
Object Detection with TensorFlow on Hardware with Limited
Resources for Low-power IoT Devices
Jurij Kuzmic and Günter Rudolph
Department of Computer Science, TU Dortmund University, Otto-Hahn-Str. 14, Dortmund, Germany
Keywords: Object Detection, Convolutional Neural Network (ConvNet), Autonomous Driving, Simulator in Unity 3D,
Sim-to-Real Transfer, Training Data Generation, Computational Intelligence, Computer Vision, TensorFlow.
Abstract: This paper presents several models for individual object detection with TensorFlow in a 2D image with
Convolution Neural Networks (ConvNet). Here, we focus on an approach for hardware with limited resources
in the field of the Internet of Things (IoT). Additionally, our selected models are trained and evaluated using
image data from a Unity 3D simulator as well as real data from model making area. In the beginning, related
work of this paper is discussed. As well known, a large amount of annotated training data for supervised
learning of ConvNet is required. These annotated training data are automatically generated with the Unity 3D
environment. The procedure for generating annotated training data is also presented in this paper.
Furthermore, the different object detection models are compared to find a better and faster system for object
detection on hardware with limited resources for low-power IoT devices. Through the experiments described
in this paper the comparison of the run time of the trained models is presented. Also, a transfer learning
approach in object detection is carried out in this paper. Finally, future research and work in this area are
discussed.
1 INTRODUCTION
In the autonomous vehicle industry, vehicles can
drive autonomously without a driver. To do this, these
vehicles have to recognise the lane or determine and
classify the objects in the environment. The safety of
the occupants is at the top of the list. For this reason,
the topic of computer vision has become very popular
in recent years. Object detection requires usually
hardware with high computational power, such as a
graphics processing unit (GPU), because image
processing is a highly intensive computing procedure.
Additionally, object recognition is processed using
Convolutional Neural Networks (ConvNets). These
are known for the successful processing of 2D
images. Furthermore, the ConvNets have been proven
to be effective in object detection including contour
finding. In this paper, we focus on an object detection
for hardware with limited resources for low-power
IoT devices. For this purpose, we have trained and
evaluated different models of object detection with
TensorFlow. The idea is to find a suitable system for
model cars with non-high-computing hardware
without a GPU. However, object recognition with
limited resources is not only interesting in the field of
model making. Additionally, this detection of objects
can be useful in other areas. For example, consider
postal drones that place the package in the garden or
smart surveillance cameras for agriculture which
notify when certain objects e.g. animal species are
detected. Object detection is not new and has been
researched in the vehicle industry for some time. For
example, Tesla has already recognition of
pedestrians, bicycles, or other vehicles since 2014
(Wikipedia, 2021). The problem in academic research
is that these algorithms and procedures, which are
already established in the autonomous vehicles
industry, are kept under lock and key and are not
freely accessible. For this reason, own algorithms and
procedures have to be researched and developed in
the academic field.
The goal of our work is to switch from the
simulation we developed before (Kuzmic and
Rudolph, 2020) to the real model cars. In case of a
successful transfer of simulation to reality (sim-to-
real transfer), the model car behaves exactly as before
in the simulation. For this purpose, the model cars
have to recognise the lane from a 2D image (Kuzmic
and Rudolph, 2021) and determine and classify the
objects on this lane.
302
Kuzmic, J. and Rudolph, G.
Object Detection with TensorFlow on Hardware with Limited Resources for Low-power IoT Devices.
DOI: 10.5220/0010653500003063
In Proceedings of the 13th International Joint Conference on Computational Intelligence (IJCCI 2021), pages 302-309
ISBN: 978-989-758-534-0; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2 RELATED WORK
Numerous scientific papers are dealing with object
detection, e.g. (Fink, Liu, Engstle, Schneider, 2018)
who have made a deep learning-based multi-scale
multi-object detection and classification for
autonomous driving or (Zaghari, Fathy, Jameii,
Shahverdy, 2021) who have developed the
improvement in obstacle detection in autonomous
vehicles using YOLO non-maximum suppression
fuzzy algorithm. Some scientific works introduce a
shape detection framework for detecting objects in
cluttered images (Zhu, Wang, Wu, Shi, 2008).
Another approach for object recognition is to
distinguish the objects by 3D information. For this
purpose, LiDAR sensors (Beltrán et al., 2018) or the
stereo camera can be used. This camera contains two
cameras at a certain distance, similar to human eyes.
This delivers two images. These both images can be
used to determine the depth of the image to
distinguish between roads, humans, cars, houses, etc.
(Li, Chen, Shen, 2019). Also, some related scientific
papers present the sim-to-real transfer (Tan et al.,
2018) or (Kahn, Abbeel, Levine, 2020). Our approach
is to develop further systems and procedures for
object detection for hardware with limited resources
in a real environment, e.g. in the field of model
making or in the farm and forest business.
3 DATA SET
Before training of the ConvNets, annotated training
data have to be obtained for each specific use case.
This training data is the basis for a successful object
detection. Table 1 shows the data sets we have created
for our object detection.
Table 1: Our data sets for object detection with TensorFlow.
The resolution of the images is 1280x720 (width x height)
pixel. Count stands for the number of records.
No. Name Classes Class labels Count
1 Sim 1 1 SimCar 300
2 Sim 2 2 SimCar,
SimAnimal
1000
3 Mod 1 1 PiCar 111
4 Mod 2 4
PiCar, ModCar,
ModAnimal,
ModPerson
200
Some small pre-tests have shown: it is sufficient to
take pictures of the object in a 360° view. The colour
of the objects does not matter in object detection. The
objects are distinguished by their different shapes.
Data sets 1 and 2 were created and automatically
annotated with our simulator. Data set 1 contains a
simulation car SimCar with various objects. Here,
only the simulation car is labelled and not the other
objects. So, the ConvNet can learn the difference to
the other objects. Data set 2 has been expanded and
contains the labels SimCar and SimAnimal.
Data sets
3 and 4 were created with some objects from the
model making area. We annotated this data manually.
Data set 3 contains a model car PiCar and data set 4
additionally ModCar, ModAnimal and ModPerson
from the real world. The following Figure 1 shows
some images of the created training data from our
data sets. The split of training and test data is 80/20.
The test data was used as validation data.
Figure 1: Our several data sets for object detection with
TensorFlow. First two rows: Data set from simulator. Last
two rows: Data set from model making area.
Each of data sets 1 and 3 have just one class (SimCar
and PiCar). So, results from simulation and model
making area can be compared to find a suitable object
detection system for hardware with limited resources.
If object detection on real data has to be implemented,
already published data sets MS COCO (Lin et al.,
2014) or PASCAL VOC (Everingham et al., 2010)
can be used. These already contain thousands of
annotated real objects.
3.1 Automatic Labelling
With our simulator in Unity 3D (Kuzmic and
Rudolph, 2020), thousands of annotated training data
(input and output data) could be generated
automatically. For the automatic generation of the
required data sets, two virtual cameras were installed
in the same place in a simulated car in the simulator.
The first camera could see everything in the virtual
environment (Fig. 2, left 1). The second camera only
saw the object to be recognised (Fig. 2, left 2). These
two images could be used for the further generation
of the training data. The image from the first camera
is the input image for the ConvNet. The image from
Object Detection with TensorFlow on Hardware with Limited Resources for Low-power IoT Devices
303
the second camera was converted into a greyscale
image first. To get the annotation of the data (output
data), a binary image was created from the greyscale
image next (Fig. 2, right 1). From this binary image
(black background, white object), the information for
the position of the object (top left and bottom right)
could be extracted. This gives the position of the
object (Fig. 2, right 2) for the input image as
coordinates for P (xMin, yMin) and Q (xMax, yMax).
Then, these coordinates are stored in an XML file
(Vuppala, 2020). The advantage of this approach:
many annotated training data with different objects
can be created in a short time. Several objects can also
be created in one image. Since, the position of the
objects is known, these objects can be moved or
exchanged among each other. Additionally, to create
many different training data the position and size of
the objects can be changed. The exchange of the
background image is also conceivable.
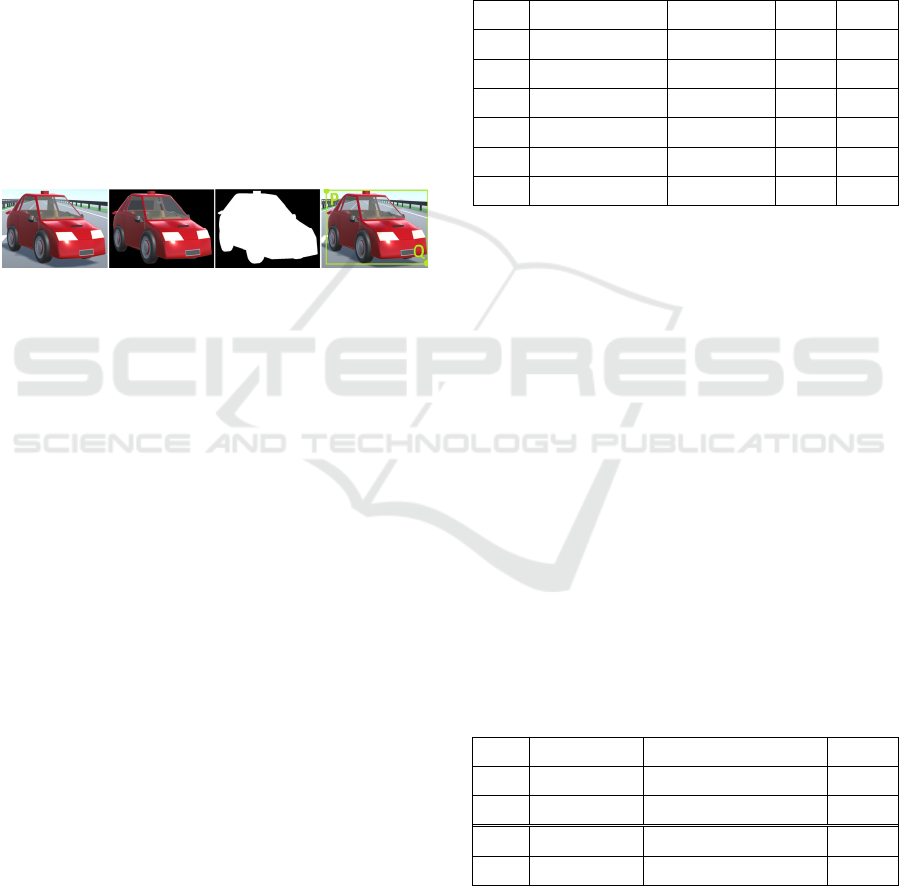
Figure 2: Training data generation in our Unity 3D
simulator. Left 1: Image from first camera. Left 2: Image
from second camera. Right 1: Binary image. Right 2:
Information for the position of the object P and Q.
3.2 Manual Labelling
For the data set with real data, some pictures from
several models from model making were taken.
Afterwards, these images were manually annotated
with the LabelImg tool (Tzutalin, 2021). This tool
simplifies the drawing of the rectangle around an
object and automatically determines the coordinates
for P (xMin, yMin) and Q (xMax, yMax). Then, these
coordinates are stored in an XML file with the same
name as the image file.
4 OBJECT DETECTION
For the object detection with TensorFlow (Huang et
al., 2017), pre-trained models, that were already
established in object detection with real data, were
investigated. The run time measurements of the pre-
trained TensorFlow (TF) models were performed on
the NVIDIA GeForce GTX 1660 Ti GPU. This makes
it possible to get first differences for the run times of
the models. Our pre-experiments were performed
with the same 200 images to measure the run time of
the models on our hardware and to make a small pre-
selection. There are several ConvNet models for
TensorFlow 2 available in the TensorFlow 2 detection
model zoo (Chen, 2021). These models have already
been pre-trained on the MS COCO 17 data set and can
detect and classify 90 objects. The speed of detection
is shown as frames per second (FPS) in table 2. The
accuracy is given as COCO mean average precision
(mAP) metric (Hui, 2018).
Table 2: Pre-experiment to determine the fastest
TensorFlow model. SSD 1: SSD MobileNet V2. SSD 2: SSD
ResNet50 V1 FPN. CenterNet: CenterNet HourGlass104.
No. Name Resolution mAP FPS
1 SSD 1 320x320 20.2 16.4
2 EfficientDet D0 512x512 33.6 5.7
3 SSD 2 640x640 34.3 4.7
4 SSD 2 1024x1024 38.3 2.3
5 CenterNet 1024x1024 44.5 1.7
6 EfficientDet D4 1024x1024 48.5 1.5
As expected, this small preliminary experiment
confirms: a smaller resolution of the model gives a
faster processing of the images. After a comparison
of the mAP and FPS it can be seen, that a higher
resolution of the ConvNets gives a more accurate
object detection. For this reason, a balance between
the precision and the run time had to be found to use
object detection on hardware with limited resources.
To compare the different TensorFlow models, some
models were trained and evaluated on the already
presented data sets. The base learning rate was set to
0.008. The warmup learning rate is 0.0001. The
batch size is 4. By default, these values are higher.
The MS COCO data set contains much more training
data. So in our scenario, we reduced these parameter
values. Tables 3 and 4 below show our trained
models. Steps denotes the value for the last training
step. This parameter is important to avoid
overtraining of the model.
Table 3: Overview of trained EfficientDet D0 512x512
models.
No. Steps Data Set mAP
1 150 k Sim 1 95.8
2 100 k Sim 2 87.1
3 150 k Mod 1 91.7
4 100 k Mod 2 76.4
A comparison of the precisions shows that models
with higher input image size are more accurate
(comparison between table 3 no. 2 and table 4 no. 2).
NCTA 2021 - 13th International Conference on Neural Computation Theory and Applications
304

Table 4: Overview of trained SSD MobileNet V2 320x320
models.
No. Steps Data Set mAP
1 150 k Sim 1 93.4
2 100 k Sim 2 79.6
3 150 k Mod 1 92.1
4 100 k Mod 2 69.3
All trainings were carried out with the same settings
of the parameter and training data. First, the models
trained with the simulation data were evaluated.
Sometimes these models detect objects in places
where no objects can be seen. To solve this, more
training data with the PiCar and many different
shapes is needed. Afterwards, we started with the
EfficientDet D0 512x512 model and one output class
to get a model which detects individual objects from
reality and needs few resources. Here, only the PiCar
and no other objects are detected and classified.
Figure 3 shows this recognition. Rectangles show the
detection of the object by the ConvNet.
Figure 3: Object detection with EfficientDet D0 512x512
model (no. 3 in table 3). Class: PiCar.
To make a comparison, the SSD MobileNet V2
320x320 model was trained with the same output
class (Fig. 4). As can be seen, this model is less
accurate in recognising the PiCar (figures 3 and 4,
marked in blue). But this is not reflected in the mAP
(comparison between table 3 no. 3 and table 4 no. 3).
These recognitions are completely acceptable for our
purpose and sufficient for our application.
Figure 4: Object detection with SSD MobileNet V2 320x320
model (no. 3 in table 4). Class: PiCar.
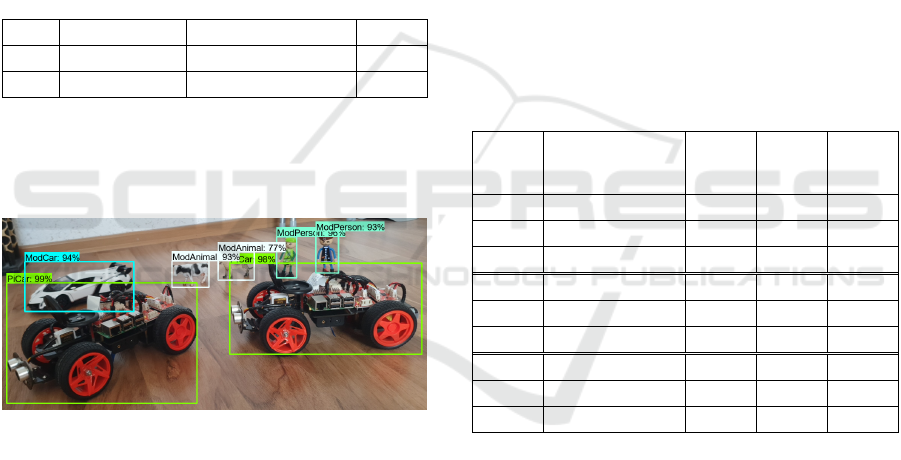
Subsequently, these models were extended. Figure 5
shows the EfficientDet D0 512x512 model with four
output classes. This model detects and classifies the
objects very exactly. The detected position and size
of the objects also match. Here, a precision of 76.4 %
can be achieved. For comparison, figure 6 shows the
detections of the SSD MobileNet V2 320x320 model
with four output classes, too. Also, this model
recognises very exactly the objects with four classes
PiCar, ModCar, ModAnimal, ModPerson and
achieves a lower precision of 69.3 %. But even this
detection is completely sufficient for our purpose.
Also, the never seen objects could be detected by our
models. For example, a Lego person, a model horse
and a blue model car are recognised by these two
models (Fig. 7).
Figure 5: Object detection with EfficientDet D0 512x512
model (no. 4 in table 3). Classes: PiCar, ModCar,
ModAnimal, ModPerson.
Figure 6: Object detection with SSD MobileNet V2 320x320
model (no. 4 in table 4). Classes: PiCar, ModCar,
ModAnimal, ModPerson.
During training the ConvNets have already seen
figures of model persons, model animals and model
cars. These ConvNets learned the similar shapes of
the objects and not only images from the training data
set.
Figure 7: Object detection on never seen objects. First row:
Detection with EfficientDet D0 512x512 model (no. 4 in
table 3). Last row: Detection with SSD MobileNet V2
320x320 model (no. 4 in table 4).
Object Detection with TensorFlow on Hardware with Limited Resources for Low-power IoT Devices
305
Furthermore, every other object with an unknown
shape is recognised as a PiCar. The models have
never seen any object with a similar shape (contour)
during the training. Thus, the object cannot be clearly
classified. As a result, the first output class PiCar is
assigned to this unknown object. This problem can be
solved by enlarging the data set. More training data
with the PiCar and many different objects (different
shapes) is needed. So, the difference to other shapes
can be learned. Additionally, we have converted the
SSD MobileNet V2 model with 320x320 pixels to a
224x224 pixel model. This model is not present in the
TensorFlow 2 model zoo (Chen, 2021). Since, it is
interesting to see how the models perform in
precision and run time. Table 5 shows an overview of
the accuracy of these models.
Table 5: Overview of trained SSD MobileNet V2 224x224
models.
No. Steps Data Set mAP
1 150 k Mod 1 90.9
2 100 k Mod 2 60.6
With this model 60.6 % accuracy is achieved. For
comparison, the SSD MobileNet V2 320x320 model
achieves 69.3 % (no. 4 in table 4). The next figure 8
shows this object detection on the Mod 2 data set.
Figure 8: Object detection with SSD MobileNet V2 224x224
model. Classes: PiCar, ModCar, ModAnimal, ModPerson.
5 EXPERIMENTS
The following experiments were carried out to
compare the functionality and the run time of our
different TensorFlow models on the same hardware.
The resolution is in the format width x height.
Training of the ConvNets on Google Colab: Intel
Xeon 2.30 GHz CPU, 26 GB RAM, NVIDIA Tesla
P100-PCIe-16GB GPU. Run time measurements
with GPU: Intel i7-9750H 2.60 GHz CPU, 16 GB
RAM, 256 GB SSD, NVIDIA GeForce GTX 1660 Ti
GPU. Run time measurements on Raspberry Pi 3 B
for hardware with limited resources: ARM Cortex-
A53 1.2 GHz CPU, 1 GB RAM, 8 GB SD. This gives
the possibility to compare the results afterwards and
to find the optimal object detection system. The test
input images for the respective systems are also the
same.
5.1 Run Time on GPU
As can be seen in previous section 4 very good results
in object detection were already achieved with the
EfficientDet and SSD MobileNet models. In this
experiment we test the run time of these models on
hardware with GPU. Therefore, we only test the run
time of the models for the real data from model
making area (Tab. 6). Afterwards, these results can be
compared with the run times achieved on the
hardware with limited resources. First column
contains the number (id) of the experiment (Exp.
No.).
Table 6: Run time overview of trained TensorFlow models
on hardware with GPU. EfficientDet: EfficientDet D0
512x512 TF2. SSD 224: SSD MobileNet V2 224x224 TF2.
SSD 320: SSD MobileNet V2 320x320 TF2.
Exp.
No.
Model Steps
Data
Set
Run
Time
[FPS]
1 EfficientDet 150 k Mod 1 14.6
2 EfficientDet 100 k Mod 2 14.2
3 EfficientDet 150 k Mod 2 14.1
4 SSD 224 150 k Mod 1 40.1
5 SSD 224 100 k Mod 2 39.2
6 SSD 224 150 k Mod 2 40.8
7 SSD 320 150 k Mod 1 39.8
8 SSD 320 100 k Mod 2 38.1
9 SSD 320 150 k Mod 2 38.3
As can be seen in table 6, the fastest model is SSD
MobileNet V2 224x224 with 150 k steps and four
output classes PiCar, ModCar, ModPerson and
ModAnimal. This model achieves approx. 41 FPS.
These measurements do not include loading and
processing of the input images. With one class PiCar
the same model accomplishes up to 40 FPS.
5.2 Run Time on Limited Resources
In the following experiment the run time
measurements are carried out on hardware with
limited resources. A Raspberry Pi 3 B was used for
this test. To increase the run time of processing a
quantised SSD MobileNet V2 224x224 model was
created for this experiment. Quantisation converts the
NCTA 2021 - 13th International Conference on Neural Computation Theory and Applications
306
weights of the model from float to uint8 (TensorFlow
Performance, 2021). TFLite represents a converted
model from TensorFlow Core to TensorFlow Lite.
Table 7 shows the run time measurements at a glance.
Table 7: Run time overview of trained TensorFlow models
on hardware with limited resources. EfficientDet:
EfficientDet D0 512x512. SSD 224 Q: SSD MobileNet V2
Quantized 224x224. SSD 224: SSD MobileNet V2 224x224.
SSD 320: SSD MobileNet V2 320x320.
Exp.
No.
Model Steps
Data
Set
Run
Time
[FPS]
1 EfficientDet 150 k Mod 1 -
2 EfficientDet 100 k Mod 2 -
3 EfficientDet 150 k Mod 2 -
4 SSD 224 Q 150 k Mod 1 3.2
5 SSD 224 Q 100 k Mod 2 2.8
6 SSD 224 Q 150 k Mod 2 3.0
7 SSD 224 150 k Mod 1 1.4
8 SSD 224 100 k Mod 2 1.4
9 SSD 224 150 k Mod 2 1.4
10 SSD 320 150 k Mod 1 0.9
11 SSD 320 100 k Mod 2 0.9
12 SSD 320 150 k Mod 2 0.9
For the EfficientDet D0 512x512 models the
measurement was automatically stopped by the
Raspberry Pi after some time. No run time
measurements could be carried out for these models
on a Raspberry Pi. An out-of-memory error has
occurred on this system. As can be seen after these
experiments: the SSD MobileNet V2 Quantised
224x224 model with 150 k steps and a PiCar output
class is the fastest model. Here, the model
accomplishes approx. 3.2 FPS. These measurements
also do not include loading and processing of the
input images. With four classes PiCar, ModCar,
ModPerson and ModAnimal the same model achieves
up to 3 FPS.
5.3 Evaluation of the Run Time
After the performance tests of the models have been
completed, evaluating of the run times of these
different models could be started. Therefore, it is
important to find a balance between sufficient
accuracy and the run time of the models. Also, some
experiments show longer training does not affect the
run time. The run time depends only on the model
architecture, on size of the input resolution and on
size of the output classes of the ConvNet. For
hardware with GPU: real-time object detection can be
achieved with the models SSD MobileNet V2
224x224 and SSD MobileNet V2 320x320 (exp. no. 4
to 9 in table 6). For hardware without GPU: approx.
3.2 FPS can be achieved with the SSD MobileNet V2
Quantized 224x224 model on the Raspberry Pi 3 B
(exp. no. 4 in Table 7). To speed up this object
detection, the tflite runtime-2.5.0-cp37 library
(TensorFlow Lite, 2021) and a quantised SSD
TensorFlow 1 model were used (TensorFlow
Performance, 2021). The run time measurements of
the non-lite TensorFlow 2 models were performed
with the TensorFlow 2.4.0-rc2 library (TensorFlow
Core, 2021) on the Raspberry Pi 3 B. Additionally,
object detection does not have to evaluate every
frame. Object detection can be done as soon as
anomalies are detected. In an autonomous vehicle it
can be done, for example, with the radar sensor. In
smart surveillance cameras it could be the motion
sensor, for example.
5.4 Sim-to-Real Transfer
While training the different models with the
simulation and the model data the following research
question arose: If the objects in the simulation look
similar to model objects from the real world, which of
our ConvNets can best recognise the real model
objects? To answer this question, we have trained two
different models to perform a transfer learning
approach. By creating the data in the simulation,
many different data with many different models of an
object can be created. Additionally, there are already
a lot of modelled objects from the video game field.
So, the modelling of own objects is not required. For
this sim-to-real transfer we tested two models
EfficientDet D0 512x512 and SSD MobileNet V2
320x320. These models were trained with the same
data set Sim 1 (includes SimCar) and 150 k steps to
compare the results afterwards. Table 8 shows the
comparison of the models evaluated on the test data
from simulation and reality.
Table 8: Overview of trained TensorFlow sim-to-real
models with object detection in simulation and real model
data.
Exp.
No.
Model Detect
Sim
Detect
Real
1 EfficientDet D0 512x512 Yes Yes
2
SSD MobileNet V2
320x320
Yes No
As can be seen in figure 9, first row, the SSD
MobileNet V2 320x320 model achieves accurate
recognition on the simulation data. However, the
Object Detection with TensorFlow on Hardware with Limited Resources for Low-power IoT Devices
307

detection on the real model data does not work (Fig.
9, last row). Green rectangle shows the detection of
the object by the ConvNet. Thus, the SSD MobileNet
V2 320x320 model is only suitable for recognising
already seen objects during the training. According to
our experiments, this model is not suitable for the
sim-to-real approach. We assume the resolution of
this ConvNet is too small.
Figure 9: Sim-to-real transfer with SSD MobileNet V2
320x320. First row: Images from simulation. Last row:
Model car images from the real world.
On the other hand, the EfficientDet D0 512x512
model is suitable for a sim-to-real approach. The next
figure 10 shows the object detection with this model.
The model car can be detected in simulation (Fig. 10,
first row) and in real data from the real world (Fig.
10, last row). The images of the model car were never
seen by this ConvNet before.
Figure 10: Sim-to-real transfer with EfficientDet D0
512x512. First row: Images from simulation. Last row:
Model car images from the real world.
As can be seen, the EfficientDet D0 512x512 model
detects the model cars very accurate. Conversely,
some of the other objects (animals and persons) are
also detected as SimCar (Fig. 11).
Figure 11: Object detection with EfficientDet D0 512x512
Model. Left: Detected model horse. Middle: Detected
model person. Right: Detected model dog.
The reason is, such data was never seen by the
ConvNet. So, the model has only learned the shape of
the object SimCar and did not have other objects for
comparison. However, this sim-to-real approach is
worthy of improvement. We assume that these
inaccuracies can be corrected with several training
data and different models in simulation. But on the
whole, from our experiments can be seen: the sim-to-
real transfer can be successfully performed in object
detection with the EfficientDet D0 512x512 Model.
6 CONCLUSIONS
This section summarizes once again the points that
were introduced in this paper. For object detection
with TensorFlow we have focused on hardware with
limited resources for low-power IoT devices. The
acquisition of automated annotated training data from
the simulation is also presented. Furthermore,
training data from individual objects in the field of the
model making to compare the results afterwards were
created. Additionally, several different TensorFlow
models were trained to find a balance between the
accuracy and the run time of these models. According
to our experiments the SSD MobileNet V2 with
224x224 pixels as well as the same model with
320x320 pixels resolution is suitable for object
detection in real-time scenarios with GPU. A suitable
model for object detection in hardware with limited
resources for low-power IoT devices is the SSD
MobileNet V2 Quantized 224x224 model. This model
achieves up to 3.2 FPS on a Raspberry Pi 3 B without
hardware extension. The SSD MobileNet V2 224x224
models achieve an effective balance between
accuracy and run time. Finally, a transfer learning
approach in object detection was conducted in this
work. With the EfficientDet D0 512x512 model this
sim-to-real approach can be successfully carried out.
7 FUTURE WORK
As already announced, the goal of our future work is
to successfully conduct a sim-to-real transfer,
including our lane and object detection we have
developed for the model making area. This means the
simulated environment is completely applied to a real
model vehicle. In this approach, we focus on
developing software for hardware with limited
resources for low-power IoT devices. Additionally,
we want to set up a model test track like a real
motorway for this experiment. Another important
aspect on the motorways is the creation of an
emergency corridor for the rescue vehicles in the case
NCTA 2021 - 13th International Conference on Neural Computation Theory and Applications
308

of an accident. Thus, the behaviour of the vehicles in
the simulation can be compared with the behaviour of
the model vehicles in reality. It is also conceivable to
extend this object detection by a distance
measurement to the detected objects on the lane. This
can be used, for example, to protect the radar sensor
in self-driving cars. When developing software for
hardware with limited resources for low-power IoT
devices it is also interesting to see how the run time
can be improving with a Raspberry Pi 4 B with
hardware extension such as the Intel Neural Compute
Stick 2 (CNET, 2018) or the Google Coral USB
Accelerator (Coral, 2020). This approach will be
explored in our future research.
REFERENCES
Beltrán, J., Guindel, C., Moreno, F. M., Cruzado, D., García,
F., De La Escalera, A., 2018. BirdNet: A 3D Object
Detection Framework from LiDAR Information. 2018
21st International Conference on Intelligent
Transportation Systems (ITSC), IEEE, ISBN 978-1-
7281-0324-2.
Chen, Y. H., 2021. TensorFlow 2 Detection Model Zoo.
Github.com. [online]. Available at: https://github.com/
tensorflow/models/blob/master/research/object_detectio
n/g3doc/tf2_detection_zoo.md. Accessed: 03/03/2021.
CNET, 2018. Faster new Intel AI brain sticks into the side of
your PC for $99. The Neural Compute Stick 2 uses a
Movidius Myriad X artificial intelligence chip and is
geared for prototype projects. Cnet.com. [online].
Available at: https://www.cnet.com/news/faster-new-
intel-ai-brain-sticks-into-the-side-of-your-pc-for-99/.
Accessed: 10/05/2021.
Coral, 2020. USB Accelerator datasheet. Coral.ai. [online].
Available at: https://coral.ai/docs/accelerator/ datasheet/.
Accessed: 10/05/2021.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn, J.,
Zisserman, A., 2010. The PASCAL visual object classes
(VOC) challenge. International Journal of Computer
Vision (IJCV), Volume 88, Issue 2, pp. 303-338.
Fink, M., Liu, Y., Engstle, A., Schneider, S. A., 2019. Deep
learning-based multi-scale multi-object detection and
classification for autonomous driving. In:
Fahrerassistenzsysteme 2018, pp. 233-242. Springer,
ISBN 978-3-658-23751-6.
Huang, J., Rathod, V., Sun, C., Zhu, M., Korattikara, A.,
Fathi, A., Fischer, I., Wojna, Z., Song, Y., Guadarrama,
S., Murphy, K., 2017. Speed/Accuracy Trade-Offs for
Modern Convolutional Object Detectors. IEEE
Conference on Computer Vision and Pattern Recognition
(CVPR). ISBN 978-1-5386-0457-1.
Hui, J., 2018. mAP (mean Average Precision) for Object
Detection. COCO mAP. Jonathan-hui.medium.com.
[online]. Available at: https://jonathan-hui.medium.com/
map-mean-average-precision-for-object-detection-45c1
21a31173. Accessed: 10/05/2021.
Kahn, G., Abbeel, P., Levine, S., 2020. LaND: Learning to
Navigate from Disengagements. arXiv: 2010.04689.
Kuzmic, J., Rudolph, G., 2020. Unity 3D Simulator of
Autonomous Motorway Traffic Applied to Emergency
Corridor Building. In Proceedings of the 5th
International Conference on Internet of Things, Big Data
and Security, ISBN 978-989-758-426-8, pp. 197-204.
Kuzmic, J., Rudolph, G., 2021. Comparison between Filtered
Canny Edge Detector and Convolutional Neural
Network for Real Time Lane Detection in a Unity 3D
Simulator. In Proceedings of the 6th International
Conference on Internet of Things, Big Data and Security,
ISBN 978-989-758-504-3, pp. 148-155.
Li, P., Chen, X., Shen, S., 2019. Stereo R-CNN Based 3D
Object Detection for Autonomous Driving. Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pp. 7644-7652.
Lin, T. Y., Maire, M., Belongie, S, Hays, J., Perona, P.,
Ramanan, D., Dollár, P., Zitnick, C.L., 2014. Microsoft
COCO: common objects in context. In: Fleet D, Pajdla T,
Schiele B, Tuytelaars T, editors. Computer Vision-
ECCV 2014. Springer, ISBN 978-3-319-10602-1, pp.
740-755.
Tan, J., Zhang, T., Coumans, E., Iscen, A., Bai, Y., Hafner,
D., Bohez, S., Vanhoucke V., 2018. Sim-To-Real:
Learning Agile Locomotion For Quadruped Robots.
Proceedings of Robotics: Science and System XIV,
ISBN 978-0-9923747-4-7.
TensorFlow Core, 2021. TensorFlow Core v2.4.1, API
Documentation. TensorFlow.org. [online]. Available at:
https://www.tensorflow.org/api_docs. Accessed:
07/05/2021.
TensorFlow Lite, 2021. For Mobile & IoT. TensorFlow.org.
[online]. Available at: https://www.tensorflow.org/lite.
Accessed: 09/05/2021.
TensorFlow Performance, 2021. For Mobile & IoT, Post-
training quantization. TensorFlow.org. [online].
Available at: https://www.tensorflow.org/lite/performan
ce/post_training_quantization. Accessed: 09/05/2021.
Tzutalin, 2015. LabelImg. Github.com. [online]. Available
at: https://github.com/tzutalin/labelImg. Accessed:
07/05/2021.
Vuppala, S., R., 2020. Getting data annotation format right
for object detection tasks. Medium.com. [online].
Available at: https://medium.com/analytics-vidhya/
getting-data-annotation-format-right-for-object-
detection-tasks-f41b07eebbf5. Accessed: 03.03.2021.
Wikipedia, 2021. Tesla Autopilot, Driving features.
Wikipedia.org. [online]. Available at:
https://en.wikipedia.org/wiki/Tesla_Autopilot#cite_note
-:2-70. Accessed: 05/03/2021.
Zaghari, N., Fathy, M., Jameii, S. M., Shahverdy, M., 2021.
The improvement in obstacle detection in autonomous
vehicles using YOLO non-maximum suppression fuzzy
algorithm. The Journal of Supercomputing (2021). DOI:
10.1007/s11227-021-03813-5.
Zhu, Q., Wang, L., Wu, Y., Shi, J. (2008) Contour Context
Selection for Object Detection: A Set-to-Set Contour
Matching Approach. In: Forsyth D., Torr P., Zisserman
A. (eds) Computer Vision – ECCV 2008. ECCV 2008.
Lecture Notes in Computer Science, vol 5303. Springer,
Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-
88688-4_57 ISBN 978-3-540-88685-3.
Object Detection with TensorFlow on Hardware with Limited Resources for Low-power IoT Devices
309
