
Hierarchical Control of Swarms during Evacuation
Krist
´
yna Janovsk
´
a and Pavel Surynek
a
Faculty of Information Technology, Czech Technical University in Prague, Thakurova 9, 160 00 Praha 6, Czech Republic
Keywords:
Evacuation, Multi-agent Pathfinding, Hierarchical Control of Swarms, Conflict-based Search.
Abstract:
The problem of evacuation is addressed from the perspective of agent-based modeling (ABM) in this paper.
We study evacuation as a problem of navigation of multiple agents in a known environment. The environment
is divided into a danger and a safe zone while the task of agents is to move from the danger zone to the safe
one. Unlike previous approaches that model the environment as a discrete graph with agents placed in its
vertices our approach adopts various continuous aspects such as grid-based embedding of the environment
into 2D space continuous line of sight of an agent. In addition to this, we adopt hierarchical structure of
multi-agent system in which so called leading agents are more informed and are capable of performing multi-
agent pathfinding (MAPF) via centralized algorithms like conflict-based search (CBS) while so called follower
agents are modeled using simple local rules. Our experimental evaluation indicates that suggested modeling
approach can serve as a tool for studying the progress and the efficiency of the evacuation process.
1 INTRODUCTION
We address the problem of evacuation (Kurdi et al.,
2018) from the perspective of agent-based modeling
(ABM) (Wilensky and Rand, 2015; Zia and Ferscha,
2020) and multi-agent path finding (MAPF) (Silver,
2005; Ryan, 2007; Surynek, 2009; Standley, 2010).
The evacuation is understood as a navigation problem
for agents that need to relocate themselves from the
danger zone to the safe zone in a known environment.
Typically the environment is modeled as a discrete
graph where vertices represent locations and edges
define the topology and each agent has the full knowl-
edge of the graph. An agent can be located in a vertex
at a time and can instantaneously move across an edge
to a vertex in its neighborhood. Similar setup is used
in multi-agent path finding, a problem from which we
borrow the centralized algorithmic approach and en-
vironment modeling.
The basic characteristic of evacuation is that usu-
ally we do not care about the precise goal locations of
agents. Any location in the safe zone is acceptable as
a goal location for an agent. This is an important dif-
ference from MAPF where each agent has its specific
goal location. In addition to this, centralized control
of all agents is hardly reachable in practice hence we
need to assume that agents are controlled locally to a
significant extent. Individual agents in evacuation do
a
https://orcid.org/0000-0001-7200-0542
not share the knowledge of locations of other agents.
This precludes direct application of MAPF algorithms
in solving evacuation problems at the level of individ-
ual agents. On the other hand, fine-grained behaviour
of individual agents can be captured using the ABM
approach.
Previous works often model the evacuation prob-
lem as a network flow (Chalmet et al., 1982; Even
et al., 2014; Arbib et al., 2018) in a discrete graph.
Such approaches however model the problem at a
too coarse level where for example interactions (colli-
sions) between individual agents in a limited space are
not modeled nor the individual behaviour of agents.
Hence these approaches are rather suitable for evacu-
ation modeling at the level of cities and road networks
(Kamiyama et al., 2006). More detailed modeling
of agents in required for evacuation inside buildings
where ABM techniques are more suitable (Liu et al.,
2016; Liu et al., 2018; Zafar et al., 2016).
On the other hand, ABM models often lack cen-
tralized aspect which often results in insufficient per-
formance of the evacuation process (Trivedi and Rao,
2018).
1.1 Contribution and Organization
We attempt in this work to integrate centralized plan-
ning from MAPF and an ABM-based framework for
modeling detailed agents’ behaviour.
Janovská, K. and Surynek, P.
Hierarchical Control of Swarms during Evacuation.
DOI: 10.5220/0010678200003064
In Proceedings of the 13th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2021) - Volume 2: KEOD, pages 61-73
ISBN: 978-989-758-533-3; ISSN: 2184-3228
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
61

Agent behaviour in our approach uses a hierar-
chical model in which some usually more informed
agents follow the evacuation plan constructed by the
centralized algorithm. Conflict-based search (Sharon
et al., 2014), an optimal MAPF algorithm, is used in
our case. We call these more informed agents lead-
ers. We can assume, that the leader agents can be
equipped with some electronic device that informs
them about the plan and the current situation.
Less informed agents are called followers in our
hierarchical model and they are controlled locally us-
ing various rule-based methods. These agents are
assumed to follow the leader agents using the local
rules.
At the level of environment modeling, our ap-
proach is a synthesis between discrete graph-based
models and continuous models from which we bor-
row continuous reasoning about the topology of the
environment. Namely, the environment is modeled as
a grid embedded in the 2D space where agents are
placed in the cells of the grid. Agent themselves have
a volume and when using local rules they consider
continuous line of sight to localize a leader agent.
We demonstrate that our hierarchical ABM ap-
proach for evacuation can serve as a tool for study-
ing the progress and the efficiency of the evacuation
process.
The paper is organized as follows: we first intro-
duce formal definition of discrete evacuation and ba-
sic concepts from related MAPF. Then our novel hi-
erarchical agent-based model of evacuation is intro-
duced. Various models of behaviour of agents are de-
scribed. Finally, we analyze performance of the evac-
uation model in diverse scenarios empirically.
2 BACKGROUND
Evacuation is an anonymized form of the multi-agent
path finding (MAPF) problem. It takes place in an
undirected graph G = (V, E), where each vertex is
marked either as safe or endangered, that is V = S ∪D,
where S are safe vertices and D are endangered ver-
tices. The goal vertex of an agent is not just one ver-
tex, but any vertex from a set of safe vertices.
The task of is to find a set of paths for a set of
agents A = {a
1
, a
2
, ..., a
k
} that navigates them from
endangered vertices D to safe vertices S. Each agent
from A starts in its own vertex, so that no more than
one agent is present in a vertex at a given time. The
solution of this problem is a plan π = [c
0
, c
1
, ..., c
m
],
c
m
(a) ∈ S ∀a ∈ A and c
t
: A → V is the configuration
of agents in vertices at time t.
The following definition summarizes the evacua-
tion problem as introduced in (Selvek. and Surynek.,
2019).
Definition 1. Discrete multi-agent evacuation
(MAE) is a 5-tuple E = [G = (V, E), A, c
0
, D, S], where
G represents the environment, A is a set of agents,
c
0
: A → V is the initial configuration of agents, D and
S such that D ⊆ V , S ⊆ V , V = D ∪ S with D ∩ S 6=
/
0,
and |S| ≥ k represent a set of endangered and a set of
safe vertices respectively.
We usually try to minimize the evacuation time,
the total number of steps from the beginning of the
evacuation until the moment when the last agent
reaches a safe vertex. We call this value the
makespan.
In our model, the leader agents have access to cen-
tralized plan obtained by MAPF planning algorithm.
Specifically we use the Conflict-Based Search (CBS)
algorithm, a makespan optimal MAPF algorithm. It is
an algorithm, in which for each agent the shortest path
is found from the starting position to the target posi-
tion so that it does not collide with other agents during
the course, that is, no two agents are in the same loca-
tion at the same time. The algorithm is makespan op-
timal considering assuming a solution exists (Sharon
et al., 2014) (existence of solution can be checked by
a different algorithm, however in environment with
enough free space a solution always exists).
The algorithm consists of two levels - at the higher
level, as shown in Algorithm 1, the construction of a
conflict tree takes place, where individual nodes con-
tain a set of conflicts for given agents. A conflict is
determined by a pair of agents, a vertex, and a time
step where the conflict occurred. The conflict tree
then branches to two nodes - one for each agent in
the conflict with a constraint forbidding the agent to
enter the conflict. In the new nodes, a path-finding
algorithm is run for the given agent based on the con-
straint arising from the conflict, determining the new
path for this agent, but without the given conflict.
At the lower level, there is a local path-finding
algorithm for each agent - in this paper A* (Hart
et al., 1968) algorithm is used. The selected path-
finding algorithm works with the limitations given by
the higher level of CBS.
The lower level sends the best solution for a given
agent to the higher level, which evaluates past con-
flicts (collisions) based on those solutions and con-
structs a conflict tree.
The algorithm is guaranteed to find the makespan
optimal solutions. For details see (Sharon et al.,
2014).
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
62
Algorithm 1: Higher level of CBS (Sharon et al., 2014).
Input: MAPF instance
1 R.constraints =
/
0;
2 R.solution = set of individual agent paths;
3 R.make ← compute makespan(R.solution);
4 OPEN ← R;
5 while OPEN not empty do
6 P ← lowest makespan node(OPEN);
7 OPEN ← OPEN \ {P};
8 f irst con f lict ← validate(P);
9 if first conflict =
/
0 then
10 return P.solution;
11 for agent
i
in first conflict do
12 N ← new node;
13 N.constraints ← P.constraints ∪
new constraint(agent
i
, vertex, time);
14 N.solution ← P.solution;
15 N.solution.update(new constraint());
16 N.make ← compute makespan(N);
17 Insert N to OPEN;
3 MODEL DESIGN
In this section we describe our hierarchical agent
model and individual agent types. We also discuss
the design of the environment and the combination of
discrete and continuous approach.
3.1 Agents
Agents are divided into two types. The motivation for
this decision is the evacuation situation in the school
environment. Thus, agents can represent teachers and
students. We therefore divide them into leaders and
followers. Leaders search for a way out of the build-
ing, and followers form swarms around leaders, fol-
low them, and evacuate with their help. We assume
that leaders have the full knowledge and can be con-
trolled centrally in the principle while the followers
can only get information from their neighborhood and
are controlled locally.
3.1.1 Follower
The follower must be able to observe the leader in
its immediate neighborhood if no obstacle prevents it
from doing so. If there are more leaders, it is able
to decide which one is closer. It follows either the
nearest leader or an assigned leader. If it loses the
sight of its leader, it tries to get to the last position
where the leader was when the follower still saw it.
Algorithm 2: Agent function of a follower.
Input: MAPF instance, list of leaders’
positions
1 f ollower.leader ← choose nearest(leaders);
2 if distance(follower, leader) <
follower.sight length or not
follower sees leader() then
3 return random free neighbour ;
4 if not follower.obeys() then
5 return move(follower, leader, away)
6 else
7 return move(follower, leader,
towards)
In the base design, the follower is designed as a
purely reflex agent (Russell and Norvig, 2010). That
was decided because following the example of evacu-
ation in the school environment, follower should fol-
low orders of an authority - in our case the leader.
Thus, the follower does not try to evacuate itself, it
only has to find a leader who will lead it to the exit.
It has an overview only of its immediate surroundings
in its field of view. If it sees a leader in its proxim-
ity and decides to be obedient and follow it, it moves
to a free cell that is closer to the leader. Otherwise,
follower tries to move away from the leader. If the
agent does not find a leader in its vicinity, it moves to
a random neighbouring free cell or remains in place.
Each model uses a specific version of agent func-
tion shown in Algorithm 2, adapted to the needs of
individual models.
3.1.2 Leader
The goal of a leader is to find the shortest way out of
the dangerous area while keeping a certain distance
between itself and other leaders. Each leader has a
swarm of followers around itself, which it leads to the
nearest exit. After each step, leaders must respond to
changes in the environment, whether they are obsta-
cles or other leaders. If the leader is prevented from
moving by followers, it is able to move them from
their positions so that it can perform the next step. A
leader is designed as an agent with a goal and an en-
vironment model. (Russell and Norvig, 2010) It has
a constant overview of the map. It searches for the
shortest path to the nearest exit on the map, to which
it leads his followers.
A leader in the lower level of the Conflict-Based
Search searches for its own path regardless of other
leaders. For this A* (Hart et al., 1968) algorithm
is used, which is modified so that the agent respects
the restrictions set by the CBS. When determining
the conflict between two leaders, we cannot rely only
Hierarchical Control of Swarms during Evacuation
63
on specific coordinates, but on the area around both
agents, which is defined by their parameter of conflict
distance, which is a distance the agents need to keep
between them.
Conflict is defined as a quintuplet (a
1
, a
2
, con f lict
position o f a
1
, con f lict position o f a
2
, t). The con-
flict involves two different positions, one for each
agent. It was chosen in this way because a conflict
can occur for agents even if they are not standing next
to each other. It is enough for one of the agents to
get into the area too close to the other agent, but for
each of them there will be a different coordinate by
which they would get into this area. Therefore, each
leader has a different coordinate restriction. This con-
flict search is implemented in the validate function as
shown in Algorithm 3.
Algorithm 3: Validate.
Input: Node N
1 conflicts =
/
0;
2 for i ∈ {1, 2, ..., len(N.solution)} do
3 for j ∈ {i + 1, i + 2, ..., len(N.solution)} do
4 steps ← min(len(solution[i],
len(solution[j]));
5 for t ∈ {1, ..., steps} do
6 geometry ←
compute geometry(solution[i],
solution[ j], N.state);
7 if geometry.in sight(a
i
, a
j
, t) then
8 conflicts ← conflicts ∪ {(i, j,
solution[i][t], solution[j][t],
t)};
9 return conflicts;
In the validate function, positions of each pair of
leaders are compared at each step of their paths. If
two leaders come too close to each other and there
is no obstacle between them, they have a conflict in
that particular steps. Further conflicts between those
agents are not searched, as their paths will change
when the first conflict is removed.
3.2 Environment
The environment where the evacuation takes place is
expressed by means of a discrete grid map which is
embedded in 2D space so continuous geometric rea-
soning can be made in the environment. The agents
are expressed as circles with a fixed radius chosen on
the basis of preliminary experiments. To make the
distribution of agents in the environment more real-
istic, each agent is placed randomly within its square
cell.
a
a
a
a
a
a
a
1
2
3
4
5
6
7
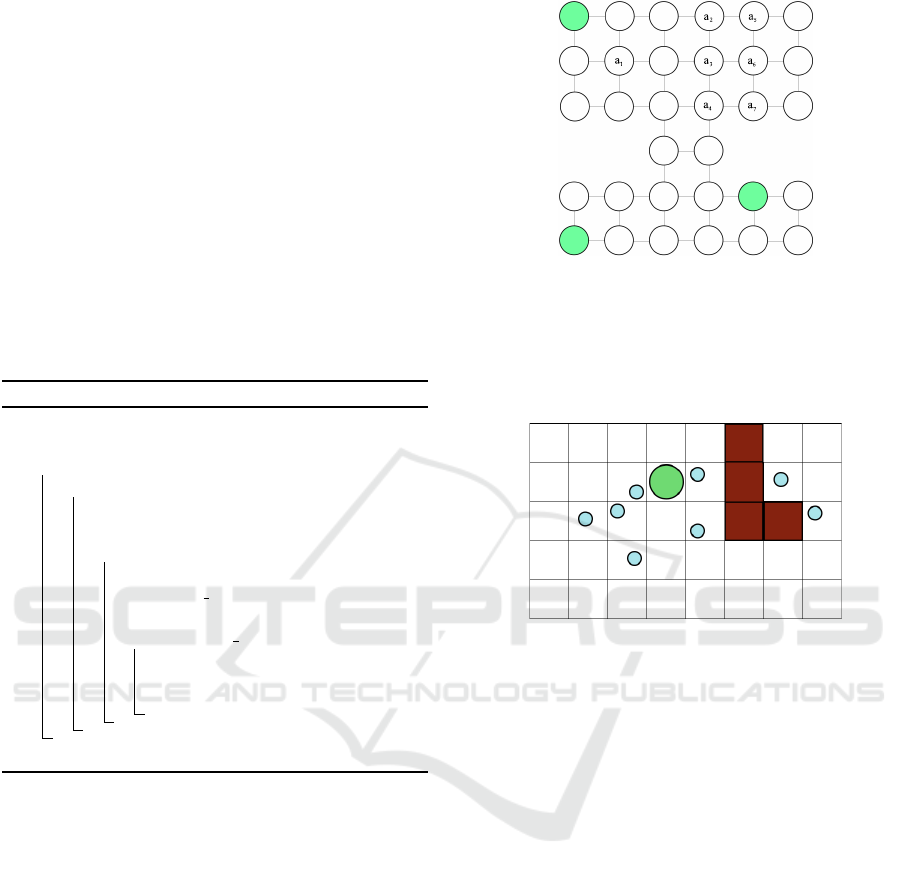
Figure 1: Discrete representation of the environment.
Figure 1 depicts the discrete representation of the
environment. Vertices marked a
1
...a
7
are vertices oc-
cupied by an agent, green vertices represents exits and
white vertices are free vertices.
Figure 2: Continuous representation of the environment.
In figure 2 we show continuous representation of
the environment, blue dots represent followers, green
dot represents a leader and red squares represent
walls.
3.2.1 Geometry of the Environment
The follower can only follow a leader if it sees it.
We use simulation of line of sight as follows. The
follower F sees the leader L if the distance of the
agents given by the Euclidean distance is less than the
value of the field of view parameter of the follower
and at the same time there is no obstacle between the
agents, which may be a wall or another follower. If
the line given by the agents’ centers intersects another
follower or wall, the agent does not see the leader.
For leaders, the only possible obstacles are walls,
which are expressed as squares occupying the entire
area of one cell.
4 MODELS OF BEHAVIOR
Using multi-agent modeling, we examine the evacu-
ation process and determine which of the following
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
64
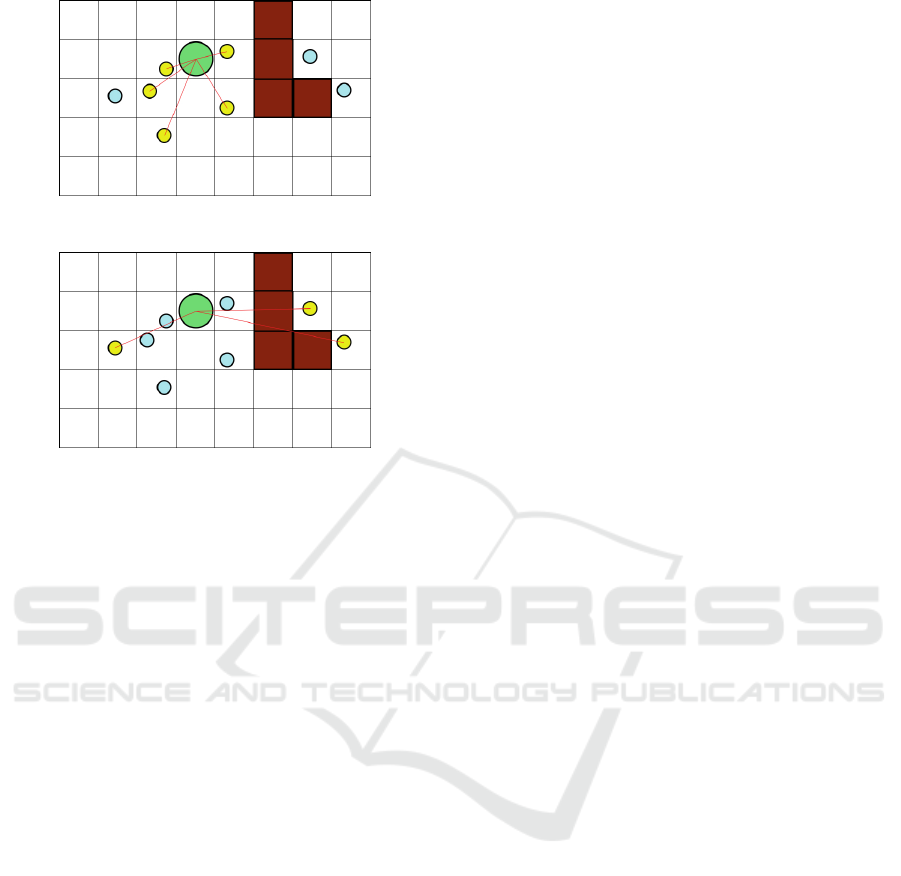
Figure 3: Followers depicted yellow see the leader.
Figure 4: Followers depicted yellow don’t see the leader.
evacuation models is the best. Individual models dif-
fer in the behavior of both leaders and followers. Al-
though all models work with hierarchical swarming,
the methods of maintaining and guiding these swarms
differ in what behavioral rules are used.
4.0.1 Model A: Simple Following
In this model, followers always choose the nearest
leader in sight to follow. In the basic design of this
model, after separation from leaders, followers do not
attempt to evacuate themselves on their own. Leaders
only try to get to the safe area without conflicts and as
quickly as possible, but they do not have an assigned
swarm of followers and therefore do not check if any
agents have separated along the way. This can lead to
significant losses of followers in individual swarms.
4.0.2 Model B: Assigned Swarms
To prevent significant losses of followers, each fol-
lower has exactly one leader assigned to it, which
it must follow all throughout the evacuation. At the
same time, in the basic design of the model, followers
never try to evacuate on their own. Leaders look after
their respective swarms, regularly checking to see if
any agents have separated from the swarm, and if the
number of lost agents rises above a given acceptable
limit, the leader stops and waits for a certain number
of steps to allow lost agents to rejoin the swarm.
Thus, during the CBS, the leader sends only its
current location to the algorithm as its path and does
not plan a complete path to the exit, as it is not clear
how long it will wait on the spot. It is however possi-
ble that due to the inability to move, it will get into a
conflict with another leader.
However, there is an even greater need for effec-
tive planning of individual steps, as the evacuation
time increases compared to model A due to frequent
stops and waiting. Experiments have shown that the
fewer followers a leader can afford to lose, the slower
its evacuation will be.
Partially Informed Followers. If the initial posi-
tion of a purely reflex follower is unfavorable (no
leader is in sight and the position is not near the exit),
or it loses its leader, it is likely that its evacuation
will fail. Therefore, it is appropriate to put in place a
mechanism to increase the follower’s chances of sur-
vival.
Followers are unaware of the ongoing evacuation
and therefore do not attempt to reach the exit on their
own. However, it is possible to leave them k ran-
dom steps, after which they will start trying to get to
an exit, which however may not necessarily be the
nearest exit available. They do not take into account
any dynamically emerging barriers that other agents
present, because unlike leaders they do not cooper-
ate and have no way to obtain information about the
position of other agents.
Because these are only followers, they plan their
path using an algorithm simpler than A* used by lead-
ers.
The moment the desired leader appears in the field
of view of the follower after a number of steps, the
follower becomes a part of the swarm of this leader
and no longer searches for a path to the exit.
We have therefore introduced a modification of all
models, which allows followers outside of swarms to
perform planned movement. If a leader (in Model A
any leader, in Model B one specific leader) no longer
appears in their field of view after 30 time steps, they
can get the opportunity to evacuate themselves. They
use the Breadth-First Search algorithm (BFS) to find
their path to the exit. A value of 30 was chosen based
on preliminary experiments. We assume that agents
have the knowledge of the environment (not the posi-
tions of other agents) hence individual pathfinding in
the environment can be regarded as a local behaviour.
4.0.3 Model C: Plane
The motivation for this model is evacuation in an air-
plane or on a ship. The leaders do not try to evacuate
themselves first, but let followers be evacuated before
them and leave the space last. As in model B, at the
beginning of the evacuation, leaders divide the indi-
Hierarchical Control of Swarms during Evacuation
65

vidual followers into groups that do not change dur-
ing the evacuation. The leader thus keeps track of
whether his assigned swarm has already been evacu-
ated and, if so, only then does it leave the area itself.
Thus, at each step, the leader first determines the
direction in which it is best to move. It then communi-
cates this information to its followers, and they move
in response to this instruction. Leader itself moves
last.
Followers recognize three basic types of their lo-
cation - they can be located in an aisle, on a seat,
or near an exit. Based on this, they perform specific
movements.
• Aisle - in this case, the follower moves in the di-
rection specified by its leader. In this case, the
follower primarily moves to the right / left, but
if a wall, seat or a leader prevents it from mov-
ing, it has the option to bypass him. Followers in
this model are also partially informed, so if they
do not see their leader for a given period of time,
they try to evacuate themselves through one of the
exits, which, however, may not be the nearest exit
for them.
• Seat - a seat is a narrow space surrounded on at
least two sides by rows of seats. If a follower is in
a seat, it tries to move to an aisle.
• Near the exit - if a follower is located near the exit,
it stops listening to the instructions of the leader
and moves directly to the exit.
5 EXPERIMENTAL EVALUATION
In this section we will discuss modifications per-
formed to improve the course of experiments and
evacuations themselves. Then we will discuss se-
lected experiments.
5.1 Experimental Setup
5.1.1 Constraining the Depth of the Conflict
Tree
The implementation of the model uses a variant of
the CBS algorithm that constructs only the first n ver-
tices of the conflict tree, because non-constrained tree
created by the algorithm can have thousands of ver-
tices, which leads to a very long computation time
and would make the model impractical for real-life
applications. In the experiments, CBS was greatly
constrained to save computational time. This could
also have contributed to creation of conflicts and con-
gestions during the evacuation. This approach may
not return a makespan optimal result, it is only sub-
optimal. However, since the map space is very large,
we don’t have to worry that the algorithm won’t find
a solution.
However, if that happens, the agent who did not
find a solution will not move. When replanning oc-
curs in the next step, a position where an agent pre-
viously had a conflict with another agent may already
be unblocked and the agent may continue on its route.
After each agent performs a step, replanning oc-
curs - the CBS algorithm is therefore run repeatedly.
This makes it possible to respond to emerging obsta-
cles on the map, which might be other leading agents.
5.1.2 Processing of the Resulting Vertex
The original CBS algorithm returns a conflict-free
vertex. However, since a modification limiting the
depth of the search was made, in many cases the ver-
tex identified as the best solution contained conflicts.
CBS resolves those conflicts that it encounters first.
However, it may not get to all the conflicts that are to
take place in the next step. Therefore, for the resulting
solution, the set of all coming conflicts is found again,
and on the basis of this, the solution is replanned for
each agent with a conflict. The final result is this mod-
ified solution.
5.2 Selected Experiments
The most important experiments we carried out stud-
ied impact of numbers of evacuated agents, follower
obedience, level of communication between leaders
on makespan and other parameters. We will discuss
these experiments in this section.
All selected experiments on models A and B were
carried out on map building, whereas selected exper-
iment on model C used map plane.
Figure 5: Map building.
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
66
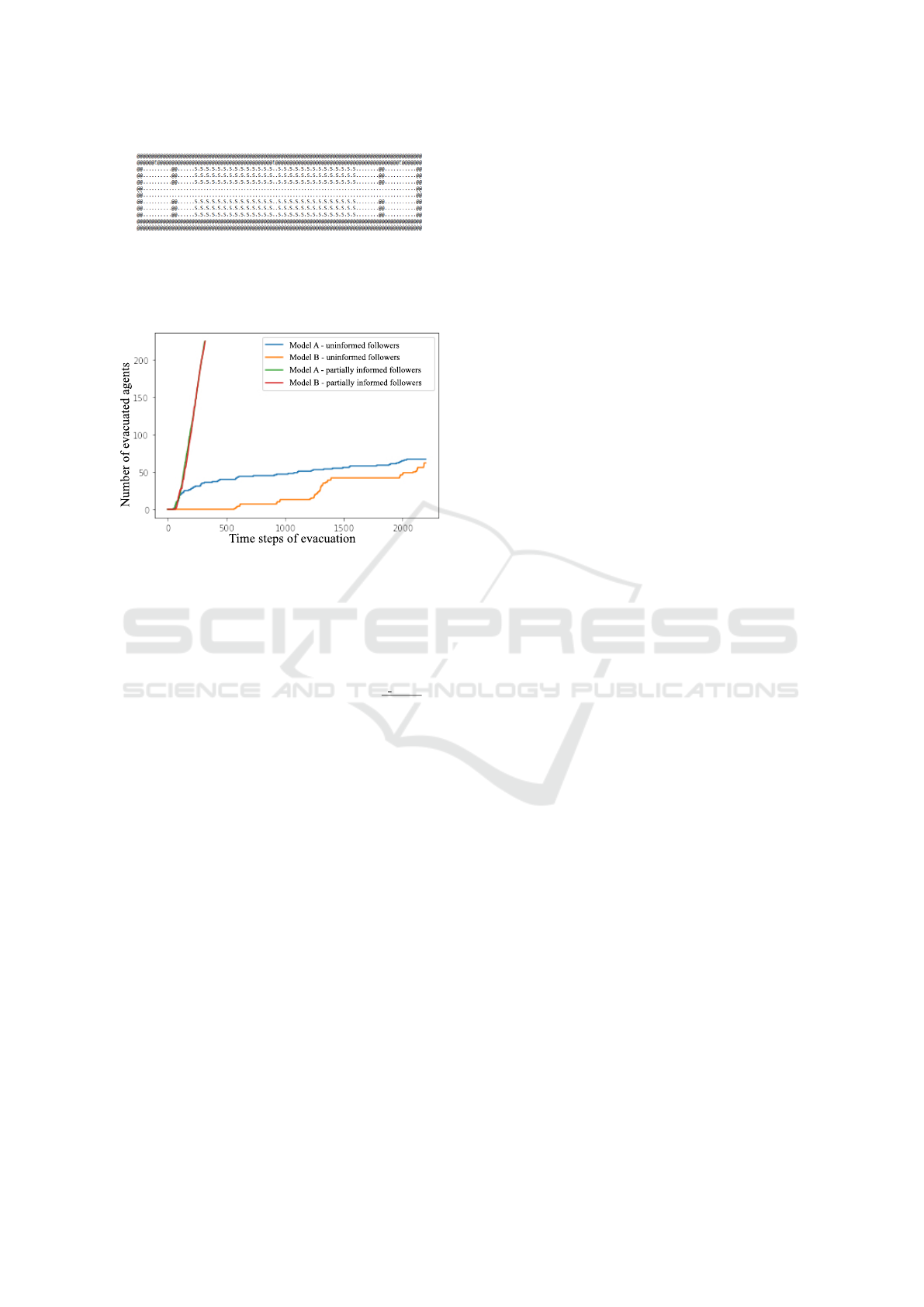
Figure 6: Map plane.
5.2.1 Comparison between Models a, B and
Usage of Partially Informed Followers
Number of evacuated agents
Model A - uninformed followers
Time steps of evacuation
Model B - uninformed followers
Model A - partially informed followers
Model B - partially informed followers
Figure 7: Progress of evacuation depending on the model
being used and the usage of partially informed followers.
Comparison of Models a and B using Partially In-
formed Followers. Figure 7 shows that the evacua-
tion process is very similar in both models, with small
deviations in favor of model A.
In model B, swarms consist of at least d
n agents
3
e+
1 agents, while in model A a leader often breaks away
from its followers and evacuates alone, so in model A,
the first agents begin to evacuate themselves earlier
than in Model B. These are the solitary leaders.
Thus, in model B, unlike model A, a larger num-
ber of agents typically arrive at the exit at once. This
is reflected in the plot where places with faster and
slower growth alternate in this model, while in places
with faster growth model B catches up with the num-
bers of evacuated agents in model A, where the evac-
uation after the first 130 steps is almost linear.
We can determine that the most important part of
the evacuation is, for example, the first half of the
evacuation - typically the sooner the agents are evac-
uated, the better, because there is never an infinite
amount of time for the evacuation (Ng and Chow,
2006).
In the first part of the experiment, the numbers
of evacuated agents in model A slightly outweighed
model B. However, Model B quickly catches up with
occasional shortcomings, and variations in evacuated
agent numbers are minimal for the remainder of the
experiment. In terms of speed, the evacuation time is
the same for both models. According to the first met-
ric, model A could be considered more successful. In
terms of the rate of evacuation, the models are equal.
However, the realism of these models must also be
taken into account. We consider model B to be more
realistic.
Comparison of Models a and B using Uninformed
Followers. Figure 7 shows that model A leads in
the number of evacuated agents throughout the whole
evacuation process. In model B, there are large de-
lays in the evacuation process. Whole parts of swarms
always evacuate at once, which is reflected in the
plot by significant jumps in the number of evacuated
agents.
Because the swarms in Model A are much more
scattered, due to the behavior of leaders, there are no
places where no agents would be evacuated for a long
time - in the order of units up to tens of steps. How-
ever, after all the agents who were part of a swarm
have been evacuated, in both models any additional
abandoned agents may evacuate themselves only after
approaching the exit by a sequence of random steps.
Comparison of Models based on Usage of Par-
tially Informed Followers. Models using partially
informed followers have a visible advantage over
models working with uninformed followers, both in
terms of evacuation rate and in terms of the number
of evacuees. Model A with uninformed followers be-
gins to visibly lose to models with partially informed
followers after about 100 steps, when the growth in
the number of evacuated agents begins to slow down
to almost a complete halt.
It is unlikely that models with uninformed follow-
ers can undergo a complete evacuation because un-
informed followers do not actively try to evacuate on
their own.
5.2.2 Impact of Number of Evacuated Agents on
Makespan
We observed the development of the makespan -
the evacuation time - depending on the number of
agents. In models A and B, there are always 9 lead-
ers, while the number of followers is 1–216. The ob-
served values always differ by 10 agents. In model
C, 165 agents are evacuated, out of which 3 are lead-
ing agents. In all models, followers are partially in-
formed.
Model B. Outliers in figure 8 are caused by con-
gestions in experiments. Congestion that would pro-
long the average evacuation time occurred with both
Hierarchical Control of Swarms during Evacuation
67
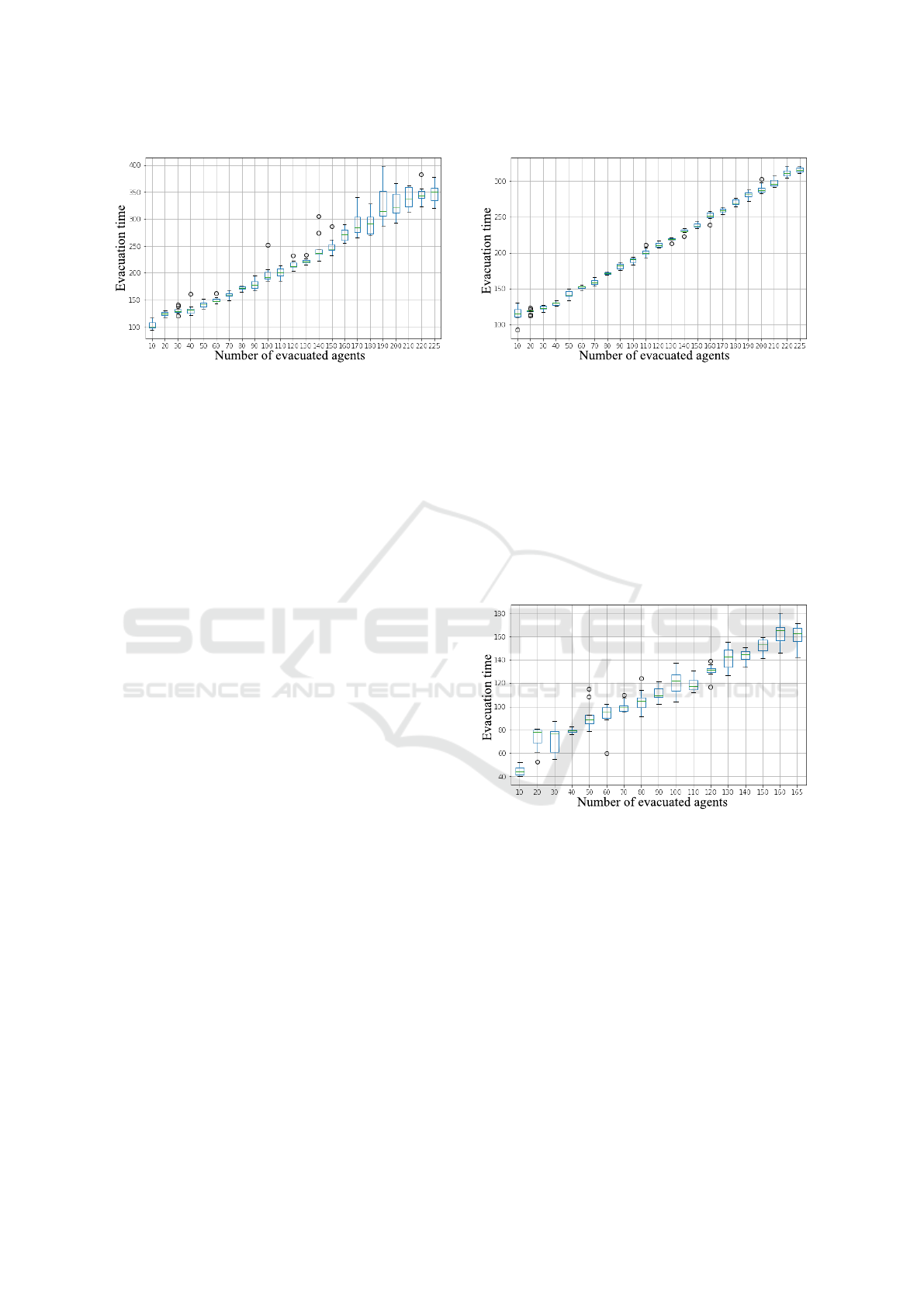
Number of evacuated agents
Evacuation time
Figure 8: Evacuation time as a function of the number
of evacuated agents and the map used in the experiment -
model B.
a lower number of agents (eg 40 agents) and a higher
number (eg 220 agents). However, such cases most
often occurred in the range of 100-225 agents.
The value of the average evacuation time increases
with the increasing number of agents, but the variabil-
ity of these values also increases. With a higher num-
ber of agents, congestion is more common because
several swarms can enter narrow corridors at once and
block each other’s path. Leaders also have to wait
for more followers, which again seems problematic
if the escape route of agents from narrow spaces is
blocked by other swarms or followers from the same
swarm, who are currently waiting for the movement
of a standing leader. This phenomenon is partially
eliminated with a lower number of followers, as there
are not so many agents in the corridors at once, and
they do not block each other’s path. However, it is not
possible to expect the complete elimination of a cer-
tain deviation in evacuation times, because followers
can significantly prolong the evacuation time by their
disobedient behavior.
Due to the problems observed starting with 100
evacuated agents, we can state that the map used be-
comes dangerous for the number of agents of 100 or
more.
Model A. Figure 9 shows that the evacuation time
increases with the number of evacuated agents. How-
ever, unlike in Model B, congestions do not occur,
and with the vast majority of agents, evacuation time
variations are in the order of units only.
In contrast to model B, several differences are no-
table – there are no congestions, nor does the variabil-
ity of evacuation times increase with the increasing
number of evacuees. This is due to the behavior of
leaders, who throughout the evacuation only proceed
smoothly to the exit and do not stop to wait for any
followers. As a result, there are no accumulations of
Number of evacuated agents
Evacuation time
Figure 9: The evacuation time as a function of the number
of evacuated agents and the map used in the experiment -
model A.
swarms in one place, and therefore no congestions.
The average evacuation times in this model are
lower than in model B, except in the case of only
10 agents, that is 9 leaders and one follower. In this
case, leader waiting for his respective follower helped
the evacuation in model B, as the follower had a bet-
ter chance of catching up with his leader and did not
have to wait for his own path planning to begin, which
could have happened in model A.
Number of evacuated agents
Evacuation time
Figure 10: The evacuation time as a function of the number
of evacuated agents and the map used in the experiment -
model C.
Model C. As the number of evacuated agents in-
creases, so does the evacuation time. However, be-
tween lower and higher numbers of agents, deviations
of the evacuation time occur in matter of tens of steps.
In contrast to models A and B, a higher variance
of values between the individual numbers of agents
occurs in most of the values examined. This may be
due to the nature of the environment, in which there
are only narrow alleys that support congestions.
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
68
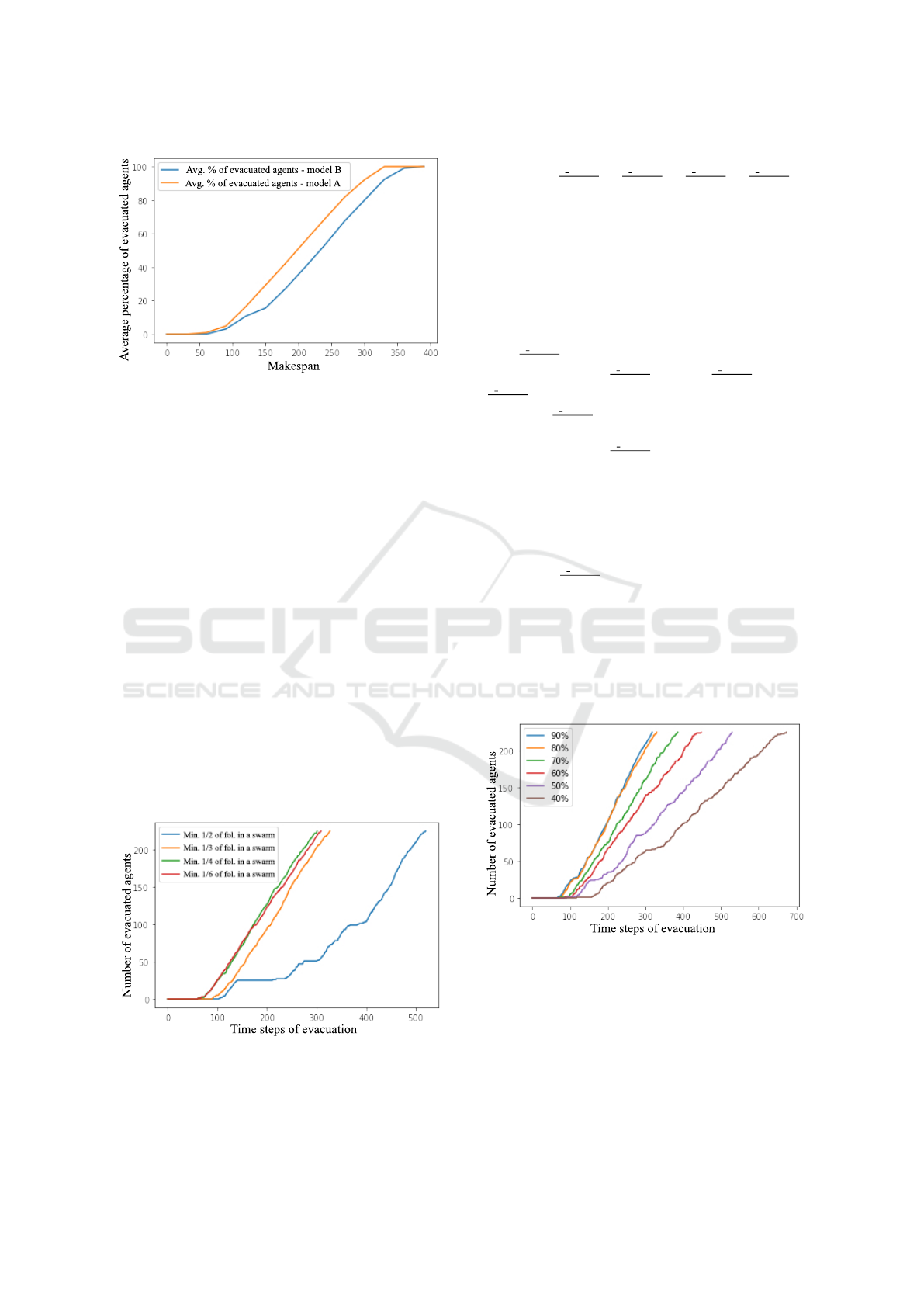
Avg. % of evacuated agents - model B
Avg. % of evacuated agents - model A
Makespan
Average percentage of evacuated agents
Figure 11: Average percentage of evacuated agents depend-
ing on makespan.
5.2.3 Impact of Makespan on Average
Percentage of Evacuated Agents
We observed what percentage of evacuees have been
evacuated, if we constrain the makespan at a certain
number of time steps. We can also choose a percent-
age of successfully evacuated agents after which the
evacuation is deemed successfull. We can also deter-
mine what is the minimal time an evacuation needs to
take in order to evacuate enough agents.
We can see model A surpassing model B in aver-
age percentage of evacuated agents. 10 measurements
were taken for each observed value. Observed values
were 0-390 time steps, noted every 30 steps. If we
deem for example 80% as a sufficient percentage of
successfully evacuated agents, evacuation in model
A would need around 270 time steps to achieve this
number. Evacuation in model B would need to take
about 300 steps to evacuate at least 80% of agents.
5.2.4 Impact of Minimal Swarm Size
Time steps of evacuation
Number of evacuated agents
Figure 12: Progress of evacuation as a function of the η
parameter.
We introduce the minimal swarm size
η ∈ {d
n agents
2
e, d
n agents
3
e, d
n agents
4
e, d
n agents
6
e},
which represents a minimal number of followers a
leader has to keep in a swarm to be able to freely
move towards an exit. If the swarm size falls below
this limit, the leader has to wait for a set amount of
time or until the swarm size rises above the set limit
again. This experiment was carried out on model B
with partially informed followers.
It can be seen in figure 13 that although there
is a noticeable difference in the evacuation rate of
η = d
n agents
2
e compared to other cases, the evacu-
ation rate of η = d
n agents
3
e, η = d
n agents
4
e a η =
d
n agents
6
e is very similar throughout the evacuation,
with η = d
n agents
3
e lagging slightly behind the two
fastest cases. At the same time, it can be noted that
in the case of η = d
n agents
2
e there was a congestion
during the evacuation, which increased the final time
of evacuation of this case.
Figure 13 shows that there is a limit to the min-
imum swarm size below which the evacuation rate
no longer differs much. For the performed exper-
iments, the results of the evacuation are very simi-
lar for η ≤ d
n agents
4
e, throughout the evacuation pro-
cess. For higher values of η, the rate of evacuation
increased, which was also caused by the congestion,
but a slower course of evacuation compared to other
cases can be noted in the part of the evacuation pre-
ceding this complication.
5.2.5 Impact of Follower Obedience
Time steps of evacuation
Number of evacuated agents
Figure 13: Progress of evacuation as a function of the β
parameter.
In this experiment we observed the follower obedi-
ence parameter β ∈ {90%, 80%, 70%, 60%, 50%,
40%}, which is the probability that a follower will
decide to follow its leader at a given step and will not
try to break away from the swarm. This experiment
was carried out on model B with partially informed
followers.
Hierarchical Control of Swarms during Evacuation
69
As β decreases, the evacuation time increases by
hundreds of time steps. Followers with lower β more
often do not follow the steps of their leaders, thus hin-
dering evacuation. With a lower β, as a result of their
disobedience, followers more often break away from
their swarm and deliberately move away from it. As
a result, they will lose sight of their leaders, and un-
til they begin to evacuate on their own, they will drop
behind significantly. This leads to increasing evacua-
tion time with decreasing β. Lower β can also lead to
an increased incidence of congestions.
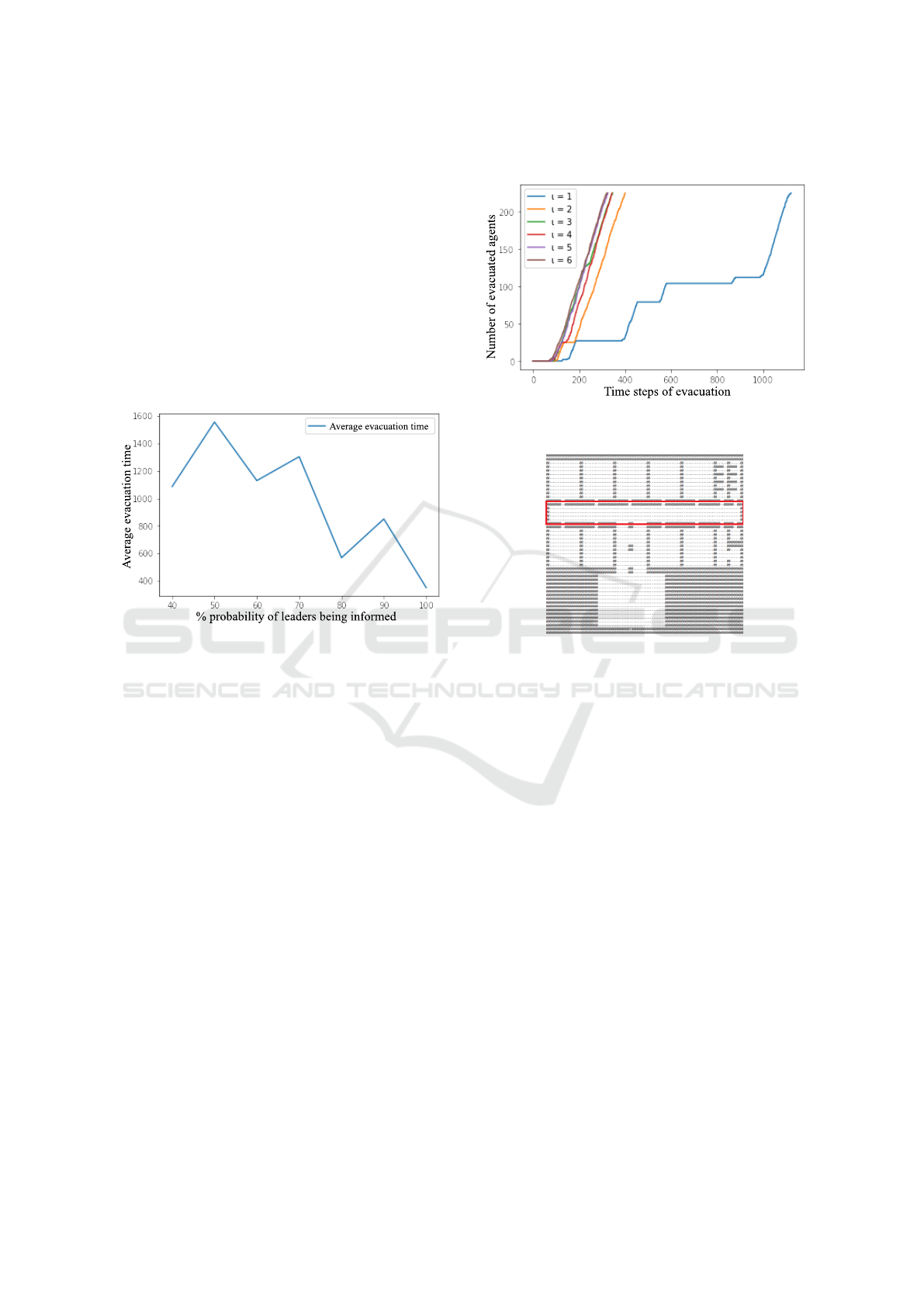
5.2.6 Impact of Communication Level between
Leaders on Makespan
Average evacuation time
% probability of leaders being informed
Average evacuation time
Figure 14: The average evacuation time as a function of the
α parameter.
Here we observed the parameter α ∈ {100%, 90%,
80%, 70%, 60%, 50%, 40%}, the percentage proba-
bility of leaders being informed, therefore participat-
ing in the CBS. This experiment was carried out on
model B with partially informed followers.
Unlike followers, if a leader is informed is de-
cided only once, before the start of path planning.
Thus, the same leaders always participate in the CBS.
6 experiments were performed for each value of α.
As the value of α decreased, there were more
and more conflicts, often multiple, which greatly pro-
longed evacuation times, as the emergence of these
conflicts caused congestions, which lasted hundreds
of time steps in a conflict of three or more swarms.
The average α = 90% that exceeds α = 80% or α =
70% that exceeds α = 60% indicates that even a lower
number of uninformed agents can cause significant
problems .
Thus, this experiment showed the advantage of
Conflict-Based Search – α = 100% has a noticeable
advantage over lower values, and although conges-
tions can occur even at this value, their occurrence is
more rare. It is therefore important that leaders com-
municate with each other and try to avoid conflicts.
5.2.7 Impact of Corridor Width
Time steps of evacuation
Number of evacuated agents
Figure 15: Progress of evacuation as a function the ι param-
eter.
Figure 16: Used map building with highlighted corridor
whose width has been tested.
We observed how the course of evacuation will de-
velop depending on the width of escape routes ι ∈ {1,
2, 3, 4, 5, 6} , ie corridors in which the largest oc-
currence of congestions occurred in previous experi-
ments. This experiment was carried out on model B
with partially informed followers.
Figure 15 shows the slowest evacuation process
was at ι = 1. ι = 2 lags behind by several tens of
steps. The pairs ι = 3, ι = 4 and ι = 5, ι = 6 reached
a comparable evacuation time. As the value of ι de-
creases, the evacuation time increases. It can be seen
that the biggest problems are caused by ι = 1, so this
setting is inappropriate. We chose ι ≥ 3 as an appro-
priate setting for this parameter.
5.2.8 Summary of Results
Experiments have shown the importance of coordi-
nated agent behavior. Conflict-Based Search has
proven to be an effective tool for constructing plans
for informed leader agents which in combination with
swarms of the follower agents that do not communi-
cate with each other resulted in an efficient evacuation
algorithm for large groups of agents.
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
70

Another observation is that it is also important to
maintain order inside the swarm, which affects the
evacuation of the swarm as a whole. It is therefore
necessary for followers to listen to their leaders.
Furthermore, the number of evacuees has been
shown to affect evacuation time not only because
more agents need to be evacuated, but also because
more agents lead to a higher risk of congestions, as
the space is easier to fill, which may prevent individ-
ual swarms from evacuating.
Experiments also show that in order to evacuate
as quickly as possible, it is important that the leaders
take into account followers who may be behind them
and wait for them. However, if followers are lost and
cannot rejoin the swarm, they should try to evacuate
themselves.
6 RELATED WORK
This work follows (Selvek. and Surynek., 2019),
which also deals with simulation of evacuation in
buildings using a multi-agent system. The authors
propose a local algorithm for LC-MAE evacuation
planning, which is based on sub-optimal algorithms
for MAPF. The paper also studies how the course of
evacuation affects the presence of uninformed agents,
those who plan by themselves in isolation, among in-
formed agents, that plan centrally.
In (Mas et al., 2015) authors simulate evacuation
using ABM focusing on the evacuation of cities dur-
ing the tsunami. The authors present the benefits of
simulating evacuations during a tsunami using ABM.
They also mention the obstacles that realistic mod-
eling of human behavior poses for successful ABM
simulation. Apart from the evacuation simulation, the
model proposed by the authors is used to estimate the
number of victims, analyze the behavior of evacuees,
reveal the limits of the use of shelters or evaluate the
use of means of transport.
Evacuation during a natural disaster is also dis-
cussed in (Tsurushima, 2021), in which the author
bases his model on a video
1
of an actual evacua-
tion during the 2011 T
¯
ohoku earthquake. Based on
the video, the behavior of agents, which is also repro-
duced as a group behavior, is divided into fleeing and
falling to the ground depending on a distance from the
exit. The author performs simulations in the environ-
ment and settings that correspond to the video.
In (Galea et al., 2003), the authors describe the
rules for the evacuation of an aircraft and propose the
airEXODUS evacuation model, which is a modifica-
1
https://www.youtube.com/watch?v=tejlDDKeg8s
tion of the EXODUS software tool, which is used to
simulate the evacuation of a large number of people
from complex environments. According to the au-
thors, this model is able to predict with high accuracy
the results of certification tests of an aircraft, but also
to predict the sequence of events that may occur dur-
ing these tests.
In (Chen et al., 2020) authors deal with the issue
of hierarchical swarm management. They apply this
technique to swarms of autonomous drones, in which
the hierarchy of leader and follower aircraft applies.
The authors deal with the problem of controlling the
formation of drones. They propose solutions using
group hierarchical swarm control, which achieve co-
ordination outside and inside individual groups of
aircrafts. The architecture proposed by the authors
reduces the complexity of coordinated planning, as
there is no need to plan routes for all aircraft in in-
dividual swarms. The authors also propose rules for
the control of the formation for the pilot aircraft and
the follower aircraft in each group, which guarantee
the stability of the entire swarm, even with possible
restrictions.
The evacuation and behavior of children in the
school environment, which is also the motivation of
this work, is discussed in (Chen et al., 2018). Based
on experiments on groups of children, the authors
reveal several typical behaviors related to distance,
obstacles or clogging of space. They also examine
group behavior scenarios, which they further com-
pare with the behavior of individuals. They reveal
problems during a group evacuation, where children
stop and play during the evacuation, or wait for their
friends instead of their own evacuation. They also
point to the fact that group behavior has an effect on
the child’s path choice. However, the observations did
not take place during the crisis and the children were
not helped or influenced by teachers’ behavior.
It is important to note that evacuation modeling in-
cludes as diverse approaches as fluid-dynamic models
that regard the evacuation as fully continuous process
solved via differential equations (Sikora et al., 2011).
Cellular automata represent another popular tool for
studying evacuation (Bazior et al., 2018). Often fine
grained modeling of interactions between individual
agents such as resolving collisions between agents is
studies through the concept of cellular automaton.
7 CONCLUSION
Many studies focus on modelling evacuation using
only local algorithms. We have decided to pro-
pose a combination of more informed centralized ap-
Hierarchical Control of Swarms during Evacuation
71

proaches with local approaches to multi-agent evac-
uation in a hierarchical model via ABM techniques.
The designed models can be used in testing efficiency
of evacuation plans, building safety, and evacuation
progress depending on various parameters.
In our model, agents were divided into two types
- leaders, who controlled their swarms and guided
the swarm to a safe area using a modified global
Conflict-Based Search algorithm, a popular algorithm
for multi-agent path finding, and followers, who aim
to follow the leaders to the safe zone.
We compared different models of behavior of both
types of agents and experimentally verified their im-
pact on the progress of evacuation. The results of our
work pointed out the importance of communication
between leaders in this type of evacuation. Imple-
menting partially centralized approach has increased
the efficiency of the evacuation over scenarios using
only local approach, where leaders didn’t communi-
cate. We also showed how mistakes or disobedience
of the follower agents affect the progress of evacu-
ation and we identified the problems that can occur
during evacuation.
In future work, we plan to expand the experi-
ments and propose further modifications of our pro-
posed model, so that the idea of hierarchical control of
swarms during evacuation could be tested in a wider
range of situations. We also plan to verify how real-
istic our models are. For this we plan to acquire data
from evacuations that are unfortunately rare and diffi-
cult to obtain. Another option is to perform tests using
volunteers.
ACKNOWLEDGEMENT
This work has been supported by GA
ˇ
CR - the Czech
Science Foundation under the grant registration num-
ber 19-17966S, and by the V
´
yLet 2021 project spon-
sored by the Faculty of Information Technology,
Czech Technical University in Prague.
REFERENCES
Arbib, C., Muccini, H., and Moghaddam, M. T. (2018). Ap-
plying a network flow model to quick and safe evacu-
ation of people from a building: a real case. In Pro-
ceedings of the GEOSAFE Workshop on Robust So-
lutions for Fire Fighting, RSFF 2018, L’Aquila, Italy,
July 19-20, 2018., pages 50–61.
Bazior, G., Palka, D., and Was, J. (2018). Cellular au-
tomata based modeling of competitive evacuation. In
Cellular Automata - 13th International Conference on
Cellular Automata for Research and Industry, ACRI
2018, Como, Italy, September 17-21, 2018, Proceed-
ings, volume 11115 of Lecture Notes in Computer Sci-
ence, pages 451–459. Springer.
Chalmet, L. G., Francis, R. L., and Saunders, P. B. (1982).
Network models for building evacuation. Fire Tech-
nology, 18(1):90–113.
Chen, H., Wang, X., Shen, L., and Cong, Y. (2020). Forma-
tion flight of fixed-wing uav swarms: A group-based
hierarchical approach. Chinese Journal of Aeronau-
tics.
Chen, L., Tang, T.-Q., Song, Z., Huang, H.-J., and Guo,
R.-Y. (2018). Child behavior during evacuation under
non-emergency situations: Experimental and simula-
tion results.
Even, C., Pillac, V., and Hentenryck, P. V. (2014). NICTA
evacuation planner: Actionable evacuation plans with
contraflows. In ECAI 2014 - 21st European Con-
ference on Artificial Intelligence, 18-22 August 2014,
Prague, Czech Republic - Including Prestigious Ap-
plications of Intelligent Systems (PAIS 2014), volume
263 of Frontiers in Artificial Intelligence and Applica-
tions, pages 1143–1148. IOS Press.
Galea, E., Blake, S., Lawrence, P., and Gwynne, S. (2003).
The airexodus evacuation model and its application to
aircraft safety.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE Transactions on Systems Science and
Cybernetics, SSC-4(2):100–107.
Kamiyama, N., Katoh, N., and Takizawa, A. (2006). An ef-
ficient algorithm for evacuation problem in dynamic
network flows with uniform arc capacity. IEICE
Trans. Inf. Syst., 89-D(8):2372–2379.
Kurdi, H. A., Al-Megren, S., Althunyan, R., and Almulifi,
A. (2018). Effect of exit placement on evacuation
plans. European Journal of Operational Research,
269(2):749–759.
Liu, C., li Mao, Z., and min Fu, Z. (2016). Emergency evac-
uation model and algorithm in the building with sev-
eral exits. Procedia Engineering, 135:12 – 18. 2015
International Conference on Performance-based Fire
and Fire Protection Engineering (ICPFFPE 2015).
Liu, H., Xu, B., Lu, D., and Zhang, G. (2018). A path plan-
ning approach for crowd evacuation in buildings based
on improved artificial bee colony algorithm. Applied
Soft Computing, 68:360 – 376.
Mas, E., Koshimura, S., Imamura, F., Suppasri, A., Muhari,
A., and Adriano, B. (2015). Recent advances in agent-
based tsunami evacuation simulations: Case studies in
indonesia, thailand, japan and peru.
Ng, C. and Chow, W. (2006). A brief review on the time
line concept in evacuation.
Russell, S. and Norvig, P. (2010). Artificial Intelligence: A
Modern Approach. Prentice Hall, 3 edition.
Ryan, M. R. K. (2007). Graph decomposition for efficient
multi-robot path planning. In IJCAI 2007, Proceed-
ings of the 20th International Joint Conference on Ar-
tificial Intelligence, Hyderabad, India, January 6-12,
2007, pages 2003–2008.
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
72

Selvek., R. and Surynek., P. (2019). Engineering smart be-
havior in evacuation planning using local cooperative
path finding algorithms and agent-based simulations.
In Proceedings of the 11th International Joint Confer-
ence on Knowledge Discovery, Knowledge Engineer-
ing and Knowledge Management - Volume 2: KEOD,,
pages 137–143. INSTICC, SciTePress.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2014). Conflict-based search for optimal multi-agent
pathfinding.
Sikora, W., Malinowski, J., and Kupczak, A. (2011). Model
of skyscraper evacuation with the use of space sym-
metry and fluid dynamic approximation. In Paral-
lel Processing and Applied Mathematics - 9th In-
ternational Conference, PPAM 2011, Torun, Poland,
September 11-14, 2011. Revised Selected Papers, Part
II, volume 7204 of Lecture Notes in Computer Sci-
ence, pages 570–577. Springer.
Silver, D. (2005). Cooperative pathfinding. In Proceedings
of the First Artificial Intelligence and Interactive Digi-
tal Entertainment Conference, June 1-5, 2005, Marina
del Rey, California, USA, pages 117–122.
Standley, T. S. (2010). Finding optimal solutions to cooper-
ative pathfinding problems. In Fox, M. and Poole, D.,
editors, Proceedings of the Twenty-Fourth AAAI Con-
ference on Artificial Intelligence, AAAI 2010, Atlanta,
Georgia, USA, July 11-15, 2010. AAAI Press.
Surynek, P. (2009). A novel approach to path planning
for multiple robots in bi-connected graphs. In 2009
IEEE International Conference on Robotics and Au-
tomation, ICRA 2009, Kobe, Japan, May 12-17, 2009,
pages 3613–3619. IEEE.
Trivedi, A. and Rao, S. (2018). Agent-based modeling of
emergency evacuations considering human panic be-
havior. IEEE Trans. Comput. Soc. Syst., 5(1):277–
288.
Tsurushima, A. (2021). Reproducing evacuation behav-
iors of evacuees during the great east japan earth-
quake using the evacuation decision model with real-
istic settings. In Rocha, A. P., Steels, L., and van den
Herik, H. J., editors, Proceedings of the 13th Inter-
national Conference on Agents and Artificial Intelli-
gence, ICAART 2021, Volume 1, Online Streaming,
February 4-6, 2021, pages 17–27. SCITEPRESS.
Wilensky, U. and Rand, W. (2015). An Introduction to
Agent-Based Modeling: Modeling Natural, Social,
and Engineered Complex Systems with NetLogo. The
MIT Press.
Zafar, M., Zia, K., Muhammad, A., and Ferscha, A.
(2016). An agent-based model of crowd evacuation
integrating agent perception and proximity pressure.
In Proceedings of the 14th International Conference
on Advances in Mobile Computing and Multi Me-
dia, MoMM 2016, Singapore, November 28-30, 2016,
pages 12–19. ACM.
Zia, K. and Ferscha, A. (2020). An agent-based model of
crowd evacuation: Combining individual, social and
technological aspects. In Proceedings of the 2019
ACM SIGSIM Conference on Principles of Advanced
Discrete Simulation, SIGSIM-PADS 2020, Miami, FL,
USA, June 15-17, 2020, pages 129–140. ACM.
Hierarchical Control of Swarms during Evacuation
73
