
Improving Image Filters with Cartesian Genetic Programming
Julien Biau
1
, Dennis Wilson
2 a
, Sylvain Cussat-Blanc
3 b
and Herv
´
e Luga
3 c
1
Kawantech, Toulouse, France
2
ISAE-SUPAERO, Toulouse, France
3
University of Toulouse, Toulouse, France
Keywords:
Genetic Programming, Cartesian Genetic Programming, Image Processing, Genetic Improvement.
Abstract:
The automatic construction of an image filter is a difficult task for which many recent machine learning meth-
ods have been proposed. However, these approaches, such as deep learning, do not allow for the filter to be
understood, and they often replace existing filters designed by human engineers without building on this ex-
pertise. Genetic improvement offers an alternative approach to construct understandable image filter programs
and to build them by improving existing systems. In this paper, we propose a method for genetic improvement
of image filters using Cartesian Genetic Programming. We introduce two operators for genetic improvement
which allow insertion and deletion of a node in the graph in order to quickly improve a given filter. These
new operators are tested in three different datasets starting from published or engineered filters. We show that
insertion and deletion operators improve the performance of CGP to produce newly adapted filters.
1 INTRODUCTION
The automatic construction of image filters through
machine learning has led to a number of novel appli-
cations. A common algorithm for this problem type
is deep convolutional neural networks which learn a
sequence of parameterized filters and which can to-
tal millions of parameters (He et al., 2016). While
the performance of these methods on large datasets
is impressive, surpassing human performance on vi-
sual recognition tasks (He et al., 2015), an impor-
tant obstacle in the application of these models is
their lack of interpretability. Furthermore, these sys-
tems are often used to replace systems designed by
human experts and are unable to benefit from com-
puter vision expertise. Previous work have been pub-
lished in which Genetic Algorithms are used to im-
prove the appearance and the visual quality of images
characterized by a bimodal gray level intensity his-
togram, by strengthening their two underlying sub-
distribution (Rundo et al., 2019). Additional work
have been done using genetic programming in the
field of video change detection to automatically se-
lect the best algorithms, combine them in different
a
https://orcid.org/0000-0003-2414-0051
b
https://orcid.org/0000-0003-1360-1932
c
https://orcid.org/0000-0001-8675-197X
ways, and perform the most suitable post-processing
operations on the outputs of the algorithms (Bianco
et al., 2017). Finally, a system for the automatic gen-
eration of computer vision algorithms at interactive
frame rates using GPU accelerated image process-
ing has been developed using genetic programming
(Ebner, 2009) and work have been done to evolve ob-
ject detectors using GPU processing (Ebner, 2010).
Genetic programming offers an attractive alternative
for this machine learning task. By combining low-
level and high-level image processing functions, a fil-
ter can be constructed which is fully understandable
and auditable. The set of functions can be chosen
by experts to meet computational or legibility require-
ments and can build on expert functions like those in
the OpenCV
1
library used in this work. Furthermore,
existing image filters can be formulated as starting
points for optimization; genetic improvement of soft-
ware has demonstrated that evolution can build upon
human-designed programs to improve their efficiency
and fix bugs (Arcuri and Yao, 2008). This allows for
a final program which is higher performing than the
original human-designed code, but which remains un-
derstandable and explainable by human experts.
In this work, we use Cartesian Genetic Program-
ming (CGP) (Miller, 1999), a popular form of graph
1
https://opencv.org/
Biau, J., Wilson, D., Cussat-Blanc, S. and Luga, H.
Improving Image Filters with Cartesian Genetic Programming.
DOI: 10.5220/0010640000003063
In Proceedings of the 13th International Joint Conference on Computational Intelligence (IJCCI 2021), pages 17-27
ISBN: 978-989-758-534-0; ISSN: 2184-2825
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
17

genetic programming, to improve on existing image
filters and to generate new filters. In CGP, programs
are represented as graphs of functions, which allows
for encoding existing filters through modifying the
program graph. We propose novel genetic operators
specifically for genetic improvement in CGP, demon-
strating that inserting nodes into the program graph
can improve evolution based on filter accuracy. We
study standard CGP, CGP with a starting population
of experts, and the proposed mutation operators on a
set of image masking benchmarks, two from previ-
ous work on CGP (Leitner et al., 2012) and one new
benchmark on urban traffic. Our evolution allow to
quickly improve an image filter designed by a human
with basic knowledge.
This article is structured as follows. In Section 2,
we illustrate Cartesian Genetic Programming and its
application to image processing; we then review ge-
netic improvement. In Section 3, we describe the pro-
posed node insertion and node deletion operations for
genetic improvement with CGP. We present the image
processing tasks and experimental parameters in Sec-
tion 4, using tasks and image functions from existing
work in image processing using CGP. In Section 5,
we compare different evolutionary processes, starting
from random populations and from expert filters, and
using the proposed operators. We also study the re-
sulting image filters, demonstrating the transparency
of program graphs created by CGP. Finally, in Section
6, we discuss possible applications of this method and
define future directions for this research.
2 RELATED WORKS
This work builds on two extensive bodies of genetic
programming literature: Cartesian Genetic Program-
ming (Miller, 1999), specifically its application to im-
age processing and a study of possible genetic oper-
ators, and genetic improvement, the optimization of
expert-designed programs through evolution.
2.1 Cartesian Genetic Programming
Cartesian Genetic Programming (CGP) is a form of
Genetic Programming (GP) in which programs are
represented as directed, often acyclic graphs indexed
by Cartesian coordinates. CGP was invented by
Miller and Thomson (Miller et al., 1997; Miller, 1999;
Miller and Thomson, 2000) for use in evolving digi-
tal circuits, but has since been applied in a large num-
ber of domains (Miller, 2011). CGP is used in (Khan
et al., 2011) to evolve neural networks, in (Harding
et al., 2013) for object detection in image processing,
and in (Kalkreuth et al., 2016) for image noise reduc-
tion. Its benefits include node neutrality, being the
encoded parts of the genome that do not contribute to
the interpreted program, node reuse, and a fixed rep-
resentation that reduces program bloat (Miller, 2001).
A recent review of CGP is given in (Miller, 2019).
In CGP, functional nodes, defined by a set of
evolved genes, connect to program inputs and to other
functional nodes via their Cartesian coordinates. The
outputs of the program are taken from any internal
node or program input based on evolved output co-
ordinates. CGP nodes are arranged in a rectangular
grid of R rows and C columns. Nodes are allowed to
connect to any node from previous columns based on
a connectivity parameter L which sets the number of
columns back a node can connect to. In this work,
as in many others (Miller, 2019), R = 1, meaning all
nodes are in a single row.
The CGP genotype consists of a list of node genes;
each node in the genome encodes the node function,
the coordinates of the function inputs (here referred
as Connection 0 and Connection 1), and optionally
parameters for the node function. Connection 0 and
Connection 1 can be outputs of previous nodes or pro-
gram inputs. Finally, the end of the genome encodes
the nodes which give the final program output. By
tracing back from these output nodes, a single func-
tion can be derived for each program output, offering
a concise and legible program representation.
The genes in CGP are optimized through using
the 1+λ algorithm. A population of λ individuals
are randomly generated and evaluated on a test prob-
lem. Evaluation is performed by decoding the pro-
gram graph from the individual genotype and apply-
ing the program to a specific problem such as image
masking, as in this work. The best individual based on
this evaluation is retained for the next generation. A
mutation operator is applied to this individual to cre-
ate λ new individuals; in CGP, the mutation operator
randomly samples a subset of new genes from a uni-
form distribution. This new population is evaluated
and the best individual is retained for the next genera-
tion; this iterative process continues until a configured
stopping criterion is satisfied.
2.2 Cartesian Genetic Programming for
Image Processing
An important choice in using CGP is the set of possi-
ble node functions. In the original circuit design ap-
plication, the node functions were logic gates such as
AND and NOR. Applications of CGP in game play-
ing and data analysis use a standard set of mathemat-
ical functions such as x + y, x ∗ y, and cos(x) for a
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
18

node with inputs x and y. Function sets must be de-
fined such that outputs of any node will be valid for
another node; in mathematical functions, this is often
guaranteed by restraining the domain and range of the
functions between -1 and 1.
Cartesian Genetic Programming for Image Pro-
cessing (CGP-IP) is an adaption of CGP which uses
image processing functions and which applies pro-
grams directly to images (Harding et al., 2006). The
inputs and outputs of the evolved functions are images
which allows for consistency between node functions;
each node function is defined to input an image of a
fixed size and output an image of the same size. CGP-
IP has previously used a set of 60 functions (Hard-
ing et al., 2012b) from OpenCV, a standard and open-
source image processing library.
In previous work (Harding et al., 2006), CGP-IP
has used an island population distribution algorithm.
In this method, multiple populations compete inside
“islands” which are independent 1 + λ evolutionary
algorithms. A migration interval parameter dictates
the frequency of expert sharing between the islands,
allowing for synchronization of the best individual
across islands. Island models have been demonstrated
as an alternative to the Genetic Algorithm and aid
in preserving genetic diversity (Whitley et al., 1998).
Their use in CGP-IP has shown improvement com-
pared to the 1 + λ algorithm.
CGP-IP individuals are evaluated by applying the
evolved filter to a set of images, comparing them to
target images, and computing a difference metric be-
tween the output image from the evolved filter and
the target, such as the mean error or Matthews Cor-
relation Coefficient (MCC) (Matthews, 1975). In this
paper, we use MCC, which measures the quality of bi-
nary classification and has been showed particularly
adapted to classification tasks using CGP (Harding
et al., 2012a). Calculations are based on the confusion
matrix, which is the count of the true positives (TP),
false positives (FP), true negatives (TN) and false neg-
atives (FN):
mcc =
T P ∗ T N − FP ∗ FN
p
(T P + FP)(T P + FN)(T N +FP)(T N + FN)
(1)
A MCC with a score of 1 corresponds to a per-
fect classification, 0 to a random classifier, and -1 to
a fully inverted classification. Our fitness function for
evolution is defined as follows:
f itness = 1 − mcc. (2)
In this work, evolution is therefore used to min-
imize the objective function, searching for programs
with a higher MCC.
2.3 Genetic Improvement
Genetic Improvement (GI) is a relatively recent field
of software engineering research that uses search to
improve existing software. Using handwritten code
as a starting point, GI searches the space of program
variants created by applying mutation operators. The
richness of this space depends on the power and ex-
pressivity of the mutation operators, which can mod-
ify existing code by changing functions or parame-
ters, add new code, and, in some cases, remove parts
of a program. Over the past decade, the GI field
has greatly expanded and current research on GI has
demonstrated many potential applications. Genetic
improvement has been used to fix software bugs (Ar-
curi and Yao, 2008; Langdon and Harman, 2015),
to drastically speed up software systems (Langdon
and Harman, 2015; White et al., 2011), to port a
software system between different platforms (Lang-
don and Harman, 2010), to transplant code features
between multiple versions of a system (Petke et al.,
2014), to grow new functionalities (Harman et al.,
2014) and more recently to improve memory (Wu
et al., 2015) and energy usage (Bruce et al., 2015).
The majority of Genetic Improvement work uses
Genetic Programming to improve the programs un-
der optimisation (Arcuri and Yao, 2008; Langdon and
Harman, 2010; Langdon and Harman, 2015; Petke
et al., 2014; White et al., 2011). In most methods, ap-
plying GI to an existing program is done by encoding
the existing program within a GP tree and then com-
puting the corresponding genome. GP mutation op-
erators are applied to the encoded program to gener-
ate adjacent programs. For this purpose, the program
encoding and operators must be defined both to be
suited to the initial program to be improved and with
additional functions to allow evolution to improve the
functional graph. The fitness used during the evolu-
tionary optimization of the program can be based on
various metrics, such as program length, efficiency,
relevance to given test cases, or others (Arcuri and
Yao, 2008; Langdon and Harman, 2010; White et al.,
2011).
In this work, we propose operators for genetic im-
provement in CGP. To our knowledge, this is the first
use of CGP for GI, as the majority of GI literature uses
tree representations of programs instead of graphs.
The proposed node insertion and deletion mutation
operators are similar to existing mutation operators
for tree-based GI but are studied here in the context
of graph evolution.
Improving Image Filters with Cartesian Genetic Programming
19

3 GENETIC IMPROVEMENT IN
CGP-IP
In this section, we deal with insertion and deletion
operators specifically designed for GI with CGP. In
the standard CGP,the evolution is only based on the
injection of random mutation to node genes which
is equivalent to connections or functions. Genomes
are of constant sizes and adding and/or removing
functional nodes inside the graph can be difficult for
the evolution to finish. To this end, previous work
has proposed self-modifying genomes (Harding et al.,
2011) which use functions which can add or remove
nodes but only while the graph is executing. In our
proposal we do insertion and deletion of node using
mutation operators in order to change the size of the
graph during it’s evolution. These operators are de-
signed to maintain the active subgraph of a program,
i.e. they are not destructive. Source code of the im-
plementation in Python for our CGP-IP can be found
here
2
.
A mutation consists of applying one of the three
following operators: node insertion, node deletion or
standard parameter modification using a uniform dis-
tribution. The node operators have configurable mu-
tation rates r
ins
and r
del
corresponding to the proba-
bility of the application of these mutation operators.
If one of these structural operators is applied, it will
be the only mutation performed; otherwise, standard
parameter modification mutation occurs. In this work,
r
ins
= 0.1 and r
del
= 0.1 for all experiments.
3.1 Node Insertion
The node insertion operator adds a new node between
two connected nodes in the active graph of a CGP in-
dividual. To allow for node insertion, we change the
total possible graph length of a CGP individual, R ∗ C
or the number of columns C in this case, and adapt this
value during evolution. In order to preserve the struc-
ture of the program, the connections of other nodes
in the genome are adjusted after a node insertion. As
described in Algorithm 1 and illustrated in Figure 1,
the connection genes of all nodes after the inserted
node are increased by 1. This preserves the exist-
ing connections in the graph and simply inserts the
new node between two previously connected random
nodes. We study two possible insertions: using an
identity (NOP) function, this action does not immedi-
ately change the program graph, and using a random
function, which can.
2
https://github.com/julienbiau/CGP-IP-GI
Algorithm 1: Insertion of a node with a random function.
Data: nodes is an array containing all nodes
NOP insertion is a boolean
Result: node inserted at position index
index = getRandomActiveNode();
nodes.insert(index,copyNode(nodes[index]));
// connection 0 of next node is linked to
// inserted node
nodes[index+1].conn0 = 1;
// connection 1 of next node is increasing by
// 1 to maintain his links after insertion
nodes[index+1].conn1 = nodes[index+1].conn1
+ 1;
if NOP insertion then
// set a NOP function
nodes[index].function = NOP;
else
// set a Random function
nodes[index].function =
getRandomFunction();
end
for i ← index to nodes.length do
if i − nodes[i].conn0 < index then
nodes[i].conn0 = nodes[i].conn0 + 1;
end
if i − nodes[i].conn1 < index then
nodes[i].conn1 = nodes[i].conn1 + 1;
end
end
for i ← 0 to out puts.length do
if nodes.length − out puts[i] < index then
outputs[i] = outputs[i]+1;
end
end
Figure 1: Graph with an random node N inserted at index 4.
3.2 Node Deletion
The node deletion operator removes a node from the
active graph of a CGP individual, as shown in Fig-
ure 2. After a node deletion we adjust the rest of the
genome to ensure that other parts of the graph are not
impacted. Specifically, as described in Algorithm 2,
all nodes which connected to the removed node are
in turn connected to the Connection 0 input of the
removed node, and all nodes after the selected node
have their connection genes decremented by 1.
These operators does induce a global benefit to the
CGP evolution by growing a topology over the evolu-
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
20

Algorithm 2: Deletion of a node.
Data: nodes is an array containing all nodes
Result: node deleted at position index in the
graph
if active nodes.length > 1 then
index = getRandomActiveNode();
for i ← 0 to out puts.length do
if nodes.length − out puts[i] == index
then
outputs[i] =
outputs[i]+nodes[index].conn0;
end
end
for i ← 0 to active nodes.length do
if i − nodes[i].conn0 == index then
nodes[i].conn0 = nodes[i].conn0 +
nodes[index].conn0;
end
end
for i ← index to nodes.length do
if i − nodes[i].conn0 < index then
nodes[i].conn0 = nodes[i].conn0 -
1;
end
if i − nodes[i].conn1 < index then
nodes[i].conn1 = nodes[i].conn1 -
1;
end
end
nodes.remove(index);
end
Figure 2: Graph with a deletion of node 2.
tion instead of searching in a graph with a fixed max-
imum size. However, we more specifically study this
in the case of Genetic Improvement, where existing
image filters can be improved through the node inser-
tion and deletion operators.
4 EXPERIMENTS
To evaluate the insertion and deletion operators in the
context of genetic improvement, we study the effect
of using filter made using human expert as the starting
point and using the proposed structural mutation op-
erators. Specifically, we compare the following con-
figurations:
Baseline: standard CGP-IP. Starting chromosome is
randomly defined at the beginning. Insertion and
deletion mutations are disabled.
Fixed Size: standard CGP-IP, but active nodes in the
initial population are exclusively composed of func-
tion extracted from an expert filter and are positioned
at the beginning of the graph. Inactive node are ran-
domly decided after active nodes in the graph. Inser-
tion and deletion mutations are disabled.
Fixed Size with NOP: standard CGP-IP, but active
nodes in the starting population are composed of
functions extracted from an expert filter and are in-
tertwined with NOP function between each Connec-
tion 0 input. For example, if the filter contains 10
functions, the initial genome will be composed of 20
actives nodes (10 nodes with functions and 10 NOP
nodes). Inactive nodes are randomly added after the
active nodes. Insertion and deletion operators are dis-
abled.
Adapting with NOP: The initial genome is built as
in the fixed size method, ie with an expert individ-
ual. Insertion and deletion operators are enabled. If
an insertion occurs, only NOP function are inserted.
Adapting with Random: The initial genome is built,
as can be seen in the fixed size method. Insertion and
deletion operators are enabled. If an insertion occurs,
the function of the inserted node is randomly selected
from the function library.
Adapting, No Expert: Starting chromosome is ran-
domly defined at the beginning. Insertion and dele-
tion mutations are enabled. If an insertion occurs,
the function of the inserted node is randomly selected
from the function library.
These configurations allow for detailed and inde-
pendent study of the two proposed CGP-IP improve-
ments in this work: genetic improvement of exist-
ing image filters and structural mutation operators of
node insertion and deletion. The fixed size configu-
rations isolate the possible benefit of building atop al-
ready designed image filter individuals, with the dif-
ference that the expert experience is encoded in the
starting genome. The three adapting configurations
allow for study of the node insertion and deletion
operators, in particular for their use for genetic im-
provement. Once again, the distinction between addi-
tional random genetic information and NOP is made;
for the node insertion operator, this difference deter-
mines if the functional phenotype of the CGP-IP indi-
vidual is modified by node insertion (adapting with
random) or if the insertion mutation is only struc-
tural (adapting with NOP). Finally, the adapting, no
expert configuration allows for independent study of
the benefits of the node insertion and deletion opera-
Improving Image Filters with Cartesian Genetic Programming
21
tors when starting from random genes, as in baseline
CGP-IP.
4.1 CGP-IP Parameters
In this work, we have used the following parameters
for CGP-IP:
• R: the number of rows in CGP is 1
• C: the number of columns in CGP is set to 50
for all experiments, but can change with the node
addition and deletion operators
• r
mut
: mutation rate for each gene is 0.25
• r
ins
: node insertion mutation operator rate is 0.1
• r
del
: node deletion mutation operator rate is 0.1
• Number of islands: the number of parallel 1 + λ
evolutions is 4
• λ: the population size on each island is 4
• Synchronisation interval between islands: number
of generations before islands compare their fitness
to update them with the best chromosome is 20
• Number of generations: 1000 for the Mars task
and 2000 for the Lunar and Urban Traffic tasks
Each node of the graph is encoded with 8 param-
eters (see table 1). The function allele represents an
index in the list of image processing functions. The
second allele, Connection 0, is a connection with a
previous node where output will be taken as input for
the function. The third allele, Connection 1, is a con-
nection with a previous node where output will be
taken as input for the function (not all functions used
connection 1). The fourth, fifth and sixth alleles, Pa-
rameters 0, 1 and 2, are real numbers that are the first,
second and third parameters of the function. These al-
leles are not necessarily used as not all functions have
three parameters. For example, Gabor Filter parame-
ters are only used with Gabor filter functions. During
the evolution process, mutation can occur either on
function index, on connection or on parameters.
Table 1: Parameters of a node.
Parameter Type Range
Function INT # of function
Connection 0 INT # of node/input
Connection 1 INT # of node/input
Parameter 0 REAL [−∞, ∞]
Parameter 1 INT [-16, 16]
Parameter 2 INT [-16, 16]
Gabor Filter Freq. INT [0, 16]
Gabor Filter Orien. INT [-8, 8]
4.2 Image Processing Functions
The function we designed herewith is based on the
CGP-IP function set (Harding et al., 2006). How-
ever, new functions have been added to the OpenCV
library since this previous work. In addition to the
existing list of image processing function (Harding
et al., 2012b) already in CGP-IP, we have added the
OpenCV functions watershed and distance transform.
4.3 Datasets
In this work, we aim to construct an image filter which
provides a binary classification of an input image, al-
lowing for the recognition of a desired object type.
We use three different datasets for this task: images
from Mars rovers, which was used in (Leitner et al.,
2012), a similar Lunar dataset, and an Urban Traffic
dataset, which is a new application for CGP-IP.
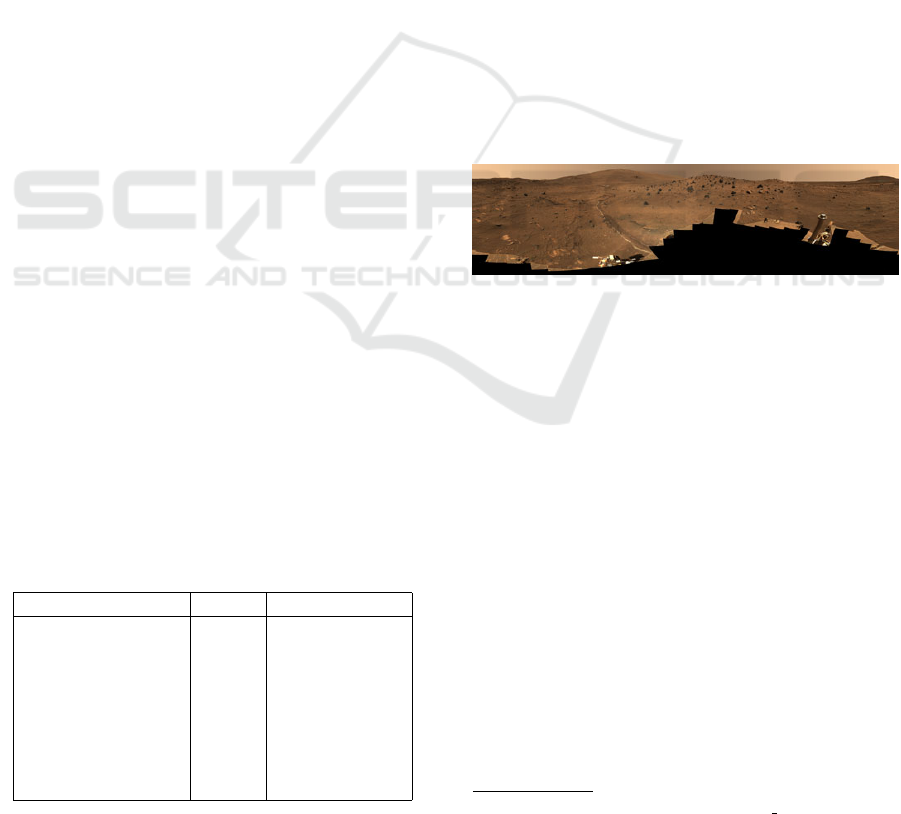
4.3.1 Mars Dataset
The Mars dataset is based on 5 images extracted from
1449 images that compose the McMurdo Panorama
(Figure 3) taken by the rover Spirit on Mars
3
.
Figure 3: Full image from the Spirit rover.
The purpose of applying our algorithm on this
dataset is to extract rocks from the images. Input im-
ages (Figure 4.A) have a resolution of 347x871 pix-
els and show rocks on the martian terrain. The target
output is a binary mask (Figure 4.B), which identifies
pixels with rocks as 1 and other pixels as 0. Figure
4.C display the overlay result.
For this dataset, we use an expert filter proposed
by (Leitner et al., 2012), described in Listing 1 and
displayed in Figure 5. This filter was generated us-
ing CGP-IP on the same dataset and has already a
high accuracy, this allows us to study if further im-
provement using node addition and deletion is possi-
ble. For this dataset, we use 1000 generations for evo-
lution and run 6 independent trials; given the starting
point, 1000 generations was determined to be enough
for establishing a convergence.
3
http://pancam.sese.asu.edu/mcmurdo v2.html
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
22

A : Input B : Output C : Overlay
Figure 4: An example from the Mars image dataset. The
objective is to identify the rocks in the image.
def b a s e _ chr o m o s ome ( in pu t ):
# in pu t is co m po s ed of R [0] , G [1] ,
B [2] , H [3] , S [4] , V [ 5]
no de 0 = cv2 . G a us s i a nBl u r ( inp ut
[5] ,(3 ,3) )
no de 1 = np . sqrt ( n ode0 )
no de 2 = i np ut [4]
no de 3 = cv2 . u ns h a rp e n ( no de2 ,13 )
no de 4 = n od e1 *7. 00 1
no de 5 = cv2 . b i l ate r a l fil t e r ( n ode4
,9)
no de 6 = n o rma l ize ( node 5 )
no de 7 = n od e3 *4 .0 3
no de 8 = n od e7 + no de 6
no de 9 = cv2 . b i l ate r a l fil t e r ( n ode8
,11)
no de 1 0 = cv2 . t hr e s ho l d ( node9
,1 77 . 24 ,25 5)
re tu r n nod e10
Listing 1: Python encoding of the Mars gene base.
4.3.2 Lunar Dataset
The Lunar dataset
4
is based on 5 images extracted
from 9,766 realistic renders of rocky lunar land-
scapes, and their segmented equivalents (the 3 classes
are the sky, smaller rocks, and larger rocks). This
dataset was created by Romain Pessia and Genya
Ishigami of the Space Robotics Group
5
, Keio Univer-
sity, Japan. As with the Mars dataset, the new pur-
pose of using this dataset here is to extract rocks from
the images. The input images have a resolution of
720x480 pixels (Figure 6.A) and the target output im-
ages (Figure 6.B) classify the large rocks in the image.
4
https://www.kaggle.com/romainpessia/artificial-lunar-
rocky-landscape-dataset
5
http://www.srg.mech.keio.ac.jp/index en.html
Figure 5: Graph of the Mars gene evolved with CGP-IP
(Leitner et al., 2012).
A : Input B : Output
Figure 6: An example from the Lunar image dataset.
We use the same filter proposed by (Leitner et al.,
2012) and used on the Mars dataset for this dataset
(5). This allows us to study the adaptation of a filter
from one dataset to another, where the size and color
of the image changes, and where the target landscape
is very different. For this dataset, evolution is run for
2000 generations on 6 independent trials.
4.3.3 Urban Traffic
To achieve this new purpose, we apply CGP-IP to
identifying moving objects in a city landscape. Using
this dataset allows to build a filter that extracts and
follows the specific objects in the video. To do so, the
filter needs to find each objects that exhibit a move-
ment between individual frame in a frame to frame
comparison. The dataset was made using video from
urban traffic livestream cameras
6
and output masks
were generated using Mask-RCNN (He et al., 2018)
to keep only relevant objects. We use videos of 5 min-
6
https://camstreamer.com/live/streams/14-traffic
Improving Image Filters with Cartesian Genetic Programming
23
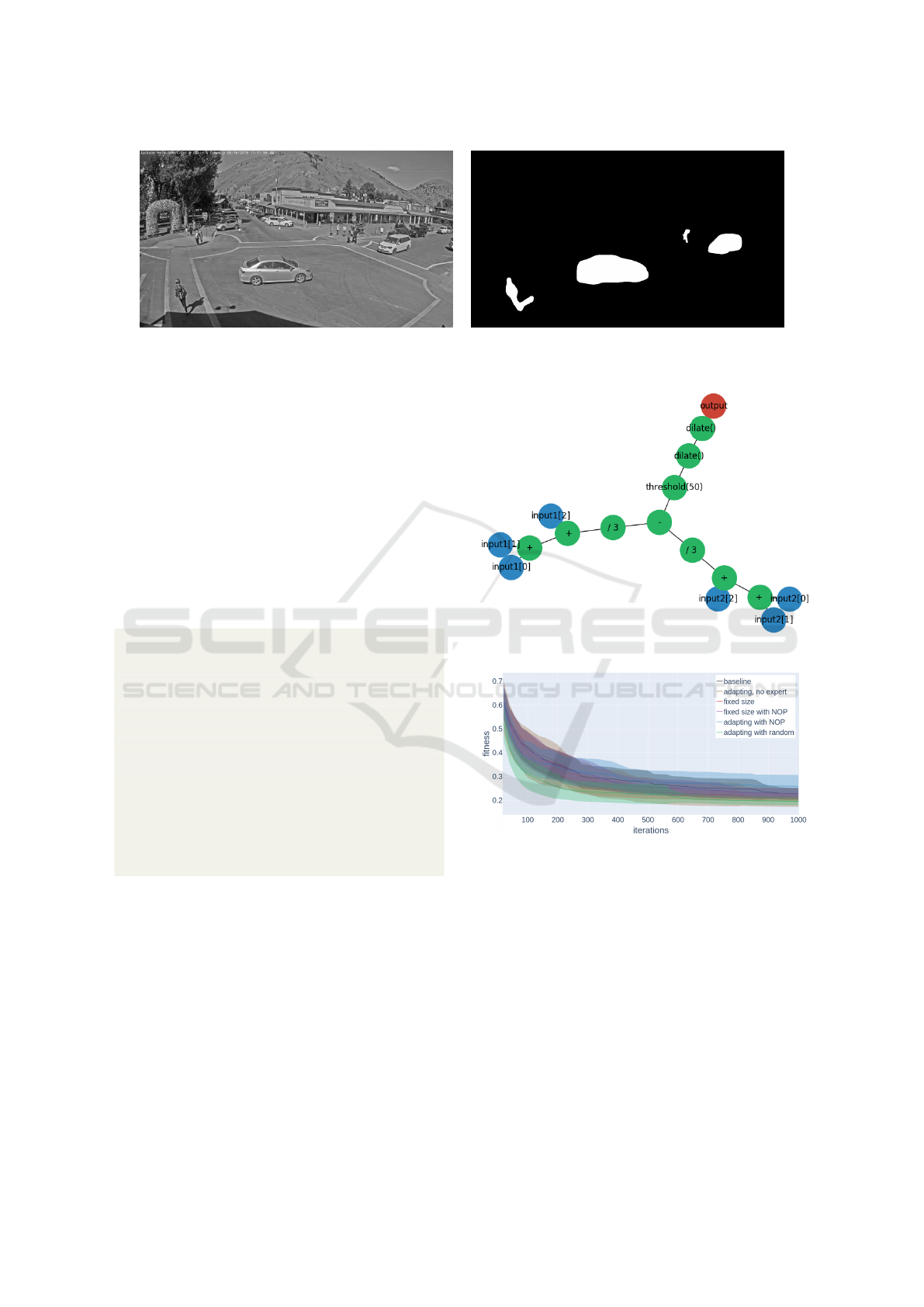
A : Input B : Output
Figure 7: Example from the Urban Traffic image dataset.
utes in length, with 16 bit RGB color and a resolution
of 1024x576 pixels. The images are then converted
into grayscale for input and a sequence of 5 images
are processed together by the evolved filter (Figure
7.A). The target classification (Figure 7.B) identifies
large objects such as pedestrians and vehicles.
The expert filter used in this dataset was designed
by engineers. It works by first subtracting the pre-
vious image from the current one, then by applying
erode and dilate function to remove noise. The filter
is detailed in Listing 2 and shown in Figure 8. For this
dataset, evolution was run for 2000 generations over
6 independent trials.
def b a s e _ chr o m o s ome ( inpu t1 , inp ut 2 ):
# in p ut 1 is co m pos ed of R [0] , G [1] ,
B [ 2]
# in p ut 2 is co m pos ed of R [0] , G [1] ,
B [ 2]
no de 0 = i np u t1 [0] + i n pu t1 [1]
no de 1 = n od e0 + in p ut 1 [2]
no de 2 = n od e1 / 3
no de 3 = i np u t2 [0] + i n pu t2 [1]
no de 4 = n od e3 + in p ut 2 [2]
no de 5 = n od e4 / 3
no de 6 = n od e5 - no de 2
no de 7 = cv2 . t hr e s ho l d ( no de6 ,50 ,255)
no de 8 = cv2 . di l at e ( no de7 )
no de 9 = cv2 . di l at e ( no de8 )
re tu r n node9
Listing 2: Python encoding of the Urban Traffic gene base.
5 RESULTS
The results over the three datasets is dealt with here-
after. CGP-IP is able to construct image filters which
accurately classify the desired objects in all cases,
but the adaptive structure configurations show a clear
benefit when compared with baseline CGP-IP.
Figure 9 shows evolution over 2000 iterations on
the Mars dataset. Adapting with random converges
more rapidly and towards better classification than the
Figure 8: Graph of the Urban Traffic gene, human designed.
Figure 9: Average and standard deviation of fitness accu-
racy for Mars over 40 runs.
other methods. The other configurations show little
difference. Adapting with NOP ends with the worst
fitness, with an accuracy inferior to both adapting
with random and fixed size with NOP. This demon-
strates that adding nodes alone is not advantageous;
rather, the addition of nodes which change the pheno-
type program should be preferred.
The similarity of the results with the Mars dataset
is not a surprise given that the expert individual was
the result of a previous CGP-IP experiment. However,
it is notable that both baseline and adapting, no ex-
pert, which do not use this starting point, converge to
match the other individuals.
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
24
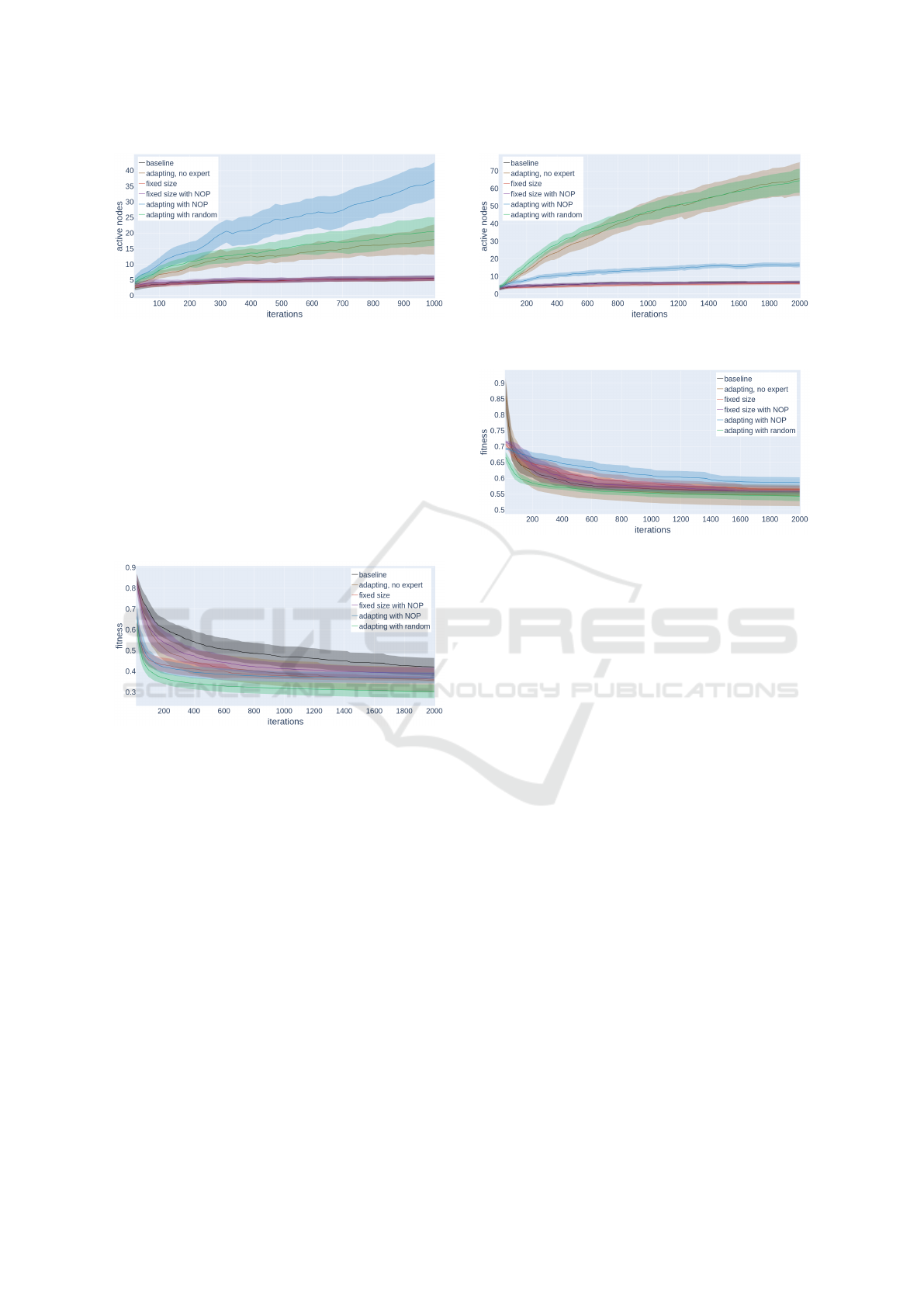
Figure 10: Average and standard deviation of actives nodes
for Mars overs 40 runs.
Figure 10 displays the active graph size for the
Mars dataset. baseline, fixed size and fixed size with
NOP slowly increase to 5/6 actives nodes. For adapt-
ing with NOP, the actives nodes constantly increase
throughout evolution. Adapting with random and
adapting, no expert converge to similar size due to
using the same addition operation. It is clear that the
insertion operation results in a larger graph than uni-
form random mutation, even though there is a deletion
operator also present.
Figure 11: Average and standard deviation of fitness accu-
racy for Lunar overs 40 runs.
Figure 11 displays evolution over 2000 genera-
tions on the Lunar dataset. Adapting with random
performs better and quicker than five others with a
better variance and ttest p-value of less than 1e
−5
.
Baseline starts slower than the five other experiments
with a higher variance and worse final performance.
While adapting, no expert does eventually converge
to similar accuracy as other configurations which start
with an expert, the benefit of starting with an expert
is demonstrated through the suboptimal performance
of baseline. It should also be noted that the expert
used on this dataset was initially trained on the Mars
dataset,this does show that a filter is efficiently appli-
cable from one task to another.
Figure 12 shows that baseline, fixed size and
fixed size with NOP increase slowly to 7 actives
nodes. For this dataset, the adaptive configurations
with random function insertion grow larger than when
adding NOP, which is the opposite of the node size
Figure 12: Average and standard deviation of actives nodes
for Lunar overs 40 runs.
Figure 13: Average and standard deviation of fitness accu-
racy for Urban Traffic over 40 runs.
behavior for the Mars dataset. The adapting graphs
reach enormous sizes after 2000 generations, oversiz-
ing the initial maximum graph size settled to 50.
Figure 13 shows that the evolution of the fitness
function over 2000 iterations on the Urban Traffic
dataset. Adapting with random outperforms and
converges faster than baseline, fixed size, fixed size
with NOP and adapting with NOP (p-value of Stu-
dent t-test <1e
−5
both at iteration 300 as well as at
iteration 2000). It is important to note that the stan-
dard deviation over the 40 runs is somewhere small
with this method in comparison to other methods.
This should be interpreted as proof that the adapting
with random not only does perform better than other
but also that to solution of similar quality indepen-
dently of the randomness of the evolutionary process.
Adapting, no expert performs slower than adapting
with random but achieve a better fitness after 700 it-
erations and continue to decrease. This demonstrates
a potential disadvantage of starting with an expert in-
dividual, which is early convergence based on this in-
dividual and lack of exploration when compared to a
random initialization.
Figure 14 shows that fixed size and fixed size with
NOP reduces the graph cardinal down to 7 active
nodes. Here, as in the Lunar dataset, the random node
insertion configurations continue to grow throughout
evolution although their is a clear compression step
visible after nearly 500 generations for adapting, no
expert this in turn does demonstrate the benefit of the
Improving Image Filters with Cartesian Genetic Programming
25

Table 2: Average fitness and standard deviation of each experiment on each dataset.
Lunar Mars Urban traffic
Baseline 0.42 (0.09) 0.23 (0.05) 0.56 (0.02)
Adapting, no expert 0.36 (0.12) 0.21 (0.08) 0.55 (0.07)
Fixed sized 0.36 (0.02) 0.21 (0.04) 0.56 (0.02)
Fixed size with NOP 0.39 (0.05) 0.23 (0.04) 0.56 (0.01)
Adapting with NOP 0.37 (0.05) 0.26 (0.1) 0.59 (0.03)
Adapting with random 0.3 (0.07) 0.2 (0.03) 0.54 (0.03)
Figure 14: Average and standard deviation of actives nodes
for Urban Traffic over 40 runs.
deletion operator.
To summarize: each experiment (Table 2), adapt-
ing with random performs better and quicker than
standard CGP-IP with a lower variance and a ttest
p value less than 1e-5. Our evolution with random
function outperform the standard CGP-IP (baseline)
and fixed size with NOP in each case. Adapting
with NOP converges a bit faster but ends with an in-
ferior accuracy. As expected, the baseline chromo-
some converge slower with a higher variance than the
others. The proposed mutation operators (insertion of
NOP and random function) greatly increase the num-
ber of active nodes in the graph unlike standard CGP-
IP, where the number of active nodes is relatively sta-
ble. With Urban traffic dataset, adapting, no expert
performs better than adapting with random after 700
iterations this emphases that it is important to start
from an efficient base chromosome, otherwise genetic
improvement will be outperformed by the classic evo-
lution done with a random chromosome.
6 CONCLUSION
In this paper, we propose mutation operators for CGP-
IP for use in the context of genetic improvement. To
this end, our algorithm adds new functions in a graph
and keeps existing connections intact. We have tested
CGP-IP with these operators on 3 datasets and have
shown that it consistently outperforms standard CGP-
IP, increasing the convergence speed and final accu-
racy on all datasets.
Our method has the additional interest to slowly
but constantly increase the number of active nodes.
This allows evolution to access new research space
leading to better accuracy. This conclusion is in line
with previous work on incremental growth of neural
networks (Stanley and Miikkulainen, 2002) or gene
regulatory networks (Cussat-Blanc et al., 2015). For
example, the NeuroEvolution of Augmenting Topolo-
gies (NEAT) (Stanley and Miikkulainen, 2002) al-
gorithm demonstrates that increasing program com-
plexity throughout search can improve the optimiza-
tion. That is consistent with the results in this work,
both when starting with an expert-designed image fil-
ter and when using a random initial population.
An avenue for exploration with this method is
the reduction of graph complexity over time. While
the node insertion operators are clearly beneficial for
evolution, they reintroduce the problem of bloat into
CGP. We aim to study the different mutation rates to
see if large graphs can be automatically avoided in
evolution.
In practice, this method can be used to converge
quickly to a better solution using a efficient human de-
signed filter than when starting from a random chro-
mosome. This allows for application of this method
which builds on existing image processing pipelines,
especially those which use CGP-IP.
REFERENCES
Arcuri, A. and Yao, X. (2008). A novel co-evolutionary
approach to automatic software bug fixin. CEC, pages
162–168.
Bianco, S., Ciocca, G., and Schettini, R. (2017). Combina-
tion of video change detection algorithms by genetic
programming. IEEE Transactions on Evolutionary
Computation, 21(6):914–928.
Bruce, B. R., Petke, J., and Harman, M. (2015). Reduc-
ing energy consumption using genetic improvement.
GECCO.
Cussat-Blanc, S., Harrington, K., and Pollack, J. (2015).
Gene regulatory network evolution through augment-
ing topologies. IEEE Transactions on Evolutionary
Computation, 19(6):823–837.
ECTA 2021 - 13th International Conference on Evolutionary Computation Theory and Applications
26

Ebner, M. (2009). Engineering of computer vision algo-
rithms using evolutionary algorithms. In Blanc-Talon,
J., Philips, W., Popescu, D., and Scheunders, P., ed-
itors, Advanced Concepts for Intelligent Vision Sys-
tems, pages 367–378, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Ebner, M. (2010). Evolving object detectors with a gpu
accelerated vision system. In Tempesti, G., Tyrrell,
A. M., and Miller, J. F., editors, Evolvable Systems:
From Biology to Hardware, pages 109–120, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Harding, S., Graziano, V., Leitner, J., and Schmidhuber, J.
(2012a). Mt-cgp: Mixed type cartesian genetic pro-
gramming. Genetic and Evolutionary Computation
Conference.
Harding, S., Leitner, J., and Schmidhuber, J. (2006). Ge-
netic programming theory and practice. Journal of
Intelligent and Robotic Systems.
Harding, S., Leitner, J., and Schmidhuber, J. (2012b).
Cartesian genetic programming for image processing.
Genetic Programming Theory and Practice X.
Harding, S., Leitner, J., and Schmidhuber, J. (2013). Carte-
sian Genetic Programming for Image Processing. Ge-
netic Programming Theory and Practice X, pages 31–
44.
Harding, S., Miller, J., and Banzhaf, W. (2011). Self-
modifying cartesian genetic programming. Natural
Computing Series.
Harman, M., Jia, Y., and Langdon, W. (2014). Babel pid-
gin: Sbse can grow and graft entirely new functional-
ity into a real world system. SSBSE Challenge, pages
247–252.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2018).
Mask r-cnn.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delving deep
into rectifiers: Surpassing human-level performance
on imagenet classification.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Kalkreuth, R., Rudolph, G., and Krone, J. (2016). More ef-
ficient evolution of small genetic programs in Carte-
sian Genetic Programming by using genotypie age.
In 2016 IEEE Congress on Evolutionary Computation
(CEC), pages 5052–5059. IEEE.
Khan, G. M., Miller, J. F., and Halliday, D. M. (2011). Evo-
lution of cartesian genetic programs for development
of learning neural architecture. Evolutionary compu-
tation, 19(3):469–523.
Langdon, W. and Harman, M. (2010). Evolving a cuda ker-
nel from an nvidia template. CEC, pages 1–8.
Langdon, W. B. and Harman, M. (2015). Optimising
existing software with genetic programming. TEC,
19(1):118–135.
Leitner, J., Harding, S., F
¨
orster, A., and Schmidhuber, J.
(2012). Mars terrain image classification using carte-
sian genetic programming. 11th International Sympo-
sium on Artificial Intelligence, Robotics and Automa-
tion in Space (i-SAIRAS).
Matthews, B. W. (1975). Comparison of the predicted and
observed secondary structure of t4 phage lysozyme.
Biochimica et Biophysica Acta, 405(2):442–451.
Miller, J., Thomson, P., Fogarty, T., and Ntroduction, I.
(1997). Designing electronic circuits using evolu-
tionary algorithms. arithmetic circuits: A case study.
Genetic Algorithms and Evolution Strategies in Engi-
neering and Computer Science, pages 105–131.
Miller, J. F. (1999). An empirical study of the efficiency of
learning boolean functions using a cartesian ge- netic
programming approach. Proceedings of the Genetic
and Evolutionary Computation Conference, volume 2,
pages 1135–1142.
Miller, J. F. (2001). What Bloat? Cartesian Genetic Pro-
gramming on Boolean Problems. 2001 Genetic and
Evolutionary Computation Conference Late Breaking
Papers, pages 295–302.
Miller, J. F. (2011). Cartesian genetic programming.
Springer.
Miller, J. F. (2019). Cartesian genetic programming: its sta-
tus and future. Genetic Programming and Evolvable
Machines, pages 1–40.
Miller, J. F. and Thomson, P. (2000). Cartesian Genetic
Programming. In Lecture Notes in Computer Science
(including subseries Lecture Notes in Artificial Intel-
ligence and Lecture Notes in Bioinformatics), volume
1802, pages 121–132. Springer.
Petke, J., Harman, M., Langdon, W., and Weimer, W.
(2014). Using genetic improvement and code trans-
plants to specialise a c++ program to a problem class.
EuroGP, 137–149.
Rundo, L., Tangherloni, A., Nobile, M. S., Militello, C.,
Besozzi, D., Mauri, G., and Cazzaniga, P. (2019).
Medga: A novel evolutionary method for image en-
hancement in medical imaging systems. Expert Sys-
tems with Applications, 119:387–399.
Stanley, K. O. and Miikkulainen, R. (2002). Efficient evo-
lution of neural network topologies. Journal of Com-
puting and Information Technology, 7:33–47.
White, D. R., Arcuri, A., and Clark, J. A. (2011). Evolution-
ary improvement of programs. TEC, 15(4):515–538.
Whitley, D., Rana, S., and Heckendorn, R. B. (1998). The
island model genetic algorithm: On separability, pop-
ulation size and convergence. Journal of Computing
and Information Technology, 7:33–47.
Wu, F., Weimer, W., Harman, M., Jia, Y., and Krinke, J.
(2015). Deep parameter optimisation. GECCO.
Improving Image Filters with Cartesian Genetic Programming
27
