
Deviation Prediction and Correction on Low-Cost Atmospheric
Pressure Sensors using a Machine-Learning Algorithm
Tiago C. de Araújo
1a
, Lígia T. Silva
2b
and Adriano J. C. Moreira
1c
1
Algoritmi Research Centre, Universidade do Minho, Guimarães, Portugal
2
CTAC Research Centre, Universidade do Minho, Guimarães, Portugal
Keywords: Low-Cost Sensors, Data Quality, Machine Learning, Environmental Monitoring, Collaborative Sensing.
Abstract: Atmospheric pressure sensors are important devices for several applications, including environment
monitoring and indoor positioning tracking systems. This paper proposes a method to enhance the quality of
data obtained from low-cost atmospheric pressure sensors using a machine learning algorithm to predict the
error behaviour. By using the extremely Randomized Trees algorithm, a model was trained with a reference
sensor data for temperature and humidity and with all low-cost sensor datasets that were co-located into an
artificial climatic chamber that simulated different climatic situations. Fifteen low-cost environmental sensor
units, composed by five different models, were considered. They measure – together – temperature, relative
humidity and atmospheric pressure. In the evaluation, three categories of output metrics were considered:
raw; trained by the independent sensor data; and trained by the low-cost sensor data. The model trained by
the reference sensor was able to reduce the Mean Absolute Error (MAE) between atmospheric pressure sensor
pairs by up to 67%, while the same ensemble trained with all low-cost data was able to reduce the MAE by
up to 98%. These results suggest that low-cost environmental sensors can be a good asset if their data are
properly processed.
1 INTRODUCTION
Low-cost environmental sensors have enabled
individuals to build and manage their own monitoring
system not only by its lower price, but also due to its
easy availability and extended technical support.
Therefore, when engaged individuals share a
common concern, such as the quality of the
environment, those particular monitoring artefacts,
together, can be part of a collaborative monitoring
system (Goldman et al., 2009; Zaman et al., 2014).
Collaborative sensing, either mobile or not, can be
helpful as a complementary tool in several fields of
study, such as biology (Kanhere, 2011), urban
environment and weather and local climate (D’Hondt
et al., 2013; Young et al., 2014).
The use of such sensors can help to reduce overall
costs to maintain an urban environmental monitoring
system in continuous run. A specific concern about
urban areas is the urban heat islands. The continuous
a
https://orcid.org/0000-0002-1766-5768
b
https://orcid.org/0000-0002-0199-8664
c
https://orcid.org/0000-0002-8967-118X
monitoring of environmental conditions in urban
areas can help in the assessment and in triggering
actions towards prevention or mitigation of urban
heat islands as demonstrated by (Magli et al., 2016;
Qaid et al., 2016; Salata et al., 2017) or other human-
caused local phenomena, such as air pollution.
The study of air quality is another field that has
also seen an increase in the utilization of low-cost
sensors (Kumar et al., 2015). As an example, the
authors in (Hu et al., 2016) described the design and
evaluation of an air-quality monitoring system that
uses low-cost sensors and found the performance of
the sensors to be satisfactory; the authors in (Duvall
et al., 2016) investigated the performance of low-cost
sensors for ozone and nitrogen dioxide monitoring
and its application in a community, and found that the
sensors, handled by citizen scientists, provided
consistent and positive readings in most of the
situations. Once the sensors are evaluated positively,
they can feed, for example, a local air quality
evaluation system as described by (Silva & Mendes,
de Araújo, T., Silva, L. and Moreira, A.
Deviation Prediction and Correction on Low-Cost Atmospheric Pressure Sensors using a Machine-Learning Algorithm.
DOI: 10.5220/0008968400410051
In Proceedings of the 9th International Conference on Sensor Networks (SENSORNETS 2020), pages 41-51
ISBN: 978-989-758-403-9; ISSN: 2184-4380
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
41

2012). In an indoor scenario, they can also be used for
air-quality assessment by monitoring the levels of
CO
2
, once it has relevant consequences on cognitive
performance of the occupants, as described by (Allen
et al., 2016; Satish et al., 2012). They can even be
used as a complementary asset for indoor surveillance
(Szczurek et al., 2017).
Electronic sensors are often controlled by
hardware with embedded microprocessors, such as
Arduino, Raspberry Pi or NodeMCU. Amongst these,
Arduino is, perhaps, the most popular among non-
specialized users in a citizen science scope. Several
works about Internet of Things, Environmental
Monitoring and Sensor Evaluations used Arduino as
a platform for data collection due to its ease of use
and widespread collaborative support (de Araújo et
al., 2017; Fuertes et al., 2015; Piedrahita et al., 2014;
Saini et al., 2016; Sinha et al., 2015; Trilles et al.,
2015).
However, low-cost environmental sensors cannot
be deployed into the field without minimal
verifications regarding their data-quality, even when
nominally calibrated from factory. Afterall, the value
of a running sensing system is strictly related to the
quality of its data, as scrutinized by (Liu et al., 2015).
Data quality assessment, by itself, is a difficult task,
mostly because bad quality data can be originated
from diverse sources, including a bad sensor
behaviour (Gitzel, 2016). In air quality studies, the
investigators in (Borrego et al., 2016) studied the data
quality of microsensors by comparison with reference
methods for air quality monitoring. They found that
the performance can vary from one sensor to another,
even if being of the same type. With similar results,
authors in (Castell et al., 2017) found that low-cost
sensors, despite its issues on reproducibility, can
provide very good data for lower-tie applications,
such as pollution awareness and environmental
monitoring in a coarse scale. However, improvements
are necessary if the goal is a high-accuracy
application.
Authors in (Terando et al., 2017) and (Ashcroft,
2018) discussed the errors involved in environmental
monitoring with microsensors and professional
stations. They pointed out that both approaches may
not differ in terms of error sources, since biased
temperature readings may be common in both
situations due to the lack of standardization on
thermal shields and positioning. However, despite the
technical issues involved in temperature monitoring,
the author in (Mwangi, 2017) demonstrated the
importance of low-cost sensors for building weather
stations in developing countries, places without
sufficient resources for conventional monitoring. In
the reported experiment, the sensors were first
calibrated by placing the low-cost monitoring station
close to reference instruments and, then, the artefacts
were deployed into the field, achieving good results.
The use of barometric pressure sensors in weather
monitoring is important since pressure is a good
predictor for rainfall, as it is closely related to water
evaporation rate (Özgür & Koçak, 2015). In simple
terms, low pressure values, compared to typical
values, may indicate rain, whereas high pressure
values may indicate clean weather. Beyond
environmental monitoring, atmospheric pressure has
also great importance for medical applications,
automotive industry and positioning estimation for
mobile computing (Yunus et al., 2015). In indoor and
outdoor positioning systems, barometric pressure can
provide a good estimate of altitude, since the air
pressure value is about 1013hPa at sea-level and, it
drops by approximately 0.11hPa per meter in the first
1000 meters of altitude. Thus, the enhancement of
data quality in these sensors may empower its use for
several applications.
Machine learning has also attracted the attention
of non-specialized users in citizen science projects.
Some contributing factors to its spreading are its
accessibility through built-in open-source packages,
such as “scikit-learn” for Python programming
language (Scikit-Learn, 2019), and the available
tutorials and collaborative support by other users
through web communities such as GitHub, Quora and
StackExchange. Machine learning algorithms can be
applied to sensor analysis as a powerful calibration
tool. Authors in (Yamamoto et al., 2017) used a
machine learning-based model for calibration of
temperature sensors in outdoor monitoring, and
reduced the errors of subject sensors satisfactorily.
For air quality applications, the authors in
(Zimmerman et al., 2018) used Random Forest
ensemble as a regressor between multidimensional
data for air-pollutant sensors, including cross-
sensitivity. They reached the US EPA
recommendations for air quality with the calibrated
low-cost sensors (US-EPA, 2019), highlighting a
promising strategy to overcome poor data, commonly
found in low-cost air quality sensors.
2 RESEARCH PROBLEM AND
APPROACH
The work described in this paper is part of a research
project about the use of low-cost environmental
sensors for monitoring and characterization of urban
SENSORNETS 2020 - 9th International Conference on Sensor Networks
42
spaces. Its main concern is the data quality obtained
from low-cost sensors.
The most common physical quantities observed in
environmental monitoring are air temperature,
relative humidity and atmospheric pressure. Sensors
involved in the monitoring of these quantities can
often have heterogeneous accuracy, with humidity
and pressure readings being dependent, at least, on
the temperature at which the readings were taken.
Therefore, the errors associated to the readings of a
sensor might be a function of other parameters.
Regarding the atmospheric pressure sensors, as
their transduction principle relies on the surface
deformation of the sensing element due to the
surrounding air pressure, as described by (Minh-
Dung et al., 2013), it is expected that both
temperature and humidity interfere with the sensor
readings.
These considerations lead to the hypothesis that
the errors, or deviations, from atmospheric pressure
sensor readings can be mathematically modeled from
temperature and humidity readings.
We propose the use of a supervised machine
learning algorithm in the modelling process, as
current available regressor algorithms have been
shown to be very effective in solving problems using
both linear and non-linear approximations. The
chosen machine-learning algorithm for the prediction
of errors in atmospheric pressure readings was the
Extremely Randomized Trees (Extra-trees) ensemble
regressor, first proposed by (Geurts et al., 2006), and
available in “sklearn” library for Python 3.7. This
algorithm is suitable for both linear and non-linear
systems with good accuracy and computational
efficiency.
In short terms, in the learning process the
algorithm requires both input and target vectors, so it
can “learn” the behaviour of the output (target) from
the given inputs. Once the model is trained, it can
either provide outputs using new inputs (data that
were not passed in the training process) or correct the
whole existing dataset, by feedback, to assess the
algorithm’s performance in the error prediction.
In the present approach, the input data is
composed by the temperature and humidity readings,
obtained from a set of sensors co-located and
submitted to the same environmental conditions. In
the final dataset each individual sensor data is
represented by a vector (or feature), that, together,
formed a matrix “m x n”, where “m” is the number
of reading samples (the vector length), and “n” is the
number of sensors. The target vector was obtained
from the deviations between a pair of pressure
sensors, point to point, where one of them was
considered as a beacon (a reference). Both data were
merged and then used in the training process.
Consequently, once trained, the model was able to
predict the errors between the atmospheric pressure
sensors using the temperature and humidity data as
input. The predicted error was added back into the
original pressure sensor dataset to, finally, obtain its
corrected readings.
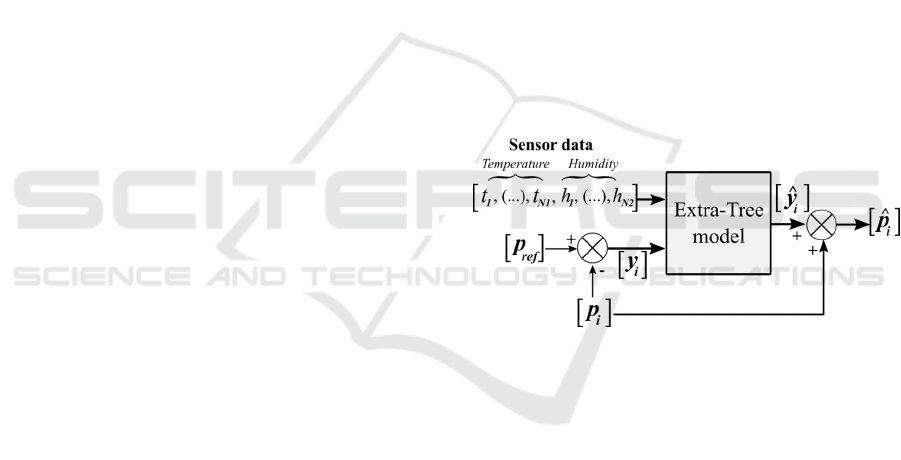
The overall process is illustrated in Figure 1, in
which: “t
1
, (…), t
N1
” are vectors containing the
temperature readings from “N
1
” different sensors;
“h
1
, (…), h
N2
” are vectors containing the humidity
sensor readings from “N
2
” different sensors; “p
ref
” is
the vector containing the readings from atmospheric
pressure sensor used as reference; “p
i
” is the vector
containing the readings from a given atmospheric
pressure sensor “i” which will have its readings
adjusted; “y
i
” is the actual error between the given
sensors (used only in the learning process); “y
” is the
output vector of the model, containing the predicted
error (a function of temperature and humidity); and,
finally, “p
” is the vector containing the corrected
atmospheric pressure sensor readings. All vectors
have length “m”.
Figure 1: Diagram of the approach adopted to predict and
correct deviations between atmospheric pressure sensors.
Moreover, machine-learning algorithms often
allow the adjustment of internal parameters that affect
its performance. The main adjustable parameters for
performance tuning in the Extra-Trees ensemble
regressor are the number of trees in the forest and the
maximum number of split nodes in the decision trees
(this last is used only in classification problems). The
choice of the number of trees has a trade-off: higher
number of trees results in better accuracy but requires
more computational resources. Usually, the default
value for this parameter is “100” and is often used as
a starting value. In case of eventual unsatisfactory
performance, it could be increased or decreased in a
fine-tuning process.
The next section contains the experimental
description that generated the datasets used in the
current investigation.
Deviation Prediction and Correction on Low-Cost Atmospheric Pressure Sensors using a Machine-Learning Algorithm
43
3 EXPERIMENTAL
The datasets used in this study were obtained from
sensors submitted to controlled conditions inside an
artificial climatic chamber (Aralab Fitoclima®) that
followed a set of instructions to create different
temperature and humidity combinations. The
following sections describe the preparation of the
sensor sets and the experimental execution plan for
the artificial climatic chamber.
3.1 Sensor Selection and Preparation
Five different models of sensors were chosen due to
its price, availability and ease of use (presence of
built-in interface): AM2302 (Adafruit, 2016),
HTU21D (Measurement Specialties Inc., 2013),
BMP180 (Bosch Sensortec, 2013), BME280 (Bosch
Sensortec, 2015) and MPL3115A2 (Freescale
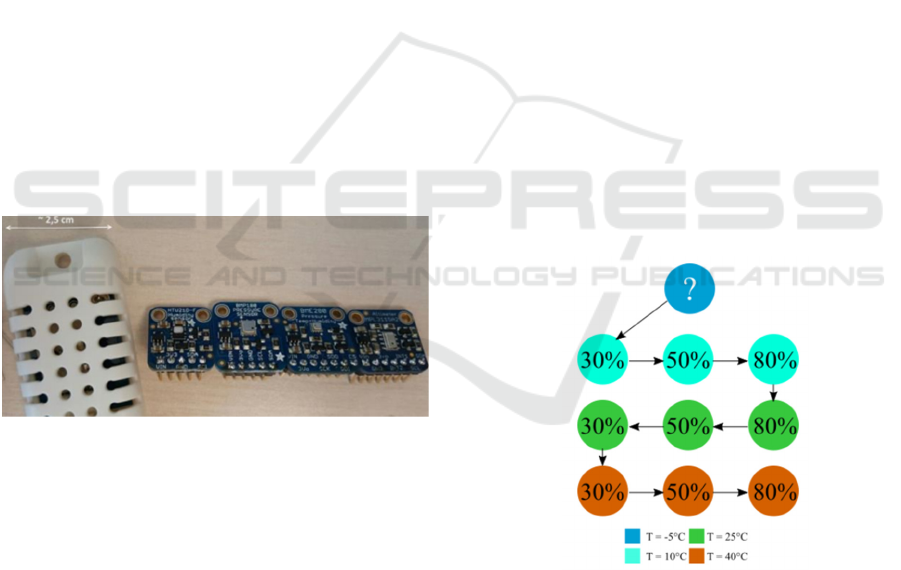
Semiconductor, 2013) (Figure 2). From these, the
BME280 provides temperature, humidity and
pressure data; AM2302 and HTU21D provide
temperature and humidity data; BMP180 and
MPL3115A2 provide temperature and pressure data.
Three units of each sensor model were used, forming
three sets containing one unit from each sensor model
(identified as Set A, Set B and Set C).
Figure 2: Low-cost sensors selected for the experiment.
From left to right: AM2302, HTU21D, BMP180, BME280
and MPL3115A2.
Each experimental set was assembled around one
Arduino device, equipped with a “SD&RTC” shield
for datalogging with timestamps. There were no
physical relevant spacing between sensors, so they
could read the same quantity values. The sampling
rate was set to one sample per minute.
An additional independent sensor from Lascar
Electronics© (Lascar Electronics, n.d.), factory-
calibrated for temperature and humidity, was also
placed together with the low-cost sensor sets inside
the chamber. Its function was to provide reference
data for later processing and to enable the comparison
of the deviation prediction performances between the
model trained with all sensors and the model trained
only with reference data. Every device was timely
synchronized to avoid reading displacements
between datasets.
3.2 Artificial Climatic Chamber
Configuration
Two experimental profiles were programmed into the
climatic chamber. The first one was programmed
with temperature levels of -5°C, 10°C, 25°C and
40°C; humidity levels of 30%, 50% and 80%. The
total experiment length was 46 hours, including: 11.5
hours for each temperature level in stability; 3 hours
for each humidity level in stability. The second
experimental profile was set by removing the
negative temperature from the first profile and
equally extending the times of each steady level. This
was performed to increase the stability time of
relative humidity and consequently reduce eventual
noise in this quantity.
The programmed execution started at the lowest
value of temperature and ended at the highest. The
relative humidity level sequence followed the scheme
presented in Figure 3. Note that, in the used chamber,
it was not possible to control relative humidity below
0°C. The readings during transitions – either
temperature or humidity – are also of interest and
were considered.
Figure 3: Temperature and humidity sequences
programmed into the artificial climatic chamber.
Those levels were chosen to attempt to cover
typical conditions of an urban environment that does
not experience extreme weather conditions.
Consequently, it should allow the assessment of the
data quality of the low-cost sensors in short-term
timespan within the given hypothetic scenario. After
the execution of all the experiments, more than 560
hours of continuous controlled readings of
SENSORNETS 2020 - 9th International Conference on Sensor Networks
44

temperature and humidity were obtained, as well as
corresponding readings of the natural atmospheric
pressure (uncontrolled), since the chamber is not
sealed.
The final dataset, generated by joining all the data
gathered from each experiment, consisted of eleven
features (columns) separated by sensor models for the
different physical quantities (with no distinction
between different sensor sets): five for temperature
and three for humidity, used entirely in the training,
and three for atmospheric pressure that were used to
form the error vectors. Also, the reference provided
three complementary features that were used in a
separate training: temperature, humidity and
dewpoint estimative.
The analysis of the final dataset and respective
metrics is described in the next section.
4 PERFORMANCE METRICS
AND DATA ANALYSIS
As previously described, the target vectors used in the
algorithm contained only the errors and were obtained
by the deviations point-to-point between two sensor
models of the pressure sensors readings by choosing
one sensor as beacon: the BME280 (since it was the
newest device, among the pressure sensors used). As
there were other two models able to provide
atmospheric pressure values, it led to two target
features vectors: y
1
and y
2
. The target vector y
1
was
obtained by subtracting the BMP180 pressure
readings from BME280 data (1), whilst the target
vector y
2
was obtained by subtracting the
MPL3115A2 pressure readings from BME280 data
(2), as follows:
(1)
(2)
As each individual sensor, by model and physical
quantity measured, was treated as one input feature
vector (except the atmospheric pressure readings, that
were used only to form the target vectors), it led into
eight input vectors, where five input vectors were
temperature readings (from AM2302, HTU21D,
BMP180, BME280 and MPL3115A2) and three input
vectors were relative humidity readings (from
AM2302, HTU21D, BME280). The second analysis
was performed using the same target vectors
generated by the pressure sensors but using only the
independent sensor readings as input (temperature,
humidity and dew point) for training the model.
In the model preparation stage, the train/test
length was set to 80/20% in all analysis, and the
number of trees of the network was set to the default
value (100). It is a common starting condition, where
– nominally – more is better. In case of an eventual
poor performance, it could be adjusted later:
increased in case of bad metrics; reduced in case of
good metrics but with slow training time.
After the training stage with 80% of the input data
(temperature, humidity and pressure deviations), the
model was first used to predict the other 20% of the
target data, mainly to check its robustness on the data
correction. The second step taken was to use the
entire input data to predict all the errors between the
pressure sensors. The output errors
,
were
added back into its correspondent sensor-deviation
data vector (BMP180 and MPL3115) to perform the
compensations (equations 3 and 4). Thus, it resulted
in five atmospheric pressure vectors: the three
original ones (BME280, BMP180 and MPL3115A2),
and two containing the new and adjusted values for
the BMP180 and the MPL3115A2 sensor models,
that were used in the metrics for the performance
evaluation.
(3)
(4)
Regarding the metrics, the evaluation of the
expected and predicted errors from the sub-datasets
originated in the train-test process (the 80%/20% split
on the dataset) were named with “TT” suffix, whilst
the datasets generated by feedbacking the predicted
error into the whole dataset were named with “FIT”
suffix. The metrics considered in the evaluation were
the Mean Absolute Error (MAE), the Mean Squared
Error (MSE) and the Root Mean Squared Error
(RMSE), which are respectively described by the
equations (5-7):
1
|
|
(5)
1
²
(6)
1
²
(7)
Deviation Prediction and Correction on Low-Cost Atmospheric Pressure Sensors using a Machine-Learning Algorithm
45
These metrics were calculated using different
datasets as follows: between original atmospheric
pressure vectors, identified as “Raw”; between train
and test sub-datasets that used low-cost sensor data
for training, identified as “LC_TT”; between train and
test sub-datasets that used independent sensor data for
training, identified as “IS_TT”; between deviation-
compensated vectors that used low-cost sensor data
for training, identified as “LC_FIT”; and between
deviation-compensated vectors that used independent
sensor readings for training, identified as “IS_FIT”.
To complement the analysis, the determination
coefficient (r²) and Spearman’s Rank-Order
Correlation Coefficient (ρ) were also obtained from
the described datasets.
5 RESULTS
The presented numeric metrics were obtained by
averaging ten executions of the Extremely
Randomized Forests ensemble regressor with the
“shuffle” feature enabled in each train/test split
process (cross-validation). This setup ensured that the
algorithm was trained and tested with different
datapoints in each execution. Table 1 presents the
achieved results in numerical terms. The datasets are
identified as aforementioned.
There was no significant discrepancy for mean
absolute errors (MAE) in raw data between the pairs
of sensors: MAE between BME280 and BMP180 is
0.7935hPa, and between BME280 and MPL3115A2
is 0.7958hPa. When the input data of the machine-
learning algorithm is only the independent sensor
data, containing temperature, humidity and dew point
estimated values, the overall MAE was reduced by
68% for BMP180 and by 26% for MPL3115A2,
reaching 0.248hPa and 0.5872hPa, respectively.
However, when all low-cost sensor readings were
considered for training the model, the error was
significantly reduced: the MAE between BME280
and BMP180 was reduced by 98.6%, while between
BME280 and MPL3115A2 was reduced by 98.9%,
reaching 0.0109hPa and 0.0086hPa, respectively.
Table 1: Numerical performance summary (hPa) obtained
from different dataset categories.
DatasetBME vs. MAE MSE RMSE
Raw
BMP180 0.7935 0.9477 0.9735
MPL3115A2 0.7958 1.0319 1.0158
IS_TT
BMP180 0.2583 0.1023 0.3198
MPL3115A2 0.6133 0.5274 0.7262
IS_FIT
BMP180 0.2480 0.0936 0.3059
MPL3115A2 0.5872 0.4794 0.6924
LC_TT
BMP180 0.0540 0.0061 0.0780
MPL3115A2 0.0427 0.0063 0.0793
LC_FIT
BMP180 0.0109 0.0012 0.0349
MPL3115A2 0.0086 0.0013 0.0355
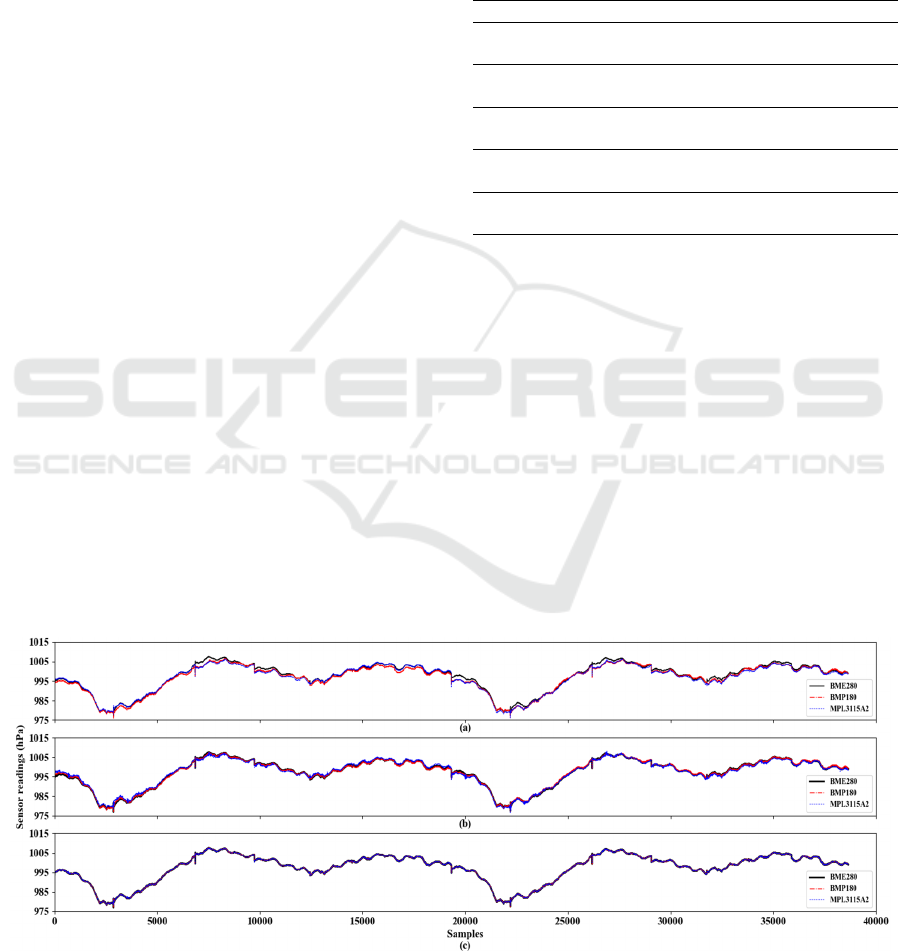
Figure 4 shows the timeseries plots containing
raw readings, the compensated values using low-cost
sensor datasets and the compensated values using
independent sensor readings. It is possible to observe
that there were no significant deviations in data
adjusted by the model that considered all low-cost
sensor data. The abrupt changes visible in the
timeseries plot was caused by appending subsequent
experimental data when the last value of the previous
experiment was different from the first value of the
subsequent one. As these anomalies occurs once after
every 2000+ samples, it does not cause significant
depreciation in numeric performance and is of no
concern.
On the contrary of the model that used all sensors,
the
adjusted
data
that
used
only
the
independent
Figure 4: Timeseries of atmospheric pressure readings: (a) raw data; (b) data adjusted by the model trained with the
independent sensor data; (c) data adjusted by the model trained with the low-cost weather sensors data.
SENSORNETS 2020 - 9th International Conference on Sensor Networks
46
sensor readings as input presented deviations that can
be visually detected at some points, suggesting that
the reduced number of input features, even from a
certified sensor, may not reach the same efficacy, for
this purpose, as a set of low-cost sensors co-located.
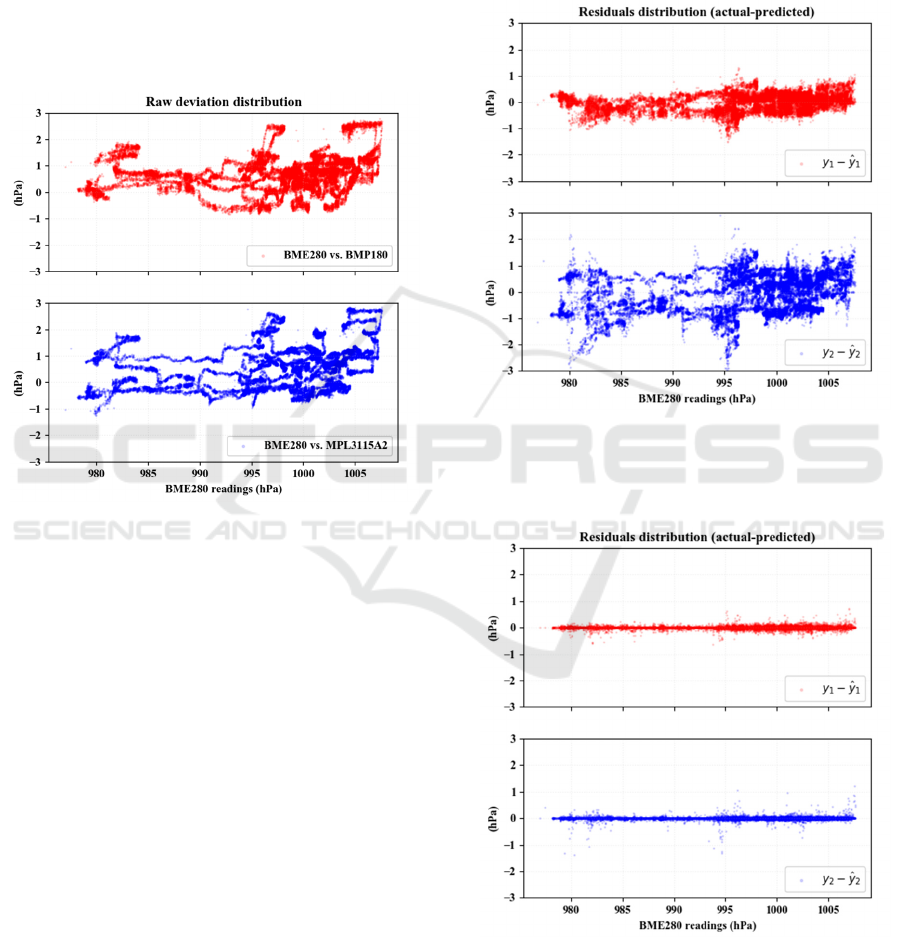
The plot containing the error scattering between
raw vectors is presented in Figure 5, and the residuals
plot (difference between predicted and actual
deviations) of the model trained with the independent
sensor and the model trained with all sensor data are
presented in Figures 6 and 7, respectively.
Figure 5: Deviation distribution of the atmospheric pressure
sensor readings as obtained (raw).
The density of the error scattering can be
interpreted by the colour intensity: faint colours
corresponds to low concentration of deviations; vivid
and solid colours corresponds to higher concentration
of deviations.
An ideal behaviour of the residuals distribution in
a fitted model would be a straight horizontal line on
zero hPa. The residuals plot of the model trained with
the independent sensor (“IS_FIT”) indicates that
there was still a random behaviour of the deviations.
However, it achieved a better performance for
BMP180 than for MPL3115A2, as shown by
comparing Figures 5 and 6.
The residuals scatterplot of the model trained with
all co-located low-cost sensor data (“LC_FIT”)
presents a very low spread around zero: a good
approximation to the ideal behaviour for a fitted
model.
The positive results obtained by the Extremely
Random Trees algorithm, when using readings from
all co-located low-cost sensors, can be extended to the
correction of outliers. Although it is still possible to
perceive the presence of few outliers in Figure 7 (the
vertically spaced points around 983hPa and 995hPa),
they were significantly reduced if compared to the
“IS_FIT” model residuals. Based on these
observations, it can be concluded that the “LC_FIT”
managed to notoriously reduce the readings
deviations.
Figure 6: Residuals distribution of Extremely Random
Trees ensemble regressor trained with temperature,
humidity and dew point estimative from independent sensor
(“IS_FIT”).
Figure 7: Residuals distribution of Extremely Random
Trees ensemble regressor trained with temperature and
humidity from co-located low-cost sensors (“LC_FIT”).
The determination coefficients (r²) and
Spearman’s rank-order correlation coefficient (ρ) of
Deviation Prediction and Correction on Low-Cost Atmospheric Pressure Sensors using a Machine-Learning Algorithm
47
the datasets, before and after the Extremely Random
Tree algorithm fitting, are exposed in Table 2. The
lowest r² was observed between BME280 and
MPL3115A2 in raw datasets, with a value of 0.9798;
the highest r² was observed in “LC_FIT” datasets,
with both vectors exceeding the 0.9999 value when
compared to BME280. The lowest ρ was also
observed between BME280 and MPL3115A2 in raw
datasets, with a value of 0.9861, and the highest ρ was
also observed in “LC_FIT” datasets, with both
vectors exceeding the value of 0.9999.
Table 2: Determination coefficients (r²) and Spearman’s
rank-order correlation coefficient (ρ) between atmospheric
pressure sensor readings before and after deviation
compensation by the machine-learning model.
Dataset
BME280 versus:
BMP180 MPL3115A2
“Raw”
r² 0.9815 0.9798
ρ 0.9909 0.9861
“IS_FIT”
r² 0.9982 0.9905
ρ 0.9982 0.9913
“LC_FIT”
r² 0.9999+ 0.9999+
ρ 0.9999+ 0.9999+
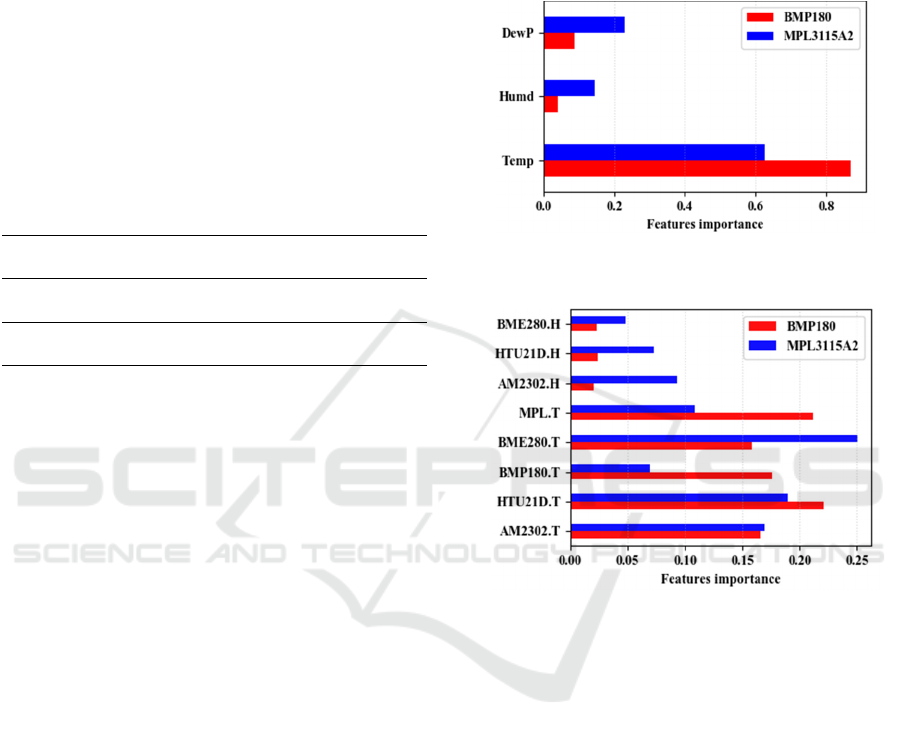
To enrich the interpretation on how the model
managed to predict the errors, it is relevant to analyse
the feature importance plot. This information can be
obtained from the Extremely Randomized Forest
model. It reveals which features had an informative
role during the training of the model and which
features do not inflict significative influence in the
outputs. In other words, and for this case, it permits
the determination of which data the error of evaluated
atmospheric pressure sensors depends on. The feature
importance plot for the model trained with the
independent sensor (“IS_FIT”) is presented in Figure
8, whilst the feature importance plot of low-cost
trained model (“LC_FIT”) is presented in Figure 9.
The interpretation of Figure 8 points out that the
BMP180 sensor deviations were mostly temperature
dependent (87% of importance), while the
MPL3115A2 deviations demonstrated to suffer
higher, yet small, influence from relative humidity
(14% of importance, versus 2.5% for BMP180). The
dewpoint, calculated by a non-linear formula that
considers both temperature and humidity, presented
relevant importance for MPL3115 deviation
predictions (above 20% of importance) while it had
no significant impact on BMP180 deviation
predictions.
Regarding the quantities dependence, the model
trained with low-cost sensors (Figure 9) agreed with
the information presented by the model trained with
the independent sensor: the sum of temperature
sensors importance resulted in 93% for the BMP180,
and humidity has no informative role (7%).
Meanwhile, the sum of humidity data importance
results in 20% for MPL3115A2, suggesting that this
variable may be considered for this sensor calibration
Figure 8: Features importance plot of input vectors used for
training the IS_FIT model.
Figure 9: Features importance plot of input vectors used for
training the LC_FIT model.
As achieved results were considered positive, no
additional hyper-parameter tuning was performed in
the machine-learning model. However, it is not
discarded that a fine tuning could enhance the
algorithm’s performance.
6 DISCUSSION AND
CONCLUSIONS
In this paper, the utilization of a set of co-located low-
cost sensors with post-processing in an accessible
machine-learning algorithm showed promising
results for atmospheric pressure sensor error
prediction, once the deviations were reduced by more
than 90% for both sensor models. The achieved
reduction on the observed deviations between the
sensors, and the consequent data quality
SENSORNETS 2020 - 9th International Conference on Sensor Networks
48

enhancement, through the utilization of machine
learning algorithms is in agreement with the studies
presented by (Yamamoto et al., 2017) and
(Zimmerman et al., 2018), which used machine
learning resources to improve the data quality from
temperature and air quality sensors, respectively.
Despite the model trained with the independent
sensor was able to reduce deviations between the
sensor pairs in acceptable levels, it still did not reach
the same performance as the model that learned the
error behaviour using the entire low-cost sensors
dataset. In a broader reasoning, the low-cost of a
given sensor might imply a trade-off on its data
quality, but the presented results point out that, if a
group of low-cost sensors is used and its data is
handled properly (e.g. synchrony, logging and data
treatment), the deviation prediction process, and its
correction, may be more effective than when just one
certified sensor is used. This observation also
corroborates with one of the main points of the
collaborative sensing that is spreading the low-cost
sensor units (fixed or mobile) to overcome the quality
of a singular sensing node. Then, it may act as a
complementary asset to help conventional methods to
address a problem, or even be a palliative in certain
situations (Giordano & Puccinelli, 2015). An
example that illustrates the low-cost sensors playing
informative role in places where conventional
methods are not available yet in large scale is the
project with low-cost weather stations for developing
countries described by (Mwangi, 2017), that used the
HTU21D and BMP180 sensors – both used in this
paper. The stations were tested in NOAA facilities
and then deployed into field in Kenya for continuous
weather monitoring in remote places. Such work can
expand into an enhanced environmental sensor
network involving the “low-cost” concept, but with
“certified” results, similar to the work presented by
(Ingelrest et al., 2010).
Regarding the analysis, the most intuitive
example of potential application from the observed
outcomes is a real time calibration service using a
previously trained machine-learning model.
Although the model was trained with offline data,
after the learning process, it can be executed online,
in real time. This is possible to be done by performing
the object serialization (or model persistence) in
Python programming language, for example. In short,
it allows the serialization (export) of an offline trained
object (e.g. the trained Extremely Random Trees
ensemble regressor used in this work) into a stream of
bytes and performs its portability (import) to other
service, such as an online server, or a middleware,
similar to the author’s proposals about data quality
improvements in (Dua et al., 2009; Fersi, 2015).
It should be highlighted that the presented results
were obtained by considering the BME280 as a
beacon (a non-certified reference). However, these
results do not show any evidence that they could not
be replicated and reach similar positive performance
if the target vectors (
and
) were obtained from a
reference sensor for atmospheric pressure instead of
a beacon sensor, since the machine learning is able to
predict the error behaviour regardless of the number
of inputs. Although the environmental dependence of
the error between atmospheric pressure sensor were
expected, since the considered physical quantities are
strictly related one to another, the Extra-Trees
algorithm would manage to pick only the features that
relevantly can describe the observed problem. In
other words, if the input had more, and even
irrelevant, features (e.g. timestamp, luminosity, etc),
the obtained results would not be different.
From this point on, some possibilities of
subsequent works can be considered, such as: a field
test (uncontrolled conditions) of the error prediction
using the approach of this work, and the consequent
evaluation of its robustness for long-term sensor use,
or its robustness over sensor positioning (spatial
variation); the investigation of the performance of this
approach when using a certified reference sensor for
atmospheric pressure as the generator for the target
vectors (instead of a beacon sensor, as
aforementioned); to assess the performance of
different machine learning algorithms for offline and
online sensor correction (e.g. Random Forests, SVM
regressor, Lasso, etc.) and different hyper parameters
tuning.
Finally, it is expected that the presented work, its
respective results, and the opened opportunities may
provide contributions or further motivations for
studies situated in the intersection zone between
citizen science, big data and environmental awareness
and monitoring, or even those beyond these areas but
which objectives eventually include the enhancement
of data quality from environmental microsensors.
REFERENCES
Adafruit. (2016). AM2302/DHT22 Datasheet (pp. 1–5). pp.
1–5. Retrieved from https://cdn-
shop.adafruit.com/datasheets/Digital+humidity+and+t
emperature+sensor+AM2302.pdf
Allen, J. G., MacNaughton, P., Satish, U., Santanam, S.,
Vallarino, J., & Spengler, J. D. (2016). Associations of
cognitive function scores with carbon dioxide,
ventilation, and volatile organic compound exposures
Deviation Prediction and Correction on Low-Cost Atmospheric Pressure Sensors using a Machine-Learning Algorithm
49

in office workers: A controlled exposure study of green
and conventional office environments. Environmental
Health Perspectives, 124(6), 805–812.
https://doi.org/10.1289/ehp.1510037
Ashcroft, M. B. (2018). Which is more biased:
Standardized weather stations or microclimatic
sensors? Ecology and Evolution, 5231–5232.
https://doi.org/10.1002/ece3.3965
Borrego, C., Costa, A. M., Ginja, J., Amorim, M.,
Coutinho, M., Karatzas, K., … Penza, M. (2016).
Assessment of air quality microsensors versus
reference methods: The EuNetAir joint exercise.
Atmospheric Environment, 147(2), 246–263.
https://doi.org/10.1016/j.atmosenv.2016.09.050
Bosch Sensortec. (2013). BMP180 Datasheet (p. 28). p. 28.
Retrieved from https://cdn-
shop.adafruit.com/datasheets/BST-BMP180-DS000-
09.pdf
Bosch Sensortec. (2015). BME280 Datasheet. Retrieved
from http://www.bosch-
sensortec.com/en/homepage/products_3/environmenta
l_sensors_1/bme280/bme280_1
Castell, N., Dauge, F. R., Schneider, P., Vogt, M., Lerner,
U., Fishbain, B., … Bartonova, A. (2017). Can
commercial low-cost sensor platforms contribute to air
quality monitoring and exposure estimates?
Environment International, 99, 293–302.
https://doi.org/10.1016/j.envint.2016.12.007
D’Hondt, E., Stevens, M., & Jacobs, A. (2013).
Participatory noise mapping works! An evaluation of
participatory sensing as an alternative to standard
techniques for environmental monitoring. Pervasive
and Mobile Computing, 9(5), 681–694.
https://doi.org/10.1016/j.pmcj.2012.09.002
de Araújo, T. C., Silva, L. T., & Moreira, A. C. (2017). Data
Quality Issues on Environmental Sensing with
Smartphones. Proceedings of the 6th International
Conference on Sensor Networks: SENSORNETS., 59–
68. https://doi.org/10.5220/0006201600590068
Dua, A., Bulusu, N., & Feng, W. (2009). Towards
Trustworthy Participatory Sensing. 4th USENIX
Workshop on Hot Topics in Security (HotSec-09).
Duvall, R., Long, R., Beaver, M., Kronmiller, K., Wheeler,
M., & Szykman, J. (2016). Performance Evaluation and
Community Application of Low-Cost Sensors for
Ozone and Nitrogen Dioxide. Sensors, 16(10), 1698.
https://doi.org/10.3390/s16101698
Fersi, G. (2015). Middleware for internet of things: A study.
Proceedings - IEEE International Conference on
Distributed Computing in Sensor Systems, DCOSS
2015, 2(3), 230–235.
https://doi.org/10.1109/DCOSS.2015.43
Freescale Semiconductor. (2013). MPL3115A2 Datasheet.
Retrieved from https://cdn-
shop.adafruit.com/datasheets/1893_datasheet.pdf
Fuertes, W., Carrera, D., Villacis, C., Toulkeridis, T.,
Galarraga, F., Torres, E., & Aules, H. (2015).
Distributed System as Internet of Things for a New
Low-Cost, Air Pollution Wireless Monitoring on Real
Time. 2015 IEEE/ACM 19th International Symposium
on Distributed Simulation and Real Time Applications
(DS-RT), 58–67. https://doi.org/10.1109/DS-
RT.2015.28
Geurts, P., Ernst, D., & Wehenkel, L. (2006). Extremely
randomized trees. Machine Learning, 63(1), 3–42.
https://doi.org/10.1007/s10994-006-6226-1
Giordano, S., & Puccinelli, D. (2015). When sensing goes
pervasive. Pervasive and Mobile Computing, 17(PB),
175–183. https://doi.org/10.1016/j.pmcj.2014.09.008
Gitzel, R. (2016). Data quality in time series data: An
experience report. CEUR Workshop Proceedings,
1753, 41–49.
Goldman, J., Shilton, K., Burke, J., Estrin, D., Hansen, M.,
Ramanathan, N., … Samanta, V. (2009). Participatory
Sensing - A Citizen-powered approach to illuminating
the patterns that shape our world. Los Angeles,
California, USA: Center for Embedded Networked
Sensing.
Hu, K., Sivaraman, V., Luxan, B. G., & Rahman, A. (2016).
Design and Evaluation of a Metropolitan Air Pollution
Sensing System. IEEE Sensors Journal, 16(5), 1448–
1459.
Ingelrest, F., Barrenetxea, G., Schaefer, G., Vetterli, M.,
Couach, O., & Parlange, M. (2010). Sensorscope:
Application-Specific Sensor Network for
Environmental Monitoring. ACM Transactions on
Sensor Networks, 6(2), 1–32.
https://doi.org/10.1145/1689239.1689247
Kanhere, S. S. (2011). Participatory Sensing:
Crowdsourcing Data from Mobile Smartphones in
Urban Spaces. 2011 IEEE 12th International
Conference on Mobile Data Management, 3–6.
https://doi.org/10.1109/MDM.2011.16
Kumar, P., Morawska, L., Martani, C., Biskos, G.,
Neophytou, M., Di Sabatino, S., … Britter, R. (2015).
The Rise of Low-Cost Sensing for Managing Air
Pollution in Cities. Environment International, 75,
199–205. https://doi.org/10.1016/j.envint.2014.11.019
Lascar Electronics. (n.d.). Certificate of Calibration.
Retrieved June 28, 2016, from
http://www.lascarelectronics.com/pdf-usb-
datalogging/data-logger0800188001331301358.pdf
Liu, L., Wei, W., Zhao, D., & Ma, H. (2015). Urban
Resolution: New Metric for Measuring the Quality of
Urban Sensing. IEEE Transactions on Mobile
Computing, 14(12), 2560–2575.
https://doi.org/10.1109/TMC.2015.2404786
Magli, S. ., Lodi, C. ., Contini, F. M. ., Muscio, A. ., &
Tartarini, P. . (2016). Dynamic analysis of the heat
released by tertiary buildings and the effects of urban
heat island mitigation strategies. Energy and Buildings,
114, 164–172.
https://doi.org/10.1016/j.enbuild.2015.05.037
Measurement Specialties Inc. (2013). HTU21D Datasheet
(pp. 1–21). pp. 1–21. Retrieved from https://cdn-
shop.adafruit.com/datasheets/1899_HTU21D.pdf
Minh-Dung, N., Takahashi, H., Uchiyama, T., Matsumoto,
K., & Shimoyama, I. (2013). A barometric pressure
sensor based on the air-gap scale effect in a cantilever.
SENSORNETS 2020 - 9th International Conference on Sensor Networks
50

Applied Physics Letters, 103(14), 103–106.
https://doi.org/10.1063/1.4824027
Mwangi, C. (2017). Low Cost Weather Stations for
Developing Countries (Kenya). 7th United Nations
International Conference on Space-Based
Technologies for Disaster Risk Reduction, (October).
Retrieved from http://www.un-
spider.org/sites/default/files/21. UNSPIDER
Presentation - Mwangi.pdf
Özgür, E., & Koçak, K. (2015). The effects of the
atmospheric pressure on evaporation. Acta
Geobalcanica, 1(1), 17–24.
https://doi.org/10.18509/agb.2015.02
Piedrahita, R., Xiang, Y., Masson, N., Ortega, J., Collier,
A., Jiang, Y., … Shang, L. (2014). The next generation
of low-cost personal air quality sensors for quantitative
exposure monitoring. Atmospheric Measurement
Techniques, 7(10), 3325–3336.
https://doi.org/10.5194/amt-7-3325-2014
Qaid, A., Bin Lamit, H., Ossen, D. R., & Raja Shahminan,
R. N. (2016). Urban heat island and thermal comfort
conditions at micro-climate scale in a tropical planned
city. Energy and Buildings, 133, 577–595.
https://doi.org/10.1016/j.enbuild.2016.10.006
Saini, H., Thakur, A., Ahuja, S., Sabharwal, N., & Kumar,
N. (2016). Arduino based automatic wireless weather
station with remote graphical application and alerts. 3rd
International Conference on Signal Processing and
Integrated Networks, SPIN 2016, 605–609.
https://doi.org/10.1109/SPIN.2016.7566768
Salata, F., Golasi, I., Petitti, D., Vollaro, E. de L., Coppi,
M., & Vollaro, A. de L. (2017). Relating microclimate,
human thermal comfort and health during heat waves:
an analysis of heat island mitigation strategies through
a case study in an urban outdoor environment.
Sustainable Cities and Society, 30, 79–96.
https://doi.org/10.1016/j.scs.2017.01.006
Satish, U., Mendell, M. J., Shekhar, K., Hotchi, T.,
Sullivan, D., Streufert, S., & Fisk, W. J. (2012). Is CO2
an indoor pollutant? direct effects of low-to-moderate
CO2 concentrations on human decision-making
performance. Environmental Health Perspectives,
120(12), 1671–1677.
https://doi.org/10.1289/ehp.1104789
Scikit-Learn. (2019). Scikit-Learn. Retrieved from
https://scikit-learn.org/stable/
Silva, L. T., & Mendes, J. F. G. (2012). City Noise-Air: An
environmental quality index for cities. Sustainable
Cities and Society, 4(1), 1–11.
https://doi.org/10.1016/j.scs.2012.03.001
Sinha, N., Pujitha, K. E., & Alex, J. S. R. (2015). Xively
based sensing and monitoring system for IoT. 2015
International Conference on Computer Communication
and Informatics, ICCCI 2015, 8–13.
https://doi.org/10.1109/ICCCI.2015.7218144
Sivaraman, V., Carrapetta, J., Hu, K., & Luxan, B. G.
(2013). HazeWatch: A participatory sensor system for
monitoring air pollution in Sydney. 38th Annual IEEE
Conference on Local Computer Networks - Workshops,
56–64. https://doi.org/10.1109/LCNW.2013.6758498
Szczurek, A., Maciejewska, M., & Pietrucha, T. (2017).
Occupancy detection using gas sensors. SENSORNETS
2017 - Proceedings of the 6th International Conference
on Sensor Networks, 2017-Janua(Sensornets), 99–107.
Terando, A. J., Youngsteadt, E., Meineke, E. K., & Prado,
S. G. (2017). Ad hoc instrumentation methods in
ecological studies produce highly biased temperature
measurements. Ecology and Evolution, 7(23), 9890–
9904. https://doi.org/10.1002/ece3.3499
Trilles, S., Luján, A., Belmonte, Ó., Montoliu, R., Torres-
Sospedra, J., & Huerta, J. (2015). SEnviro: A
sensorized platform proposal using open hardware and
open standards. Sensors (Switzerland), 15(3), 5555–
5582. https://doi.org/10.3390/s150305555
US-EPA. (2019). US EPA. Retrieved from
https://www.epa.gov/environmental-topics/air-topics
Yamamoto, K., Togami, T., Yamaguchi, N., & Ninomiya,
S. (2017). Machine learning-based calibration of low-
cost air temperature sensors using environmental data.
Sensors (Switzerland), 17(6), 1–16.
https://doi.org/10.3390/s17061290
Young, D. T., Chapman, L., Muller, C. L., Cai, X.-M., &
Grimmond, C. S. B. (2014). A Low-Cost Wireless
Temperature Sensor: Evaluation for Use in
Environmental Monitoring Applications. Journal of
Atmospheric and Oceanic Technology, 31(4),
140320111908003. https://doi.org/10.1175/JTECH-D-
13-00217.1
Yunus, N., Halin, I., Sulaiman, N., Ismail, N., & Ong, K.
(2015). Valuation on MEMS pressure sensors and
device applications. International Journal of Electrical,
Computer, Energetic, Electronic and Communication
Engineering, 9(8), 768–776.
Zaman, J., D’Hondt, E., Boix, E. G., Philips, E., Kambona,
K., & De Meuter, W. (2014). Citizen-friendly
participatory campaign support. 2014 IEEE
International Conference on Pervasive Computing and
Communication Workshops (PERCOM
WORKSHOPS), 232–235.
https://doi.org/10.1109/PerComW.2014.6815208
Zimmerman, N., Presto, A. A., Kumar, S. P. N., Gu, J.,
Hauryliuk, A., Robinson, E. S., … Subramanian, R.
(2018). A machine learning calibration model using
random forests to improve sensor performance for
lower-cost air quality monitoring. Atmospheric
Measurement Techniques, 11(1), 291–313.
https://doi.org/10.5194/amt-11-291-2018
APPENDIX
The datasets used in this work are available in the
Zenodo repository, with digital identifier (DOI) as
10.5281/zenodo.3560299.
We encourage the readers to reproduce our
findings.
Deviation Prediction and Correction on Low-Cost Atmospheric Pressure Sensors using a Machine-Learning Algorithm
51
