
Unsupervised Domain Adaptation for 6DOF Indoor Localization
Daniele Di Mauro
1 a
, Antonino Furnari
1 b
, Giovanni Signorello
2 c
and Giovanni Maria Farinella
1 d
1
Department of Mathematics and Computer Science, University of Catania, Piazza Universit
`
a 2, Catania, Italy
2
CUTGANA, University of Catania, Piazza Universit
`
a 2, Catania, Italy
Keywords:
Domain Adaptation, Localization, 6DOF, Camera Pose Estimation.
Abstract:
Visual Localization is gathering more and more attention in computer vision due to the spread of wearable
cameras (e.g. smart glasses) and to the increase of general interest in autonomous vehicles and robots. Unfor-
tunately, current localization algorithms rely on large amounts of labeled training data collected in the specific
target environment in which the system needs to work. Data collection and labeling in this context is difficult
and time-consuming. Moreover, the process has to be repeated when the system is adapted to a new environ-
ment. In this work, we consider a scenario in which the target environment has been scanned to obtain a 3D
model of the scene suitable to generate large quantities of synthetic data automatically paired with localiza-
tion labels. We hence investigate the use of Unsupervised Domain Adaptation techniques exploiting labeled
synthetic data and unlabeled real data to train localization algorithms. To carry out the study, we introduce a
new dataset composed of synthetic and real images labeled with their 6-DOF poses collected in four different
indoor rooms which is available at https://iplab.dmi.unict.it/EGO-CH-LOC-UDA. A new method based on
self-supervision and attention modules is hence proposed and tested on the proposed dataset. Results show
that our method improves over baselines and state-of-the-art algorithms tackling similar domain adaptation
tasks.
1 INTRODUCTION
The topic of visual localization is central in Computer
Vision due to the increasing use of smartphones and
smart glasses, as well as due to its applicability in
contexts such as autonomous vehicles and robotics.
Being able to locate the position of a device in an en-
vironment is an important and often necessary ability
to solve other complex tasks such as understanding
which future actions are possible, determining how to
reach specific places, or providing assistance to the
user (H
¨
ane et al., 2017; Gupta et al., 2017; Ragusa
et al., 2020b). While visual localization can be per-
formed both in indoor and outdoor environments, it is
particularly relevant in indoor scenarios where GPS
systems can not be used and infrastructures such as
WI-FI or bluetooth receivers are not always feasible
to install (e.g., museums, archaeological sites). Vi-
sual localization can be performed at different levels
a
https://orcid.org/0000-0002-4286-2050
b
https://orcid.org/0000-0001-6911-0302
c
https://orcid.org/0000-0002-5140-4975
d
https://orcid.org/0000-0002-6034-0432
of granularity, depending on the application. For ex-
ample, a navigation system may require the precise
location of the user within a building, whereas a wear-
able contextual assistant may need to recognize only
in which room a certain action of the user is taking
place (Ortis et al., 2017).
In this work, we focus on accurate indoor visual
localization through the estimation of the 6 Degrees
of Freedom (6-DOF) pose of the camera carried by
the user. Popular approaches to tackle this task re-
quire the collection and labeling of large datasets of
images in the target environment (Kendall et al., 2015;
Melekhov et al., 2017b). While images can be eas-
ily collected with a moving camera, labeling is per-
formed by attaching a 6-DOF pose to each frame us-
ing structure from motion techniques (Sch
¨
onberger
and Frahm, 2016; Sch
¨
onberger et al., 2016b), which
often requires the manual intervention of experts. As
a result, creating datasets for training visual localiza-
tion algorithms is time-consuming and expensive.
In this work, we investigate the use of Unsuper-
vised Domain Adaptation approaches (Tzeng et al.,
2017; Hoffman et al., 2018) to exploit labeled syn-
954
Di Mauro, D., Furnari, A., Signorello, G. and Farinella, G.
Unsupervised Domain Adaptation for 6DOF Indoor Localization.
DOI: 10.5220/0010333409540961
In Proceedings of the 16th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2021) - Volume 5: VISAPP, pages
954-961
ISBN: 978-989-758-488-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Labeled Synthetic images
(Source Domain)
Unlabeled Real images
(Target Domain)
Automatically
Generated
6DOF Labels
Wearable Camera
3D Scanner
3D Model
Figure 1: A scheme of the considered domain adaptation pipeline. We use weareable cameras to collect unlabeled real
images ad a scanner to obtain a 3D model of the environment. The 3D model is used to generate synthetic images which
are automatically labeled with their 6-DOF camera poses. This data is used to train a visual localization approach through
unsupervised domain adaptation techniques. At test time, the localization algorithm is required to work on real images. Note
that this pipeline does not require any manual annotation.
thetic data and unlabeled real data for the training
of localization algorithms. Specifically, we consider
a scenario in which a 3D model of the environment
has been acquired using a scanner such as Matter-
port 3D
1
. The 3D model can be used to simulate an
agent navigating the environment and automatically
obtain synthetic labeled images as proposed in (Or-
lando et al., 2020). We also assume that real im-
ages of the same environment have been acquired but
not labeled. Since labeling is the most expensive
step, acquiring this data is significantly less expen-
sive. We hence investigate the use of unsupervised
domain adaptation techniques that take the labeled
synthetic data and the unlabeled real data as input
to learn how to perform localization in real test data.
Figure 1 shows a scheme of the considered pipeline.
The main contributions of this work are as follows:
1. we investigate the novel task of unsupervised do-
main adaptation for 6DOF camera pose estima-
tion for visual localization in indoor scenarios;
2. we propose a first dataset to study the consid-
ered problem. The dataset has been acquired in
4 different rooms of a cultural heritage site and
contains synthetic and real data which has been
labeled with 6-DOF camera poses for algorithm
evaluation and comparison. We publicly release
the dataset to encourage research in this domain;
3. we propose a new approach based on self-
supervision and attention modules that outper-
forms baselines and state-of-the-art approaches.
1
https://matterport.com/
2 RELATED WORK
Visual Localization. Visual localization approaches
based on monocular RGB images can be grouped in
two major classes: methods based on classification
and methods based on camera pose estimation. In
turn, camera pose estimation can be obtained through
image retrieval, direct regression or exploiting 2D-3D
matchings. Classification based localization is ob-
tained through the discretization of the space in cells
and training of a classifier to assign the correct cell
to a given image. Some classification-based meth-
ods use Bag of Words representations (Ishihara et al.,
2017; Cao and Snavely, 2013), whereas others are
based on CNNs (Weyand et al., 2016). These ap-
proaches are not designed to estimate the accurate
position and orientation of the camera. The authors
of (Furnari et al., 2016) recognize user-specified per-
sonal locations from first person videos by consider-
ing visual localization as an “open-set” classification
problem where locations of interest for the user have
to be recognized, while the ones not defined by the
user have to be rejected. Other works (Starner et al.,
1998) threat localization as a “closed-set” classifica-
tion problem in which only known rooms are consid-
ered.
Approaches based on image retrieval (Sattler
et al., 2016; Torii et al., 2015; Weyand et al., 2016)
approximate the location of a test image assigning it
the pose of the most similar one in the training set.
Approaches to localization through regression
from monocular images are based on absolute pose
Unsupervised Domain Adaptation for 6DOF Indoor Localization
955

regression or relative pose prediction. In the first
class of approaches, a CNN is trained to predict cam-
era poses directly from input images. Popular ap-
proaches based on direct camera pose regression first
extract features using a backbone CNN, then embed
features in a high-dimensional space. The learned
embedding space is hence used to regress the camera
pose (Kendall et al., 2015; Melekhov et al., 2017a;
Radwan et al., 2018). The second line of approaches
are based on relative camera pose regression. These
methods have the advantage that a relative pose re-
gression network can be trained to generalize on mul-
tiple scenes. Such approaches try to predict the pose
of a test image relative to one or more training im-
ages (Balntas et al., 2018; Saha et al., 2018).
Approaches based on 2D-3D matchings are cur-
rently the state of the art for localization. These
methods rely on establishing matchings between 2D
pixels positions in the image and 3D scene coordi-
nates. Matchings are established by using a descriptor
matching algorithm or by regressing 3D coordinates
from image patches (Brachmann and Rother, 2018;
Taira et al., 2018). Despite their accuracy these meth-
ods currently do not scale well to city-scale environ-
ments, especially when they have to be executed in
real time.
In this work, we focus on approaches based on di-
rect camera pose estimation and show how they can
be extended with unsupervised domain adaptation ap-
proaches.
Unsupervised Domain Adaptation. Despite huge
amounts of unlabeled data are generated and made
available in many domains, the cost of data label-
ing is still high. To avoid this pitfall, several alter-
native solutions have been proposed in order to ex-
ploit huge amounts of unlabeled data for training. We
focus on Unsupervised Domain Adaptation (Ganin
and Lempitsky, 2015; Gong et al., 2012) which lever-
ages labeled data available in a source domain to im-
prove performance in an unlabeled target domain. In
general, we assume that the label set defined on the
target domain is identical to the one defined on the
source domain, whereas source and target domains
are assumed to be related but not identical. When
the distributions of the source and the target domains
do not match, performance can be poor at testing
time. This difference in distribution is called domain-
shift (Saenko et al., 2010). A main cause of domain
shift is the change in data acquisition conditions, e.g.
background, position, use of images of different kind,
e.g. photographs vs clip-art. There are several algo-
rithms for Domain Adaptation, both based on hand-
crafted features and based on deep learning. In the last
years, architectures designed to tackle domain adap-
tation are increasing for different tasks such as clas-
sification(Tzeng et al., 2017; Hoffman et al., 2018),
semantic segmentation (Di Mauro et al., 2020; Hoff-
man et al., 2018; Ragusa et al., 2020a), and object
detection (Pasqualino et al., 2020). A first class of
methods is based on the minimization of discrepancy
measures, such as the Maximum Mean Discrepancy
(MMD) defined between corresponding activations
from two streams of a Siamese architecture (Long
et al., 2017; Rozantsev et al., 2018). Some approaches
use adversarial losses to learn domain-invariant rep-
resentations. We distinguish between adversarial dis-
criminative models which encourage domain confu-
sion through an adversarial objective with respect to
a domain discriminator (Ganin et al., 2016; Tzeng
et al., 2017), and adversarial generative models which
combine the discriminative model with a generative
component based on GANs (Goodfellow et al., 2014;
Hoffman et al., 2018) . Other methods are based on
data reconstruction through an encoder-decoder ar-
chitecture. These approaches jointly learn source la-
bel predictions and unsupervised target data recon-
struction alternating between unsupervised and super-
vised training (Zeiler et al., 2010; Di Mauro et al.,
2020; Ghifary et al., 2016).
In this work, we reduce the discrepancy between
the source and target domains, aligning their features
via self-supervised tasks.
Generation of Synthetic Data. Recent advances in
computer graphics and game engines allow to gen-
erate photo-realistic virtual worlds with realistic and
physically consistent events and actions. This has in-
creased the use of virtual worlds for synthetic data
generation in conjunction with domain adaptation
models. Most popular virtual worlds have been espe-
cially designed for autonomous driving applications
such as SYNTHIA (Ros et al., 2016) or for robot
agents training such as HABITAT (Savva et al., 2019).
In most cases, the synthetic data is used alongside the
real data during the training of the models. Domain
Adaptation techniques may further assist in adapting
the trained model with virtual (source) data to real
(target) data, especially when labeled real data (Ros
et al., 2016) are not available, or scarce. In (Orlando
et al., 2020) a tool has been developed to collect syn-
thetic visual data for localization purpose and to auto-
matically tag data. The tool simulates a virtual agent
navigating the 3D model and automatically captures
images along with the associated camera poses and
semantic masks showing the location of the artworks.
In this work we use the aforementioned tool to pro-
duce the synthetic part of our dataset.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
956

Figure 2: Scans of the considered rooms of the cultural site.
Table 1: Dataset Splits.
Real Simulated
Train Test Val Train Test Val
Room 1 561 373 252 8221 4078 4154
Room 2 562 305 233 6299 3280 3081
Room 3 405 253 321 10493 3204 3493
Room 4 128 88 65 2049 1096 989
Total 1656 1019 871 27062 11658 11718
3 DATASET
The dataset was acquired in the Bellomo Palace Re-
gional Gallery, which is a museum sited in Syracuse,
Italy. We recorded 10 videos of subjects visiting the
museum with a GoPro Hero 4 wearable camera and
Matterport 3D to obtain a 3D scan of the environ-
ment. We collected data in 4 rooms of the building
(Figure 2). The considered rooms offer a good repre-
sentation of what can be found in a museum because
they contain statues, paintings and items behind dis-
play cases. We used the tool proposed in (Orlando
et al., 2020) to simulate a virtual agent navigating
the 4 rooms from the 3D model of the environment.
Specifically, we produced 4 different videos of simu-
lated navigations. Due to the simulated nature of the
navigations, the generated images were automatically
associated to their 6-DOF camera pose.
To label real images collected through the Go-
Pro Hero 4 camera, we reconstructed each room us-
ing COLMAP (Sch
¨
onberger and Frahm, 2016). The
reconstructed models have then been aligned to the
related Matterport 3D models using a reference set
of localized images obtained through Matterport 3D.
The alignment has been performed using the Man-
hattan world alignment functionality of COLMAP.
Through this procedure each real and synthetic image
has been annotated with 6-DOF camera pose includ-
ing 3 spatial coordinates and 4 values to represent the
rotation as a quaternion. Figure 3 shows some exam-
ples of the acquired data. Real and simulated images
have been split into train, test and validation sets as
shown in Table 1. These splits have been defined as
follows: for synthetic data, all frames extracted from
first navigation video have been used for test, whereas
frames from the second and third videos have been
used for train and frames from the fourth video have
been used for validation; for the real data, all frames
extracted from the first to sixth video are in the train
split, frames from the seventh and eighth videos have
been used for test split and frames from the nineth and
tenth videos have been used for validation split.
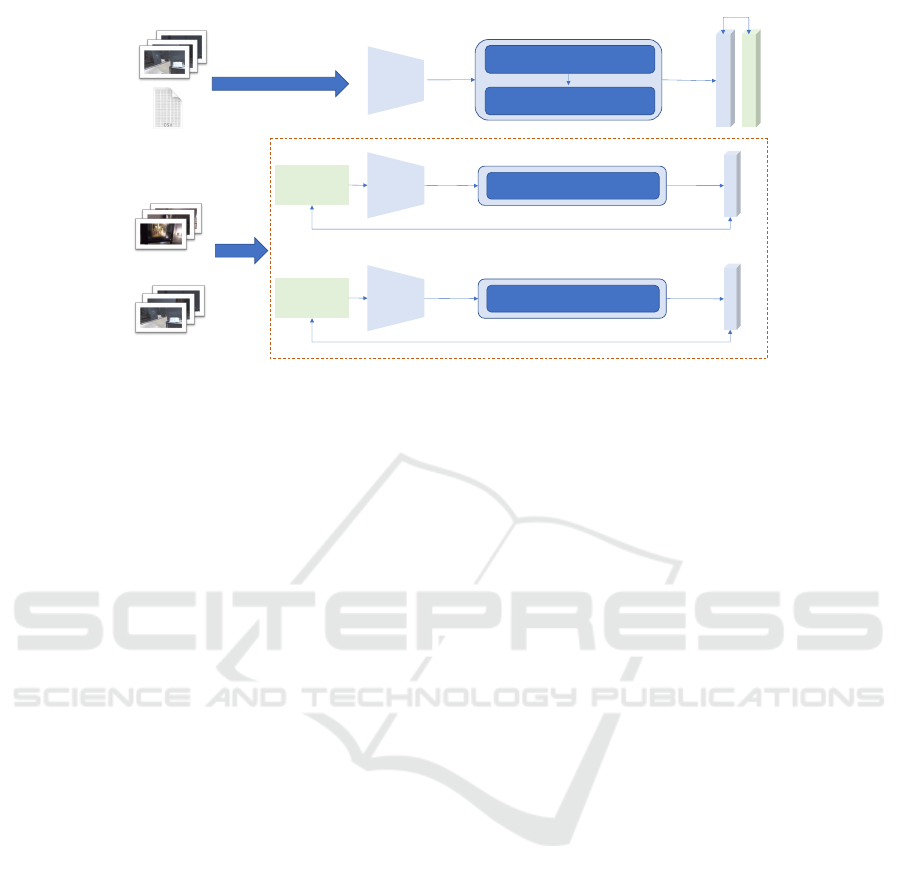
4 METHOD
The proposed method learns to perform image-based
localization following an unsupervised domain adap-
tation approach, i.e, only labeled synthetic images
and unlabeled real images are used at training time,
whereas real labeled images are used for evaluation
only. Figure 4 shows a schema of the proposed model
which includes a ResNet backbone for feature extrac-
tion, a regression branch with an attention module
and a self-supervised branch. The regression branch
is designed to predict the 6-DOF camera pose di-
rectly from the input image as in PoseNet (Kendall
et al., 2015), whereas the self-supervised branch en-
courages the learned features to be consistent across
domains. The regression branch is composed of an
attention module and a regression head. The dual at-
tention module follows the design proposed in (Fu
et al., 2019) and is composed of: a Position Atten-
Unsupervised Domain Adaptation for 6DOF Indoor Localization
957

Real Simulated
Room 1Room 2Room 3Room 4
Figure 3: Three examples of real (left) and synthetic (right) images from each room.
tion Module (PAM) and a Channel Attention Mod-
ule (CAM). PAM selectively aggregates features at
each position through a weighted sum of features at
all positions. In this way, similar features will be
related to each other regardless of their spatial dis-
tances. As explained in (Fu et al., 2019), given a lo-
cal feature map A ∈ R
C×H×W
, the PAM module uses
convolution layers to generate three new feature maps
B, C, D ∈ R
C×H×W
. The values of a spatial attention
map S ∈ R
N×N
, where N = H ×W , are computed as:
s
ji
=
exp(B
i
·C
j
)
∑
N
i=1
exp(B
i
·C
j
)
(1)
where i and j index the spatial locations of B and C.
The final values of the output E ∈ R
C×H×W
are com-
puted as:
E
j
= α
N
∑
i=1
(s
ji
D
i
) + A
j
(2)
where α is a scaling parameter initialized as 0 and
optimized at training time. The CAM module selec-
tively emphasizes interdependent channel maps by in-
tegrating associated features among all channel maps.
The values of the attention map X ∈ R
C×C
are di-
rectly computed from the original feature maps A ∈
R
C×H×W
as follows:
x
ji
=
exp(A
i
· A
j
)
∑
C
i=1
exp(A
i
· A
j
)
(3)
where x
ji
measures the i
th
channel’s impact on the j
th
channel. The values of the final output F ∈ R
C×H×W
are computed as follows:
F
j
= β
C
∑
i=1
(x
ji
A
i
) + A
j
(4)
where β is initialized to 0 and optimized at training
time. The outputs of the two modules are finally
summed.
To learn features which are consistent across do-
mains, the self-supervised branch introduces an aux-
iliary task which can be performed on both domains
simultaneously without the need for supervised la-
bels. We considered 2 different tasks: the classifi-
cation of affine transformation applied to the image
and the detection of the presence of an overlap be-
tween a pair of images. For the affine transforma-
tion task, we pre-computed 36 affine transformations.
Each affine transformation is defined by a combina-
tion of angle, translation and shear. The classes are
a subset of classes generated varying the rotation an-
gle between 0
◦
and 90
◦
, the translation parameter be-
tween −10 pixels and 10 pixels at a step of 5 pixels,
and the shear between −10 pixels and 10 pixels at
a step of 5 pixels. In our tests, a higher number of
classes does not seem to affect results. At training
time, we apply a random transformation to the input
image. The self supervised module is hence trained
to recognize which affine transformation was applied.
This self-supervised task encourages the backbone to
extract features which allow to recognize geometrical
variations.
The overlap detection task is performed with a
siamese network with a shared backbone, which clas-
sifies a pair of images as overlapping or not overlap-
ping. The task encourages to learn features which al-
low to understand if there is a common part between
two different images. Overlapping image pairs are
identified at batch level. In this case, a batch has to
be composed by an even number of images. A pair
is labeled as overlapping if it is detected at least one
match using the OpenCV Flann based matcher.
We train the model with the MSE loss to regress
position and orientation, while the cross-entropy loss
is used to train the self-supervised classification task
and detection overlap (yes/no binary classification).
At each training iteration, the backbone weights are
updated first on the self-supervised task, then on the
localization task.
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
958
G
T
P
o
s
e
Dual Attention Module
Regression Head
P
o
s
e
MSE Position + MSE orientation
Regression Branch
Resnet
Self Supervised Branch Affine
Self Supervised Module
Cross-Entropy Loss
C
l
a
s
s
Resnet
Affine
Transform
and labeling
Self Supervised Branch Overlap
Self Supervised Module
Cross-Entropy Loss
C
l
a
s
s
Resnet
Overlap
Labeling
Labeled Synthetic
images
Unlabeled Real
images
Labeled Synthetic
images
6DOF
Labels
Figure 4: The proposed approach composed of a ResNet backbone, a regression branch with a dual attention module and a
self supervised head to perform unsupervised domain adaptation. Backbone weights are shared. For the self-supervised task
which detects overlap, batch size has to be even.
5 EXPERIMENTAL SETTINGS
AND RESULTS
We compare our method with the following baselines:
1. a SIFT-based image retrieval approach, “Vote
And Verify” implemented in the COLMAP soft-
ware (Sch
¨
onberger et al., 2016a);
2. the PoseNet approach to localization (Kendall
et al., 2015);
3. two naive domain adaptation methods based on
CylcleGAN (Zhu et al., 2017): transforming real
images to look like synthetic ones and using
PoseNet trained over synthetic images. We also
considered transforming synthetic images to look
like real, train a new model, and test over real im-
ages;
4. ADDA, a domain adaptation method which fo-
cuses on features adaptation (Tzeng et al., 2017);
5. CyCada, a domain adaptation method which fo-
cuses on adaptation on both features and input
data (Hoffman et al., 2018).
All the networks have been trained for 500 epochs on
images of each room. The best performing epoch on
the test set has been chosen as a form of early stop-
ping. The method is implemented using PyTorch and
tested on a system with two NVIDIA GeForce Titan
X Pascal GPUs with 12GB GDDR5X RAM. We per-
formed experiments training and testing on the same
domain, as well as training on simulated images and
testing on real images. We trained each model inde-
pendently on each room and averaged the results ob-
tained across rooms.
Table 2 reports the results obtained training and test-
ing methods on real data. In the table, we show aver-
age position error, average quaternion error and av-
erage Euler angle errors. We can see that best re-
sults are obtained using the classic image retrieval
technique methods. Our method shows better results
than PoseNet. We think that the use of the attention
head and self-supervised task improves the embed-
ding space. The classic image retrieval “Vote And
Verify” is still better performing than our method,
probably because the big vocabulary used (1 million
visual words) results in a better way to index im-
ages. Table 3 reports the results obtained training
and testing approaches on the simulated domain. Fi-
nally, Table 4 reports results of the domain adapta-
tion methods. Specifically we compare our method
to style transfer at test time, where real images are
transformed to “synthetic”, style transfer at train time,
where PoseNet is trained with synthetic data styled as
real, ADDA (Tzeng et al., 2017) and CyCada (Hoff-
man et al., 2018). These latter two approaches achieve
even worse results than model when has not been
adapted. Both these approaches fail to solve the prob-
lem in this formulation. Our method reduces the po-
sition error by 44.08% in the best test in comparison
to PoseNet, using the overlap detection task and has
similar results on orientation, and reduces the error by
5.97% in comparison to style transfer at training time,
it is worth to note that our method is faster at training
time, it takes one third of time to train our method in-
stead of training CycleGAN, translate the images and
finally training PoseNet.
Unsupervised Domain Adaptation for 6DOF Indoor Localization
959
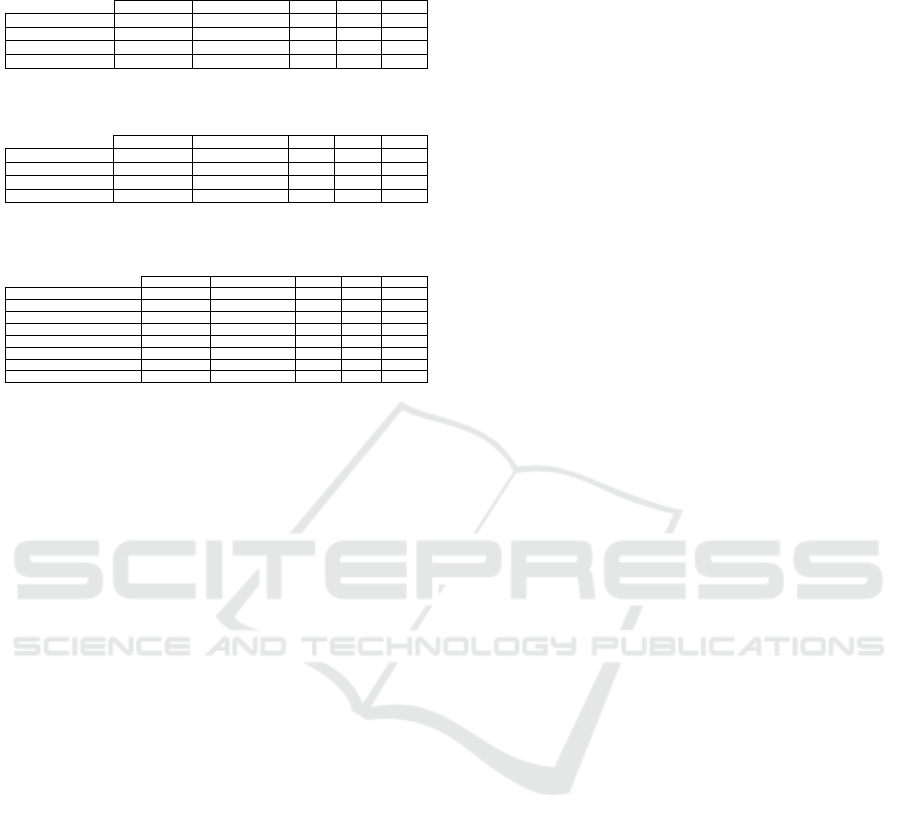
Table 2: Real vs. Real on first room, average results over
four models trained and tested on each room.
Position Err. Quaternion Err. α Err. β Err. γ Err.
PoseNet (beta 100) 1.43m 28.54° 32.23° 9.48° 10.12°
Vote-and-Verify 0.82m 22.78° 27.98° 7.83° 8.23°
Our w/affine 1.26m 27.73° 27.53° 8.90° 9.53°
Our w/overlap 1.28m 27.40° 28.75° 9.12° 9.05°
Table 3: Simulated vs. Simulated average results over four
models trained and tested on each room.
Position Err. Quaternion Err. α Err. β Err. γ Err.
PoseNet (beta 100) 1.28m 28.72° 62.11° 19.80° 54.24°
Vote-and-Verify 0.54m 14.50° 50.66° 10.43° 43.72°
Our w/affine 0.89m 43.71° 69.87° 29.59° 66.33°
Our w/overlap 0.82m 43.97° 72.96° 29.28° 69.32°
Table 4: Real vs. Simulated average results over four mod-
els trained and tested on each room.
Position Err. Quaternion Err. α Err. β Err. γ Err.
PoseNet (beta 100) 3.38m 114.70° 108.38° 45.77° 83.24°
Vote-and-Verify 3.39m 100.58° 112.72° 41.62° 61.94°
CycleGan + PoseNet (Test) 2.68m 113.42° 88.82° 41.44° 98.84°
CycleGan + PoseNet (Train) 2.01m 101.22° 99.72° 39.64° 84.61°
ADDA 4.54m 131.07° 80.84° 44.29° 113.73°
CyCada 4.15m 116.56° 109.06° 49.01° 32.72°
Our w/affine 1.96m 111.55° 77.31° 32.72° 109.27°
Our w/overlap 1.89m 109.06° 96.30° 36.81° 94.73°
6 CONCLUSION
In this work we have proposed the new problem
of unsupervised domain adaptation for 6-DOF local-
ization. We collected a new dataset in a cultural
site which is available at https://iplab.dmi.unict.it/
EGO-CH-LOC-UDA/. We have introduced a method
to exploit synthetic data to learn to regress pose in
indoor environments. Results show that the prob-
lem is still open. In particular, the results of abso-
lute pose estimation are still underperforming com-
pared to classical image retrieval approaches and do-
main adaptation approaches are accordingly affected
by this. Relative pose estimation could be investi-
gated in the future as a way to reduce localization er-
ror as well as models for 2D-3D matching.
ACKNOWLEDGEMENT
This research is supported by XENIA Progetti
s.r.l., by project VALUE - Visual Analysis for Lo-
calization and Understanding of Environments (N.
08CT6209090207 - CUP G69J18001060007) - PO
FESR 2014/2020 - Azione 1.1.5., by Piano della
Ricerca 2016-2018 linea di Intervento 1 CHANCE
- University of Catania. The authors would like to
thank Regione Siciliana Assessorato dei Beni Cul-
turali dell’Identit
`
a Siciliana - Dipartimento dei Beni
Culturali e dell’Identit
`
a Siciliana and Polo regionale
di Siracusa per i siti culturali - Galleria Regionale di
Palazzo Bellomo.
REFERENCES
Balntas, V., Li, S., and Prisacariu, V. (2018). Relocnet:
Continuous metric learning relocalisation using neu-
ral nets. In European Conference on Computer Vision
(ECCV), pages 751–767.
Brachmann, E. and Rother, C. (2018). Learning less is
more-6d camera localization via 3d surface regres-
sion. In IEEE Conference on Computer Vision and
Pattern Recognition, pages 4654–4662.
Cao, S. and Snavely, N. (2013). Graph-based discrimina-
tive learning for location recognition. In ieee con-
ference on computer vision and pattern recognition,
pages 700–707.
Di Mauro, D., Furnari, A., Patan
`
e, G., Battiato, S., and
Farinella, G. M. (2020). Sceneadapt: Scene-based do-
main adaptation for semantic segmentation using ad-
versarial learning. Pattern Recognition Letters.
Fu, J., Liu, J., Tian, H., Li, Y., Bao, Y., Fang, Z., and Lu,
H. (2019). Dual attention network for scene segmen-
tation. In IEEE Conference on Computer Vision and
Pattern Recognition, pages 3146–3154.
Furnari, A., Farinella, G. M., and Battiato, S. (2016). Rec-
ognizing personal locations from egocentric videos.
IEEE Transactions on Human-Machine Systems,
47(1):6–18.
Ganin, Y. and Lempitsky, V. (2015). Unsupervised domain
adaptation by backpropagation. In International con-
ference on machine learning, pages 1180–1189.
Ganin, Y., Ustinova, E., Ajakan, H., Germain, P.,
Larochelle, H., Laviolette, F., Marchand, M., and
Lempitsky, V. (2016). Domain-adversarial training of
neural networks. The Journal of Machine Learning
Research, 17(1):2096–2030.
Ghifary, M., Kleijn, W. B., Zhang, M., Balduzzi, D., and
Li, W. (2016). Deep reconstruction-classification net-
works for unsupervised domain adaptation. In Euro-
pean Conference on Computer Vision, pages 597–613.
Gong, B., Shi, Y., Sha, F., and Grauman, K. (2012).
Geodesic flow kernel for unsupervised domain adap-
tation. In 2012 IEEE Conference on Computer Vision
and Pattern Recognition, pages 2066–2073. IEEE.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In
Advances in neural information processing systems,
pages 2672–2680.
Gupta, S., Davidson, J., Levine, S., Sukthankar, R., and Ma-
lik, J. (2017). Cognitive mapping and planning for
visual navigation. In IEEE Conference on Computer
Vision and Pattern Recognition, pages 2616–2625.
H
¨
ane, C., Heng, L., Lee, G. H., Fraundorfer, F., Furgale, P.,
Sattler, T., and Pollefeys, M. (2017). 3d visual per-
ception for self-driving cars using a multi-camera sys-
tem: Calibration, mapping, localization, and obstacle
detection. Image and Vision Computing, 68:14–27.
Hoffman, J., Tzeng, E., Park, T., Zhu, J.-Y., Isola, P.,
Saenko, K., Efros, A., and Darrell, T. (2018). Cycada:
Cycle-consistent adversarial domain adaptation. In
VISAPP 2021 - 16th International Conference on Computer Vision Theory and Applications
960

International conference on machine learning, pages
1989–1998. PMLR.
Ishihara, T., Vongkulbhisal, J., Kitani, K. M., and Asakawa,
C. (2017). Beacon-guided structure from motion for
smartphone-based navigation. In 2017 IEEE Win-
ter Conference on Applications of Computer Vision
(WACV), pages 769–777. IEEE.
Kendall, A., Grimes, M., and Cipolla, R. (2015). Posenet:
A convolutional network for real-time 6-dof camera
relocalization. In IEEE international conference on
computer vision, pages 2938–2946.
Long, M., Zhu, H., Wang, J., and Jordan, M. I. (2017). Deep
transfer learning with joint adaptation networks. In
International conference on machine learning, pages
2208–2217. PMLR.
Melekhov, I., Ylioinas, J., Kannala, J., and Rahtu, E.
(2017a). Image-based localization using hourglass
networks. In IEEE International Conference on Com-
puter Vision, pages 879–886.
Melekhov, I., Ylioinas, J., Kannala, J., and Rahtu, E.
(2017b). Relative camera pose estimation using con-
volutional neural networks. In International Confer-
ence on Advanced Concepts for Intelligent Vision Sys-
tems, pages 675–687. Springer.
Orlando, S. A., Furnari, A., and Farinella, G. M. (2020).
Egocentric visitor localization and artwork detection
in cultural sites using synthetic data. Pattern Recogni-
tion Letters, 133:17–24.
Ortis, A., Farinella, G. M., D’Amico, V., Addesso, L., Tor-
risi, G., and Battiato, S. (2017). Organizing egocentric
videos of daily living activities. Pattern Recognition,
72:207–218.
Pasqualino, G., Furnari, A., Signorello, G., and Farinella,
G. M. (2020). Synthetic to real unsupervised domain
adaptation for single-stage artwork recognition in cul-
tural sites. In 2020 25th International Conference on
Pattern Recognition (ICPR). IEEE.
Radwan, N., Valada, A., and Burgard, W. (2018). Vloc-
net++: Deep multitask learning for semantic visual
localization and odometry. IEEE Robotics and Au-
tomation Letters, 3(4):4407–4414.
Ragusa, F., Di Mauro, D., Palermo, A., Furnari, A., and
Farinella, G. M. (2020a). Semantic object segmen-
tation in cultural sites using real and synthetic data.
In 2020 25th International Conference on Pattern
Recognition (ICPR). IEEE.
Ragusa, F., Furnari, A., Battiato, S., Signorello, G., and
Farinella, G. M. (2020b). EGO-CH: Dataset and fun-
damental tasks for visitors behavioral understanding
using egocentric vision. Pattern Recognition Letters,
131:150–157.
Ros, G., Sellart, L., Materzynska, J., Vazquez, D., and
Lopez, A. M. (2016). The synthia dataset: A large
collection of synthetic images for semantic segmenta-
tion of urban scenes. In IEEE conference on computer
vision and pattern recognition, pages 3234–3243.
Rozantsev, A., Salzmann, M., and Fua, P. (2018). Beyond
sharing weights for deep domain adaptation. IEEE
transactions on pattern analysis and machine intelli-
gence, 41(4):801–814.
Saenko, K., Kulis, B., Fritz, M., and Darrell, T. (2010).
Adapting visual category models to new domains. In
European conference on computer vision, pages 213–
226.
Saha, S., Varma, G., and Jawahar, C. (2018). Improved
visual relocalization by discovering anchor points.
arXiv preprint arXiv:1811.04370.
Sattler, T., Havlena, M., Schindler, K., and Pollefeys, M.
(2016). Large-scale location recognition and the ge-
ometric burstiness problem. In IEEE Conference
on Computer Vision and Pattern Recognition, pages
1582–1590.
Savva, M., Kadian, A., Maksymets, O., Zhao, Y., Wijmans,
E., Jain, B., Straub, J., Liu, J., Koltun, V., Malik, J.,
Parikh, D., and Batra, D. (2019). Habitat: A platform
for embodied ai research. In IEEE/CVF International
Conference on Computer Vision (ICCV).
Sch
¨
onberger, J. L. and Frahm, J.-M. (2016). Structure-
from-motion revisited. In Conference on Computer
Vision and Pattern Recognition (CVPR).
Sch
¨
onberger, J. L., Price, T., Sattler, T., Frahm, J.-M., and
Pollefeys, M. (2016a). A vote-and-verify strategy for
fast spatial verification in image retrieval. In Asian
Conference on Computer Vision (ACCV).
Sch
¨
onberger, J. L., Zheng, E., Pollefeys, M., and Frahm,
J.-M. (2016b). Pixelwise view selection for unstruc-
tured multi-view stereo. In European Conference on
Computer Vision (ECCV).
Starner, T., Schiele, B., and Pentland, A. (1998). Visual
contextual awareness in wearable computing. In Di-
gest of Papers. Second International Symposium on
Wearable Computers (Cat. No. 98EX215), pages 50–
57. IEEE.
Taira, H., Okutomi, M., Sattler, T., Cimpoi, M., Pollefeys,
M., Sivic, J., Pajdla, T., and Torii, A. (2018). Inloc: In-
door visual localization with dense matching and view
synthesis. In IEEE Conference on Computer Vision
and Pattern Recognition, pages 7199–7209.
Torii, A., Arandjelovic, R., Sivic, J., Okutomi, M., and Pa-
jdla, T. (2015). 24/7 place recognition by view syn-
thesis. In IEEE Conference on Computer Vision and
Pattern Recognition, pages 1808–1817.
Tzeng, E., Hoffman, J., Saenko, K., and Darrell, T. (2017).
Adversarial discriminative domain adaptation. In
IEEE conference on computer vision and pattern
recognition, pages 7167–7176.
Weyand, T., Kostrikov, I., and Philbin, J. (2016). Planet-
photo geolocation with convolutional neural net-
works. In European Conference on Computer Vision,
pages 37–55. Springer.
Zeiler, M. D., Krishnan, D., Taylor, G. W., and Fergus, R.
(2010). Deconvolutional networks. In 2010 IEEE
Computer Society Conference on computer vision and
pattern recognition, pages 2528–2535. IEEE.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. In IEEE international
conference on computer vision, pages 2223–2232.
Unsupervised Domain Adaptation for 6DOF Indoor Localization
961
