
Human-error-potential Estimation based on Wearable Biometric Sensors
Hiroki Ohashi
a
and Hiroto Nagayoshi
Hitachi Ltd., R&D Group, Tokyo, Japan
Keywords:
Human-error Potential, Internal State, Biometric Sensing, Physiological Sensor, Wearable Sensor, Machine
Learning, Signal Processing, Activity Recognition, Shop Floor.
Abstract:
This study tackles on a new problem of estimating human-error potential on a shop floor on the basis of wear-
able sensors. Unlike existing studies that utilize biometric sensing technology to estimate people’s internal
state such as fatigue and mental stress, we attempt to estimate the human-error potential in a situation where a
target person does not stay calm, which is much more difficult as sensor noise significantly increases. We pro-
pose a novel formulation, in which the human-error-potential estimation problem is reduced to a classification
problem, and introduce a new method that can be used for solving the classification problem even with noisy
sensing data. The key ideas are to model the process of calculating biometric indices probabilistically so that
the prior knowledge on the biometric indices can be integrated, and to utilize the features that represent the
movement of target persons in combination with biometric features. The experimental analysis showed that
our method effectively estimates the human-error potential.
1 INTRODUCTION
Reducing human error is crucially important for al-
most all the industries to improve productivity, pre-
vent defective products, and avoid serious accidents.
The development of IoT technology has advanced
the analysis of 4M (Man, Machine, Material, and
Method) factors, but it has been especially difficult to
quantitatively analyze the factor of “Man” due to its
uncertainty. The uncertainty is attributed to various
human factors including differences not only between
workers but also within workers originating from the
dynamically changing physical and mental states of
individual workers.
This study aims to develop a method to estimate
human-error potential of workers on a shop floor. The
visualization of human-error potential makes it possi-
ble to improve the working environment in various
ways such as by suggesting a short break to workers
who are found to have high error potential, by appro-
priately controlling air conditioning, and, more fun-
damentally, by reforming production lines in which
the error potential of the workers tends to be higher.
There have been relevant studies that aim to uti-
lize biometric sensing technology to estimate the in-
ternal state of humans such as fatigue (Sikander and
Anwar, 2019), mental stress (Panicker and Gayathri,
a
https://orcid.org/0000-0001-6970-2412
2019), drowsiness (Sahayadhas et al., 2012) (Ramzan
et al., 2019), and concentration (Uema and Inoue,
2017). The methods developed in these studies, how-
ever, cannot be trivially extended to estimate human-
error potential on shop floors for two reasons. First,
there is no formal definition of human-error potential
that can be directly used for formulating the estima-
tion problem in a computationally tractable way. Sec-
ond, the previous studies implicitly assume that target
persons are calmly seated, or at least they do not ac-
tively move, while workers usually move a lot on shop
floors, resulting in producing undesirable noise on the
measurement of the biometric sensors.
To overcome these difficulties, we first propose
a novel formulation, in which the human-error-
potential estimation problem is reduced to a classi-
fication problem. We try to classify the workers’ situ-
ation into different categories including a normal sit-
uation, where human-error-potential is expected to be
low, and typical undesirable situations, where human
errors have frequently occurred according to the lit-
erature. Second, we propose a new method for esti-
mating human-error potential in a situation in which
target persons do not necessarily stay calm. The key
ideas are to model the process of calculating biomet-
ric indices probabilistically so that the prior knowl-
edge on the biometric indices can be integrated to
achieve robust estimation under noise, and to utilize
the features that represent the movement of target per-
110
Ohashi, H. and Nagayoshi, H.
Human-error-potential Estimation based on Wearable Biometric Sensors.
DOI: 10.5220/0010642400003064
In Proceedings of the 13th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2021) - Volume 1: KDIR, pages 110-120
ISBN: 978-989-758-533-3; ISSN: 2184-3228
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

sons in combination with biometric features. The
experimental analysis showed that our method effec-
tively estimates the human-error potential.
The contributions of this study are summarized as
follows.
1. We propose, for the first time to the best of our
knowledge, a formulation for estimating human-
error potential on the basis of sensor data.
2. We propose a new method for estimating human-
error potential in a situation in which target per-
sons do not necessarily stay calm.
3. We experimentally verified the effectiveness of
the proposed formulation and the method for esti-
mating the human-error potential.
2 RELATED WORK
There have been intensive efforts to categorize human
errors from various aspects in order to systematically
understand them and thereby prepare effective coun-
termeasures to them. Elwyn Edward developed the
software, hardware, environment, liveware (SHELL)
model, which helps to analyze the factors that are re-
lated to human error of workers in aviation systems,
and Frank H. Hawkins later enhanced it and made it
more widely accepted (Hawkins, 1987). Swain and
Guttmann categorized the incorrect human outputs
into two major classes: omission error and commis-
sion error (Swain and Guttmann, 1983). The latter is
further divided into subcategories of selection error,
error of sequence, time error, and qualitative error.
Rasmussen presented three levels of human behavior
(skill-based, rule-based, and knowledge-based behav-
ior) to make it possible to develop separate models
for analysis (Rasmussen, 1983). Another common
method is to categorize errors into slips, lapse, and
mistakes, which represent “actions-not-as-planned”,
“failures of memory”, and “deficiencies or failures
in the judgemental and/or inferential processes”, re-
spectively (Reason, 1990). Although these studies
are helpful for systematically analyzing past errors or
preparing preventive measures in advance (Hale et al.,
1990)(Edmondson, 2004), they do not provide a con-
crete method for visualizing the live human-error po-
tential on a shop floor, which can dynamically change.
The relevant studies from that viewpoint are those
that have attempted to estimate people’s internal state
such as fatigue (Sikander and Anwar, 2019), mental
stress (Panicker and Gayathri, 2019), drowsiness (Sa-
hayadhas et al., 2012) (Ramzan et al., 2019), and con-
centration (Uema and Inoue, 2017). These studies
used various biometric sensing technologies together
with additional information. Wijsman et al. (Wi-
jsman et al., 2011) presented a method for detect-
ing mental stress using electrocardiogram (ECG),
respiration, skin conductance, and electromyogram
(EMG). Wang et al. (Wang et al., 2018) developed
a method for detecting a driver’s fatigue using elec-
troencephalographic (EEG) signals. Yamada and
Kobayashi (Yamada and Kobayashi, 2018) took a dif-
ferent approach for detecting fatigue on the basis of
eye-tracking data. Tsujikawa et al. (Tsujikawa et al.,
2018) and Sun et al. (Sun et al., 2018) used video
data for estimating the drowsiness. Uema and In-
oue (Uema and Inoue, 2017) developed a glasses-type
sensor for estimating the level of concentration on
the basis of electrooculography (EOG). These stud-
ies, however, cannot be trivially extended to estimate
human-error potential on shop floors mainly because
they implicitly assume that target persons are calmly
seated or at least do not actively move, whereas work-
ers usually move a lot on shop floors, resulting in
producing undesirable noise in the measurement of
the biometric sensors. Sun et al. (Sun et al., 2010)
proposed an activity-aware mental stress detection
method by using an accelerometer in combination
with ECG and galvanic skin response (GSR) sensors,
but the activities involved in their study were limited
to rather simple ones, namely, sitting, standing, and
walking.
The present study proposes a way to formulate
the human-error-potential estimation as a classifica-
tion problem, standing upon the characteristics of the
human-error potential that have been revealed in the
above-mentioned works. Then we propose a new
method for estimating human-error potential in a sit-
uation in which target persons work on a pseudo in-
dustrial operation.
3 FORMULATION OF
HUMAN-ERROR-POTENTIAL
ESTIMATION
3.1 Formulation based on Major Cause
of Human Errors
As described in Hawkins’s SHELL model (Hawkins,
1987) and Swain and Guttmann’s performance shap-
ing factor (PSF) (Swain and Guttmann, 1983),
human-error is caused by various factors including
not only the worker in question, but also other work-
ers, environment, software, and hardware. Ideally, all
these factors should be sensed and taken into account
when estimating human-error potential, but this study
Human-error-potential Estimation based on Wearable Biometric Sensors
111

focuses only on the worker in question, which is nat-
urally deemed most important, as the first step and
leaves the other factors for future works. To make the
model as general as possible without relying on a spe-
cific task’s characteristics, we focus on the possible
root cause attributed to general psychological char-
acteristics rather than focusing on the resultant cate-
gorization such as slip-lapse-mistake (Reason, 1990),
and omission-commission (Swain and Guttmann,
1983). In terms of the skill-rule-knowledge (SRK)
model by Rasmussen (Rasmussen, 1983), we focus
on the factor of “skill” since rule and knowledge are
not expected to dynamically change on shop floors
and therefore do not have to be sensed in a live
manner. Among the skill-based errors, the statistics
by Williamson et al. (Williamson et al., 1993), who
studied 2000 incident reports, showed that “inatten-
tion” and “haste” were the major contributing factors.
Inattention was found to be closely related to multi-
tasking by Ralph et al. (Ralph et al., 2014).
Standing upon these research outcomes, we at-
tempt to build a model that can detect the situations
where human-error tends to occur more frequently
according to the statistics. In this view, we can re-
duce the human-error-potential estimation problem to
a classification problem of a worker’s situation into a
normal situation and the situation where human-error
potential is deemed higher than usual. More formally,
we formulate the problem as the classification of three
situations: a worker is working normally, in a hurry,
and has to multi-task. We call the three conditions the
normal condition, time-pressure condition, and multi-
task condition, respectively.
3.2 Task Setting
We selected the replacement of a desktop PC’s SSD
as the experimental task because it contains basic op-
erations that are commonly done in a wide variety of
shop floors, e.g., screw tightening, wiring, and assem-
bly. The specific procedure of the task is as follows:
remove the screws of the side cover of the PC by
hand, remove the side cover, pull out the SSD mount,
unplug the cables attached to the SSD, remove the
screws using a screwdriver to detach the SSD from
the mount, replace the SSD with a new one, install
the screws to attach the new SSD to the mount using
the screwdriver, plug the cables into the SSD, place
the SSD mount back to the original position, and in-
stall the screws to attach the side cover (see Figure
1). Hereinafter, we call one series of this procedure
a “trial”. Trials lasted three minutes on average, but
they differed depending on the conditions and sub-
jects.
Figure 1: The SSD replacement task. Left: the video from
eye-tracking glasses, where the purple circle denotes the es-
timated gaze location. Right: the video from a fixed camera.
In the time-pressure condition, we and asked the
subjects to finish the trial within a defined time limit.
To increase the pressure, we told them the elapsed
time every 30 seconds and told them every 10 seconds
in the last 30 seconds. In the multi-task condition, we
gave them mental arithmetic problems of two digit
addition and subtraction. We read out the problems
and the subjects had to answer out loud while work-
ing on the SSD-replacement task. We did not give a
time limit for these math questions, or any penalty for
wrong answers.
3.3 Sensor Selection
We use a video camera, which does not require any
additional effort from workers for sensing. In addi-
tion, we use wearable ECG, EEG, EOG, eye-tracking
sensor, and accelerometer since they were found to
be useful for estimating internal states of humans in
the previous studies reviewed in section 2. GSR sen-
sors were also found to be useful, but we did not
use one since we found it significantly interfered with
the task in a preliminary experiment. The sensors
used in the experiment are Logicool HD Pro Webcam
C920 (a camera for third-person-view video), SMI
Eye-Tracking Glasses (ETG) (a glasses-type cam-
era for first-person-view video and gaze information),
TicWatch Pro (a smartwatch for acceleration data and
heart rate data), biosignalsplux (a wearable biometric
sensor for ECG and EOG data), and MindWave Mo-
bile 2 (a mobile brain-wave headset for EEG data).
Figure 2 shows these sensors.
4 ESTIMATION METHOD
4.1 Feature Extraction
This section explains the feature extraction method
for the human-error-potential estimation. First, sec-
tion 4.1.1 outlines the overall strategy for feature ex-
traction. Then, section 4.1.2 explains how to robustly
calculate important biometric indices using noisy sen-
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
112

(a) Subject with all sensors.
(b) Smartwatch.
(c) Eye-tracking glasses
(ETG).
(d) Wearable biometric
sensor.
(e) Brain-wave headset.
Figure 2: Sensors used in experiment.
sor data. Finally, section 4.1.3 introduces the features
that represent the body movement.
4.1.1 Overall Strategy
The raw signals of ECG, EOG, and EEG data are not
usually used for the analysis. Alternatively, certain
kinds of processing such as peak detection and fre-
quency domain analysis are first applied, and higher
level indices such as heart rate, blink frequency,
and signal intensity of a specific frequency of brain
waves are commonly used. This section outlines how
we process the data from sensors introduced in sec-
tion 3.3 to calculate such basic biometric indices. The
detailed formulation for dealing with sensor noise will
be given in section 4.1.2.
ECG data usually have periodic cycles that cor-
respond to the heart beat as shown in Figure 3(a).
We first detect peaks, called R waves represented by
red circles in the figure, and calculate the intervals of
the R waves, which are called RR intervals, or RRI
for short (Figure 3(b)). We then extract the follow-
ing ECG-related features per trial: the mean RRI over
each trial, the strength of low frequency signals (4 Hz
≤ f < 15 Hz) of RRI wave called LF, that of high
frequency signals (15 Hz ≤ f ) called HF, and the
ratio LF/HF. HF and LF are widely used as indica-
tors of the cardiac parasympathetic nerve activity and
that of both parasympathetic and sympathetic compo-
nents, respectively.
We apply the similar feature extraction to smart-
watch data. TicWatch Pro provides heart rate data,
(a) Example of ECG data.
(b) Example of RRI.
Figure 3: Example of ECG data and its RR interval (when
a subject is staying calm). x axis: time (s), y axis: electric
potential (mV) for (a) and interval (ms) for (b).
which correspond to 60/RRI, every second. There-
fore, we calculate RRI on the basis of the heart rate
data and extract the mean RRI, LF, HF, and LF/HF in
the same way as described above.
EOG data show sharp peaks when a subject blinks.
Therefore, we first detect these peaks and use the av-
erage frequency of blinks (times/minute) over each
trial as a feature. The details of the peak detection
method will be given in section 4.1.2.
The SMI ETG provides various eye-activity in-
formation including the gaze location in each video
frame, and the eye-event information such as visual
intake, saccade, and blink. We extract the following
features: the standard deviation of the gaze location
in horizontal and vertical directions, the mean and the
standard deviation of the distances of gaze location
between the two consecutive frames, the frequency of
the distance being larger than a threshold, the ratio of
visual-intake event, and the ratio of saccade event. We
do not use the blink event information as we found in
a preliminary experiment that it was not accurate.
The API of Mindwave Mobile 2 provides the sig-
nal strength of δ wave (1-3 Hz), θ wave (4-7 Hz),
low-α wave (8-9 Hz), high-α wave (10-12 Hz), low-
β wave (13-17 Hz), high-β wave (18-30 Hz), low-γ
wave (31-40Hz), mid-γ wave (41-50 Hz), the score
of concentration, and the score of meditation. These
measurements are provided every second. We use the
mean and standard deviation over each trial as the fea-
tures of EEG data.
The acceleration data obtained by the smartwatch
are first converted into a movement feature using the
method described in section 4.1.3. Then we calculate
its mean over each trial. Additionally, we subtract the
mean norm of the acceleration data from the raw ac-
celeration data and then convert the result and calcu-
late the mean in the same way as above. This is for
getting rid of the factor of gravity acceleration.
The video data of a fixed camera are first con-
verted into movement features in a way that is de-
scribed in section 4.1.3 and the mean over each trial
is used as video features.
Human-error-potential Estimation based on Wearable Biometric Sensors
113

Figure 4: Example of ECG data in SSD-replacement task.
Finally, we convert all the features described
above into the deviation from the values in the calm
state by subtracting the mean values of each feature
in the calm state. This is for reducing the between-
subject bias. The effect of this pre-processing will be
discussed in section 5.4.
4.1.2 Calculation of Basic Biometric Indices
under Noise
Wearable biometric data such as ECG and EOG data
easily suffer from noise caused by body movement.
For example, ECG data show clear peaks (R wave)
when a subject stays calm (Figure 3(a)), but it be-
comes difficult to accurately detect an R wave when
a subject moves as shown in Figure 4. We propose
a method for robustly calculating biometric indices
such as RRI by formulating the calculation process
using a probabilistic model, which can take the prior
knowledge about each biometric index into account.
We explain the method by using calculation of RRI
based on ECG data as an example.
Let x
t
denote the ECG measurement at time t and
define a set of the measurement as X
t
e
t
s
≡ {x
t
}
t
e
t=t
s
.
Let t
(n)
denote the timestamp of observing the n-th
R wave, and let y
(n)
denote the n-th RRI value. Note
that y
(n)
= t
(n+1)
−t
(n)
holds by the definition of RRI.
Let T be the length of ECG measurement sequence,
then the (n+1)-th RRI given a sequence of ECG mea-
surement X
T
1
and RRIs up to the n-th is modeled as
follows.
p(y
(n+1)
|X
T
1
,y
(n)
,...,y
(1)
)
= p(y
(n+1)
|X
T
t
(n+1)
,y
(n)
,...,y
(1)
) (1)
=
1
Z
p(X
T
t
(n+1)
|y
(n+1)
,y
(n)
,...,y
(1)
) (2)
p(y
(n+1)
,y
(n)
,...,y
(1)
)
(3)
=
1
Z
0
p(X
T
t
(n+1)
|y
(n+1)
,y
(n)
,...,y
(1)
) (4)
p(y
(n+1)
|y
(n)
,...,y
(1)
).
In equation (1), we used the assumption that the
RRIs up to the (n − 1)-th do not matter if the n-th
R wave is given. Z and Z
0
in equations (2) and (4),
respectively, are constant values for normalization.
p(X
T
t
(n+1)
|y
(n+1)
,y
(n)
,...,y
(1)
) in equation (4) de-
notes the probability of observing a sequence of
ECG measurement X
T
t
(n+1)
when an R wave, or peaks
of ECG data, are observed at time
ˆ
t
(n+1)
= t
(1)
+
∑
n+1
i=1
y
(i)
. This probability is expected to be higher if
the ECG measurement at time
ˆ
t
(n+1)
is high. There-
fore, we model it as follows.
p(X
T
t
(n+1)
|y
(n+1)
,y
(n)
,...,y
(1)
) =
1
C
1
(x
ˆ
t
(n+1)
)
α
, (5)
where C
1
is a normalization constant, and α is a hy-
perparameter. p(y
(n+1)
|y
(n)
,...,y
(1)
) in equation (4)
represents the probability of the (n + 1)-th RRI value
being y
(n+1)
given RRIs up to the n-th, and we model
it as follows.
p(y
(n+1)
|y
(n)
,...,y
(1)
)
=
1
C
2
N (y
(n)
,σ
2
1
) + βN (µ
(n)
,σ
2
2
) + γg(y
(n+1)
)
,
(6)
where N (y
(n)
,σ
2
1
) and N (µ
(n)
,σ
2
2
) denote a normal
distribution with mean y
(n)
and variance σ
2
1
, and that
of mean µ
(n)
=
1
n
∑
n
i=1
y
i
and variance σ
2
2
, respectively.
They model the prior knowledge that RRIs usually
do not drastically change compared with the previous
observation, and the mean value of the past observa-
tions. C
2
is a normalization constant, and β and γ are
hyperparameters. We define g(y
(n+1)
) as follows.
g(y
(n+1)
) =
1
∑
f
h
X
t
(n)
1
( f )
h
X
t
(n)
1
1
y
(n+1)
, (7)
where h
X
t
1
( f ) represents the signal strength of fre-
quency f in sequential data X
t
1
, which we model by
fast Fourier transform (FFT) applied to X
t
1
.
Finally, the (n + 1)-th RRI y
(n+1)
is estimated as
follows.
y
(n+1)
= argmax
ˆy
(n+1)
∈Y
(n+1)
p( ˆy
(n+1)
|X
T
1
,y
(n)
,...,y
(1)
), (8)
where Y
(n+1)
= {y
(n+1)
|y
min
< y
(n+1)
< y
max
∩ x
t
(n)
+
y
(n+1)
∈ M}. Here y
min
,y
max
are the minimum and
maximum possible RRI values that we preliminarily
define, and M is a set of local maxima of ECG values.
We use the same formulation for blink detection
with EOG data except that we introduce a uniform
distribution for equation (6) since it is not reasonable
to assume strong periodicity in blink detection.
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
114

4.1.3 Extraction of Movement Feature
We extract features related to subjects’ body move-
ment using acceleration data of smartwatch and video
data of a fixed camera, and use them in the human-
error-potential estimation method so that the method
can take the body movement into account.
Let (a
x,t
,a
y,t
,a
z,t
) denote the readings of a three-
axis accelerometer of a smartwatch at time t. We de-
fine the movement features calculated on the basis of
acceleration data as follows.
m
(acc)
t
=
q
a
2
x,t
+ a
2
y,t
+ a
2
z,t
(9)
To extract video-based movement features, we
first use a method proposed by Pavllo et al. (Pavllo
et al., 2019) to acquire a set of 3D locations of each
body joint {(l
l
l
(1)
t
,...,l
l
l
(J)
t
)}
T
t=1
, where l
l
l
(i)
t
represents
the i-th body joint’s 3D coordinate (l
( j)
x,t
,l
( j)
y,t
,l
( j)
z,t
) at
time t. The 3D coordinates are relative to the root
joint. We set J to be 17, which is a default value in the
previous work. We define the movement features cal-
culated on the basis of video data from a fixed camera
as follows.
m
(video, j)
t
=
r
l
( j)
x,t
− l
( j)
x,t−1
2
+
l
( j)
y,t
− l
( j)
y,t−1
2
+
l
( j)
z,t
− l
( j)
z,t−1
2
(10)
Note that these features are calculated joint-wise,
which results in J features being acquired.
4.2 Feature Selection
We can obtain 55 different features in total by the fea-
ture extraction method described in section 4.1. Al-
though it may be possible to make the model learn
sufficiently well using all the 55 features if there
are enough training data, the model may suffer from
over-fitting if the available training data are limited.
Therefore, we analyzed each feature in detail and
selected a set of features that showed a noticeable
tendency depending on the task conditions (normal,
time-pressure, and multi-task). As a consequence of
the analysis, we ended up selecting the 10 features
shown in Figure 5.
4.3 Classification Model
We use neural network for the classification model
unless otherwise stated. We use a simple fully con-
nected network rather than convolutional neural net-
works (CNN) and recurrent neural networks (RNN)
since it is not reasonable to assume locality and other
Figure 5: Ten selected features.The different colors corre-
spond to different subjects. Note that visual intake ratio and
saccade ratio have only nine subjects’ data because a subject
could not wear ETG due to an eyesight problem.
specific dependencies among the features described
in section 4.2. We will discuss the models other than
neural networks in section 5.4.
5 EVALUATION
5.1 Experimental Settings
We conducted an experiment to verify the effective-
ness of the proposed method with 10 subjects. The
experiment was conducted in a lab environment with
lab members. The experiment on a real shop floor
with real workers is one of our future works.
The overall experimental procedure is shown in
Figure 6. First, we explained the experiment to the
subjects. Then to eliminate the learning effect, they
practiced the SSD-replacement task without attach-
Human-error-potential Estimation based on Wearable Biometric Sensors
115
ing any sensors until they were sufficiently familiar
with the task. After they become confident doing the
task, we attached the wearable sensors and synchro-
nized all the sensors, calibrated the sensors if nec-
essary, and tested the connection. Then we let the
subjects be seated on chairs and asked them to stay
calm. We collected sensor data during this calm state.
Then the subjects practiced the task again with sen-
sors attached and confirmed that the sensors did not
disturb them in the task. We collected three trials
per condition (normal, time-pressure, multi-task), re-
sulting in nine trials per subject in total. We let the
subjects take a short break after every trial. We col-
lected sensor data in this break time as well for us-
ing them as measurement in the calm state. After fin-
ishing the first trial (e.g., normal condition) and the
subsequent short break, subjects worked on another
condition (e.g., time-pressure) and took a short break
again. Then they worked on the remaining condition
(e.g., multi-task) and took a short break. Hereinafter,
we call this set of three sequential trials a “cycle”.
They repeated this cycle three times. We let a one-
third of the subjects start with the normal condition,
another third start with the time-pressure condition,
and the rest start with the multi-task condition for the
counterbalance. One trial usually took from two to
four minutes, and the whole experiment including the
preparation took approximately two hours per subject.
5.2 Evaluation Protocol
We evaluated the performance by three-fold cross val-
idation, in which we split the data by aforementioned
cycles, unless otherwise stated. More specifically, we
used the data from two cycles for training and used
the data from the other cycle for test, and repeated
this three times with different combinations of train-
ing and test data. This resulted in 6 trials from each
subject for training data and the remaining 3 trials
from each subject for test data, ending up with 60 tri-
als in total for training data and 30 trials in total for
test data. We used the mean accuracy of this three-
fold cross validation for the basic evaluation metric.
5.3 Implementation Details
We optimized the hyperparameters including learning
rate, learning schedule, number of layers, and num-
ber of nodes using the TPE algorithm (Bergstra et al.,
2011) with Optuna (Akiba et al., 2019). As a result,
we set the number of hidden layers to 3 and the num-
ber of nodes in each layer to 200, 50, and 50. The
initial learning rate was 0.03, and it was decayed by
multiplying 1/t
0.5
at the t-th epoch. The hyperparam-
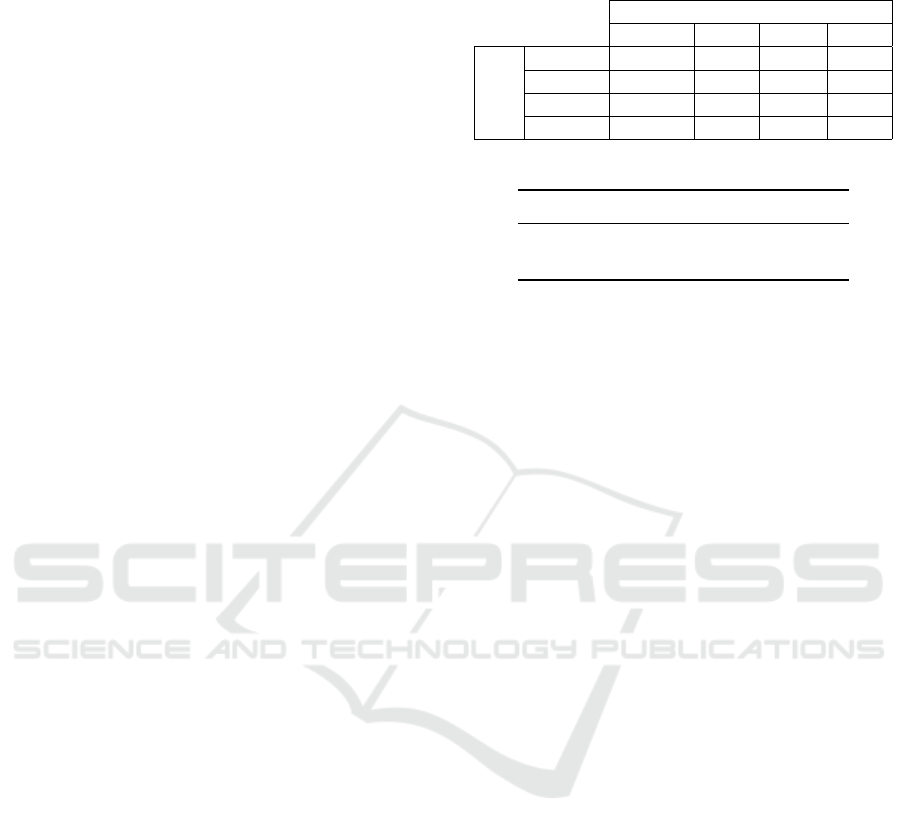
Table 1: Evaluation result. Time: time-pressure condition,
Multi: multi-task condition, GT: ground truth.
Estimated
Normal Time Multi Total
GT
Normal 7.3 2.3 0.3 10
Time 2.3 6.7 1.0 10
Multi 0.3 1.3 8.3 10
Total 10.0 10.3 9.7 30
Table 2: Comparison of feature pre-processing methods.
Pre-processing 3 classes 2 classes
Absolute 73.3 81.1
Relative 74.4 82.2
eters of models other than neural networks compared
in Table 5 were also optimized in the same way. If
a feature value was missing, we interpolated it with
the median value of the feature value over training
data. All the features were normalized by subtracting
means of each feature in the training data and dividing
them by standard deviations.
5.4 Results and Discussion
Main Result. Table 1 shows the main evaluation re-
sults. The overall accuracy was 74.4% (=67/90), and
the accuracy of binary classification between normal
condition and abnormal conditions, where human-
error tends to occur more frequently was 82.2%
(=74/90). The table shows that the multi-task con-
dition was more clearly distinguishable from the nor-
mal condition than the time-pressure condition was.
This observation agrees with the fact that all the sub-
jects said that they felt the multi-task condition was
the most difficult and the normal condition was the
easiest.
Analysis on Feature Pre-processing. Table 2
shows the effect of feature pre-processing described at
the end of section 4.1.1. “Absolute” denotes the result
obtained by using all the features directly, whereas
“Relative” denotes the result obtained by converting
features into the deviation from the values in the calm
state by subtracting the mean values of each feature in
the calm state. As the table indicates, “Relative” gave
slightly better performance than “Absolute”. We think
this is because different subjects have different base
values for biometric indices, and using values relative
to the calm states reduces this between-subject bias,
ending up in enabling us to focus more on the differ-
ence in the conditions.
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
116
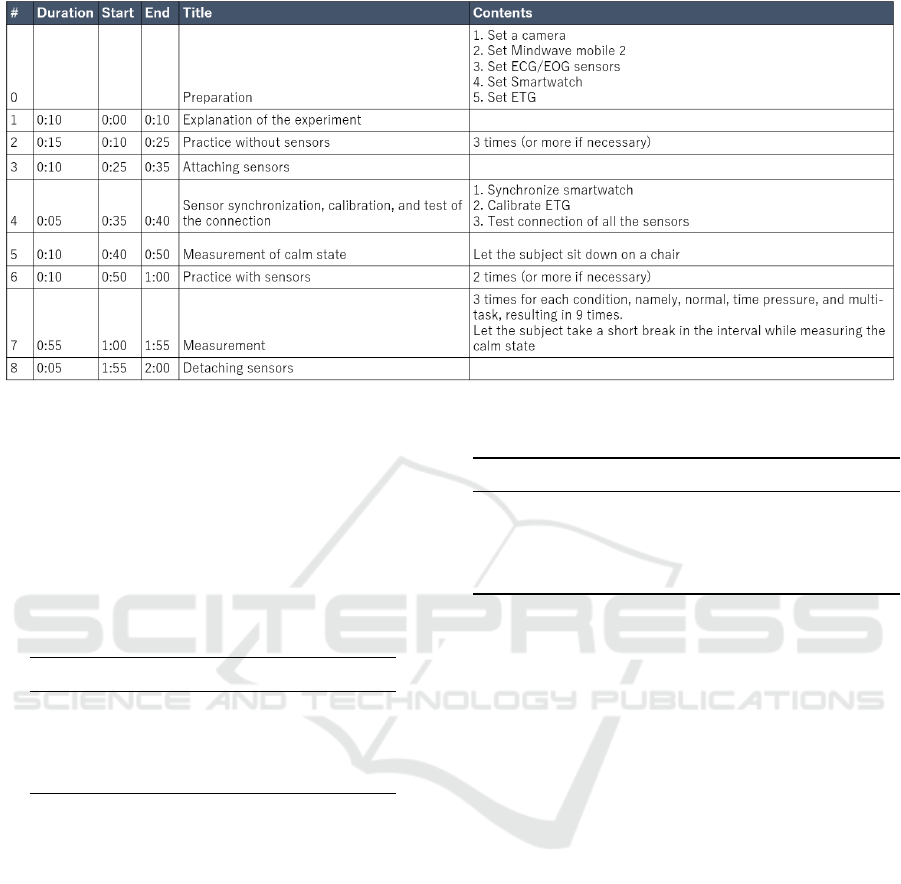
Figure 6: Experimental procedure.
Table 3: Ablation for the feature selection and the move-
ment feature. FS: the feature selection method described
in section 4.2. If this is unchecked, results are based on all
the available features without applying the feature selection.
MF: the movement features described in section 4.1.3. If
this is unchecked, results are only based on the biometric-
sensor data without using the movement features. #F: the
number of used features. 3 classes: normal, time-pressure,
and multi-task condition, 2 classes: normal condition and
abnormal condition where human-error tends to occur more
frequently.
# FS MF #F 3 classes 2 classes
1 36 56.5 71.1
2 X 6 70.0 78.9
3 X 55 61.1 65.6
4 X X 10 74.4 82.2
Ablation Study for the Feature Selection and the
Movement Feature. Table 3 shows the ablation
study for the feature selection method described in
section 4.2 and the movement features described in
section 4.1.3. The effectiveness of the feature selec-
tion is demonstrated by comparing #1 with #2, and #3
with #4. This suggests the importance of excluding
unnecessary features probably because the available
training data were small. Similarly, the effectiveness
of the movement feature is demonstrated by compar-
ing #1 with #3, and #2 with #4. This suggests the
importance of taking into account the information of
body movement when attempting to estimate human-
error potential, and possibly other psychophysiologi-
cal indices as well, in a situation where target subjects
do not stay calm.
Analysis on Feature-selection Methods. Table 4
compares different feature selection methods. #1 de-
Table 4: Comparison of different feature-selection methods.
# Feature selection #F 3 classes 2 classes
1 All features 55 61.1 65.6
2 PCA 10 61.1 65.6
3 Greedy 7 65.6 68.9
4 Analysis-based 10 74.4 82.2
notes the result obtained by using all the features
without applying any feature selection method. Note
that the movement features are also included. #2 de-
notes the result obtained by reducing the number of
dimensions to 10 with principal component analysis
(PCA). Interestingly, #2 did not result in better accu-
racy than #1. This may be because the neural network
could learn the (linear) transform that was equivalent
to PCA in the first layer. #3 is the result obtained by
selecting features greedily (see Algorithm 1 for de-
tails). #4 is the result obtained by using the manual
feature selection described in section 4.2. Although
the greedy feature selection gave slightly better results
than #1 and #2, the analysis-based selection resulted
in much better accuracy. The result suggests the effec-
tiveness of traditional feature engineering in this field
especially when the number of candidate features is
relatively low.
Analysis on Classification Models. Table 5 com-
pares different classification models. We found the
neural network worked the best. Note that the 10
manually selected features are used for all the mod-
els.
Analysis on Sensors. Table 6 shows the perfor-
mance depending on the available sensors. For the de-
ployment on shop floors, subjects, or workers, should
Human-error-potential Estimation based on Wearable Biometric Sensors
117

Algorithm 1: Greedy feature selection.
Input : F – a set of features
m– a classification model
N – the maximum number of
features to be selected
Output: BF – best features
1 SF ← {}// a set of selected features
2 n ← 1
3 a
best
← −1
4 for n ≤ N do
5 a
(n)
best
← −1
6 for f in F do
7 a ← m (SF ∪ { f })
8 if a > a
(n)
best
then
9 a
(n)
best
← a
10 f
selected
← f
11 end
12 end
13 SF ← SF ∪ { f
selected
}
14 F ← F \ { f
selected
}
15 if a
(n)
best
> a
best
then
16 BF ← SF
17 a
best
← a
(n)
best
18 end
19 end
Table 5: Comparison of different classification methods.
Classification method 3 classes 2 classes
Gaussian Na
¨
ıve Bayes 55.6 67.8
Decision Tree 65.6 72.2
k nearest neighbor 66.7 74.5
Random Forest 68.9 75.6
Support Vector Machine 72.2 81.1
Neural network 74.4 82.2
attach as few sensors as possible so that the sensors
do not disturb their work. The ideal scenario is to use
only a fixed camera, which does not disturb workers at
all, but this was found to be unrealistic from the view-
point of accuracy (#1). The next reasonable scenario
is to use a smartwatch alone (#2) or in combination
with a fixed camera (#3). However, the accuracies in
these conditions were still not satisfactory. Adding
EOG (#4), EEG (#5), and ETG (#6) one by one did
not improve the performance compared with using
only a fixed camera and a smartwatch. In contrast, us-
ing an ECG sensor in combination with a fixed cam-
era and a smartwatch achieved significantly better re-
sults. This result suggests that it is very important to
include features calculated on the basis of ECG sig-
nals such as mean RRI and HF and indirectly implies
that the proposed method for calculating biometric in-
dices under movement noise worked well.
Analysis on the Generalization to a New Worker.
To verify the generalizability of the proposed model
to new workers, we evaluated the performance in
leave-one-subject-out cross validation. The model
was trained with nine subjects’ data and tested with
the remaining subject’s data. We repeated this evalu-
ation nine times by changing the subject whose data
were used for the test. Note that we excluded one sub-
ject’s data from testing since the ETG data of the sub-
ject were completely missing. This was because the
subject could not wear the ETG due to an eye sight
problem.
We report the averaged results of all the nine valid
subjects in Table 7. Note that the total number of tri-
als does not add up to nine because we excluded some
trials due to invalid data that could not be interpolated.
The overall accuracy decreased to 58.6%. This means
that the features used in this study have certain de-
pendencies on individual subjects, and it is difficult
to use a model trained with one subject’s data to es-
timate the human-error potential of another subject.
Finding more subject-independent features is one of
our future works. If this result is seen from the other
side, however, it means that we may be able to achieve
even better performance than the results in Table 1 if
we can collect sufficient training data from a worker
and build a customized model for that worker.
The accuracy of the binary classification also de-
creased, but it stayed relatively high, which was
71.4%, suggesting the model is somewhat effective
at least for the binary classification to some extent.
6 CONCLUSIONS
This study tackled on a new problem of estimating
human-error potential on the basis of wearable sen-
sors, aiming at reducing the human errors on a shop
floor. Unlike existing studies, we have attempted
to estimate the human-error potential in a situation
where a target person does not stay calm, which is
much more difficult as sensor noise significantly in-
creases. We proposed a novel formulation, in which
the human-error-potential estimation problem is re-
duced to a classification problem, and introduced a
new method that can be used for solving the classifi-
cation problem even with noisy sensing data. The ex-
perimental analysis demonstrated the effectiveness of
our method for estimating the human-error potential.
In addition, we found that ECG data played an im-
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
118
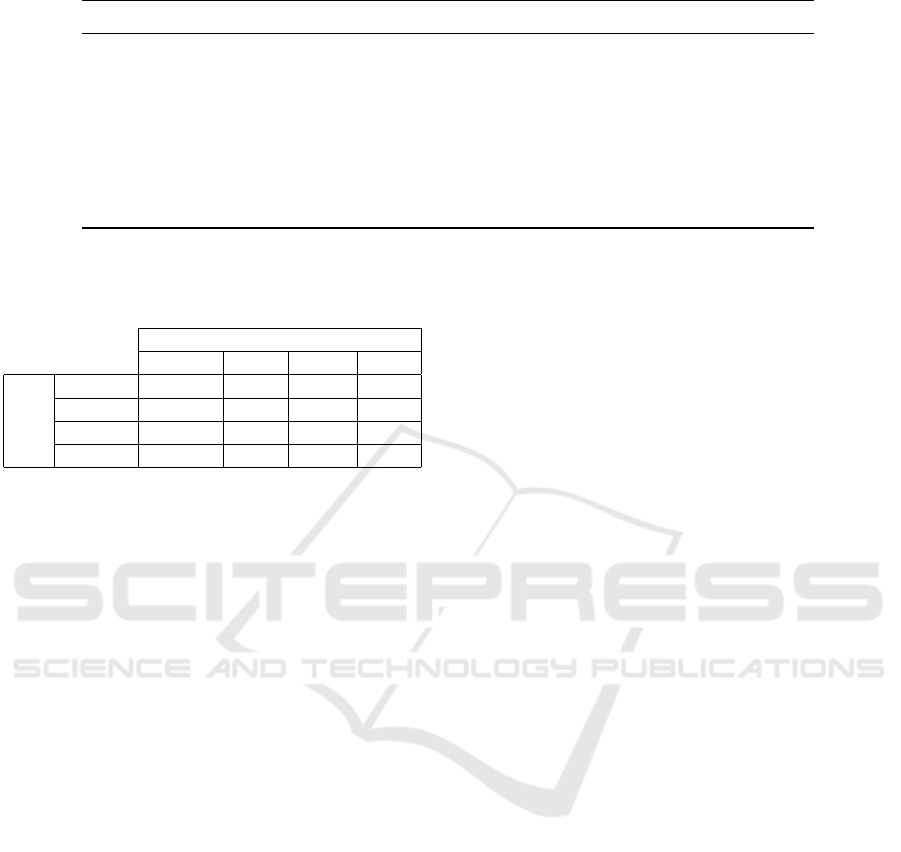
Table 6: Comparison of performances by different combinations of sensors.
# Fixed camera Smart watch EOG EEG ETG ECG 3 classes 2 classes
1 X 51.1 66.7
2 X 53.3 67.8
3 X X 56.7 66.7
4 X X X 52.2 67.8
5 X X X 53.3 70.0
6 X X X 53.3 72.2
7 X X X 68.5 75.8
8 X X X X X X 74.4 82.2
Table 7: Evaluation result of leave-one-subject-out cross
validation. Time: time-pressure condition, Multi: multi-
task condition, GT: ground truth.
Estimated
Normal Time Multi Total
GT
Normal 1.67 0.44 0.56 2.67
Time 0.67 1.22 0.44 2.33
Multi 0.56 0.56 1.67 2.78
Total 2.89 2.22 2.67 7.78
portant role in estimating human-error potential. Our
future work includes generalizing out method to new
workers by finding out subject-independent features.
REFERENCES
Akiba, T., Sano, S., Yanase, T., Ohta, T., and Koyama, M.
(2019). Optuna: A next-generation hyperparameter
optimization framework. In International conference
on knowledge discovery & data mining.
Bergstra, J., Bardenet, R., Bengio, Y., and K
´
egl, B. (2011).
Algorithms for hyper-parameter optimization. In 25th
annual conference on neural information processing
systems (NIPS).
Edmondson, A. C. (2004). Learning from mistakes is easier
said than done: Group and organizational influences
on the detection and correction of human error. The
Journal of Applied Behavioral Science, 40(1):66–90.
Hale, A., Stoop, J., and Hommels, J. (1990). Human er-
ror models as predictors of accident scenarios for de-
signers in road transport systems. Ergonomics, 33(10-
11):1377–1387.
Hawkins, F. H. (1987). Human Factors in Flight. Ashgate
Publishing.
Panicker, S. S. and Gayathri, P. (2019). A survey of ma-
chine learning techniques in physiology based mental
stress detection systems. Biocybernetics and Biomed-
ical Engineering, 39(2):444–469.
Pavllo, D., Feichtenhofer, C., Grangier, D., and Auli, M.
(2019). 3D human pose estimation in video with tem-
poral convolutions and semi-supervised training. In
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Ralph, B. C., Thomson, D. R., Cheyne, J. A., and Smilek,
D. (2014). Media multitasking and failures of at-
tention in everyday life. Psychological research,
78(5):661–669.
Ramzan, M., Khan, H. U., Awan, S. M., Ismail, A., Ilyas,
M., and Mahmood, A. (2019). A survey on state-of-
the-art drowsiness detection techniques. IEEE Access,
7:61904–61919.
Rasmussen, J. (1983). Skills, rules, and knowledge; signals,
signs, and symbols, and other distinctions in human
performance models. IEEE transactions on systems,
man, and cybernetics, SMC-13(3):257–266.
Reason, J. (1990). Human Error. Cambridge University
Press.
Sahayadhas, A., Sundaraj, K., and Murugappan, M. (2012).
Detecting Driver Drowsiness Based on Sensors: A
Review. Sensors, 12(12):16937–16953.
Sikander, G. and Anwar, S. (2019). Driver Fatigue Detec-
tion Systems: A Review. IEEE Transactions on Intel-
ligent Transportation Systems, 20(6):2339–2352.
Sun, F.-T., Kuo, C., Cheng, H.-T., Buthpitiya, S., Collins, P.,
and Griss, M. (2010). Activity-aware Mental Stress
Detection Using Physiological Sensors. In Interna-
tional conference on Mobile computing, applications,
and services, pages 282–301. Springer.
Sun, M., Tsujikawa, M., Onishi, Y., Ma, X., Nishino, A.,
and Hashimoto, S. (2018). A neural-network-based
investigation of eye-related movements for accurate
drowsiness estimation. In International Conference
of the IEEE Engineering in Medicine and Biology So-
ciety (EMBC), pages 5207–5210.
Swain, A. D. and Guttmann, H. E. (1983). Handbook of
human reliability analysis with emphasis on nuclear
power plant applications. NUREG/CR-1278, SAND
80-0200.
Tsujikawa, M., Onishi, Y., Kiuchi, Y., Ogatsu, T., Nishino,
A., and Hashimoto, S. (2018). Drowsiness estimation
from low-frame-rate facial videos using eyelid vari-
ability features. In International Conference of the
IEEE Engineering in Medicine and Biology Society
(EMBC), pages 5203–5206.
Uema, Y. and Inoue, K. (2017). JINS MEME Algorithm for
Estimation and Tracking of Concentration of Users. In
Proceedings of the ACM International Joint Confer-
ence on Pervasive and Ubiquitous Computing and the
Human-error-potential Estimation based on Wearable Biometric Sensors
119

ACM International Symposium on Wearable Comput-
ers (UbiComp/ISWC), pages 297–300.
Wang, H., Dragomir, A., Abbasi, N. I., Li, J., Thakor, N. V.,
and Bezerianos, A. (2018). A novel real-time driving
fatigue detection system based on wireless dry eeg.
Cognitive neurodynamics, 12(4):365–376.
Wijsman, J., Grundlehner, B., Liu, H., Hermens, H., and
Penders, J. (2011). Towards mental stress detection
using wearable physiological sensors. In 2011 An-
nual International Conference of the IEEE Engineer-
ing in Medicine and Biology Society, pages 1798–
1801. IEEE.
Williamson, J., Webb, R., Sellen, A., Runciman, W., and
Van der Walt, J. (1993). Human failure: an analysis of
2000 incident reports. Anaesthesia and intensive care,
21(5):678–683.
Yamada, Y. and Kobayashi, M. (2018). Detecting mental fa-
tigue from eye-tracking data gathered while watching
video: Evaluation in younger and older adults. Artifi-
cial intelligence in medicine, 91:39–48.
KDIR 2021 - 13th International Conference on Knowledge Discovery and Information Retrieval
120
