procedia
Computer Science 148, 455–464.
Sid Ahmed, A., Mohamed, A., 2015. Fuzzy sliding mode
control applied to a doubly-fed induction generator for
wind turbines. Turkish Journal of Electrical
Engineering & Computer Sciences.
Hamed, J.A., Jungwon, Y., 2016.Power capture
optimization of variable-speed wind turbines using an
output feedback controller. Renewable Energy 86, pp:
517-525.
El-Nagar, A. M., El-Bardini, M., 2014. Practical
Implementation for the interval type-2 fuzzy PID
controller using a low-cost microcontroller. Ain Shams
Engineering Journal 5:475−487.
Castillo, O., Martinez, A.I., Martinez, A.C., 2007.
Evolutionary computing for topology optimization of
type-2 fuzzy systems. Adv, Soft Comput41: 63-75.
Mendel, J.M., John, R.I., Liu, FL., 2006. Interval type-2
fuzzy logic systems made simple.IEEETransFuzzySyst
14(6):808–821.
Orlando, S., Henrique, G., Antonio, M., Adriano, C., 2010.
Nonlinear control of the doubly-fed induction
generator in wind power systems. Renew Energy 35
(8):1662-1670.
Lahlou, Z., Ben Meziane, K.,Boumhidi, I., 2019. Sliding
mode controller based on type-2 fuzzy logic PID for a
variable speed wind turbine. International Journal of
System Assurance Engineering and Management.
Wang, L.,Isberg, J., and Tedeschi, J., 2018. Review of
control strategies for wave energy conversion systems
and their validation: the wave-to-wire
approach.Renewable and Sustainable Energy
ReviewsVolume 81, Part 1, pp. 366-379.
Koumir, M., El Bakri, A., and Boumhidi, I., 2017. Integral
sliding mode control based on extreme learning
machine for a wind turbine.Control. Intell. Syst. Vol
45(3).
El Aimani, S., Francois, B., Minne, F., Robyns, B.,
2003.Comparison analysis of control structures for
variable speed wind turbine. Proceedings of CESA,
July 2003.
Zadeh, L.A., 1965. Fuzzy sets, Information and Control,
vol. 8 No. 3 pp.338–353.
Mendel, J. M., Robert I. B, J., 2002. Type-2 Fuzzy Sets
Made Simple, IEEE Transaction on Fuzzy Systems, vol.
10, n°. 2, APRIL 2002.
Intelligent Variable Speed Wind Turbine Controller using the Type-2 Fuzzy Logic based on PID
221
