
ConvPoseCNN: Dense Convolutional 6D Object Pose Estimation
Catherine Capellen, Max Schwarz
a
and Sven Behnke
b
Autonomous Intelligent Systems Group of University of Bonn, Germany
Keywords:
Pose Estimation, Dense Prediction, Deep Learning.
Abstract:
6D object pose estimation is a prerequisite for many applications. In recent years, monocular pose estimation
has attracted much research interest because it does not need depth measurements. In this work, we introduce
ConvPoseCNN, a fully convolutional architecture that avoids cutting out individual objects. Instead we pro-
pose pixel-wise, dense prediction of both translation and orientation components of the object pose, where the
dense orientation is represented in Quaternion form. We present different approaches for aggregation of the
dense orientation predictions, including averaging and clustering schemes. We evaluate ConvPoseCNN on the
challenging YCB-Video Dataset, where we show that the approach has far fewer parameters and trains faster
than comparable methods without sacrificing accuracy. Furthermore, our results indicate that the dense orien-
tation prediction implicitly learns to attend to trustworthy, occlusion-free, and feature-rich object regions.
1 INTRODUCTION
Given images of known, rigid objects, 6D object pose
estimation describes the problem of determining the
identity of the objects, their position and their orienta-
tion. Recent research focuses on increasingly difficult
datasets with multiple objects per image, cluttered en-
vironments, and partially occluded objects. Symmet-
ric objects pose a particular challenge for orientation
estimation, because multiple solutions or manifolds
of solutions exist. While the pose problem mainly
receives attention from the computer vision commu-
nity, in recent years there have been multiple robotics
competitions involving 6D pose estimation as a key
component, for example the Amazon Picking Chal-
lenge of 2015 and 2016 and the Amazon Robotics
Challenge of 2017, where robots had to pick objects
from highly cluttered bins. The pose estimation prob-
lem is also highly relevant in human-designed, less
structured environments, e.g. as encountered in the
RoboCup@Home competition Iocchi et al. (2015),
where robots have to operate within home environ-
ments.
a
https://orcid.org/0000-0002-9942-6604
b
https://orcid.org/0000-0002-5040-7525
2 RELATED WORK
For a long time, feature-based and template-based
methods were popular for 6D object pose estima-
tion (Lowe, 2004; Wagner et al., 2008; Hinterstoisser
et al., 2012a,b). However, feature-based methods
rely on distinguishable features and perform badly
for texture-poor objects. Template-based methods do
not work well if objects are partially occluded. With
deep learning methods showing success for different
image-related problem settings, models inspired or
extending these have been used increasingly. Many
methods use established architectures to solve sub-
problems, as for example semantic segmentation or
instance segmentation. Apart from that, most re-
cent methods use deep learning for their complete
pipeline. We divide these methods into two groups:
Direct pose regression methods (Do et al., 2018; Xi-
ang et al., 2018) and methods that predict 2D-3D ob-
ject correspondences and then solve the PnP problem
to recover the 6D pose. The latter can be further di-
vided into methods that predict dense, pixel-wise cor-
respondences (Brachmann et al., 2014, 2016; Krull
et al., 2015) and, more recently, methods that esti-
mate the 2D coordinates of selected keypoints, usu-
ally the 3D object bounding box corners (Oberweger
et al., 2018; Rad and Lepetit, 2017; Tekin et al., 2018;
Tremblay et al., 2018).
Oberweger et al. (2018) predict the projection of
the 3D bounding box as a heat map. To achieve ro-
162
Capellen, C., Schwarz, M. and Behnke, S.
ConvPoseCNN: Dense Convolutional 6D Object Pose Estimation.
DOI: 10.5220/0008990901620172
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
162-172
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Dense Prediction of 6D pose parameters inside
ConvPoseCNN. The dense predictions are aggregated on
the object level to form 6D pose outputs.
bustness to occlusion, they predict the heat map inde-
pendently for small object patches before adding them
together. The maximum is selected as the corner posi-
tion. If patches are ambiguous, the training technique
implicitly results in an ambiguous heat map predic-
tion. This method also uses Feature Mapping (Rad
et al., 2018), a technique to bridge the domain-gap
between synthetic and real training data.
We note that newer approaches increasingly focus
on the monocular pose estimation problem without
depth information (Brachmann et al., 2016; Do et al.,
2018; Jafari et al., 2017; Rad and Lepetit, 2017; Ober-
weger et al., 2018; Tekin et al., 2018; Tremblay et al.,
2018; Xiang et al., 2018). In addition to predicting
the pose from RGB or RGB-D data, there are several
refinement techniques for pose improvement after the
initial estimation. Li et al. (2018) introduce a render-
and-compare technique that improves the estimation
only using the original RGB input. If depth is avail-
able, ICP registration can be used to refine poses.
As a representative of the direct regression
method, we discuss PoseCNN (Xiang et al., 2018)
in more detail. It delivered state-of-the-art perfor-
mance on the occluded LINEMOD dataset and in-
troduced a more challenging dataset, the YCB-Video
Dataset. PoseCNN decouples the problem of pose
estimation into estimating the translation and orien-
tation separately. A pretrained VGG16 backbone is
used for feature extraction. The features are processed
in three different branches: Two fully convolutional
branches estimate a semantic segmentation, center di-
rections, and the depth for every pixel of the image.
The third branch consists of a RoI pooling and a fully-
connected architecture which regresses to a quater-
nion describing the rotation for each region of inter-
est.
RoI pooling – i.e. cutting out and size normaliz-
ing an object hypothesis – was originally developed
for the object detection problem (Girshick, 2015),
where it is used to extract an object-centered and
size-normalized view of the extracted CNN features.
The following classification network, usually consist-
ing of a few convolutional and fully-connected layers,
then directly computes class scores for the extracted
region. As RoI pooling focusses on individual object
hypotheses, it looses contextual information, which
might be important in cluttered scenes where objects
are densely packed and occlude each other. RoI pool-
ing requires random access to the source feature map
for cutting out and interpolating features. Such ran-
dom access patterns are expensive to implement in
hardware circuits and have no equivalent in the visual
cortex (Kandel et al., 2000). Additionally, RoI pool-
ing is often followed by fully connected layers, which
drive up parameter count and inference/training time.
Following the initial breakthroughs using RoI
pooling, simpler architectures for object detection
have been proposed which compute the class scores
in a fully convolutional way (Redmon et al., 2016).
An important insight here is that a CNN is essen-
tially equivalent to a sliding-window operator, i.e.
fully-convolutional classification is equivalent to RoI-
pooled classification with a fixed region size. While
the in-built size-invariance of RoI pooling is lost,
fully-convolutional architectures typically outperform
RoI-based ones in terms of model size and train-
ing/inference speed. With a suitably chosen loss func-
tion that addresses the inherent example imbalances
during training (Lin et al., 2017), fully-convolutional
architectures reach state-of-the-art accuracy in object
detection.
Following this idea, we developed a fully-
convolutional architecture evolved from PoseCNN,
that replaces the RoI pooling-based orientation esti-
mation of PoseCNN with a fully-convolutional, pixel-
wise quaternion orientation prediction (see Fig. 1).
Recently, Peng et al. (2019) also removed the RoI-
pooled orientation prediction branch, but with a dif-
ferent method: Here, 2D directions to a fixed num-
ber of keypoints are densely predicted. Each key-
point is found using a separate Hough transform and
the pose is then estimated using a PnP solver utiliz-
ing the known keypoint correspondences. In con-
trast, our method retains the direct orientation regres-
sion branch, which may be interesting in resource-
constrained scenarios, where the added overhead of
additional Hough transforms and PnP solving is un-
desirable.
Our proposed changes unify the architecture and
make it more parallel: PoseCNN first predicts the
translation and the regions of interest (RoI) and then,
sequentially for each RoI estimates object orientation.
Our architecture can perform the rotation estimation
for multiple objects in parallel, independent from the
translation estimation. We investigated different av-
ConvPoseCNN: Dense Convolutional 6D Object Pose Estimation
163

Figure 2: Our ConvPoseCNN architecture for convolutional pose estimation. During aggregation, candidate quaternions are
selected according to the semantic segmentation results or according to Hough inlier information. Figure adapted from (Xiang
et al., 2018).
eraging and clustering schemes for obtaining a final
orientation from our pixel-wise estimation. We com-
pare the results of our architecture to PoseCNN on the
YCB-Video Dataset (Xiang et al., 2018). We show
that our fully-convolutional architecture with pixel-
wise prediction achieves precise results while using
far less parameters. The simpler architecture also re-
sults in shorter training times.
In summary, our contributions include:
1. A conceptually simple, small, and fast-to-train ar-
chitecture for dense orientation estimation, whose
prediction is easily interpretable due to its dense
nature,
2. a comparison of different orientation aggregation
techniques, and
3. a thorough evaluation and ablation study of the
different design choices on the challenging YCB-
Video dataset.
3 METHOD
We propose an architecture derived from PoseCNN
(Xiang et al., 2018), which predicts, starting from
RGB images, 6D poses for each object in the im-
age. The network starts with the convolutional back-
bone of VGG16 (Simonyan and Zisserman, 2014)
that extracts features. These are subsequently pro-
cessed in three branches: The fully-convolutional seg-
mentation branch that predicts a pixel-wise semantic
segmentation, the fully-convolutional vertex branch,
which predicts a pixel-wise estimation of the center
direction and center depth, and the quaternion esti-
mation branch. The segmentation and vertex branch
results are combined to vote for object centers in a
Hough transform layer. The Hough layer also predicts
bounding boxes for the detected objects. PoseCNN
then uses these bounding boxes to crop and pool the
extracted features which are then fed into a fully-
connected neural network architecture. This fully-
connected part predicts an orientation quaternion for
each bounding box.
Our architecture, shown in Fig. 2, replaces the
quaternion estimation branch of PoseCNN with a
fully-convolutional architecture, similar to the seg-
mentation and vertex prediction branch. It predicts
quaternions pixel-wise. We call it ConvPoseCNN
(short for convolutional PoseCNN). Similarly to
PoseCNN, quaternions are regressed directly using
a linear output layer. The added layers have the
same architectural parameters as in the segmenta-
tion branch (filter size 3×3) and are thus quite light-
weight.
While densely predicting orientations at the pixel
level might seem counter-intuitive, since orientation
estimation typically needs long-range information
from distant pixels, we argue that due to the total
depth of the convolutional network and the involved
pooling operations the receptive field for a single out-
put pixel covers large parts of the image and thus al-
lows long-range information to be considered during
orientation prediction.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
164

3.1 Aggregation of Dense Orientation
Predictions
We estimate quaternions pixel-wise and use the pre-
dicted segmentation to identify which quaternions be-
long to which object. If multiple instances of one ob-
ject can occur, one could use the Hough inliers instead
of the segmentation. Before the aggregation of the se-
lected quaternions to a final orientation estimate, we
ensure that each predicted quaternion q corresponds
to a rotation by scaling it to unit norm. However, we
found that the norm w = ||q|| prior to scaling is of in-
terest for aggregation: In feature-rich regions, where
there is more evidence for the orientation prediction,
it tends to be higher (see Section 4.8). We investigated
averaging and clustering techniques for aggregation,
optionally weighted by w.
For averaging the predictions we use the weighted
quaternion average as defined by Markley et al.
(2007). Here, the average ¯q of quaternion samples
q
1
, ..., q
n
with weights w
1
, ..., w
n
is defined using the
corresponding rotation matrices R(q
1
), ..., R(q
n
):
¯q = arg min
q∈S
3
n
∑
i=1
w
i
||R(q) −R(q
i
)||
2
F
, (1)
where S
3
is the unit 3-sphere and || · ||
F
is the Frobe-
nius norm. This definition avoids any problems aris-
ing from the antipodal symmetry of the quaternion
representation. The exact solution to the optimiza-
tion problem can be found by solving an eigenvalue
problem (Markley et al., 2007).
For the alternative clustering aggregation, we fol-
low a weighted RANSAC scheme: For quaternions
Q = {q
1
, ..., q
n
} and their weights w
1
, ..., w
n
associ-
ated with one object this algorithm repeatedly chooses
a random quaternion ˆq ∈ Q with a probability propor-
tional to its weight and then determines the inlier set
¯
Q = {q ∈ Q|d(q, ˆq) < t}, where d(·, ·) is the angular
distance. Finally, the ˆq with largest
∑
q
i
∈
¯
Q
w
i
is se-
lected as the result quaternion.
The possibility of weighting the individual sam-
ples is highly useful in this context, since we expect
that parts of the object are more important for deter-
mining the correct orientation than others (e.g. the
handle of a cup). In our architecture, sources of such
pixel-wise weight information can be the segmenta-
tion branch with the class confidence scores, as well
as the predicted quaternion norms ||q
1
||, ..., ||q
n
|| be-
fore normalization.
3.2 Losses and Training
For training the orientation branch, Xiang et al.
(2018) propose the ShapeMatch loss. This loss cal-
culates a distance measure between point clouds of
the object rotated by quaternions ˜q and q:
SMLoss( ˜q, q) =
(
SLoss( ˜q, q) if symmetric,
PLoss( ˜q, q) otherwise.
(2)
Given a set of 3D points M, where m = |M| and
R(q) and R( ˜q) are the rotation matrices correspond-
ing to ground truth and estimated quaternion, respec-
tively, and PLoss and SLoss are defined in (Xiang
et al., 2018) as follows:
PLoss( ˜q, q) =
1
2m
∑
x∈M
||R( ˜q)x − R(q)x||
2
, (3)
SLoss( ˜q, q) =
1
2m
∑
x
1
∈M
min
x
2
∈M
||R( ˜q)x
1
− R(q)x
2
||
2
.
(4)
Similar to the ICP objective, SLoss does not penalize
rotations of symmetric objects that lead to equivalent
shapes.
In our case, ConvPoseCNN outputs a dense, pixel-
wise orientation prediction. Computing the SMLoss
pixel-wise is computationally prohibitive. First ag-
gregating the dense predictions and then calculating
the orientation loss makes it possible to train with
SMLoss. In this setting, we use a naive average, the
normalized sum of all quaternions, to facilitate back-
propagation through the aggregation step. As a more
efficient alternative we experiment with pixel-wise L2
or QLoss (Billings and Johnson-Roberson, 2018) loss
functions, that are evaluated for the pixels indicated
by the ground-truth segmentation. QLoss is designed
to handle the quaternion symmetry. For two quater-
nions ¯q and q it is defined as:
QLoss( ¯q, q) = log(ε + 1 − | ¯q · q|), (5)
where ε is introduced for stability.
The final loss function used during training is,
similarly to PoseCNN, a linear combination of seg-
mentation (L
seg
), translation (L
trans
), and orientation
loss (L
rot
):
L = α
seg
L
seg
+ α
trans
L
trans
+ α
rot
L
rot
. (6)
Values for the α coefficients as used in our exper-
iments are given in Section 4.4.
4 EVALUATION
4.1 Datasets
We perform our experiments on the challenging
YCB-Video Dataset (Xiang et al., 2018). The dataset
ConvPoseCNN: Dense Convolutional 6D Object Pose Estimation
165

contains 133,936 images extracted from 92 videos,
showing 21 rigid objects. For each object the dataset
contains a point model with 2620 points each and a
mesh file. Additionally the dataset contains 80.000
synthetic images. The synthetic images are not phys-
ically realistic. Randomly selected images from
SUN2012 (Xiao et al., 2010) and ObjectNet3D (Xi-
ang et al., 2016) are used as backgrounds for the syn-
thetic frames.
When creating the dataset only the first frame of
each video was annotated manually and the rest of
the frames were inferred using RGB-D SLAM tech-
niques. Therefore, the annotations are sometimes less
precise.
The images contain multiple relevant objects in
each image, as well as occasionally uninteresting ob-
jects and distracting background. Each object appears
at most once in each image. The dataset includes sym-
metric and texture-poor objects, which are especially
challenging.
4.2 Evaluation Metrics
We evaluate our method under the AUC P and AUC S
metrics as defined for PoseCNN (Xiang et al., 2018).
For each model we report the total area under the
curve for all objects in the test set. The AUC P variant
is based on a point-wise distance metric which does
not consider symmetry effects (also called ADD). In
contrast, AUC S is based on an ICP-like distance
function (also called ADD-S) which is robust against
symmetry effects. For details, we refer to (Xiang
et al., 2018). We additionally report the same met-
ric when the translation is not applied, referred to as
“rotation only”.
4.3 Implementation
We implemented our experiments using the PyTorch
framework (Paszke et al., 2017), with the Hough vot-
ing layer implemented on CPU using Numba (Lam
et al., 2015), which proved to be more performant
than a GPU implementation. Note that there is no
backpropagation through the Hough layer.
For the parts that are equivalent to PoseCNN we
followed the published code, which has some differ-
ences to the corresponding publication (Xiang et al.,
2018), including the application of dropout and esti-
mation of log(z) instead of z in the translation branch.
We found that these design choices improve the re-
sults in our architecture as well.
Table 1: Weighting strategies for ConvPoseCNN L2.
Method 6D pose
1
Rotation only
AUC P AUC S AUC P AUC S
PoseCNN
2
53.71 76.12 78.87 93.16
unit weights 56.59 78.86 72.87 90.68
norm weights 57.13 79.01 73.84 91.02
segm. weights 56.63 78.87 72.95 90.71
1
Following Xiang et al. (2018)
2
Calculated from the PoseCNN model published in the YCB-
Video Toolbox.
4.4 Training
For training ConvPoseCNN we generally follow the
same approach as for PoseCNN: We use SGD with
learning rate 0.001 and momentum 0.9. For the over-
all loss we use α
seg
= α
trans
= 1. For the L2 and
the QLoss we use also α
rot
= 1, for the SMLoss we
used α
rot
= 100. To bring the depth error to a sim-
ilar range as the center direction error, we scale the
(metric) depth by a factor of 100.
We trained our network with a batch size of 2 for
approximately 300,000 iterations utilizing the early
stopping technique. Since the YCB-Video Dataset
contains real and synthetic frames, we choose a syn-
thetic image with a probability of 80% and render it
onto a random background image from the SUN2012
(Xiao et al., 2010) and ObjectNet3D (Xiang et al.,
2016) dataset.
4.5 Prediction Averaging
We first evaluated the different orientation loss func-
tions presented in Section 3.2: L2, QLoss, and SM-
Loss. For SMLoss, we first averaged the quaternions
predicted for each object with a naive average before
calculating the loss.
The next pipeline stage after predicting dense ori-
entation is the aggregation into a single orientation.
We first investigated the quaternion average follow-
ing (Markley et al., 2007), using either segmentation
confidence or quaternion norm as sample weights. As
can be seen in Table 1, norm weighting showed the
best results.
Since weighting seemed to be beneficial, which
suggests that there are less precise or outlier predic-
tions that should be ignored, we experimented with
pruning of the predictions using the following strat-
egy: The quaternions are sorted by confidence and
the least confident ones, according to a removal frac-
tion 0 ≤ λ ≤ 1 are discarded. The weighted average
of the remaining quaternions is then computed as de-
scribed above. The results are shown as pruned(λ)
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
166
Table 2: Quaternion pruning for ConvPoseCNN L2.
Method 6D pose
1
Rotation only
AUC P AUC S AUC P AUC S
PoseCNN 53.71 76.12 78.87 93.16
pruned(0) 57.13 79.01 73.84 91.02
pruned(0.5) 57.43 79.14 74.43 91.33
pruned(0.75) 57.43 79.19 74.48 91.45
pruned(0.9) 57.37 79.23 74.41 91.50
pruned(0.95) 57.39 79.21 74.45 91.50
single 57.11 79.22 74.00 91.46
1
Following Xiang et al. (2018).
Table 3: Clustering strategies for ConvPoseCNN L2.
Method 6D pose Rotation only
AUC P AUC S AUC P AUC S
PoseCNN 53.71 76.12 78.87 93.16
RANSAC(0.1) 57.18 79.16 74.12 91.37
RANSAC(0.2) 57.36 79.20 74.40 91.45
RANSAC(0.3) 57.27 79.20 74.13 91.35
RANSAC(0.4) 57.00 79.13 73.55 91.14
W-RANSAC(0.1) 57.27 79.20 74.29 91.45
W-RANSAC(0.2) 57.42 79.26 74.53 91.56
W-RANSAC(0.3) 57.38 79.24 74.36 91.46
pruned(0.75) 57.43 79.19 74.48 91.45
most confident 57.11 79.22 74.00 91.46
RANSAC uses unit weights, while W-RANSAC is weighted by
quaternion norm. PoseCNN and the best performing averaging
methods are shown for comparison. Numbers in parentheses de-
scribe the clustering threshold in radians.
in Table 2. We also report the extreme case, where
only the most confident quaternion is left. Overall,
pruning shows a small improvement, with the ideal
value of λ depending on the target application. More
detailed evaluation shows that especially the symmet-
ric objects show a clear improvement when pruning.
We attribute this to the fact that the averaging meth-
ods do not handle symmetries, i.e. an average of two
shape-equivalent orientations can be non-equivalent.
Pruning might help to reduce other shape-equivalent
but L2-distant predictions and thus improves the final
prediction.
4.6 Prediction Clustering
For clustering with the RANSAC strategies, we used
the angular distance between rotations as the clus-
tering distance function and performed 50 RANSAC
iterations. In contrast to the L2 distance in quater-
nion space, this distance function does not suffer from
the antipodal symmetry of the quaternion orienta-
tion representation. The results for ConvPoseCNN
L2 are shown in Table 3. For comparison the best-
performing averaging strategies are also listed. The
weighted RANSAC variant performs generally a bit
better than the non-weighted variant for the same
inlier thresholds, which correlates to our findings
in Section 4.5. In comparison, clustering performs
slightly worse than the averaging strategies for AUC
P, but slightly better for AUC S—as expected due to
the symmetry effects.
4.7 Loss Variants
The aggregation methods showed very similar results
for the QLoss trained model, which are omitted here
for brevity. For the SMLoss variant, we report the
results in Table 5. Norm weighting improves the re-
sult, but pruning does not. This suggests that there are
less-confident but important predictions with higher
distance from the mean, so that their removal signif-
icantly affects the average. This could be an effect
of training with the average quaternion, where such
behavior is not discouraged. The RANSAC cluster-
ing methods generally produce worse results than the
averaging methods in this case. We conclude that the
average-before-loss scheme is not advantageous and a
fast dense version of SMLoss would need to be found
in order to apply it in our architecture. The pixel-wise
losses obtain superior performance.
4.8 Final Results
Figure 3 shows qualitative results of our best-
performing model on the YCB-Video dataset. We es-
pecially note the spatial structure of our novel dense
orientation estimation. Due to the dense nature, its
output is strongly correlated to image location, which
allows straightforward visualization and analysis of
the prediction error w.r.t. the involved object shapes.
As expected, regions that are close to boundaries be-
tween objects or far away from orientation-defining
features tend to have higher prediction error. How-
ever, this is nicely compensated by our weighting
scheme, as the predicted quaternion norm || ˜q|| before
normalization correlates with this effect, i.e. is lower
in these regions. We hypothesize that this is an im-
plicit effect of the dense loss function: In areas with
high certainty (i.e. easy to recognize), the network
output is encouraged strongly in one direction. In ar-
eas with low certainty (i.e. easy to confuse), the net-
work cannot sufficiently discriminate and gets pulled
into several directions, resulting in outputs close to
zero.
In Table 4, we report evaluation metrics for our
models with the best averaging or clustering method.
As a baseline, we include the PoseCNN results, com-
ConvPoseCNN: Dense Convolutional 6D Object Pose Estimation
167
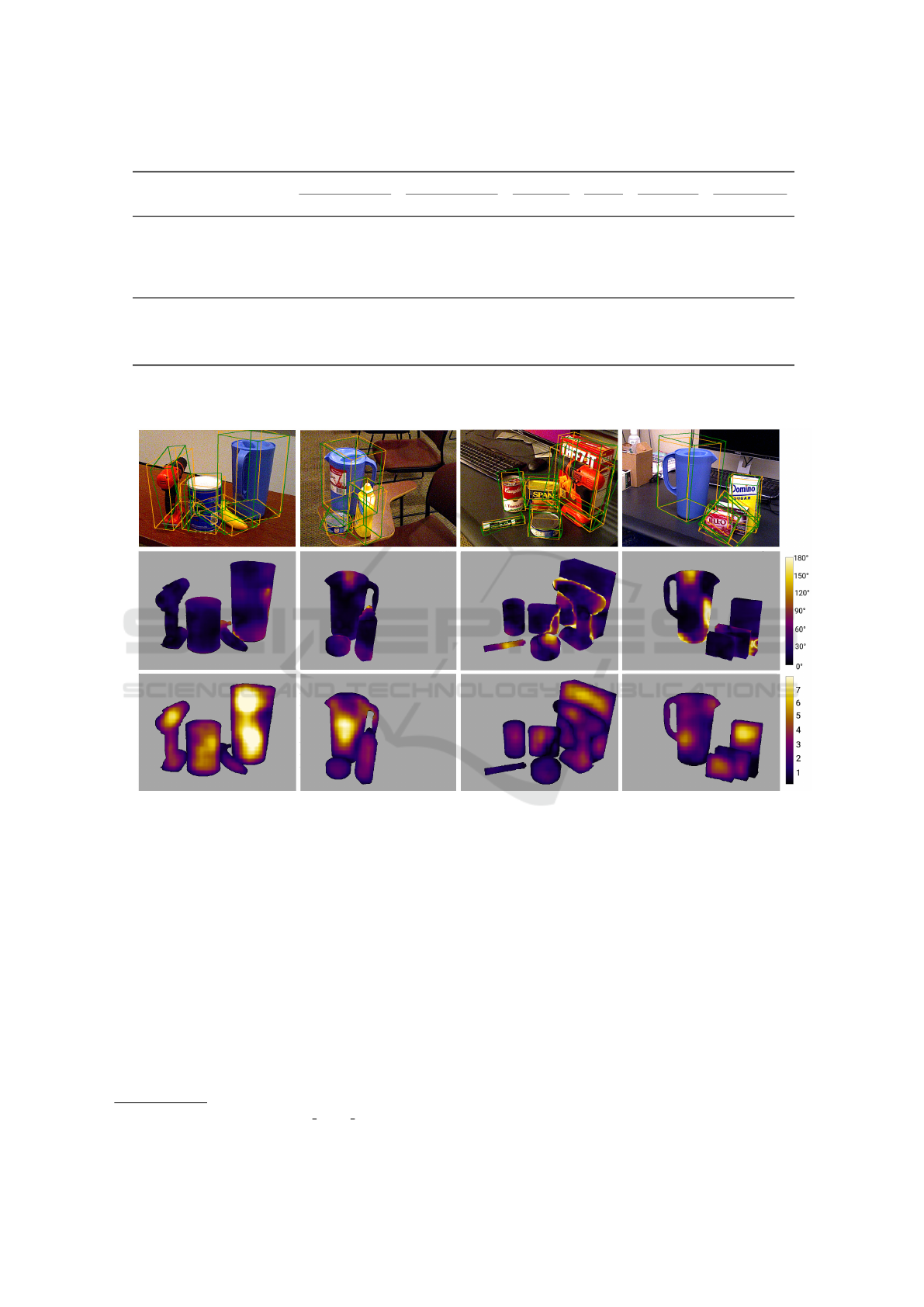
Table 4: 6D pose, translation, rotation, and segmentation results.
6D pose Rotation only NonSymC SymC Translation Segmentation
AUC P AUC S AUC P AUC S AUC P AUC S Error [m] IoU
full network
PoseCNN 53.71 76.12 78.87 93.16 60.49 63.28 0.0520 0.8369
PoseCNN (own impl.) 53.29 78.31 69.00 90.49 60.91 57.91 0.0465 0.8071
ConvPoseCNN QLoss 57.16 77.08 80.51 93.35 64.75 53.95 0.0565 0.7725
ConvPoseCNN Shape 55.54 79.27 72.15 91.55 62.77 56.42 0.0455 0.8038
ConvPoseCNN L2 57.42 79.26 74.53 91.56 63.48 58.85 0.0411 0.8044
GT segm.
PoseCNN (own impl.) 52.90 80.11 69.60 91.63 76.63 84.15 0.0345 1
ConvPoseCNN QLoss 57.73 79.04 81.20 94.52 88.27 90.14 0.0386 1
ConvPoseCNN Shape 56.27 81.27 72.53 92.27 77.32 89.06 0.0316 1
ConvPoseCNN L2 59.50 81.54 76.37 92.32 80.67 85.52 0.0314 1
The average translation error, the segmentation IoU and the AUC metrics for different models. The AUC results were achieved us-
ing weighted RANSAC(0.1) for ConvPoseCNN QLoss, Markley’s norm weighted average for ConvPoseCNN Shape and weighted
RANSAC(0.2) for ConvPoseCNN L2. GT segm. refers to ground truth segmentation (i.e. only pose estimation).
Input + PredictionOrientation ErrorPrediction Norm || ˜q||
Figure 3: Qualitative results from ConvPoseCNN L2 on the YCB-Video test set. Top: The orange boxes show the ground
truth bounding boxes, the green boxes the 6D pose prediction. Middle: Angular error of the dense quaternion prediction ˜q
w.r.t. ground truth, masked by ground truth segmentation. Bottom: Quaternion prediction norm || ˜q|| before normalization.
This measure is used for weighted aggregation. Note that the prediction norm is low in high-error regions and high in regions
that are far from occlusions and feature-rich.
puted from the YCB-Video Toolbox model
1
. We
also include our re-implementation of PoseCNN. We
achieved similar final AUCs on the test set. We also
show more detailed results with regard to translation
and segmentation of the different models. For this we
report the average translation error and the segmen-
tation IoU for all models in Table 4. They show that
there is a strong influence of the translation estimation
on the AUC losses. However, for the models with bet-
ter translation estimation, the orientation estimation is
worse.
1
https://github.com/yuxng/YCB Video toolbox
For the total as reported by PoseCNN, all
three ConvPoseCNNs have a bit higher AUC than
PoseCNN, but only the model trained with QLoss has
a similar orientation estimation to PoseCNN. Com-
pared to PoseCNN, some models perform better for
the orientation and some better for the translation
even though the translation estimation branch is the
same for all of these networks. We were interested in
the models performance with regard to the symmetric
and non-symmetric objects. For this we calculated the
class-wise average over the AUCs for the symmetric
and non-symmetric objects separately. In Table 4 we
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
168
Table 5: Results for ConvPoseCNN Shape.
6D Pose Rotation only
AUC P AUC S AUC P AUC S
PoseCNN 53.71 76.12 78.87 93.16
average 54.27 78.94 70.02 90.91
norm weighted 55.54 79.27 72.15 91.55
pruned(0.5) 55.33 79.29 71.82 91.45
pruned(0.75) 54.62 79.09 70.56 91.00
pruned(0.85) 53.86 78.85 69.34 90.57
pruned(0.9) 53.23 78.66 68.37 90.25
RANSAC(0.2) 49.44 77.65 63.09 88.73
RANSAC(0.3) 50.47 77.92 64.53 89.18
RANSAC(0.4) 51.19 78.09 65.61 89.50
W-RANSAC(0.2) 49.56 77.73 63.33 88.85
W-RANSAC(0.3) 50.54 77.91 64.78 89.21
W-RANSAC(0.4) 51.33 78.13 65.94 89.56
report them as NonSymC and SymC and report AUC
P and AUC S respectively. ConvPoseCNN performed
a bit better than PoseCNN for the non-symmetric ob-
jects but worse for the symmetric ones. This is not
surprising since QLoss and L2 loss are not designed
to handle symmetric objects. The model trained with
SMLoss also achieves suboptimal results for the sym-
metric objects compared to PoseCNN. This might be
due to different reasons: First, we utilize an average
before calculating the loss; therefore during training
the average might penalize predicting different shape-
equivalent quaternions, in case their average is not
shape-equivalent. Secondly, there are only five sym-
metric objects in the dataset and we noticed that two
of those, the two clamp objects, are very similar and
thus challenging, not only for the orientation but as
well for the segmentation and vertex prediction. This
is further complicated by a difference in object coor-
dinate systems for these two objects.
We also included results in Table 4 that were pro-
duced by evaluating using the ground truth semantic
segmentation, in order to investigate how much our
model’s performance could improve by the segmen-
tation performance alone. If the segmentation is per-
fect, then the orientation and the translation estima-
tion of all models improve. Even the re-implemented
PoseCNN improves its orientation; therefore the RoIs
must have improved by the better translation and in-
lier estimation. Even though our aim was to change
the orientation estimation of PoseCNN, our results
show that this cannot be easily isolated from the trans-
lation estimation, since both have large effects on the
resulting performance. In our experiments, further re-
balancing of the loss coefficients was not productive
due to this coupled nature of the translation and ori-
entation sub-problems.
We conclude that finding a proper balancing be-
Table 6: Comparison to Related Work.
Total Average
AUC P AUC S AUC
1
PoseCNN 53.7 75.9 61.30
ConvPoseCNN L2 57.4 79.2 62.40
HeatMaps without FM 61.41
ConvPoseCNN+FM 58.22 79.55 61.59
HeatMaps with FM 72.79
Comparison between PoseCNN (as reported by Xiang et al.
(2018)), ConvPoseCNN L2 with pruned(0.75), and HeatMaps
(Oberweger et al., 2018) without and with Feature Mapping (FM).
1
As defined by Oberweger et al. (2018).
Table 7: Detailed Class-wise Results.
Class Ours PoseCNN
AUC P AUC S AUC P AUC S
master chef can 62.32 89.55 50.08 83.72
cracker box 66.69 83.78 52.94 76.56
sugar box 67.19 82.51 68.33 83.95
tomato soup can 75.52 88.05 66.11 80.90
mustard bottle 83.79 92.59 80.84 90.64
tuna fish can 60.98 83.67 70.56 88.05
pudding box 62.17 76.31 62.22 78.72
gelatin box 83.84 92.92 74.86 85.73
potted meat can 65.86 85.92 59.40 79.51
banana 37.74 76.30 72.16 86.24
pitcher base 62.19 84.63 53.11 78.08
bleach cleanser 55.14 76.92 50.22 72.81
bowl 3.55 66.41 3.09 70.31
mug 45.83 72.05 58.39 78.22
power drill 76.47 88.26 55.21 72.91
wood block 0.12 25.90 26.19 62.43
scissors 56.42 79.01 35.27 57.48
large marker 55.26 70.19 58.11 70.98
large clamp 29.73 58.21 24.47 51.05
extra large clamp 21.99 54.43 15.97 46.15
foam brick 51.80 88.02 39.90 86.46
tween translation and orientation estimation is impor-
tant but difficult to achieve. Also, a better segmenta-
tion would further improve the results.
5 COMPARISON TO RELATED
WORK
In Table 6 we compare ConvPoseCNN L2, to the val-
ues reported in the PoseCNN paper, as well as with
a different class-wise averaged total as in (Oberweger
et al., 2018). We also compare to the method of Ober-
weger et al. (2018), with and without their proposed
Feature Mapping technique, as it should be orthog-
onal to our proposed method. One can see that our
method slightly outperforms PoseCNN, but we make
ConvPoseCNN: Dense Convolutional 6D Object Pose Estimation
169

Table 8: Training performance & model sizes.
Iterations/s
1
Model size
PoseCNN 1.18 1.1 GiB
ConvPoseCNN L2 2.09 308.9 MiB
ConvPoseCNN QLoss 2.09 308.9 MiB
ConvPoseCNN SMLoss 1.99 308.9 MiB
1
Using a batch size of 2. Averaged over 400 iterations.
no claim of significance, since we observed large vari-
ations depending on various hyperparameters and im-
plementation details. We also slightly outperform
Oberweger et al. (2018) without Feature Mapping.
Table 7 shows class-wise results.
We also investigated applying the Feature Map-
ping technique (Oberweger et al., 2018) to our model.
Following the process, we render synthetic images
with poses corresponding to the real training data. We
selected the extracted VGG-16 features for the map-
ping process and thus have to transfer two feature
maps with 512 features each. Instead of using a fully-
connected architecture as the mapping network, as
done in (Oberweger et al., 2018), we followed a con-
volutional set-up and mapped the feature from the dif-
ferent stages to each other with residual blocks based
on (1 × 1) convolutions.
The results are reported in Table 6. However, we
did not observe the large gains reported by Oberweger
et al. (2018) for our architecture. We hypothesize that
the feature mapping technique is highly dependent on
the quality and distribution of the rendered synthetic
images, which are maybe not of sufficient quality in
our case.
6 TIME COMPARISONS
We timed our models on an NVIDIA GTX 1080 Ti
GPU with 11 GB of memory. Table 8 lists the training
times for the different models, as well as the model
sizes when saved. The training of the ConvPose-
CNNs is almost twice as fast and the models are much
smaller compared to PoseCNN.
The speed of the ConvPoseCNN models at test
time depends on the method used for quaternion ag-
gregation. The times for inference are shown in Ta-
ble 9. For the averaging methods the times do not
differ much from PoseCNN. PoseCNN takes longer
to produce the output, but then does not need to per-
form any other step. For ConvPoseCNN the naive
averaging method is the fastest, followed by the
other averaging methods. RANSAC is, as expected,
slower. The forward pass of ConvPoseCNN takes
about 65.5 ms, the Hough transform around 68.6 ms.
We note that the same Hough transform implementa-
Table 9: Inference timings.
Method Time [ms]
1
Aggregation [ms]
PoseCNN
2
141.71
ConvPoseCNN
- naive average 136.96 2.34
- average 146.70 12.61
- weighted average 146.92 13.00
- pruned w. average 148.61 14.64
- RANSAC 158.66 24.97
- w. RANSAC 563.16 65.82
1
Single frame, includes aggregation.
2
Xiang et al. (2018).
tion is used for PoseCNN and ConvPoseCNN in this
comparison.
In summary, we gain advantages in terms of train-
ing time and model size, while inference times are
similar. While the latter finding initially surprised us,
we attribute it to the high degree of optimization that
RoI pooling methods in modern deep learning frame-
works have received.
7 CONCLUSION
As shown in this work, it is possible to directly
regress 6D pose parameters in a fully-convolutional
way, avoiding the sequential cutting out and normaliz-
ing of individual object hypotheses. Doing so yields a
much smaller, conceptually simpler architecture with
fewer parameters that estimates the poses of multiple
objects in parallel. We thus confirm the corresponding
trend in the related object detection task—away from
RoI-pooled architectures towards fully-convolutional
ones—also for the pose estimation task.
We demonstrated benefits of the architecture in
terms of the number of parameters and training time
without reducing prediction accuracy on the YCB-
Video dataset. Furthermore, the dense nature of the
orientation prediction allowed us to visualize both
prediction quality and the implicitly learned weight-
ing and thus to confirm that the method attends to
feature-rich and non-occluded regions.
An open research problem is the proper aggre-
gation of dense predictions. While we presented
methods based on averaging and clustering, superior
(learnable) methods surely exist. In this context, the
proper handling of symmetries becomes even more
important. In our opinion, semi-supervised methods
that learn object symmetries and thus do not require
explicit symmetry annotation need to be developed,
which is an exciting direction for further research.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
170

ACKNOWLEDGMENT
This work was funded by grant BE 2556/16-1 (Re-
search Unit FOR 2535Anticipating Human Behavior)
of the German Research Foundation (DFG).
REFERENCES
Billings, G. and Johnson-Roberson, M. (2018). SilhoNet:
An RGB method for 3D object pose estimation and
grasp planning. arXiv preprint arXiv:1809.06893.
Brachmann, E., Krull, A., Michel, F., Gumhold, S., Shotton,
J., and Rother, C. (2014). Learning 6D object pose
estimation using 3D object coordinates. In European
Conference on Computer Vision (ECCV), pages 536–
551. Springer.
Brachmann, E., Michel, F., Krull, A., Ying Yang, M.,
Gumhold, S., et al. (2016). Uncertainty-driven 6D
pose estimation of objects and scenes from a single
RGB image. In IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 3364–3372.
Do, T., Cai, M., Pham, T., and Reid, I. D. (2018). Deep-
6DPose: Recovering 6D object pose from a single
RGB image. In European Conference on Computer
Vision (ECCV).
Girshick, R. (2015). Fast R-CNN. In IEEE International
Conference on Computer Vision (ICCV), pages 1440–
1448.
Hinterstoisser, S., Cagniart, C., Ilic, S., Sturm, P., Navab,
N., Fua, P., and Lepetit, V. (2012a). Gradient re-
sponse maps for real-time detection of textureless ob-
jects. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 34(5):876–888.
Hinterstoisser, S., Lepetit, V., Ilic, S., Holzer, S., Bradski,
G., Konolige, K., and Navab, N. (2012b). Model
based training, detection and pose estimation of
texture-less 3D objects in heavily cluttered scenes. In
Asian Conference on Computer Vision (ACCV), pages
548–562. Springer.
Iocchi, L., Holz, D., Ruiz-del Solar, J., Sugiura, K., and
Van Der Zant, T. (2015). Robocup@ home: Analysis
and results of evolving competitions for domestic and
service robots. Artificial Intelligence, 229:258–281.
Jafari, O. H., Mustikovela, S. K., Pertsch, K., Brachmann,
E., and Rother, C. (2017). iPose: instance-aware 6D
pose estimation of partly occluded objects. CoRR
abs/1712.01924.
Kandel, E. R., Schwartz, J. H., Jessell, T. M., of Biochem-
istry, D., Jessell, M. B. T., Siegelbaum, S., and Hud-
speth, A. (2000). Principles of neural science, vol-
ume 4. McGraw-hill New York.
Krull, A., Brachmann, E., Michel, F., Ying Yang, M.,
Gumhold, S., and Rother, C. (2015). Learning
analysis-by-synthesis for 6D pose estimation in RGB-
D images. In International Conference on Computer
Vision (ICCV), pages 954–962.
Lam, S. K., Pitrou, A., and Seibert, S. (2015). Numba: A
LLVM-based python JIT compiler. In Second Work-
shop on the LLVM Compiler Infrastructure in HPC.
ACM.
Li, Y., Wang, G., Ji, X., Xiang, Y., and Fox, D. (2018).
DeepIM: Deep iterative matching for 6D pose esti-
mation. In European Conference on Computer Vision
(ECCV).
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. In IEEE
International Conference on Computer Vision (ICCV),
pages 2980–2988.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision (IJCV), 60(2):91–110.
Markley, F. L., Cheng, Y., Crassidis, J. L., and Oshman, Y.
(2007). Averaging quaternions. Journal of Guidance,
Control, and Dynamics, 30(4):1193–1197.
Oberweger, M., Rad, M., and Lepetit, V. (2018). Mak-
ing deep heatmaps robust to partial occlusions for 3D
object pose estimation. In European Conference on
Computer Vision (ECCV), pages 125–141.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in pytorch.
In NIPS-W.
Peng, S., Liu, Y., Huang, Q., Zhou, X., and Bao, H. (2019).
Pvnet: Pixel-wise voting network for 6dof pose es-
timation. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
4561–4570.
Rad, M. and Lepetit, V. (2017). BB8: A scalable, accu-
rate, robust to partial occlusion method for predict-
ing the 3D poses of challenging objects without using
depth. In International Conference on Computer Vi-
sion (ICCV).
Rad, M., Oberweger, M., and Lepetit, V. (2018). Feature
mapping for learning fast and accurate 3D pose infer-
ence from synthetic images. In Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In Conference on Computer Vision and
Pattern Recognition (CVPR), pages 779–788.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Tekin, B., Sinha, S. N., and Fua, P. (2018). Real-time seam-
less single shot 6D object pose prediction. In IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Tremblay, J., To, T., Sundaralingam, B., Xiang, Y., Fox, D.,
and Birchfield, S. (2018). Deep object pose estimation
for semantic robotic grasping of household objects. In
Conference on Robot Learning (CoRL).
Wagner, D., Reitmayr, G., Mulloni, A., Drummond, T., and
Schmalstieg, D. (2008). Pose tracking from natural
features on mobile phones. In Int. Symp. on Mixed
and Augmented Reality (ISMAR), pages 125–134.
ConvPoseCNN: Dense Convolutional 6D Object Pose Estimation
171

Xiang, Y., Kim, W., Chen, W., Ji, J., Choy, C., Su, H.,
Mottaghi, R., Guibas, L., and Savarese, S. (2016).
ObjectNet3D: A large scale database for 3D object
recognition. In European Conference Computer Vi-
sion (ECCV).
Xiang, Y., Schmidt, T., Narayanan, V., and Fox, D. (2018).
PoseCNN: A convolutional neural network for 6D ob-
ject pose estimation in cluttered scenes. In Robotics:
Science and Systems (RSS).
Xiao, J., Hays, J., Ehinger, K. A., Oliva, A., and Torralba,
A. (2010). SUN database: Large-scale scene recogni-
tion from abbey to zoo. In Conference on Computer
Vision and Pattern Recognition (CVPR), pages 3485–
3492.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
172
