
Building Operating Systems: A Cloud-based Architecture for Enabling
Knowledge Representation and Improving the Adaptability in Smart
Buildings
Adrian Taboada-Orozco
a
, Kokou Yetongnon
b
and Christophe Nicolle
c
Laboratory CIAD, Univ. Bourgogne Franche-Comt
´
e, CIAD EA 7533, 21000 Dijon, France
Keywords:
Internet of Things, Knowledge Representation, Smart Building, Building Automation Systems, Building
Operating Systems, Smart Cities, Adaptability.
Abstract:
Hardware and software’s constant evolution opens new horizons for developing systems focused on buildings.
Thanks to this evolution, the smartization of them is possible. The target of building automation systems is
always to reduce human intervention, thus avoiding errors and maximizing the building resources. However,
these systems still require an operator that knows the building’s topology, the elements inside, the dwellers’
preferences, and how to operate the automation system. The operator uses this knowledge to adapt the au-
tomation system by configuring parameters and thresholds to deal with the most common issues in buildings.
This paper introduces a new approach named WITTYM-BOS (W-BOS) that consists of a unique Building
Operating System (BOS) architecture, doted with a knowledge representation comparable with the operators’
knowledge. In this way, we transfer the abilities of an operator to improve the adaptability of a building au-
tomation system like BOS. To construct the knowledge, we combine static and dynamic information such as
Industrial Foundation Classes (IFC) and data coming from the Internet of Things (IoT). We construct a pre-
liminary prototype to illustrate our concept and validate use cases. Our work opens new horizons to innovative
applications that profit from the easy understandability of our approach.
1 INTRODUCTION
Automation systems have been evolving with the ex-
ponential improvement of hardware and software.
Furthermore, automation has reached a unique inflec-
tion point towards the smartization of objects. Since
the conception of the first Building Automation Sys-
tem (BAS) in 1850 (Martirano and Mitolo, 2020),
they have been reducing human intervention progres-
sively. This fact has been assumed as smartization
of buildings (Buckman et al., 2014). However, this
term is not precise and also evolves. A clear ex-
ample is Domotic, early considered a smart build-
ing system (Buckman et al., 2014). Domotic displays
data and allows local control. Although Domotic au-
tomates building elements like lights or doors, it is
still dependent on an operator. In this case, the do-
motic itself does not make the building smart (Sle-
man and Moeller, 2011). Instead, the operator uses its
a
https://orcid.org/0000-0002-2396-3286
b
https://orcid.org/0000-0002-6949-1050
c
https://orcid.org/0000-0002-8118-5005
knowledge of building topology and elements inside
to solve dwellers’ issues. Beyond the operator’s inner
knowledge, it possesses a capacity to adapt the system
to new scenarios.
The rigid architecture of BAS has pointed out spe-
cific management of building tasks such as monitor-
ing thermal comfort or energy consumption. It is this
specificity that has impeded its adaptation to new sce-
narios. BAS systems like Heating Ventilation and
Air Conditioner (HVAC) controllers, Programmable
Logic Controllers (PLC), Supervisory Control and
Data Acquisition (SCADA), and Building Manage-
ment Systems (BMS) are examples of rigid build-
ing automation systems that require highly trained ex-
perts to manipulate the data and operate the system.
The main issue of BAS remains on how to break
with their rigidity and how to provide adaptability to
them. We believe that by transferring the operator’s
knowledge and simplifying its access and the con-
trol of the entire system (hardware and software), we
make a building fully adaptable to new issues. Con-
sequently, the smartization of the building is possi-
ble. While the term smart is still debatable, some
162
Taboada-Orozco, A., Yetongnon, K. and Nicolle, C.
Building Operating Systems: A Cloud-based Architecture for Enabling Knowledge Representation and Improving the Adaptability in Smart Buildings.
DOI: 10.5220/0010650400003064
In Proceedings of the 13th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2021) - Volume 2: KEOD, pages 162-169
ISBN: 978-989-758-533-3; ISSN: 2184-3228
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

researchers support our belief in equating smartness,
and adaptability (Beetz et al., 2009). The term adapt-
ability has a crucial connotation in the automation
field. This term is used to describe the ergonomic of
the system towards end-users (ISO9241-210, 2019)
and it is the final barrier of BAS systems.
Nowadays, the term Building Operating System
(BOS) emerges to define a system able to solve and
simplify the complex underlying hardware and soft-
ware of BAS. BOS is defined as an intermediate sys-
tem between field equipment and services (Sleman
and Moeller, 2011). This definition has not yet been
clarified. BOS is cutting-edge technology, which does
not have a clear definition nor a defined architecture.
However, BOS does have a clear objective, which
consists of providing adaptability to buildings sys-
tems (Vermorel, 2020).
In this paper, we address the central issue
of BAS by proposing a knowledge representation
named Building Brain Knowledge Representation
(B
2
rainKR) incorporated as a module in a unique
BOS architecture. We called the entire system
WITTYM-BOS (W-BOS). W-BOS is an enriching
environment composed of modules to manage the flux
of information and access to end-users. The function
of B
2
rainKR is to improve even more the adaptabil-
ity that BOS already provides. In this way, the system
can be adaptable without requiring a deep understand-
ing of the building features. Besides, we propose an
innovative cloud-based BOS architecture that harmo-
nizes data flux and creates the most favorable condi-
tions for users to develop applications.
B
2
rainKR module represents the operator’s
knowledge and is made with ontologies that re-use
static and dynamic information of the building. The
static part is represented by ontologies based on
the standard Industrial Foundation Classes (IFC)
files (ISO 16739:2018). IFC files contain geometric
information of the buildings as well as their elements.
The dynamic part is the information coming from the
Internet Of Things (IoT). This information populates
the ontological representation. Precisely, we re-use
existing ontologies such as SAREF4Bldg
1
and
Building Topology Ontology (BOT)
2
ontologies to
construct B
2
rainKR.
To illustrate how W-BOS can deal with an emer-
gent issue, we evaluate a use case in our cloud-based
prototype. In this experiment, we display five single
steps to create a ”hello-world” application that solves
the use case issue.
The rest of the paper is as follows. Related work
is described in section 2. Our approach is explained
1
https://saref.etsi.org/saref4bldg/v1.1.2/
2
https://w3c-lbd-cg.github.io/bot/
in section 3. The procedure to create applications and
interfaces is illustrated in section 4. Finally, section 5
discusses and concludes the paper.
2 RELATED WORK
Research in BOS systems focuses on opening systems
to end-users not only as consumers but also as devel-
opers. BOS proposal approaches have firstly defined
BOS as middleware hardware and software placed in
the fog computing layer. However, nowadays, new
cloud services and the boom of IoT have extended and
re-located BOS.
The author (Fierro and Culler, 2015) introduces
XBOS as an open-source system, aiming to monitor
real-time conditions in buildings and control actua-
tors. Similarly, (Dawson-Haggerty et al., 2013) intro-
duces BOSS, an approach that monitors and controls
field devices. These works describe complete archi-
tectures to simplify the information flux from IoT to
the application layer. However, they neglect the open-
ness aspect, not allowing clear access to data. Be-
sides, these systems are presented as fully middleware
APIs.
A step forward is presented in the work of the
authors (Kciuk, 2014), (Rosen et al., 2004) and
(Wenjiang et al., 2009), they introduce OpenWRT,
HomeOS, and VxWorks systems respectively. Open-
WRT is a GNU Linux environment aimed to extend
the services of a communication router. In this way,
extending the communication purpose of the router
into an administrator of tasks. HomeOS is a system
part of Microsoft research aimed to optimize tasks in
house applications. In other words, it seeks to autom-
atize domotic tasks. HomeOS points out to reduce
human intervention in automation systems, and it also
includes a space for applications. VxWorks’ approach
aims to exploit real-time data coming from sensors.
The architecture of VxWorks allows users to create
subroutines dedicated to specific tasks. From a global
perspective, these systems enable end-user to inter-
vene and create dedicated services. However, these
architectures do not conceive important aspects like
integration of data, security, and scalability. In the
case of HomeOS, the exciting aspect is the concep-
tion of a set of re-configurable applications. HomeOS
marks a milestone towards BOS and open services for
buildings.
Nowadays, cloud services are mature enough and
stable to host complex applications that require high
processing skills. It is the case of BIM; some pro-
posals described in (Dave et al., 2018) and (D
¨
ollner
and Hagedorn, 2007) proposes to extend the web
Building Operating Systems: A Cloud-based Architecture for Enabling Knowledge Representation and Improving the Adaptability in Smart
Buildings
163

BIM platforms to display and handle IoT data. These
works aim to open this information to a collaborative
environment.
BIM is closely associated with BOS. They share
the same common interest, which is buildings. BIM
platforms are excellent ways to display data in 3D or
2D virtual models. The authors (Dibley et al., 2012)
and (Curry et al., 2013) propose to use BIM as an ex-
tended BAS. In their work, they present a semantic
model to integrate IoT data into BIM. The idea is to
exploit the geometrical description of BIM with cur-
rent information coming from the physical building.
Despite this enriching integration, there is still an is-
sue concerning complexity. BIM complexity is chal-
lenging itself. These platforms already integrate data
of different users in a collaborative environment, in-
cluding administrative information and different for-
mat files (images, diagrams, or pictures.). Adding
more complexity to BIM can disrupt its scalability.
Recent commercial proposals have described archi-
tectures considering BIM as part of BOS to display
data (Anonymous, 2019).
Buildings are intricate and large structures com-
posed of many spaces, elements, and devices. Over
time, ontologies have been widely used to repre-
sent buildings’ knowledge and leveraged to solve
dwellers’ most common issues such as thermal com-
fort, energy consumption, and personal security in
many kinds of research. The author (Compton
et al., 2012) proposes Semantic Sensor Networks
(SSN/SOSA) represent devices in buildings like IoT.
In their work, these authors point out to use SSN
and reasoners to manage building. Nevertheless, the
scope of this ontology is limited to observation and
actuation, it lacks Spatio-temporal concepts. These
are limited, and there is no clear definition of the
most common building elements and their properties
like unities or types. The authors (Rasmussen et al.,
2018) have combined SSN and BOT to complete the
geospatial gap of SSN. However, these approaches
lack of expressiveness of BOT about building mate-
rials, dimensions, and the topology itself. Besides,
the authors have increased non-standardized termi-
nology to describe the missing part to deal with this
gap. The authors (Balaji et al., 2016) propose us-
ing Brick Schema Ontology (BRICK) to represent
building knowledge. Brick possesses a rich vocabu-
lary of building elements. This ontology is oriented
towards design and construction (Esnaola-Gonzalez
et al., 2016). Although Brick overcomes and achieves
a good description, but it does not describe relations
between physical spaces. The author (Schneider,
2017) proposes to complete this gap by evaluating
Brick’s alignment to BOT, demonstrating consistency
between them. IFC-based approaches emerge as a
plausibly way to standardize building vocabulary in
ontologies involving building features. For instance,
the author (Esnaola-Gonzalez et al., 2016) argues that
IFC is being widely implemented in Building Infor-
mation Modeling (BIM) field and has been accepted
by most building designers, so building development
should be close tied with IFC. The IfcOWL ontol-
ogy proposed by the author (Pauwels et al., 2017)
takes EXPRESS schemes from IFC to model the rep-
resentation of the building. The transformation from
IFC files into ifcOwl has been suggested by (Beetz
et al., 2009) in its work, the author proposes a semiau-
tomatic transformation. Although ifcOWL contains
high alignment with the IFC standard, the ontology
is complex and includes many classes that might not
be useful to represent the context of devices. The au-
thor (de Farias et al., 2015), proposes IfcWoD as an
adaptation between IFC and OWL that allows full ex-
ploitation of OWL. IfcWod aims to reduce data re-
dundancy by avoiding some classes of IfcOwl. This
approach is interesting to reduce the complexity of
IfcOwl. However, our objective is to construct an
object-oriented knowledge representation. In this way
reduce even more complexity of IFC to OWL trans-
formation. The author (Daniele et al., 2015) proposes
the SAREF4Bldg ontology as an IFC-based approach
to describe building physical elements. This ontology
extends SAREF ontology by adding 72 classes that
include building objects. It is a summarized version
of ifcOWL that only takes building elements. IFC
files contain implicit information of building topol-
ogy like adjacency of spaces. This fact is interest-
ing to exploit but not necessarily practical. The study
of the author (Schneider, 2017) reveals an alignment
of SAREF4Bldg with BOT showing high compati-
bility and simplicity compared with IfcOWL. We re-
mark that our work aims to profit from the most recent
technology to construct a simple and effective archi-
tecture located entirely at the cloud computing level.
Moreover, we do not consider BOS as only a middle-
ware layer. Instead, we believe that the functions of
BOS must go further and improve the understandabil-
ity of the building. We strongly believe that transfer-
ring knowledge to a BOS system is crucial to achieve
full adaptability. Otherwise, W-BOS would fall into a
miscellaneous misconception of smart systems simi-
larly to domotic.
3 W-BOS FRAMEWORK
W-BOS is an architecture composed of five intercon-
nected modules in opposition to monolithic systems
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
164
developed in this domain. The main objective of a
modular BOS is to guarantee interoperability between
systems and the extensibility of services. In this way,
it is possible to replace one module without affecting
the others. Beyond, we aim to create the most fa-
vorable conditions to create applications by enabling
access to data and knowledge through a set of APIs
functions. Additionally, our system counts with ex-
tra tools to become even easier to use this knowledge
(e.g., reasoners). W-BOS profits from recent mature
technology such as cloud services and IoT. Thanks to
this groundbreaking technology, we propose a cloud-
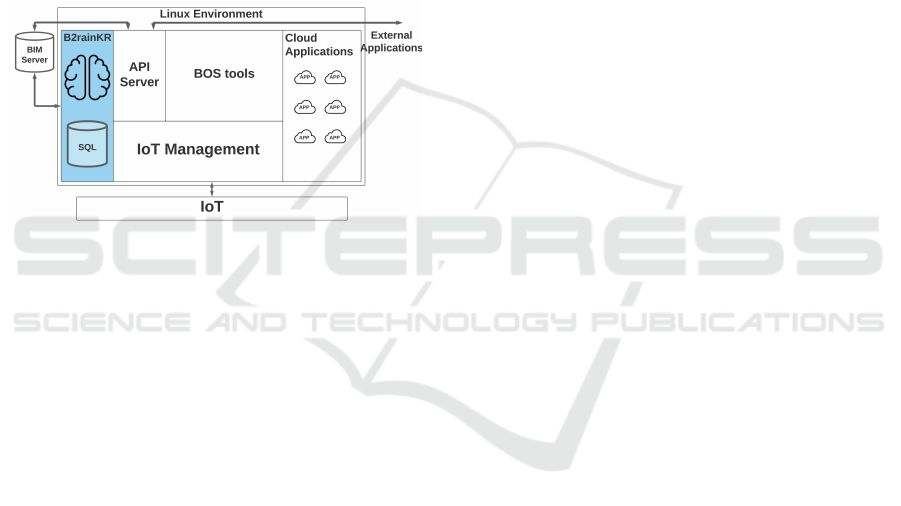
based solution for buildings. As illustrated in figure
1, W-BOS is composed of five autonomous modules
divided into two groups management and knowledge
modules.
Figure 1: Modular W-BOS architecture, IoT Block and
BIM server.
3.1 Knowledge Modules
These modules are tools and knowledge-based infor-
mation. The main target is to transfer the operator’s
knowledge to the W-BOS system, which is challeng-
ing, considering that the operator had to build this
knowledge by hard training.
To describe buildings’ features based on a com-
mon vocabulary of elements, equipment, and type of
spaces can be tedious and need high expertise. Even
in this way, the description can be imprecise. To avoid
misinterpretation and allow interoperability between
systems, a standard reference is needed. The stan-
dard IFC emerges as a plausible solution to define and
name with high accuracy building elements. Our aim
with these modules is to move towards open systems
following a standard guideline.
The representation of the static elements of a
building gives good spatial information. However,
this is not enough to construct knowledge. Buildings
are dunk in data that need to be taken into account.
Related work trusts on complex multi-protocol de-
vices to obtain this information from various field de-
vices. Nowadays, the use of IoT has simplified this.
Many IoT are used as a direct source of data and as
gateways to homogenize communication. IoT are a
direct source of dynamic data that completes the rep-
resentation of knowledge.
The following subsections explain how the static
and dynamic information is combined in a knowl-
edge representation named Building Brain Knowl-
edge Representation (B
2
rainKR).
3.1.1 B
2
rainKR Static Components
The static component of B
2
rainKR is IFC informa-
tion that contains all physical elements of a build-
ing and their relations between them. The IFC
standard has the two most used versions IFC2x3
and IFC4. The evolution of objects has allowed
buildings to get more complexity, as reflected in
these two versions. IFC2x3 describes elements
as a type of one single object. For example, in
IFC2x3, a boiler is described as a type of en-
ergy conversion device(ifcEnergyConversionDevice).
On the other hand, IFC4 contains more precise
description of objects such as boilers(ifcBoiler),
heaters(ifcSpaceHeater), solar panels(ifcSolarPanel)
among others. This fact increases the complexity of
interoperability between other systems. For instance,
the standard IFC2x3 and IFC4 are widely used by
Building Modeling Applications(BIM), and the tran-
sition between IFC2X3 towards IFC4 is still in pro-
cess. To construct knowledge over these two versions
of IFC, we use SAREF4Blds ontology. SAREF4Blds
ontology contains classes of building objects based on
the IFC4 version. Besides, we propose the alignment
of IFC2x3 with SAREF4Blds, as shown in figure 2.
Beyond the description in SAREF4Blds of build-
ing elements like doors, walls, or electronic equip-
ment, there is still a lack of relation between
spaces, as stated in previous work. Additionally to
SAREF4Blds, we use the alignment with BOT ontol-
ogy proposed by the author (Schneider, 2017). The
idea is to use relations like ”bot:adjacentZone” and
”bot:intersectsZone” to complete the description of
the building. The combination and alignment are
illustrated in figure 2. A significant advantage of
SAREF4Bldg over ifcOWL and ifcWod is its object-
oriented aim, which is particularly useful and compat-
ible with W-BOS’s goal to decrease the complexity of
the entire system, even the knowledge representation.
On the other hand, it is also possible to extract some
classes or re-use ifcOWL and ifcWod partly. How-
ever, the question is how to discriminate the classes
and properties. A work that has already been done
in SAREF4Bldg ontology. Besides, SAREF4Bldg’s
versatility allows the interoperability between the two
IFC versions(IFC2x3 and IFC4).
Building Operating Systems: A Cloud-based Architecture for Enabling Knowledge Representation and Improving the Adaptability in Smart
Buildings
165
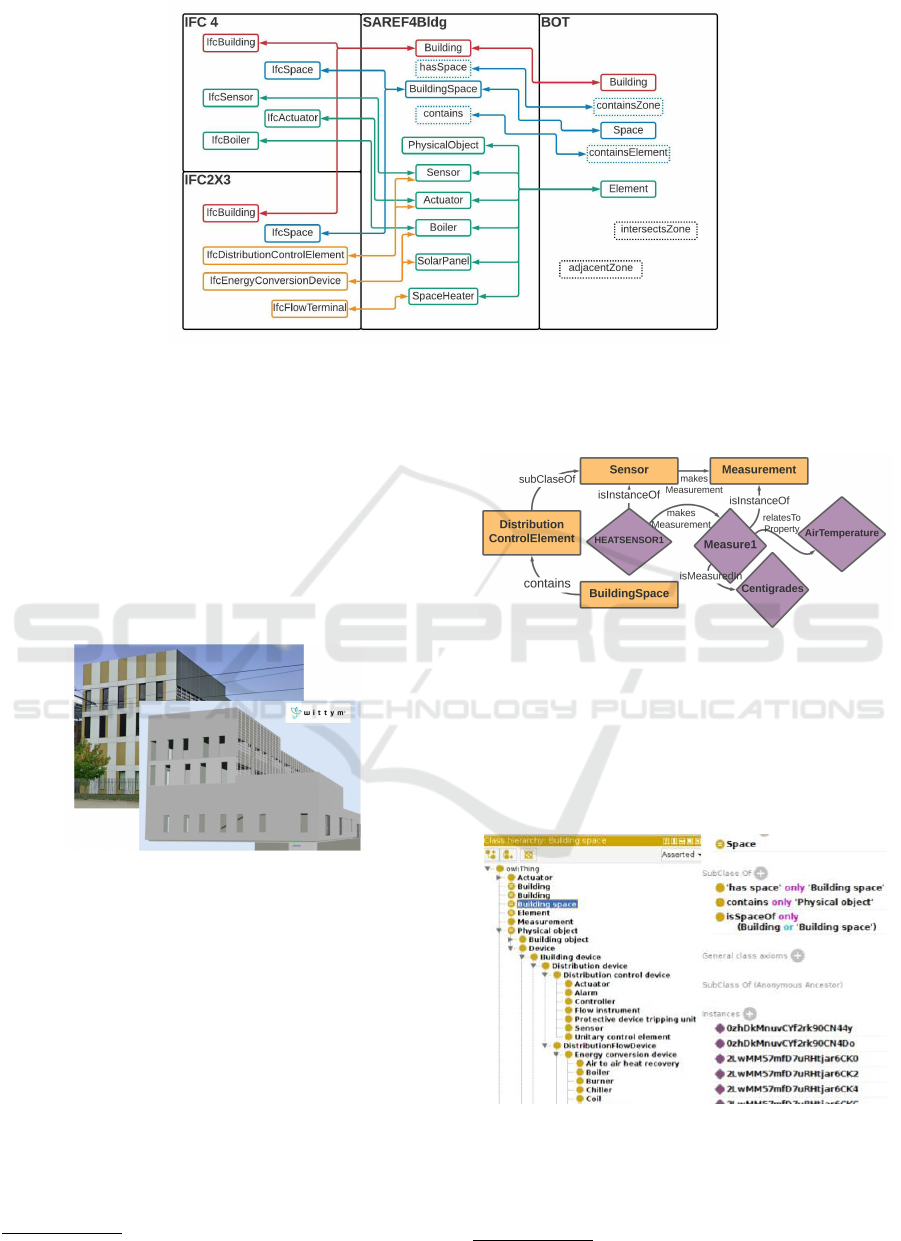
Figure 2: The windows IFC4, IFC2x3, and SAREF4Bldg represent the alignments between IFC and SAREF4Bldg concepts.
The two-sense arrows indicate the equivalence, and the color code represents main concepts such as Building (red), Spaces
(blue), and Objects(green). In IFC2x3 as no direct or explicit equivalence, the yellow block contains the general ancestor of
IFC2x3 objects. The windows SAREF4Bldg and BOT display the alignment between them and the properties (dotted blocks).
In our prototype, we use an IFC2x3 file that be-
longs to the description of our laboratory building.
Figure 3 shows the real physical building, and its 3D
digital model using WITTYM-BIM
3
application. The
WITTYM-BIM is a collaborative web-based applica-
tion that supports the actors of the building construc-
tion domain by reproducing a digital twin of the phys-
ical building.
Figure 3: Physical building of our laboratory CIAD and its
the 3D representation using WITTYM-BIM application.
3.1.2 B
2
rainKR Dynamic Components
The dynamic part of B
2
rainKR is heterogeneous data
coming from IoT. The ontologies are suitable to inte-
grate these data. An example of the manner an inte-
gration is made in B
2
rainKR is depicted in figure 4.
Figure 4 shows how a measurement is related to a
space, a sensor, and the features of the measurement
itself. To make this integration possible, we store
the data into a relational database (SQL), aiming to
store row data and enable non-knowledge-based ap-
plications. The data coming from IoT contain meta-
data attached to the measured value, independently
3
https://wittym.com/
Figure 4: Part of T-Box and A-BOX from sensors and their
measurements extracted form B
2
rainKR.
from the communication protocol (MQTT, HTTP, and
LoRWan
4
). This extra information (ID and TimeS-
tamp) is also used to create many instances of sensors
and measurements in the ontology. The figure 5 dis-
plays B
2
rainKR representation in protege.
Figure 5: B
2
rainKR in protege, left side the classes hierar-
chy of SAREF4Bldg. In the right part, the building space as
instances of the class Building Space.
4
https://lora-alliance.org/about-lorawan/
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
166

3.1.3 BOS Tools Module
The BOS tools module contains a set of tools to facil-
itate building applications resources to construct ap-
plications. One primary tool is the embedded rea-
soner. This semantic reasoner is available for infer-
ring new data, which is helpful in the cases where
the inference is required to explain the physical de-
scription of the relation between sensors and build-
ing elements. The reasoner translates knowledge and
makes it easily understandable for humans. For ex-
ample, a temperature sensor installed on a partition
of a wall must be reflected by the temperature of the
room (and not of the partition). It is the inference
mechanism that finds the space associated with the
partition. In this example, the inference would use
the relation ”saref4Bldg:contains” between the build-
ing space and ”saref4Bldg:sensor”. In our prototype,
we embedded a Pellet-based reasoner (Openllet
5
).
3.2 Management Modules
The management modules focused on opening access
to W-BOS to end-users. Therefore, easy access can
be translated into better adaptability of the system.
3.2.1 IoT Management
The IoT management modules represent a subsys-
tem that handles IoT connections, authentication, and
communication. In our prototype, we have imple-
mented a python-based client that holds a register
of IoT device topics and identification codes. This
module receives and then transfers data to the storage
module. Additionally, it also re-transmit commands
coming from the cloud applications. In our prototype,
we have used experimental IoT devices connected to
an MQTT cloud broker that transfers all IoT data to
W-BOS.
3.2.2 API Server
The objective of the API server module is to
break with silos of data by unifying information in
B
2
rainKR and providing access to it. As if it were a
bus of communication between applications and data.
This module is critically essential for W-BOS. Its pri-
mary function is to guarantee access and provide a
consistent flux of information. In our prototype, we
implemented a Swagger
6
API server that performs
SPARQL and SQL queries over B
2
rainKR by using
RFDlib
7
libraries. Besides, this module provides in-
5
https://github.com/Galigator/openllet
6
https://swagger.io/
7
https://rdflib.readthedocs.io/en/stable/
formation to the Wittym-BIM platform to display ap-
plications and IoT data. These APIs are also enabled
for external applications that might require more pro-
cessing skills. The API module has five functions de-
scribed below:
• Add rules into B
2
rainKR and extract inferred ax-
ioms
• Request the spatial measurement made by sensors
(by sensor ID)
• Request spatial adjacency of measures or actua-
tion (by BuildingSpace)
• Request positions of sensors ( by sensor ID)
• Request status of the building element (by data
properties)
3.2.3 Cloud Application Space
The cloud applications module is a specific space ded-
icated to the development of applications. In this way,
end-user can adapt the system to solve new issues in
new scenarios. This module profits from a Linux-
based environment over which applications can be
made using shell or high-level languages like python.
3.3 Field Devices and BIM Server
The prime function of IoT devices is to capture infor-
mation from the physical environment. They com-
pose the field layer. The hardware in our proto-
type is IoT devices composed of sensors and actua-
tors. These devices count with Wi-Fi connection over
which we implemented the MQTT protocol. MQTT
is a topic-based protocol consisting of two main com-
ponents: A broker aimed to administrate topics and
subscribers. On the other hand clients can publish
(transmit information) and subscribe (receive infor-
mation) over some determined topics. Our IoT plays
the role of clients and subscribers to transmit teleme-
try data and receive commands from W-BOS through
a broker.
4 W-BOS USE CASE EXAMPLE
This section presents how an application can be de-
veloped in W-BOS. We create the Internet of Things
Fire Detection Application (IOTFDAPP) as a ”hello-
world” example. The aim of showing this example
is to demonstrate that W-BOS efficiently exploits the
knowledge of the static elements and dynamic infor-
mation. IOTFDAPP’s objective is to determine the
presence of fire in a room and the surrounding spaces.
Building Operating Systems: A Cloud-based Architecture for Enabling Knowledge Representation and Improving the Adaptability in Smart
Buildings
167

The result of IOTFDAPP is the names of room spaces
that surround a room with fire. In our case, we use
the model of our laboratory building. This use case
can be helpful for firefighters to evacuate people in a
building. For this purpose, we employed 10 IoT phys-
ical devices installed in rooms of our laboratory. We
enable the API module to exchange information be-
tween the Wittym-BIM platform and W-BOS to dis-
play IoT data. The idea is to represent the result of
the IOTFDAPP application as a virtual sensor that
contains the names of these dependencies(Building
spaces like rooms). For this purpose, we follow the
following five steps required to create an application
in W-BOS:
• 1.Insert a rule, perform semantic reasoning and
query the ontology with the inferred axioms. In
this use case, the following rule describes our de-
sire: The rooms surrounding a space that reaches
a temperature higher than 50[Centigrades] must
be evacuated. Table 1 depicts this rule. The result
of the application is displayed in figure 6.
Table 1: Ontology rule in the API.
Ontology Rule
s4b:Sensor(?s)∧s4b:Measurements(?m)∧
s4b:makesMeasurement(?s,?m)∧
s4b:relatesToProperty(?m,AIRTEMPERATURE)∧
s4b:hasValue(?m,?v)∧bot: Space(space?)∧
s4b:conatins(?space,?s)∧
bot:adjacentZone(?space,?adjacent)∧
swrlb:greaterThan(?v, integer 50)
→ s4b:isluminated(?adjacent, true)
• 2.Request the result with the ”isIluminated” prop-
erty that has a Boolean value of ”true”.
• 3.Creates a virtual sensor label to transmit the re-
sult into W-BOS.
• 4.Create a virtual sensor in WITTYM-BIM
• 5.Request the API with the ID of the sensor. The
result of the application is displayed in figure 6.
5 DISCUSSION AND
CONCLUSIONS
This paper introduced W-BOS, a BOS architecture
doted with a knowledge representation that contains
static and dynamic information of the building. W-
BOS aims to solve the central issue of building au-
tomation by blending knowledge in a unique and open
architecture. We built a cloud-based prototype to
demonstrate W-BOS’s advanced adaptability. Specif-
ically, we have evaluated a ”hello-word” use case.
Figure 6: Result of IOTFDAPP displayed in WITTYM-
BIM. The plan in 3D belongs to the rooms of our laboratory
building floor.
We believe that our prototype covers essential
functions to reach a high level of adaptability. Never-
theless, a cloud solution already provides easy access
to information in geographical terms. Our proposed
architecture structures the data and their flux. By us-
ing knowledge, we firmly believe that the system is
more understandable and thereby easy adaptable. It
is possible to conceive the underlying operating sys-
tem (Linux) of W-BOS as the BOS itself. However,
related work reveals that data arrangement and flux
are more significant than the programming language
or the underlying operating system.
Beyond this evidence shown in this paper, there is
growing concern about the security of data that must
be addressed. Targeting this issue, we presume that
using knowledge can limit access to private user data
by creating rules according to the user’s privacy and
security policy.
A relevant challenge is a paradigm of combining
IoT and BIM information. To create B
2
rainKR we
transformed IFC2x3 to SAREF4Blds manually. Al-
though this method is valid, the task of transform-
ing IFC information manually into ontologies is in-
efficient. An automatic transformation can increase
the scalability of the system and simplify this process.
Despite this gap, we could describe most building de-
pendencies, sensing, and actuating devices without
creating new classes.
In the W-BOS prototype, we could quickly re-
quest the knowledge using the API module to develop
IOTFDAPP. Following the five steps, this task be-
comes easy. We think that more functions can make
this adaptation even easier. However, creating more
functions without a standardized guideline can reduce
the understandability of the system. Despite, this need
we could observe that the API facilitates access to
information by simplifying all complicated SPARQL
queries to the ontology model.
Our work paves the way for developing applica-
tions based on knowledge rather than only informa-
KEOD 2021 - 13th International Conference on Knowledge Engineering and Ontology Development
168

tion. We believe that by opening and facilitating the
control of building systems, we can count on more
appealing and efficient solutions.
ACKNOWLEDGEMENTS
This project is funded by the KID’S AI Company. We
thank the members of this company involved in the
WITTYM project and especially the engineer’s team
for providing insights.
REFERENCES
Anonymous (2019). Etude de cas: le futur
campus d’emlyon business school - ur-
ban practices. https://urbanpractices.com/
etude-de-cas-le-futur-campus-demlyon/. (Accessed
on 05/05/2021).
Balaji, B., Bhattacharya, A., Fierro, G., Gao, J., Gluck,
J., Hong, D., Johansen, A., Koh, J., Ploennigs, J.,
Agarwal, Y., et al. (2016). Brick: Towards a uni-
fied metadata schema for buildings. In Proceedings
of the 3rd ACM International Conference on Systems
for Energy-Efficient Built Environments, pages 41–50.
Beetz, J., Van Leeuwen, J., and De Vries, B. (2009). Ifcowl:
A case of transforming express schemas into ontolo-
gies. Artificial Intelligence for Engineering Design,
Analysis and Manufacturing: AI EDAM, 23(1):89.
Buckman, A. H., Mayfield, M., and Beck, S. B. (2014).
What is a smart building? Smart and Sustainable Built
Environment.
Compton, M., Barnaghi, P., Bermudez, L., Garcia-Castro,
R., Corcho, O., Cox, S., Graybeal, J., Hauswirth, M.,
Henson, C., Herzog, A., et al. (2012). The ssn on-
tology of the w3c semantic sensor network incubator
group. Journal of Web Semantics, 17:25–32.
Curry, E., O’Donnell, J., Corry, E., Hasan, S., Keane, M.,
and O’Riain, S. (2013). Linking building data in
the cloud: Integrating cross-domain building data us-
ing linked data. Advanced Engineering Informatics,
27(2):206–219.
Daniele, L., den Hartog, F., and Roes, J. (2015). Created
in close interaction with the industry: the smart ap-
pliances reference (saref) ontology. In International
Workshop Formal Ontologies Meet Industries, pages
100–112. Springer.
Dave, B., Buda, A., Nurminen, A., and Fr
¨
amling, K. (2018).
A framework for integrating bim and iot through open
standards. Automation in Construction, 95:35–45.
Dawson-Haggerty, S., Krioukov, A., Taneja, J., Karandikar,
S., Fierro, G., Kitaev, N., and Culler, D. (2013).
{BOSS}: Building operating system services. In 10th
{USENIX} Symposium on Networked Systems Design
and Implementation ({NSDI} 13), pages 443–457.
de Farias, T. M., Roxin, A., and Nicolle, C. (2015). Ifc-
wod, semantically adapting ifc model relations into
owl properties. arXiv preprint arXiv:1511.03897.
Dibley, M., Li, H., Rezgui, Y., and Miles, J. (2012). An on-
tology framework for intelligent sensor-based build-
ing monitoring. Automation in Construction, 28:1–14.
D
¨
ollner, J. and Hagedorn, B. (2007). Integrating urban gis,
cad, and bim data by servicebased virtual 3d city mod-
els. Urban and regional data management-annual,
pages 157–160.
Esnaola-Gonzalez, I., Berm
´
udez, J., Fernandez, I., and Ar-
naiz, A. (2016). Eepsa as a core ontology for energy
efficiency and thermal comfort in buildings. Semantic
Web, 1.
Fierro, G. and Culler, D. E. (2015). Xbos: An exten-
sible building operating system. In Proceedings of
the 2nd acm international conference on embedded
systems for energy-efficient built environments, pages
119–120.
ISO9241-210 (2019). Iso - iso 9241-210:2019 - ergonomics
of human-system interaction — part 210: Human-
centred design for interactive systems. https://www.
iso.org/standard/77520.html.
Kciuk, M. (2014). Openwrt operating system based con-
trollers for mobile robot and building automation sys-
tem students projects realization. In 15th International
Workshop on Research and Education in Mechatron-
ics (REM), pages 1–4. IEEE.
Martirano, L. and Mitolo, M. (2020). Building automa-
tion and control systems (bacs): a review. In 2020
IEEE International Conference on Environment and
Electrical Engineering and 2020 IEEE Industrial and
Commercial Power Systems Europe (EEEIC/I&CPS
Europe), pages 1–8. IEEE.
Pauwels, P., Zhang, S., and Lee, Y.-C. (2017). Seman-
tic web technologies in aec industry: A literature
overview. Automation in Construction, 73:145–165.
Rasmussen, M. H., Frausing, C. A., and Karlshøj, C. A.
H. J. (2018). Integrating building information model-
ing and sensor observations using semantic web. In
SSN@ ISWC, pages 48–55.
Rosen, N., Sattar, R., Lindeman, R. W., Simha, R., and
Narahari, B. (2004). Homeos: Context-aware home
connectivity. In International Conference on Wireless
Networks, pages 739–744.
Schneider, G. F. (2017). Towards aligning domain ontolo-
gies with the building topology ontology. In Proceed-
ings of the 5th Linked Data in Architecture and Con-
struction Workshop (LDAC 2017).
Sleman, A. and Moeller, R. (2011). Soa distributed operat-
ing system for managing embedded devices in home
and building automation. IEEE Transactions on Con-
sumer Electronics, 57(2):945–952.
Vermorel, L. (2020). What is a building operating system?
https://blog.wattsense.com/building-management/
what-is-building-operating-system/#:
∼
:text=A%
20Building%20Operating%20System%20is,data%
20from%20the%20building’s%20equipment. (Ac-
cessed on 04/29/2021).
Wenjiang, L., Nanping, D., and Tongshun, F. (2009). De-
sign of the embedded remote monitor system for
building automation system based on the vxworks. In
2009 Asia-Pacific Conference on Computational In-
telligence and Industrial Applications (PACIIA), vol-
ume 1, pages 436–438. IEEE.
Building Operating Systems: A Cloud-based Architecture for Enabling Knowledge Representation and Improving the Adaptability in Smart
Buildings
169
