
Intelligent Luminaire based Real-time Indoor Positioning for
Assisted Living
Iuliana Marin, Maria Iuliana Bocicor and Arthur-Jozsef Molnar
SC Info World SRL, Bucharest, Romania
Keywords:
Cyber-physical System, Ambient Assisted Living, Received Signal Strength, Indoor Localisation,
Trilateration, Levenberg-Marquardt Algorithm.
Abstract:
This paper presents an experimental evaluation on the accuracy of indoor localisation. The research was
carried out as part of a European Union project targeting the creation of ICT solutions for older adult care.
Current expectation is that advances in technology will supplement the human workforce required for older
adult care, improve their quality of life and decrease healthcare expenditure. The proposed approach is imple-
mented in the form of a configurable cyber-physical system that enables indoor localization and monitoring of
older adults living at home or in residential buildings. Hardware consists of custom developed luminaires with
sensing, communication and processing capabilities. They replace the existing lighting infrastructure, do not
look out of place and are cost effective. The luminaires record the strength of a Bluetooth signal emitted by a
wearable device equipped by the monitored user. The system’s software server uses trilateration to calculate
the person’s location based on known luminaire placement and recorded signal strengths. However, multipath
fading caused by the presence of walls, furniture and other objects introduces localisation errors. Our previous
experiments showed that room-level accuracy can be achieved using software-based filtering for a stationary
subject. Our current objective is to assess system accuracy in the context of a moving subject, and ascertain
whether room-level localization is feasible in real time.
1 INTRODUCTION
In recent years, the advent of Internet of Things tech-
nologies have enabled the development of smarter so-
lutions for various problems or aspects of life. Accu-
rate indoor localisation and tracking of people proves
to be one such aspect that is highly beneficial for mul-
tiple purposes (Zafari et al., 2019). These include
indoor navigation within large or complex structures
such as shopping malls, airports, museums, offices or
healthcare facilities; tracking staff or mobile equip-
ment in factories or hospitals; facilitating cultural ex-
periences augmented according to visitor context in
exhibitions, museums or sports. One specific, but
highly impactful use case for accurate indoor locali-
sation is within the context of assisted living (Bianchi
et al., 2018).
The World Health Organisation expects the pop-
ulation of people over 60 to double worldwide by
2050 (World Health Organization, 2015). However,
the same report finds that the latest advances in tech-
nology and medicine have yet to be adapted to address
the problem, which is expected to impact healthcare
and local government budgets. The study by (de Mei-
jer et al., 2013) shows a 4% year over year increase in
healthcare expenditure, from which an important part
is expected to be allocated for the needs of the older
population. This creates an opportunity where recent
technological advances can be leveraged to improve
the level of care and quality of life for older adults
living within their own homes, as well as in nursing
and residential facilities.
The present paper addresses the challenge of real-
time indoor positioning in the context of the i-Light
(Marin et al., 2018) cyber-physical system for home
monitoring and assisted living. The system was de-
veloped under funding from the European Union’s
Eurostars programme and uses intelligent luminaires
that were developed as part of the project for indoor
localisation. We present an experiment in which these
luminaires are employed to obtain the real-time in-
door position of a moving person. The experiments
were performed in a three-room dwelling, with one
luminaire deployed in each of the rooms. Luminaires
incorporate a Bluetooth Low Energy (BLE) module
used both for localisation and communication.
Three scenarios were considered, in which the
person moved from one room to another, in sequence,
548
Marin, I., Bocicor, M. and Molnar, A.
Intelligent Luminaire based Real-time Indoor Positioning for Assisted Living.
DOI: 10.5220/0009578705480555
In Proceedings of the 15th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2020), pages 548-555
ISBN: 978-989-758-421-3
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

considering fixed start and finish positions within
each room. Each scenario was repeated three times
in the exact same conditions, for verification and re-
finement of experimental observations. Indoor local-
isation was obtained via trilateration in conjunction
with nonlinear least squares optimisation. The intelli-
gent luminaires collect the Received Signal Strength
Index (RSSI) from the monitored user’s smartphone
every 5 seconds and transfer these to the system’s
software server, where the Levenberg-Marquardt al-
gorithm (Gavin, 2011) is used to determine the loca-
tion of the monitored person.
Our initial indoor positioning experiments that de-
tail several software-based approaches to improve lo-
calisation accuracy for stationary targets are presented
in previous work (Marin et al., 2019). The main ob-
jective of our current work is to evaluate the system’s
performance with regard to indoor localisation of a
moving subject. Accurate indoor positioning of mov-
ing subjects will lower the system’s reaction times
to potentially dangerous situations, and will facilitate
the implementation of more advanced approaches for
characterising user behaviour and detect changes in-
dicative of cognitive impairment.
2 RELATED WORK
Solutions for indoor localisation and tracking have
undergone great development in recent years, par-
ticularly due to their many and diverse applications.
They are used in retail to improve customer experi-
ence, in manufacturing to increase efficiency by ve-
hicle tracking or staff shifting, in culture and enter-
tainment by improving visitor experience, as well as
in healthcare for staff and device tracking, or visi-
tor assistance. Although GPS technology has proven
to be quite reliable outdoors, it does not represent
a solution for indoor localisation due to poor signal
strength (Ozsoy et al., 2013). Obtaining accurate in-
door localisation is a challenging task particularly be-
cause of the multitude of obstacles in the environ-
ment, as well as reflection and refraction that affect
computations (Miao et al., 2018). This has led to
significant progress in creating solutions for employ-
ing other types of technologies for indoors, such as
Wi-Fi, Bluetooth, Global System for Mobile commu-
nications (GSM), Radio Frequency Identification, ul-
tra wide band, acoustics and optics (Ta, 2017; Lym-
beropoulos et al., 2015; Xiao and Zhou, 2016; Caron
et al., 2017).
Techniques such as Time of Flight (ToF) and Time
Difference of Arrival (TDoA) are popular when work-
ing with radio signals. ToF indicates the time a radio
signal needs to travel from a transmitter to a receiver
and back. The disadvantage of ToF is that the accu-
racy is limited by the precision of hardware timers
(Wibowo et al., 2009). ToF can be improved by us-
ing the Bluetooth standard as a channel which miti-
gates the consequences of signal fading and inference
(Giovanelli and Farella, 2018).
TDoA uses the difference given by the arrival time
of the signal sender and receiver (Yu et al., 2019). The
difference is computed as being the multiplication be-
tween the speed of light in vacuum and the time dif-
ference. If there is an obstruction along the path of the
signal, then this will result in wrong target position-
ing. Using the Angle of Arrival technique, the signal
receiver determines the angle based on the direction
of the incoming signal (Wielandt and De Strycker,
2017). Two or multiple nodes are set at known loca-
tions. The target position is given by the intersection
of the lines given by the sensing nodes. This method
is called triangulation. Infrared positioning is used
by many electronic devices, but the accuracy is low,
because rays cannot pass through walls or similar ob-
stacles (Randell and Muller, 2001). Moreover, two
infrared waves can interfere with each other. Ultra-
sound positioning is useful at night. The waves are
characterised by low penetration through obstacles.
As for infrared, a drawback is the interference of ul-
trasonic waves and reflection. A solution would be to
combine it with ToF (Qi and Liu, 2017).
Indoor positioning based on 3D cameras is use-
ful and precise, but it does not offer privacy for the
persons in the monitored area (Li et al., 2010). Inten-
tional blurring using the bokeh effect was evaluated
for determining indoor positioning based on the im-
ages taken with the user’s mobile phone camera (Lee
et al., 2019). Blurring was proved to enhance position
accuracy when determining the distance between a
lamp with a single LED and the user’s mobile phone.
In this way, optical-power saturation is prevented and
accuracy is enhanced. The coordinates of the person
were obtained using the received signal strength and
the angle of arrival. For the received signal strength,
the optical power is determined using the area of the
LED which appears in the photos. In the case of an-
gle of arrival, the angles are determined using the re-
ceived images, where the centre of the light coming
from the LED was analysed. Using the two methods
the 3D rectangular coordinates of the monitored per-
son were obtained.
Both industrial players and the academic commu-
nity have invested resources in solving the problem of
accurate indoor positioning. One company that lever-
ages the wide interest in indoor localisation and fo-
cuses on integrated location-based services is Navig-
Intelligent Luminaire based Real-time Indoor Positioning for Assisted Living
549

ine (Navigine, 2020). They provide an indoor posi-
tioning platform allowing other developers and sys-
tem integrators to build and create indoor navigation
and tracking services. Their platform targets mobile
developers, navigation software vendors, BLE bea-
con manufacturers, real time location systems solu-
tion providers, mapping companies, indoor naviga-
tion companies and others.
Sewio (Sewio, 2020) provides a complete plat-
form for indoor tracking based on ultra-wideband
technology. The system consists of a hardware com-
ponent that includes signal transmitters called tags,
which are attached to monitored targets, and signal
receivers called anchors. Anchors are installed within
the location and must cover the entire area for effi-
cient tracking. The software solution of the platform
includes various components for deployment and con-
figuration, planning, optimal anchor distribution and
type, real-time overview of the system’s performance,
remote settings updating, visualisation and analytic
tools.
The indoor tracking solution offered by WI4B
(WI4B, 2020) consists of a mesh network of nodes
deployed on location that are responsible with collect-
ing and relaying data, managing performance and ex-
changing data with a host application. Wearable tags
must be attached to the monitored persons or assets
in order to allow them to be tracked. Another com-
pany that specialises in real time indoor positioning is
Pointr (Pointr, 2020), whose solutions range from in-
door positioning and navigation to mapping, tracking
and location based analytics. The positioning system
employs beacons, inertial sensors and machine learn-
ing algorithms for both localisation and navigation.
The real time localisation systems from infsoft (inf-
soft, 2019) provide indoor navigation, geo-based as-
sistance, analytics and tracking. These solutions use
mainly Bluetooth beacons, Wi-Fi or ultra-wideband
for indoor positioning.
Extensive academic research has also been con-
ducted with regard to indoor localisation and vari-
ous solutions have been proposed. Many employ
RSSI (Luo et al., 2011; Sadowski and Spachos, 2018;
Maduskar and Tapaswi, 2017), which can be used to
determine the distance between a target and the de-
vice measuring the received signal. However, one
drawback of this method is that RSSI varies over time
due to multipath fading (Pu et al., 2011), degrading
localisation accuracy. Several approaches to allevi-
ate this problem have been proposed, such as the Si-
multaneous Localisation and Configuration algorithm
proposed by (Bulten et al., 2016) as well as Kalman
filter based approaches (Robesaat et al., 2017; Sung,
2016).
(Trogh et al., 2015) propose a system based on the
Viterbi principle in conjunction with semantic data.
They start from an RSSI fingerprinting technique,
consisting of an offline and an online training phase
and then employ the Viterbi algorithm to determine
the most likely sequence of positions, using the sum
of mean square errors between measurements and ref-
erence fingerprints.
In contrast with the aforementioned studies and
technologies, we present a system designed for home
monitoring and assisted living, which includes an in-
door localisation component based on intelligent lu-
minaires. As opposed to other solutions for indoor
positioning, our system does not require fingerprint-
ing, tags or pre-installed anchors. The central compo-
nents are a number of BLE-enabled devices that in-
clude sensing, communication and lighting modules
(Marin et al., 2018), and are deployed in the form of
intelligent luminaires.
The luminaires were created to replace existing
light bulbs and to use existing energy infrastructure,
thus permitting easy deployment, with no additional
wires or devices, while offering reduced costs. The
luminaires communicate via Wi-Fi with the system’s
server and collect localisation information from the
monitored person’s smartphone via the BLE wireless
protocol. This information is relayed to the server in
real-time, which uses trilateration and various opti-
misation algorithms to accurately compute the user’s
location.
3 REAL-TIME INDOOR
LOCALISATION WITH
INTELLIGENT LUMINAIRES
This section provides a concise description of the i-
Light cyber-physical system. The innovative aspects
of the platform hardware and software are further
detailed in our previous work (Bocicor et al., 2017;
Marin et al., 2018; Marin et al., 2019).
The platform hardware is based on luminaires that
were custom developed as part of the project. They
seamlessly replace regular light bulbs and use ex-
isting energy infrastructure. Each luminaire is ei-
ther smart, or dummy, according to its processing
and communication capabilities. Both types include
a lighting module, so they can be used as regular
light bulbs. Smart luminaires incorporate a sensing
module for monitoring ambient conditions as well as
a Wi-Fi and Bluetooth Low Energy communication
module. Dummy luminaires are smaller and more
cost-effective. Their main function is to scan the
ENASE 2020 - 15th International Conference on Evaluation of Novel Approaches to Software Engineering
550
environment for Bluetooth signals and participate in
the indoor localisation process by collecting RSSI
measurements from the monitored person’s device.
Each dummy luminaire is connected to a smart lu-
minaire, to which it sends gathered RSSI readings
via BLE. Each smart luminaire may receive measure-
ments from several dummy ones. Smart luminaires
have the capability to communicate with the system’s
server via Wi-Fi and as such are used to process and
relay aggregated measurements that include ambient
conditions and localisation data to the software server
for additional processing. The indoor positioning pro-
cess takes place on the server, where trilateration and
more advanced techniques, such as Kalman filters
(Marin et al., 2019) or optimisation algorithms are
employed. In our previous work we have concluded
that the accuracy required for the project’s purposes
can typically be achieved using up to three luminaires
per room, depending on room size and shape. Each
room should have one smart luminaire, to ensure the
stability of the connection between smart and dummy
luminaires, as well as that to the software server.
The platform includes a software server that pro-
vides a suite of custom developed, multi-platform ap-
plications. Together with the intelligent luminaire
network, they enable the system to provide config-
urable home monitoring for older adults. The sys-
tem uses ambient condition and RSSI data to provide
indoor localisation, reports and advanced visualisa-
tions. Furthermore, the system provides notifications
and real-time alerts to family members or caregivers
in case a potential danger is detected. For example,
this can happen when the monitored person is im-
mobile, but not in their bed, or when ambient con-
ditions such as temperature or volatile gas concentra-
tions reach unhealthy levels.
4 EXPERIMENTS AND RESULTS
The proposed experiment is the direct continuation of
our previous work (Marin et al., 2019), where sev-
eral software-based approaches were evaluated to im-
prove the accuracy of indoor localisation for a station-
ary subject. We extend our evaluation to a moving
subject, and study the impact of their movement on
accuracy. Furthermore, we evaluate the consistency
of recorded values with respect to errors by repeating
each scenario three times.
Experiments were carried out within an apartment
using n-dimensional space trilateration, with nonlin-
ear least squares optimisation. The algorithm’s in-
put is represented by the known positions of the lu-
minaires and the distances from the monitored target
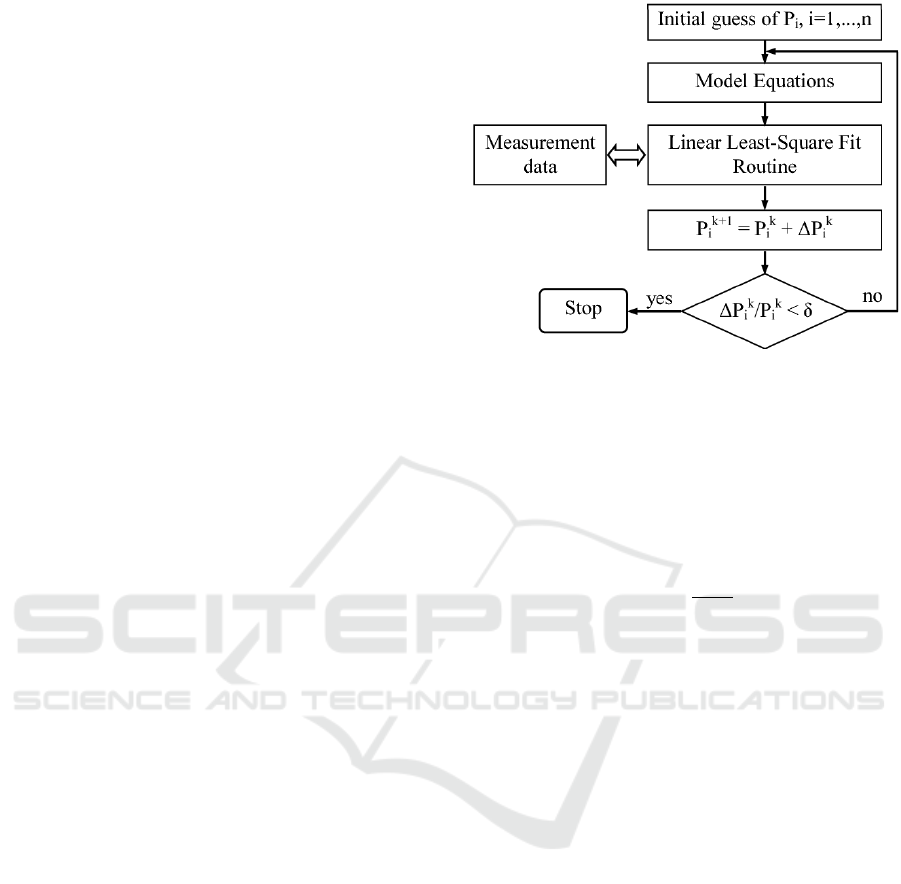
Figure 1: Optimized Levenberg-Marquadt algorithm flow
(Le Duc-Hung et al., 2012).
to each of them. These distances are computed based
on the recorded RSSI values, the path-loss exponent
and the signal strength measured at a distance of one
meter using the following lognormal model (Chern-
tanomwong and Suroso, 2011; Huang et al., 2015;
Marin et al., 2020):
d = 10
A−RSSI
10·n
(1)
The significance of the variables in Formula 1 is as
follows:
• n represents the path-loss exponent, ranging be-
tween 2 to 6 for indoor environments.
• A is the signal strength expressed in dBm, mea-
sured at one meter. This parameter is experimen-
tally computed once for each type of luminaire.
• RSSI is the received signal strength index.
• d is the computed distance. It is the distance be-
tween the luminaire that makes the measurement
and the wearable Bluetooth device.
The output is the centroid that determines the posi-
tion of the monitored person. At least three lumi-
naires are required, along with their locations to allow
the computation of the target person’s position. The
Levenberg-Marquardt algorithm is used to solve the
nonlinear least squares problem (Gavin, 2011). It is
a combination of the gradient descent and the Gauss-
Newton methods for optimisation. Starting from an
initial guess of the parameters, it optimises them in
an iterative manner: when they are far from their op-
timal value, the algorithm behaves like gradient de-
scent, while when they are closer, it switches to em-
ploying the Gauss-Newton method.
The parameters to be optimised are represented by
the two dimensional coordinates of the monitored per-
Intelligent Luminaire based Real-time Indoor Positioning for Assisted Living
551
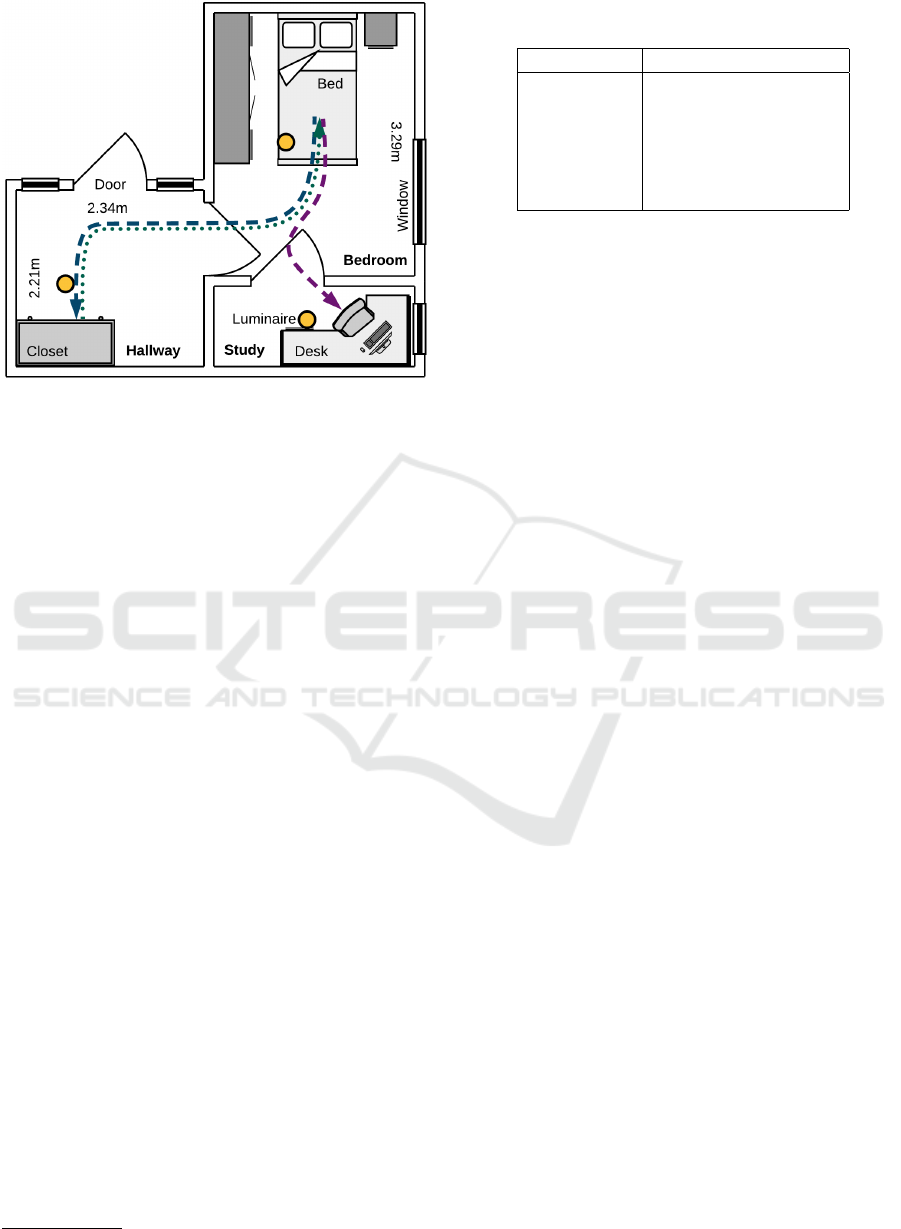
Figure 2: Floor plan of the dwelling used for experimenta-
tion. Evaluated scenarios were (a) walk from the bed to the
closet; (b) walk from the closet to the bed; (c) walk from
the bed to the desk chair.
son’s location. They can be determined from the fol-
lowing system of at least three
1
equations: (x −x
i
)
2
+
(y−y
i
)
2
= d
2
i
, where (x
i
, y
i
) are the coordinates of the
i
th
luminaire, i ∈ {1, 2, · ·· , n}, with n ≥ 3 and (x, y) is
the (unknown) position of the monitored person. The
objective function is thus a non-linear function of the
parameter vector P = [x, y]
T
and the idea is to find
the parameters such that a minimal error between the
model and observed measurements is obtained.
The general form of the optimisation algorithm is
described in Figure 1. It starts with an initial guess for
the fitting parameter values (P). In each iteration the
parameter vector is replaced by a new estimate (P +
∆), according to the Levenberg-Marquardt formulae
(Le Duc-Hung et al., 2012). This process continues
until the calculated step falls below a predefined limit.
4.1 Experimental Setup
The experiment was carried out in three rooms of an
apartment located in a residential building. The layout
of the relevant rooms is illustrated in Figure 2. For the
sake of brevity, the kitchen and bathroom are not rep-
resented. Exterior and interior walls are constructed
of brick and cement. Exterior walls have a thickness
of 35cm, while the thickness of interior walls is 17cm.
As shown in Table 1, building materials have an
important deleterious effect on signal strength, mak-
ing accurate localisation based on the raw values of
signal strength difficult. As shown in Figure 2, one
smart luminaire was ceiling-mounted in each room,
1
One equation per each luminaire.
Table 1: Absorption of radio frequencies in construction
materials relevant to our experiment (Buhagiar, 2018).
Materials Absorption Rate (dB)
Brick wall 6-15
Cement wall 4-6
Glass wall 6
Metal door 6-10
Plasterboard 3-5
Window 3
replacing regular light bulbs. For the duration of the
experiment, the luminaires had a stable Wi-Fi connec-
tion to the software server.
The experiment consisted of three scenarios that
were carried out by a healthy person using a smart-
phone as a BLE signal source. The three scenarios,
also illustrated in Figure 2 are: (a) start from the bed,
walk to the closet and stop; (b) start from the closet,
walk back to the bed and stop; (c) start from the bed,
walk to the desk chair and stop. These were carried
out in sequence, in this order, three times. Care was
taken to ensure that every time the scenario started
from the same initial conditions. Measurements were
recorded every five seconds and the periods for each
scenario were slightly different, depending on the dis-
tance the movement covered, as well as on how long
the person was static at the end of the movement
trail. The indoor locations are computed according
to Formula 1 and using the Levenberg-Marquardt al-
gorithm, by taking into consideration the last three
recorded RSSI values by each luminaire, to attenuate
single reading RSSI errors. Each scenario ends with
the person staying in the same place for an interval
between 50 to 70 seconds. This allows studying the
effect movement has on the accuracy of localisation.
It also allows evaluating how accuracy modifies when
the subject ceases movement.
4.2 Results
Figure 3 illustrates the errors obtained in each of the
three tested scenarios, considering three runs for each
scenario.
In all considered cases, computed indoor positions
are coherent over repeated runs, namely the errors are
highly consistent over time, which indicates the ro-
bustness of our method. This also leads us to be-
lieve that Bluetooth fingerprinting could be employed
to further improve the accuracy of localisation during
movement. We intend to further explore this in future
research.
Another important aspect targeted the impact of
movement on localisation accuracy. Results obtained
ENASE 2020 - 15th International Conference on Evaluation of Novel Approaches to Software Engineering
552
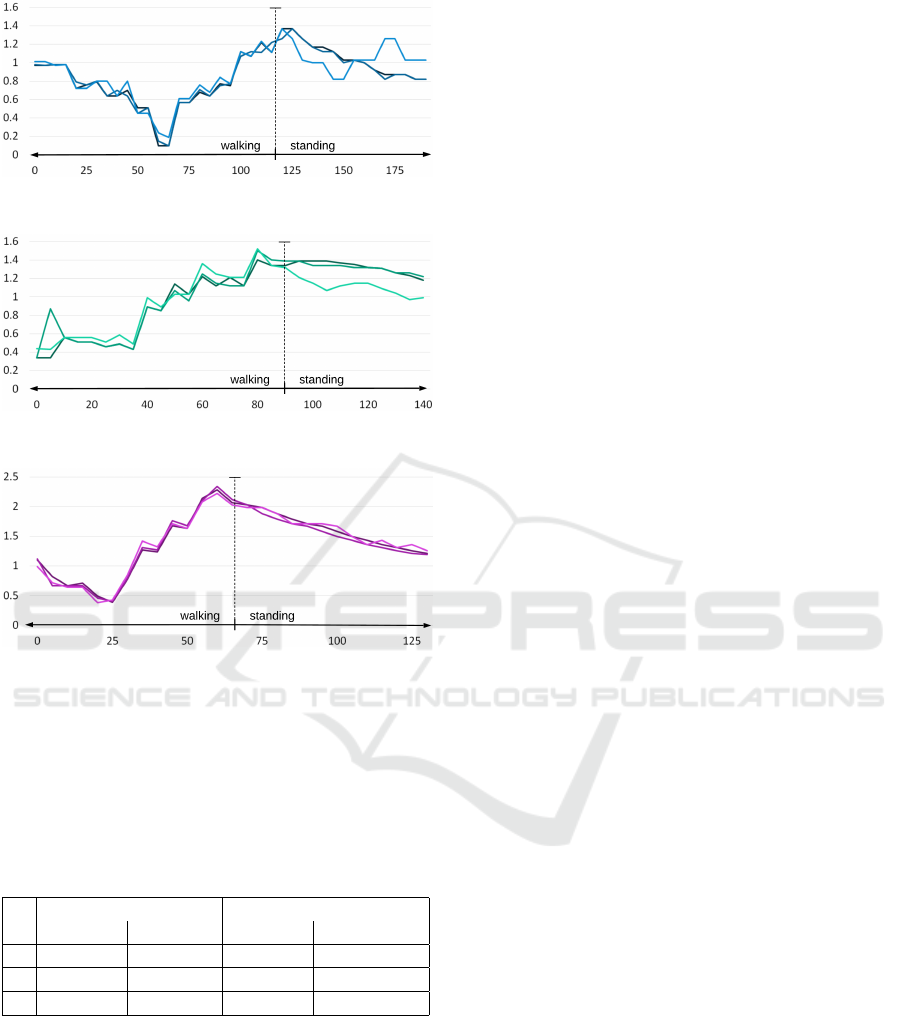
(a) Person walks from the bed to the closet and stands in
front of it.
(b) Person walks from the closet back to the bed and stands
next to it.
(c) Person walks from the bed to the desk chair and sits
down.
Figure 3: The three scenarios of the experiment. Colours
synchronised with Figure 2. The horizontal axis represents
time, expressed in seconds and the vertical one is error,
measured in meters. Each scenario was played out three
times, as illustrated in the subfigures.
Table 2: Average errors and standard deviations (over the
three runs) obtained for all three scenarios.
Average error (m) Standard deviation (m)
Walking Standing Walking Standing
1 0.76 1.05 0.27 0.17
2 0.86 1.25 0.36 0.12
3 1.17 1.61 0.60 0.28
in all three cases indicate that the average error corre-
sponding to the period the person was stationary are
higher than when the person is moving. However,
as depicted in Table 2 as well as Figure 3 plots, the
standard deviation is lower. This indicates that the er-
rors tend to stabilise and it can be noticed that they
even slowly decrease during the time in which the tar-
get is immobile. As such, when measurements are
recorded over longer periods of time they will tend to
be more reliable and less prone to individual errors
in measurement. The experiments show that without
additional software processing (Marin et al., 2019),
the system requires at least a minute to stabilise RSSI
values, leading to more precise localisation results.
The differences in average errors between the
moving and static experiments are particularly due to
the higher errors obtained during movement, when
the person was near doors, but which are also re-
flected in the error computation for the standing pe-
riod. They are influenced by readings collected during
movement, each position being computed by consid-
ering the past three RSSI values obtained from each
of the three luminaires. These higher errors can also
be observed in Figure 3 in each scenario, before the
person stops. They are most likely due to signal ab-
sorption which occurs because walls around doors use
iron-reinforced concrete pillars. While this interfer-
ence happens during movement, it has a lasting im-
pact and affects the calculations carried out when the
person is already stationary.
5 CONCLUSIONS
The presented work continues our initial evaluation
regarding the accuracy of indoor localization of sta-
tionary subjects (Marin et al., 2019). Our first con-
clusion is that results obtained during the stationary
phase remain similar to those obtained in previous
work and provide room-level accuracy.
The second conclusion is that by itself, movement
does not decrease localization accuracy. However, ex-
cessive multipath fading can be observed when the
subject is close to architectural elements built from
materials having high absorption rates. These cause
a fluctuation of signal levels that persists across sev-
eral readings, starting to stabilise once the subject is
stationary. While our previous work (Marin et al.,
2019) shows that additional filtering can improve lo-
calization accuracy, these approaches must be further
adapted and evaluated in the context of a moving sub-
ject.
Future work will be carried out towards improving
the accuracy of localization via filtering techniques
adapted to subject motion together with evaluating the
cost-benefit of location fingerprinting. Deep learning
is an additional approach that can also be used to im-
prove localisation results in an indoor noisy environ-
ment. Some experiments in this regard have already
been performed (Marin et al., 2019) for static targets,
but we plan to extend the evaluation and to also con-
sider data recorded during movement.
Intelligent Luminaire based Real-time Indoor Positioning for Assisted Living
553

ACKNOWLEDGEMENTS
This work was supported by a grant of the Ro-
manian National Authority for Scientific Research
and Innovation, CCCDI UEFISCDI, project number
46E/2015, i-Light - A pervasive home monitoring sys-
tem based on intelligent luminaires.
REFERENCES
Bianchi, V., Ciampolini, P., and De Munari, I. (2018). Rssi-
based indoor localization and identification for zig-
bee wireless sensor networks in smart homes. IEEE
Transactions on Instrumentation and Measurement,
68(2):566–575.
Bocicor, M. I. et al. (2017). Cyber-physical system for as-
sisted living and home monitoring. In 13th IEEE In-
ternational Conference on Intelligent Computer Com-
munication and Processing, pages 487–493.
Buhagiar, J. (2018). CompTIA Network+ Review Guide:
Exam N10-007. Sybex.
Bulten, W., Rossum, A. C. V., and Haselager, W. F. G.
(2016). Human slam, indoor localisation of devices
and users. In IEEE First International Conference on
Internet-of-Things Design and Implementation.
Caron, C., Chamberland-Tremblay, D., Lapierre, C., Ha-
daya, P., Roche, S., and Saada, M. (2017). Indoor
Positioning, pages 1011–1019. Springer International
Publishing, Cham.
Cherntanomwong, P. and Suroso, D. J. (2011). Indoor local-
ization system using wireless sensor networks for sta-
tionary and moving target. In 2011 8th International
Conference on Information, Communications & Sig-
nal Processing, pages 1–5. IEEE.
de Meijer, C., Wouterse, B., Polder, J., and Koopmanschap,
M. (2013). The effect of population aging on health
expenditure growth: a critical review. European jour-
nal of ageing, 10(4):353–361.
Gavin, H. (2011). The levenberg-marquardt method for
nonlinear least squares curve-fitting problems. De-
partment of Civil and Environmental Engineering,
Duke University, pages 1–15.
Giovanelli, D. and Farella, E. (2018). Rssi or time-of-flight
for bluetooth low energy based localization? an exper-
imental evaluation. In 11th IFIP Wireless and Mobile
Networking Conference, pages 32–39. IEEE.
Huang, Y., Zheng, J., Xiao, Y., and Peng, M. (2015). Ro-
bust localization algorithm based on the RSSI rang-
ing scope. International Journal of Distributed Sensor
Networks, 11(2):587318.
infsoft (2019). Indoor navigation, indoor positioning, in-
door analytics and indoor tracking. https://www.
infsoft.com/. Accessed: February 2020.
Le Duc-Hung, Pham Cong-Kha, Nguyen Thi Thien Trang,
and Bui Trong Tu (2012). Parameter extraction and
optimization using levenberg-marquardt algorithm. In
2012 Fourth International Conference on Communi-
cations and Electronics (ICCE), pages 434–437.
Lee, J.-W., Kim, S.-J., and Han, S.-K. (2019). 3d visible
light indoor positioning by bokeh based optical inten-
sity measurement in smartphone camera. IEEE Ac-
cess, 7:91399–91406.
Li, X., Wang, J., Olesk, A., Knight, N., and Ding, W.
(2010). Indoor positioning within a single camera and
3d maps. pages 1 – 9.
Luo, X., O’Brien, W. J., and Julien, C. (2011). Comparative
evaluation of received signal strength index (RSSI)-
based indoor localization techniques for construction
jobsites. Adv. Eng. Inform., 25:355–363.
Lymberopoulos, D. et al. (2015). A realistic evaluation and
comparison of indoor location technologies: Experi-
ences and lessons learned. In The 14th ACM/IEEE
Conference on Information Processing in Sensor Net-
works (IPSN ’15).
Maduskar, D. and Tapaswi, S. (2017). RSSI based adap-
tive indoor location tracker. Scientific Phone Apps and
Mobile Devices, 3.
Marin, I., Bocicor, M. I., and Molnar, A. J. (2020). In-
door localization techniques within a home monitor-
ing platform. In Damiani E., Spanoudakis G., M. L.,
editor, Evaluation of Novel Approaches to Software
Engineering. ENASE 2019., volume 1172, pages 378–
401. Springer.
Marin, I., Bocicor, M. I., Molnar, A.-J., Marin, I., Vasi-
lateanu, A., Molnar, A.-J., Bocicor, M. I., Cuesta-
Frau, D., Molina-Pic
´
o, A., Goga, N., et al. (2019).
Indoor localisation with intelligent luminaires for
home monitoring. In Proceedings of the 14th In-
ternational Conference on Evaluation of Novel Ap-
proaches to Software Engineering, pages 464–471.
SCITEPRESS-Science and Technology Publications,
Lda.
Marin, I. et al. (2018). i-Light - Intelligent Luminaire Based
Platform for Home Monitoring and Assisted Living.
Electronics, 7(220).
Miao, Y., Wu, H., and Zhang, L. (2018). The accurate lo-
cation estimation of sensor node using received signal
strength measurements in large-scale farmland. Jour-
nal of Sensors, 2018:1–10.
Navigine (2020). Geolocation services for business. https:
//navigine.com/platform/. Accessed: February 2020.
Ozsoy, K., Bozkurt, A., and Tekin, I. (2013). Indoor po-
sitioning based on global positioning system signals.
Microwave and Optical Technology Letters, 55:1091–
1097.
Pointr (2020). Indoor positioning system. https://www.
pointr.tech/solutions/indoor-positioning-system. Ac-
cessed: February 2020.
Pu, C. C., Pu, C.-H., and Lee, H.-J. (2011). Indoor location
tracking using received signal strength indicator. In
Emerging Communications for Wireless Sensor Net-
works.
Qi, J. and Liu, G.-P. (2017). A robust high-accuracy ultra-
sound indoor positioning system based on a wireless
sensor network. Sensors, 17:2554.
Randell, C. and Muller, H. (2001). Low cost indoor posi-
tioning system. In International Conference on Ubiq-
uitous Computing, pages 42–48. Springer.
ENASE 2020 - 15th International Conference on Evaluation of Novel Approaches to Software Engineering
554

Robesaat, J., Zhang, P., Abdelaal, M., and Theel, O. (2017).
An improved ble indoor localization with kalman-
based fusion: An experimental study. Sensors, 17.
Sadowski, S. and Spachos, P. (2018). RSSI-based indoor
localization with the internet of things. In IEEE Ac-
cess.
Sewio (2020). Sewio uwb real-time loca-
tion system (rtls). https://www.sewio.net/
real-time-location-system-rtls-on-uwb/. Accessed:
February 2020.
Sung, Y. (2016). RSSI-based distance estimation frame-
work using a kalman filter for sustainable indoorcom-
puting environments. Sustainability, 8.
Ta, V.-C. (2017). Smartphone-based indoor positioning
using Wi-Fi, inertial sensors and Bluetooth. https://
tel.archives-ouvertes.fr/tel-01883828/document. Ma-
chine Learning, Universit
´
e Grenoble Alpes.
Trogh, J., Plets, D., Martens, L., and Joseph, W. (2015). Ad-
vanced real-time indoor tracking based on the viterbi
algorithm and semantic data. International Journal of
Distributed Sensor Networks, 11(10):271818.
WI4B (2020). Wi4b - real-time locating systems. http:
//www.wi4b.it/localization.php. Accessed: February
2020.
Wibowo, S. B., Klepal, M., and Pesch, D. (2009). Time of
flight ranging using off-the-self ieee802. 11 wifi tags.
In Proceedings of the International Conference on Po-
sitioning and Context-Awareness (PoCA’09).
Wielandt, S. and De Strycker, L. (2017). Indoor multi-
path assisted angle of arrival localization. Sensors,
17:2522.
World Health Organization (2015). World report on ageing
and health. https://apps.who.int/iris/bitstream/handle/
10665/186463/9789240694811 eng.pdf?sequence=1.
Accessed: February 2020.
Xiao, J. and Zhou, Z. (2016). A survey on wireless indoor
localization from the device perspective. ACM Com-
puting Surveys, 49.
Yu, D., Su, L., Zuo, Anfu, G., Sun, Z., and Wen (2019).
Time difference of arrival (tdoa) localization combin-
ing weighted least squares and firefly algorithm. Sen-
sors, 19:2554.
Zafari, F., Gkelias, A., and Leung, K. K. (2019). A survey
of indoor localization systems and technologies. IEEE
Communications Surveys & Tutorials, 21(3):2568–
2599.
Intelligent Luminaire based Real-time Indoor Positioning for Assisted Living
555
