
Crash Prediction using Ensemble Methods
Mohammed Ameksa
1
, Hajar Mousannif
1
, Hassan Al Moatassime
2
and Zouhair Elamrani Abou
Elassad
1
1
LISI Laboratory, Computer Science Department, FSSM, Cadi Ayyad University, Marrakech, Morocco
2
OSER Research Team, Computer Science Department, FSTG, Cadi Ayyad University, Marrakech, Morocco
Keywords: Crash Prediction, Random Forest, Gradient Boosting Machine, Extreme Gradient Boosting, Road Safety
Modelling, Machine Learning
Abstract: The prediction of traffic accidents is a major concern worldwide due to its negative impact on all sectors. The
human and financial losses caused by road accidents have become increasingly important. This study aims to
investigate the prediction of an accident using several ensemble-based methods, including the GBM gradient
boosting machine, the XGB extreme gradient boosting, and RF random forest. To achieve this, we used driver’
inputs data extracted from the outputs of a driving simulator located at Cadi Ayyad University UCA. And the
evaluation of the developed models was carried out for both configurations, before and after tuning of
hyperparameters. Results show that the RF outperforms GBM and XGB for the default parameters with an
accuracy of 93%. However, after hyperparameters optimization, it had been noticed that even if the algorithms
are not the same, their performances are almost equal. The highest performance was performed after tuning
of hyperparameters.
1 INTRODUCTION
Road traffic crashes and related fatalities are a rapidly
increasing trend worldwide due to rapid growth in
demographics. According to (Lagarde E, 2020),
every year, more than 1 million people die in road
traffic crashes worldwide, and more than 50 million
are injured. Indeed, the human and financial losses
caused by road accidents are becoming more and
more important; consequently, a good prediction of
the occurrence of an accident before it happens is of
great benefit to humanity.
A significant effort has been made to reduce the
frequency and the occurrence of accidents on the
roadway. Based on the literature search, many studies
have been investigated factors that contribute to the
occurrence of accidents and analyzed crash
predictions (Silva et al., 2020). as well as the
potential of data mining techniques to predict the
occurrence of a crash has been evaluated in various
scientific studies using several algorithms. Indeed,
several studies found that Machine learning models
are more robust and powerful than statistical models
in predicting future events and have been used
successfully in many transportation systems.
(Abdelwahab and Abdel-Aty, 2001) built an
artificial neural network model for the prediction of
driver injury severity in traffic crashes using 1997
traffic accident data from the Central Florida region,
the MLP neural network was found to achieve the best
performance for training (65.6%) and testing (60.4%).
Other machine learning algorithms including, K
nearest neighbor (KNN), random forest (RF), support
vector machine (SVM), decision trees (DT), Gaussian
naive Bayes (Gaussian NB), and adaptive boost
(AdaBoost), are used by (Osman et al., 2019) to
predict near-crash based on observed in vehicle
kinematics data. This mentioned article proves that
the AdaBoost model achieved an excellent and
consistent performance while predicting near-crashes
(by accuracy of 100%) or everyday driving (by
accuracy of 98%). (Zouhair et al., 2020) used
Artificial Neural Networks (ANN) and Decision
Trees (DT) machine learning models to analyze crash
events and to outline the effect of both light and heavy
rain on road safety. Using driver inputs data as throttle
pedal position, brake pedal position, and wheel angle,
the author found that the ANN model offered a higher
precision with a value of 92.14%. In comparison, the
DT model showed an accuracy of 89.90%. Among the
limitations highlighted in the latter study was to take
advantage of the decision tree benefits by using the
ensemble methods.
Ameksa, M., Mousannif, H., Al Moatassime, H. and Elamrani Abou Elassad, Z.
Crash Prediction using Ensemble Methods.
DOI: 10.5220/0010731200003101
In Proceedings of the 2nd International Conference on Big Data, Modelling and Machine Learning (BML 2021), pages 211-215
ISBN: 978-989-758-559-3
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
211

From the literature mentioned above and other
studies, it is undoubtedly clear that the developed
models’ performances depend on the variety of data
mining algorithms and the dataset used and differ
from one study to another.
On the other hand, road accidents are a very
complex issue involving different dimensions of
driving, such as the driver, the vehicle, and
environmental dimension. (Aljanahi et al., 1999), In
an attempt to understand this human-machine
system, our team has performed an interpretation
framework integrating multiple dimensions
influencing the driver. Although driver inputs are
often thought to be a significant cause. (Treat et al.,
1979) indicated that approximately 90% of road
accidents were due to driving errors, demonstrating
the importance of the driver's inputs in the accident
occurrence process. Indeed, our previous study
(Ameksa et al., 2020) found that the vehicle data was
the primary focus of the researchers in terms of data
collection, including data provided by drivers such as
acceleration, braking, steering wheel.
Therefore, the purpose of this study is to
investigate and provide some insights into the power
of the supervised learning model, especially the
ensemble machine learning (ML) techniques, to
predict crashes using driver response features. It
should be noted that those features were used as
inputs so the model can predict the occurrence of a
collision based on the initial information provided
from a driving simulator database.
The rest of the paper is structured as follows:
Section 2 present the dataset and the methodology
used in model development. Section 3 highlights
significant findings and discussion. The final section
outlines the conclusions and presents the limitations
and recommendations for future studies.
2 DATA AND METHOD
2.1 Data Description
The fact that it is very dangerous to conduct trials in
a real road environment and knowing that a driving
experience on a simulator is an excellent tool for
collecting data in a safe environment. The database
used in this work is extracted from the outputs of a
driving simulator located at Cadi Ayyad University
UCA. Indeed, a group of volunteers participated in
an experimental study in which their driving data was
continuously recorded while they drove and followed
traffic rules as they usually do in real-life situations.
It
is worth noting that participants viewed the
1
Select random combinations to train the model
simulation on a 27-inch LCD screen with a resolution
of 1920x1080 pixels and heard through a surround
speaker system. The computer was equipped with a
Logitech® G27 Racing system.
For this study, we are interested in the driver’s
inputs data such as braking, steering wheel, and speed
being independent variables and the crash state as the
target variable. And regarding the size of the
database, it contains about 10500 rows.
2.2 Modelling
In this study, we used ensemble-based methods,
including the GBM gradient boosting machine
(Friedman, 2001), the XGB extreme gradient
boosting (Chen and Guestrin, 2016), and RF random
forest (BREIMAN, 2001) to address the aim of this
paper. The following should be highlighted, the three
algorithms used in this study are principally based on
two techniques, bagging, and boosting methods. The
RF algorithm is based on the first technique
(bagging), while the GBM and XGB algorithms are
built based on the second one (boosting). Both
bagging and boosting are ensemble methods, where
a collection of individual weak learners are combined
to produce a strong learner who performs better than
a single one. The difference between them is in the
training phase. For the bagging technique, each
model is built in parallel and independently, while
boosting improves the performance of the model by
adding new models that work well where previous
models have failed; it creates new learners
sequentially. The final decision is made for both
methods by averaging the N learners. However, it is
a Weighted Average for Boosting; and an Equal
Weighted Average for Bagging, with higher weights
for the better performing learners on the training data.
(Bari et al., 2020).
Concerning the methodology adopted in this
work includes the two significant steps:
1) The development of ensemble-based algorithms
was carried out using the default
hyperparameters. This first step was achieved
through the process described below for each
algorithm (example of RF algorithm, see the
Appendix ):
Import the libraries and the data file.
Defined Independent variables and the target.
Split the dataset into 70% for the training set
and 30% for the test.
Creating an instance of the model.
Evaluating the model using the test data.
2) The tuning of hyperparameters was performed
using the random search
1
(see Appendix) and grid
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
212
search
2
(see Appendix) technique for each
algorithm, and by setting up a grid of
hyperparameter values for the most powerful (the
Appendix illustrated the most powerful
hyperparameters for the RF algorithm). This
process helped us to obtain the optimum
hyperparameters, and subsequently, the best
model for each algorithm. This is the most
challenging part of the machine learning model-
building process.
To evaluate the performance of the crash
prediction model based on the test dataset, the
precision, recall, and F1 score (scikit-learn) are used
to measure the accuracy of the algorithms.
3 RESULTS AND DISCUSSION
Analysing the results of the three following
algorithms RF, GBM, and XGB (Figure 1) indicates
that the random forest provides better performance
than the other ensemble methods GBM and XGB for
the default configuration. To be more precise, 93%
was the accuracy of RF and 82% for both GBM and
XGB. Then, after hyper-parameters tuning, the
accuracy score of the three algorithms was found to
be similar and equals 95%.
The random search optimization method is used
to randomly select a combination of hyperparameters
among all ranges given at the beginning. In our case,
XGB was found to be the best model to predict
crashes using this method with an accuracy of 93%.
Figure 1: The accuracy of the three developed models
Since we are forecasting the occurrence of an
accident or not, our problem is a binary classification
case. And comparing the performance indicator has a
great benefit on the selection of algorithms.
Therefore, after the hyperparameters tuning process,
2
Train every combination of hyperparameter values on a
model, and select only the one with the highest score.
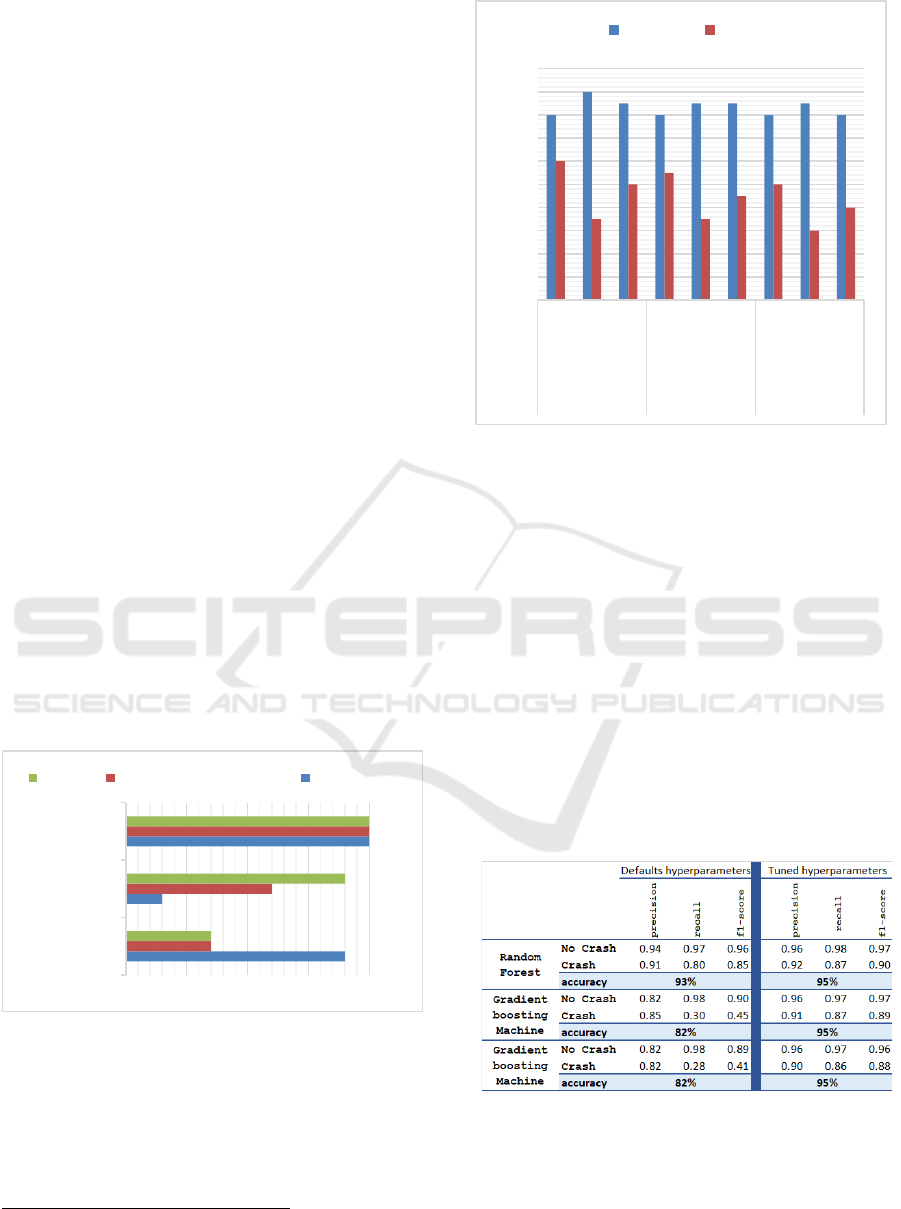
Figure 2: The performance indicators of RF, GBM and
XGB after hyperparameters tuning
the other performance benchmarks presented in
section 2.2 have been calculated, and the results are
illustrated in Figure 2.
The precision score of the developed models had
a slight difference between them in terms of accident
class (i.e., 0.90, 0.91, and 0.92 for XGB, GBM, and
RF, respectively). And for the no accident class, the
algorithms have the same precision. For the recall
score, we noticed that for both developed models
based on GBM and XGB had a similar score of 0.97
for the no-crash class, 0.87 and 0.86 were recorded
for GBM and XGB respectively regarding the crash
class, while the RF model proved to be the best with
a score of 0.98 for the no crash class and 0.87 for the
class with crashes (see Figure 3).
Figure 3: Entire results of 3 algorithms for both
configurations
75% 80% 85% 90% 95%
Default
RandomSearch
GridSearch
xGboost Gradienboostingmachine Randomforest
0,96
0,98
0,97
0,96
0,97 0,97
0,96
0,97
0,96
0,92
0,87
0,90
0,91
0,87
0,89
0,90
0,86
0,88
0,80
0,82
0,84
0,86
0,88
0,90
0,92
0,94
0,96
0,98
1,00
precision
recall
f1‐score
precision
recall
f1‐score
precision
recall
f1‐score
RF GBM xGboost
NoCrash Crash
Crash Prediction using Ensemble Methods
213

4 CONCLUSIONS
Crash prediction offers a proactive solution to
increase road safety and save lives. For this reason, it
has been a long-standing interest of researchers,
industry, and policymakers. However, crash
prediction remains complex and requires high
resolution and large data sets to develop powerful
models that effectively predict accidents. According
to the scientific literature, different approaches have
been used to address this topic. Although, as far as
the authors know, few works have been focused on
investigating crash prediction based on driver inputs
and ensemble methods.
In the present work, the performance of ensemble
methods machine learning algorithms has been
assessed in a classification case. in fact, the developed
models in this research consist of predicting the
occurrence of a crash from the simulator-based
dataset of some driver inputs as features.
Results show that the Random Forest outperforms
the gradient boosting machine and extreme gradient
boosting for the default parameters. But after the
optimization of hyperparameters, it was noticed that
even if the algorithms are not the same, their
performances are almost equal. Therefore, tuning
hyperparameters impacts the machine learning
developed model and offers the highest improvement
and benefit in accident prediction accuracy.
One of the limitations of this paper is that the
comparison is made only between ensemble
methods-based algorithms. Thus, future work should
include more algorithms, as well as integrating other
variables such as the vehicle kinematics and the
surrounding environment. In addition, the necessity
for having a large, and comprehensive training data
sets presents a clear challenge that should be
mitigated to ensure that machine learning
applications remain accurate.
ACKNOWLEDGEMENTS
The Moroccan Ministry of Equipment, Transport,
and Logistics; and the Moroccan National Centre for
Scientific and Technical Research (CNRST) are
gratefully acknowledged for their valuable support of
this research.
REFERENCES
Abdelwahab HT, Abdel-Aty MA. Development of
artificial neural network models to predict driver injury
severity in traffic accidents at signalized intersections.
Transp Res Rec 2001:6–13.
https://doi.org/10.3141/1746-02.
Aljanahi AAM, Rhodes AH, Metcalfe A V. Speed, speed
limits and road traffic accidents under free flow
conditions 1999;31:161–8.
Ameksa M, Mousannif H, Al Moatassime H, Elamrani
Abou Elassad Z. Toward Flexible Data Collection of
Driving Behaviour. ISPRS - Int Arch Photogramm
Remote Sens Spat Inf Sci 2020; XLIV-4/W3-2020:33–
43. https://doi.org/10.5194/isprs-archives-xliv-4-w3-
2020-33-2020.
Bari D, Ameksa M, Ouagabi A. A comparison of
datamining tools for geo-spatial estimation of visibility
from AROME-Morocco model outputs in regression
framework. Proc - 2020 IEEE Int Conf Moroccan
Geomatics, MORGEO 2020 2020.
https://doi.org/10.1109/Morgeo49228.2020.9121909.
BREIMAN L. Random forests. Random For 2001;45:5–
32. https://doi.org/10.1201/9780429469275-8.
Chen T, Guestrin C. XGBoost: A scalable tree boosting
system. Proc. ACM SIGKDD Int. Conf. Knowl.
Discov. Data Min., vol. 13-17- Augu, 2016, p. 785–94.
https://doi.org/10.1145/2939672.2939785.
Friedman JH. Greedy function approximation: A gradient
boosting machine. Ann Stat 2001;29:1189–232.
https://doi.org/10.1214/aos/1013203451.
Lagarde E. Road traffic injuries. Encycl Environ Heal
2020:572–80. https://doi.org/10.1016/B978-0-444-
63951-6.00623-9.
Osman OA, Hajij M, Bakhit PR, Ishak S. Prediction of
Near-Crashes from Observed Vehicle Kinematics
using Machine Learning. Transp Res Rec 2019.
https://doi.org/10.1177/0361198119862629.
scikit-learn. classification report n.d. https://scikit-
learn.org/stable/modules/generated/sklearn.metrics.cla
ssification_report.html.
Silva PB, Andrade M, Ferreira S. Machine learning applied
to road safety modeling: A systematic literature review.
J Traffic Transp Eng (English Ed 2020;7:775–90.
https://doi.org/10.1016/j.jtte.2020.07.004.
Treat JR, Tumba NS, McDonald ST, Shinar D, Hume RD,
Mayer RE, et al. Tri-Level Study of the Causes of
Traffic Accidents: An overview of final results. Proc
Am Assoc Automot Med Annu Conf 1979;21:391–
403.
Zouhair EAE, Mousannif H, Al Moatassime H. Towards
analyzing crash events for novice drivers under
reduced-visibility settings: A simulator study. ACM
Int. Conf. Proceeding Ser., 2020.
https://doi.org/10.1145/3386723.3387849.
Abdelwahab HT, Abdel-Aty MA. Development of
artificial neural network models to predict driver injury
severity in traffic accidents at signalized intersections.
Transp Res Rec 2001:6–13.
https://doi.org/10.3141/1746-02.
Aljanahi AAM, Rhodes AH, Metcalfe A V. Speed, speed
limits and road traffic accidents under free flow
conditions 1999;31:161–8.
Ameksa M, Mousannif H, Al Moatassime H, Elamrani
Abou Elassad Z. Toward Flexible Data Collection of
BML 2021 - INTERNATIONAL CONFERENCE ON BIG DATA, MODELLING AND MACHINE LEARNING (BML’21)
214

Driving Behaviour. ISPRS - Int Arch Photogramm
Remote Sens Spat Inf Sci 2020;XLIV-4/W3-2020:33–
43. https://doi.org/10.5194/isprs-archives-xliv-4-w3-
2020-33-2020.
Bari D, Ameksa M, Ouagabi A. A comparison of
datamining tools for geo-spatial estimation of visibility
from AROME-Morocco model outputs in regression
framework. Proc - 2020 IEEE Int Conf Moroccan
Geomatics, MORGEO 2020 2020.
https://doi.org/10.1109/Morgeo49228.2020.9121909.
BREIMAN L. Random forests. Random For 2001;45:5–
32. https://doi.org/10.1201/9780429469275-8.
Chen T, Guestrin C. XGBoost: A scalable tree boosting
system. Proc. ACM SIGKDD Int. Conf. Knowl.
Discov. Data Min., vol. 13-17- Augu, 2016, p. 785–94.
https://doi.org/10.1145/2939672.2939785.
Friedman JH. Greedy function approximation: A gradient
boosting machine. Ann Stat 2001;29:1189–232.
https://doi.org/10.1214/aos/1013203451.
Lagarde E. Road traffic injuries. Encycl Environ Heal
2020:572–80. https://doi.org/10.1016/B978-0-444-
63951-6.00623-9.
Osman OA, Hajij M, Bakhit PR, Ishak S. Prediction of
Near-Crashes from Observed Vehicle Kinematics
using Machine Learning. Transp Res Rec 2019.
https://doi.org/10.1177/0361198119862629.
scikit-learn. classification report n.d. https://scikit-
learn.org/stable/modules/generated/sklearn.metrics.cla
ssification_report.html.
Silva PB, Andrade M, Ferreira S. Machine learning applied
to road safety modeling: A systematic literature review.
J Traffic Transp Eng (English Ed 2020;7:775–90.
https://doi.org/10.1016/j.jtte.2020.07.004.
Treat JR, Tumba NS, McDonald ST, Shinar D, Hume RD,
Mayer RE, et al. Tri-Level Study of the Causes of
Traffic Accidents: An overview of final results. Proc
Am Assoc Automot Med Annu Conf 1979;21:391–
403.
Zouhair EAE, Mousannif H, Al Moatassime H. Towards
analyzing crash events for novice drivers under
reduced-visibility settings: A simulator study. ACM
Int. Conf. Proceeding Ser., 2020.
https://doi.org/10.1145/3386723.3387849.
APPENDIX
Crash Prediction using Ensemble Methods
215
