
Slag Removal Path Estimation by Slag Distribution and Deep
Learning
Junesuk Lee
1a
, Geon-Tae Ahn
2
, Byoung-Ju Yun
1b
and Soon-Yong Park
1c
1
School of Electronics Engineering, Kyungpook National University, Daegu, South Korea
2
Research Institute of Industrial Science and Technology, Pohang, South Korea
Keywords: Path Estimation, Deep Learning, Intelligent Robots, Industrial Robots.
Abstract: In the steel manufacturing process, de-slagging machine is used to remove slag floating on molten metal in a
ladle. In general, temperature of floating slag on the surface of the molten metal is above 1,500℃. The process
of removing such slag at high temperatures is dangerous and is only performed by trained human operators.
In this paper, we propose a deep learning method for estimating the slag removal path to automate slag
removal task. We propose an idea of developing a slag distribution image structure(SDIS); combined with a
deep learning model to estimate the removal path in an environment in which the flow of molten metal cannot
be controlled. The SDIS is given as the input into to the proposed deep learning model, which we train by
imitating the removal task of experienced operators. We use both quantitative and qualitative analyses to
evaluate the accuracy of the proposed method with the experienced operators.
1 INTRODUCTION
Recently, in the field of intelligent robotics, artificial
intelligence technology has significant research
topics (Kim. J. et al., 2018), (Cauli et al., 2018). An
intelligent robot is a robot that can recognize the
external environment and judge the situation by itself
to operate autonomously. Intelligent robots are
mainly divided into industrial robots and service
robots. Industrial robots perform dangerous,
hazardous, or simple repetitive tasks on behalf of
humans. These robots offer significant benefits in the
manufacturing industry: labor cost, productivity, and
quality. In particular, industrial robots improve the
working environment for humans. In industrial
environments, people are always threatened by
polluted air, dangerous materials, and so on.
Introducing robots into industrial environments can
consequently reduce the severity of most dangerous
effects to humans.
In steel company, various by-products/residues,
such as slag, dust, and sludge are produced when steel
is produced. Molten iron is located in the lower part
of the furnace, and by-products drift on it. To produce
a
https://orcid.org/0000-0002-1702-6720
b
https://orcid.org/0000-0002-9898-2262
c
https://orcid.org/0000-0001-5090-9667
Figure 1: System overview.
high quality steel, such residue must be removed from
the furnace. In general steel company, slag removal is
performed using a skimmer as shown in Figure 1.
Since steel production has dangerous working
environment, there is a high probability of accidents
involving human operators. This is because the
molten metal has a temperature of about 1,500℃ or
higher and the view of the metal is covered by some
dust. To protect operators getting exposed to such
dangerous conditions, automated robots capable of
performing human tasks are required.
In this paper, we propose an accurate slag
removal path estimation method which can easily be
embedded into any automated system. The system
overview of the proposed method is briefly shown in
Ladle Skimmer
Slag
Slag removal
Path estimation
Input image Slag distribution image Removal path estimation
246
Lee, J., Ahn, G., Yun, B. and Park, S.
Slag Removal Path Estimation by Slag Distribution and Deep Learning.
DOI: 10.5220/0008944602460252
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
246-252
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1, where the skimmer moves from top to
bottom along the ladle. The overview of the proposed
system has two distinctive stages: an image
transformation stage which contains slag distribution
information, and a slag removal path estimation stage
based on deep learning. The main contributions of
this paper are three-fold:
1. propose a learning model that mimics the slag
removal path of a skilled human operators to
estimate its removal path.
2. create a slag distribution image structure that
contains slag distribution information from color
images.
3. estimate the slag removal path in real-time, and
the experimental results verify the performance of
the proposed method.
The structure of this paper is organized as
follows: First, the related work is discussed in Section
2. Section 3 describes the creation of the proposed
slag distribution image and how training data can be
extracted. Section 4 describes the structure and post-
processing of the deep learning model used to predict
the slag removal path. Section 5 discusses about the
working environment and quantitative and qualitative
accuracy analyses through a few experimental results.
Finally, we conclude in Section 6.
2 RELATED WORK
In this section, we briefly discuss previous studies
which are related to automated robots of desk
cleaning, rock excavation, slag removal, and route
prediction. (Kim. J. et al., 2018) proposed a desk
cleaning technique using the iCub humanoid Robot
for cleaning graffiti and lentils from a desk. For a
robot to clean the top of a desk automatically, it must
recognize the material on the desk and estimate the
path to clean it. In this study, a human instructor
teaches the robot how to perform cleaning tasks. Task
Parametrized Gaussian Mixture Model (TP-GMM) is
used to encode the demo variables and to properly
generalize the features. However, the
parameterization of TP-GMM is very difficult
because it requires partitioning and extracting
complex images of small tables. Therefore, while the
instructor demonstrates the cleaning task, a trained
deep neural network is used to extract parameters
from the robot camera image.
(Fukui et al., 2015) discussed about an Automated
Ore Excavator. To carry out autonomous excavation
of rocks, it is necessary to recognize the state of the
fragmented rock piles and plan the appropriate
excavation operation accordingly. They proposed an
imitation-based motion planning method and
developed a rock pile condition recognizer with an
excavation motion planner. To verify the proposed
method, they developed a 1/10 scale excavation
model and conducted excavation experiments.
Experimental results showed that rock piles could be
distinguished according to surface shape and particle
distribution, where the number and the variety of
training data proved important for realizing high
productivity excavation.
(Kim. J. S. et al., 2018) conducted a study to
remove slag using a de-slagging machine. In general,
de-slagging machines can only be controlled by
trained professionals. In their research, they proposed
a method for estimating the slag removal path
automatically using CNN. They trained their network
by extracting block regions based on the actions of an
experienced specialist. They performed backtracking
and curve fitting to properly estimate the removal
path and compared with the path of the experienced
expert.
(Minoura et al., 2018) proposed a path prediction
method that takes target object attributes and physical
environment information into account. Previous path
prediction methods using deep learning architecture
took into account the physical environment of a single
target, such as a pedestrian. However, they proposed
a route prediction method that could consider
multiple target types. The method represents the
attributes as one-hot vectors and encodes the physical
attributes through convolutional layers. Furthermore,
we used relative coordinates as the past motion
history of prediction targets. They verified the
proposed method using the Stanford drone dataset.
3
TRAINING DATA ACQUISITION
3.1 Slag Distribution Image Generation
In slag removal task, an area with high slag
distribution is removed first. The reason is that high
slag distribution means that the slag is concentrated
in the area. By removing dense slag areas, it results in
efficient removal task.
In this section, we discuss the design architecture
of the slag distribution image which is proposed to
train our deep learning network (Figure 2). It consists
of 3 channels: grayscale, morphology, and distance
transform images. In addition, it also contains
information that can be used to distinguish the inside
and outside of the ladle. In our method, we determine
that the slag exists only inside the inner part of the
Slag Removal Path Estimation by Slag Distribution and Deep Learning
247
ladle and the skimmer is moved only within this area.
We also generate a binary ladle image, which consists
of zero and one as shown in Figure 3. The inside of
the ladle is labeled as 1 and the outside is 0.
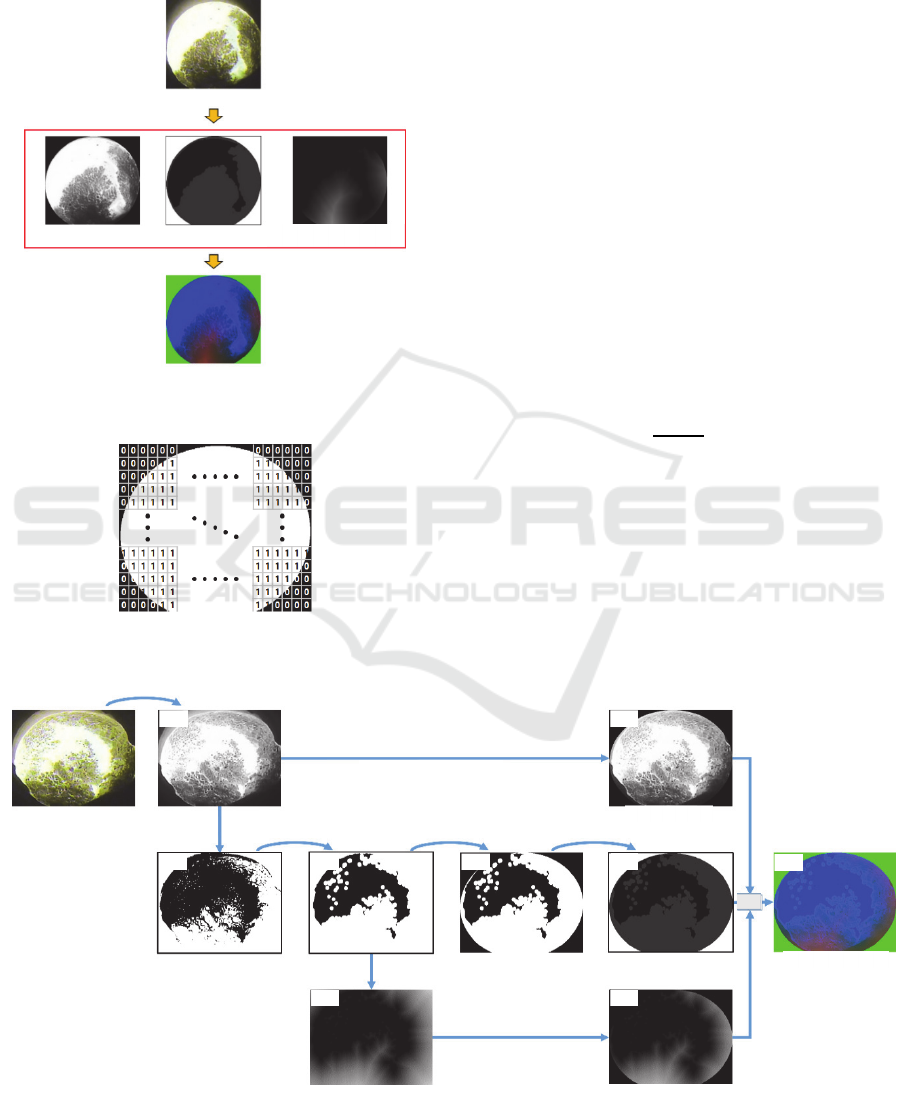
Figure 2: Slag distribution image.
Figure 3: binary ladle image.
Figure 4 shows how the slag distribution image is
created and how it is converted from an input color
image. First, we convert the input RGB image into
grayscale (Figure 4(a)) and perform the Hadamard
multiplication using the binary ladle image. This
operation results in zero value outside the ladle area
in the converted grayscale image (Figure 4(b)). The
operator ‘◦’ in Figure 4 represents the Hadamard
multiplication operation.
After getting the inverse binary image from the
converted grayscale image, we apply the opening
morphology operation (erosion and dilation) as
shown in Figure 4(d). We used a 3x3 kernel for
erosion and a 9x9 kernel for dilation, respectively.
This morphology operation not only removes small
slag chunks but also fills holes in large chunks. Next,
we perform the Hadamard multiplication on Figure
4(d) with the binary ladle image. Next, we multiply
the figure 4(e) by 0.2 scale and add the output of the
function 𝐺(ladle binary image). The final result of the
morphology operation is shown in Figure 4(f).
Function 𝐺
𝑥
is the same as Equation 1. Operation
symbol ⊕ means bit XOR operation.
𝐺
𝑥
=𝑥⊕𝑥
∗ 255
(1)
To generate the distance transform image, we first
apply the distance transform algorithm (Felzenszwalb
and Huttenlocher, 2012) on Figure 4(d). The
Hadamard multiplication is applied on Figure 4(g) to
distinguish between inside and outside of the ladle.
Finally, we merge the grayscale, morphology, and
distance transform images to create the slag
distribution image as shown in Figure 4(i). The three
Figure 4: Pipeline for constructing the proposed slag distribution image.
Ori
g
inal ima
g
e
Gra
y
ima
g
e
Mor
p
holo
gy
ima
g
e
Distance transform image
Sla
g
d
Sla
g
∘ Binary ladle image
Merge
∘ Binary ladle image
Original image
Inverse binarization Morphology operation
Distance transform
∘ Binary ladle image
Morphology image
Distance transform image
Slag distribution image
×0.2𝐺
Binary ladle image
Convert grayscale image
Grayscale image
(a) (b)
(c) (d) (e) (f)
(g) (h)
(i)
Operation symbol ∘ : Hadamard multiplication
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
248
separate channels in this slag distribution image
resemble the BGR channels in a general color image.
3.2 Proposed Training Data Format
and Data Acquisition Method
In this paper, we use a learning-based algorithm to
solve the slag removal path estimation problem. In the
proposed method, we equally divide the height (y-
coordinate) of the slag distribution image into 24
fixed intervals as shown in Figure 5. We perform the
learning and estimating processes only along the x-
coordinate. Fixing the y-coordinate reduced the total
computational cost and increased the efficiency of the
path estimation problem.
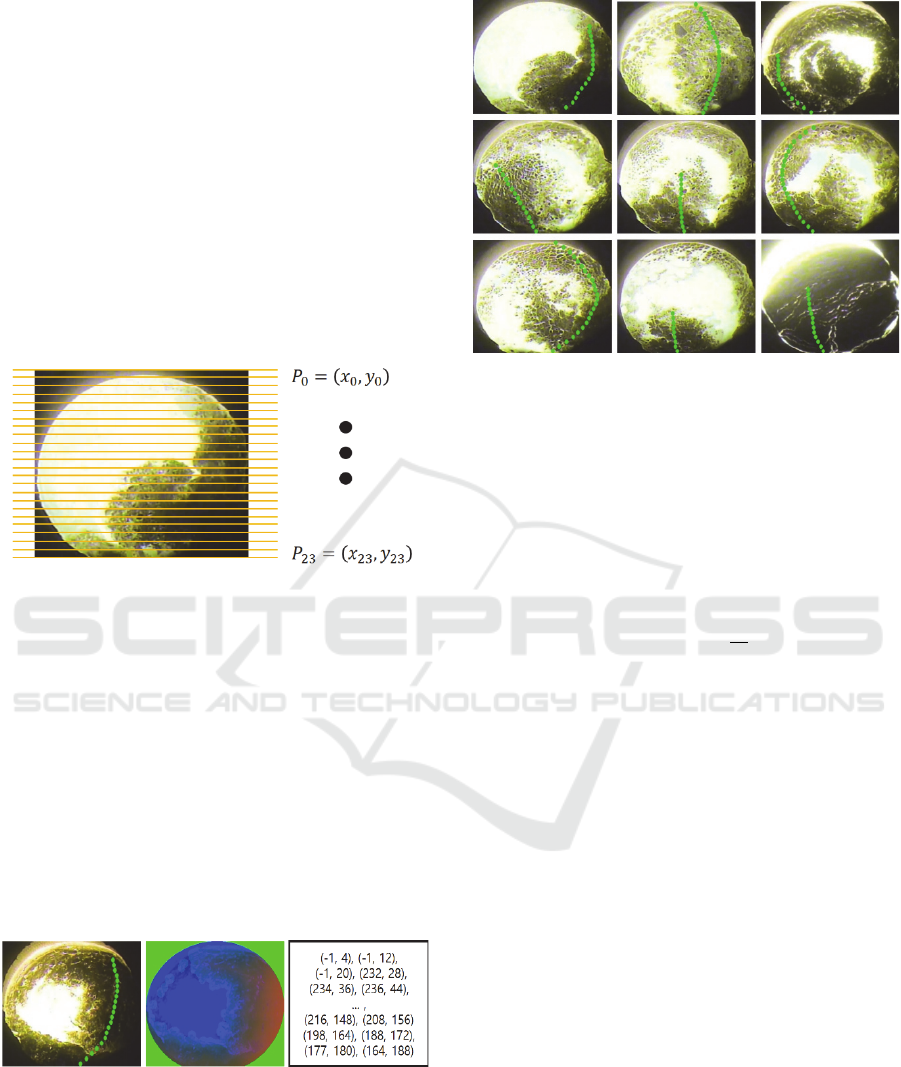
Figure 5: Proposed training data format.
To train our network, we collect training data by
imitating the removal path of a skilled human
operator. An example of a collected dataset is shown
in Figure 6. The left side shows a recorded removal
path, the middle is the slag distribution image, and the
right is a 2D slag removal path-vector that stores the
coordinates of the recorded control points. We use the
slag distribution image and the 2D path vector to train
our deep learning model. After training our network,
we use only the slag distribution image in the test
phase. Some examples of manual path recording are
shown in Figure 7, which will be used in later
sections.
(a) (b) (c)
Figure 6: Training data, (a) Removal path visualization
image (b) Training image (c) Removal path vector.
Figure 7: Acquisition of human operator’s removal path.
The slag removal path-vector 𝑃
𝑥,𝑦
can be
defined mathematically as in Equation (2). In this
equation, 𝑤 and ℎ represent the width and height of
the training image. 𝑥, 𝑦, and 𝑖 are of an integer data
type. If slag removal is not need in the 𝑖-th vector
position, we set its x-coordinate to -1. The green
points in Figure 7 are displayed only if this condition
is satisfied.
𝑃
𝑥,𝑦
=
𝑥,𝑦
0≤𝑥<𝑤,
𝑦=
ℎ
24
∗𝑖,
0≤𝑖<24
(2)
4 SLAG REMOVAL PATH
ESTIMATION
4.1 Deep Network Architecture
The network structure proposed in this research is
shown in Figure 8. We use the ResNet50 model's Skip
connection (He et al., 2016) to minimize gradient
vanishing problem. When training the network, we
use both the slag distribution image and x-coordinates
of the 2D vector as the inputs. Our network model
outputs the respective x-coordinate value
corresponding to each y-coordinate. The input image
size is 288x192x3, and the output of the trained
network model is 24x1x1, which means the 24 x-
coordinate values. We use a total of 25 layers to create
the proposed network. All convolution layers in the
proposed network use elu-activation (Clevert et al.,
2015) and zero-padding. A key point of the proposed
network is that the filter size of all convolution is 5x5.
In general, the object recognition problem using deep
learning uses a convolution filter size of 3x3.
Slag Removal Path Estimation by Slag Distribution and Deep Learning
249
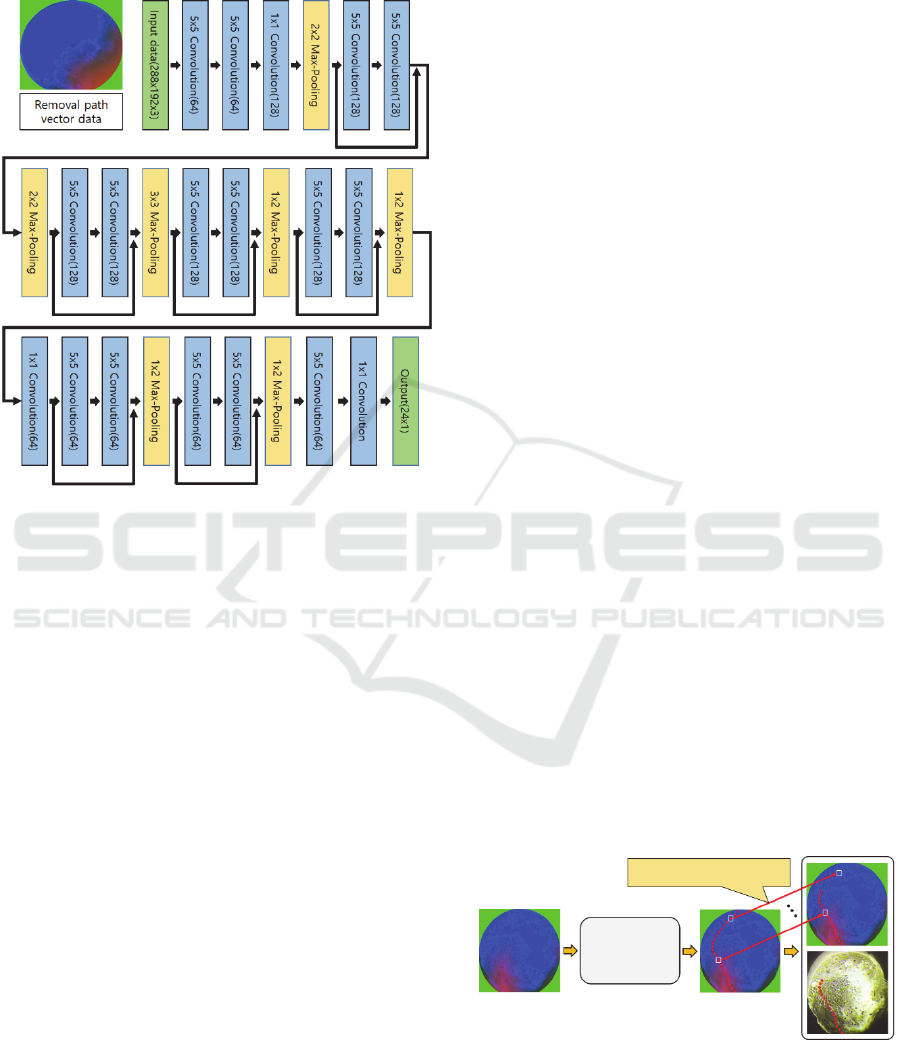
However, since it is important to recognize the
distribution of slag, we use a large filter size to
observe a larger area.
Figure 8: Proposed network model for slag removal path
estimation.
4.2 Loss Function
In this paper, we use the loss function as shown in
Equation (3) to train our network. This loss function
consists of two loss-terms. 𝜆 is a constant parameter
for fine-tuning the weight for each term. In this paper,
𝜆
is set to 10 and 𝜆
is set to 1.
𝑙𝑜𝑠𝑠
_
=𝜆
𝑙𝑜𝑠𝑠
𝜆
𝑙𝑜𝑠𝑠
(3)
𝑙𝑜𝑠𝑠
=
‖
𝑣
𝑡
𝑥
‖
(4)
𝑣
=
1, 𝑖𝑓 𝑡
1
0, 𝑒𝑙𝑠𝑒
(5)
𝑙𝑜𝑠𝑠
is an expression for finding weight values
optimized for training data. In 𝑙𝑜𝑠𝑠
, 𝑀 means the
number of output elements. The proposed network
outputs 24 x-coordinate values, so we set 𝑀 to 23. 𝑡
means the answer label. 𝑥
means the output of the
network. 𝑣
is a variable that excludes the control
point whose x coordinate point is -1 on the answer
label. 𝑣
is defined as in Equation (5).
𝑙𝑜𝑠𝑠
=
‖
𝑥
2∗𝑥
𝑥
‖
(6)
𝑙𝑜𝑠𝑠
is defined by Equation (6).
𝑙𝑜𝑠𝑠
is an expression that minimizes the
difference in magnitude between the values of listed
𝑥-coordinates. In other words, it is a formula that
minimizes the curvature of the slag removal path.
This equation is necessary because the curvature of
the slag removal path is large when a human operator
removes slag. That is, the formula is to make an
output value 𝑥
that minimizes the difference
between 𝑥
and 𝑥
and the difference between
𝑥
and 𝑥
.
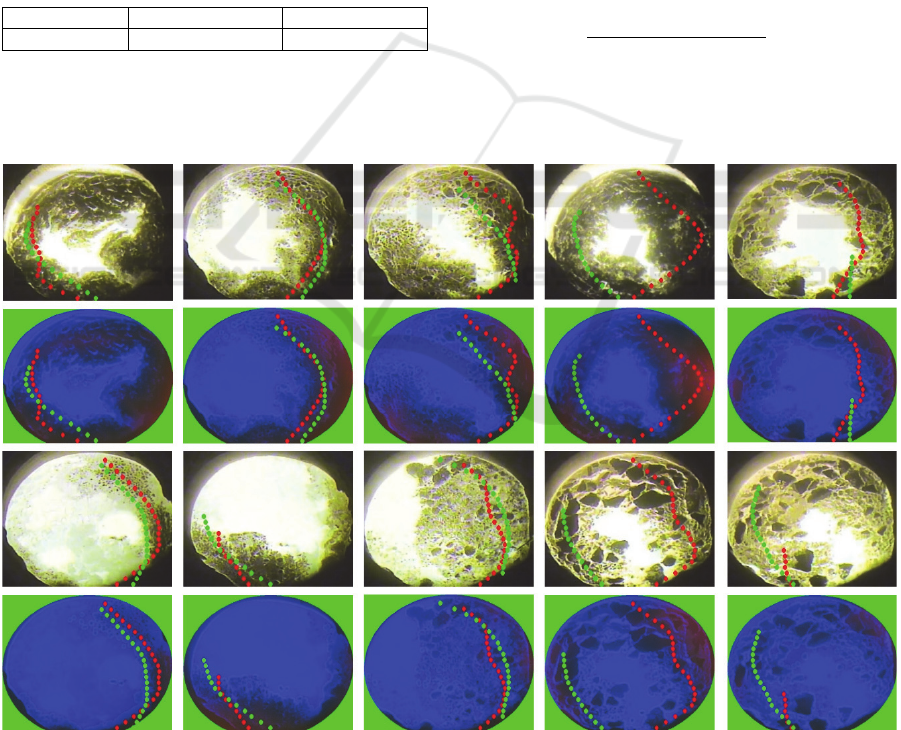
4.3 Path Estimation
The proposed slag removal path estimation model
yields 24 values for the x-coordinate. These output
values correspond to the 24-equally spaced y-
coordinate values, as described in Section 3.2. As
shown in Figure 7, the number of control points are
sometimes 24 or less depending on the distribution of
slag. To decide the removal path along only in the
image areas covered by slag, output points in the de-
slag area should be removed. In this paper, such
inefficient slag removal path coordinates are
excluded as shown in Figure 9. The exclusion steps
of inefficient removal path coordinates are as follows:
1) In the grayscale channel of the slag distribution
image, we search the intensity values of control
points in the order from the top (𝑘=0) to bottom
( 𝑘=23 ).
2) If the intensity of a control point is less than 𝛾, this
area is considered to be the area where slags exist.
𝛾 is the intensity threshold value for the slag area.
We define ℎ as the lowest index number among
the control points where the slag exists.
3) We extract the ℎ
th
to 𝑘
th
as the final slag removal
path.
Figure 9: Exclusion of unnecessary control points.
Removal inefficient control-points
Slag removal path
estimation model
Input image
Initial removal path
Final slag removal path
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
250
5 EXPRIMENTAL RESULTS
We have done experiments using many ladle images
to verify the performance of the proposed slag
removal path estimation method. When performing
these experiments, we used Windows-10 (64 bit) and
an NVIDIA Titan XP graphics card. Also, our
implementation uses the Keras-GPU library. To train
the proposed network model for slag removal path
estimation, we use a large number of training data as
shown in Table 1. We assign a high weight to the
training data count as there is not enough dataset. We
use the Adadelta optimizer method (Zeiler, 2012) to
train the proposed network model. We set the batch
size to 100 and the learning rate to 0.8 in the learning
options.
Table 1: Number of Training, Validation and Test set.
Training set Validation set Test set
1,110 139 139
Figure 10 is a comparison between the estimated
removal paths from the proposed method with those
of experienced operators, which we define as the GT
(Ground Truth).
The experimental results are analysed by both
qualitative and quantitative ways. First, qualitative
analysis is as follows. In Figure 10, (a), (b), and (c)
estimated slag removal paths look similar to GT.
However, the result in Figure 10(d) differs from the
GT, it estimates the best efficient path. Figure 10(e)
shows bad performance compared with GT.
As quantitative analyses, we evaluate the amount
of slag removal in the image. We compare the
estimated removal path with the amount of slag
removed from the GT. Slag removal is measured by
the amount of slag inside the 3x3 kernel at the all the
control points. The measurement method counts the
intensity value of less than 𝛾 in the grayscale channel
of the slag distribution image. We measure the slag
removal of 89 images and compare the proposed
method using Equation (7). The average % of slag
removal of the proposed method is about 77.33%
compared with GT.
𝑆
=
× 100
(7)
The processing time of the proposed method is
shown in Table 2. The conversion time from the input
image to the generation of the proposed slag
distribution
image takes 28ms. Slag removal path
(a) (b) (c) (d) (e)
Figure 10: Slag removal path estimation results of various ladle images: Green dots are the result of an experienced
professional (Ground Truth), RED dots are the estimated result of the proposed method.
Slag Removal Path Estimation by Slag Distribution and Deep Learning
251

estimation takes 9ms to process. Therefore, the total
average processing time is 37ms.
Table 2: Processing time.
Convert to Slag
distribution ima
g
e
Slag removal path
estimation
28ms
(
35.71 f
p
s
)
9ms
(
111.11 f
p
s
)
6 CONCLUSIONS
In this paper, we propose an efficient slag removal
path estimation method based on a deep learning
network. We introduce a slag distribution image
structure, which includes 3-channel slag distribution
information. This image is used as the input of the
network, which was trained by slag removal path
information by experienced human operators. We
obtain optimal slag removal path information through
the outputs of the network, and apply post-processing
techniques to remove invalid control points from the
output of the trained model. In experiments, we
visualize that the estimated slag removal path has an
average of 77.33% performance enhancement
compared to the manually recorded path. The total
average processing time is about 37ms, ensuring its
real-time capabilities.
ACKNOWLEDGEMENTS
This work was supported by 'The Cross-Ministry
Giga KOREA Project' grant funded by the Korea
government(MSIT) (No.GK17P0300, Real-time 4D
reconstruction of dynamic objects for ultra-realistic
service)
This research was supported by the National Research
Foundation of Korea (NRF) funded by the Korea
government (MSIT: Ministry of Science and ICT)
((No. 2018M2A8A5083266))
REFERENCES
Kim, J., Cauli, N., Vicente, P., Damas, B., Cavallo, F. and
Santos-Victor, J., 2018, April. “iCub, clean the table!”
A robot learning from demonstration approach using
Deep Neural Networks. In 2018 IEEE International
Conference on Autonomous Robot Systems and
Competitions (ICARSC), pages. 3-9. IEEE.
Cauli, N., Vicente, P., Kim, J., Damas, B., Bernardino, A.,
Cavallo, F. and Santos-Victor, J., 2018. Autonomous
table-cleaning from kinesthetic demonstrations using
Deep Learning. In Joint IEEE International Conference
on Development and Learning (ICDL) and Epigenetic
Robotics (EpiRob). IEEE.
Fukui, R., Niho, T., Nakao, M. and Uetake, M., 2015.
Imitation-based control of automated ore excavator to
utilize human operator knowledge of bedrock condition
estimation and excavating motion selection. In 2015
IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pages. 5910-5916. IEEE.
Kim, J. S., Ahn, G. T., Park. S. Y., 2018. A Block-based
Path Recognition of Slag Removal Using
Convolutional Neural Network. In 2018 International
Conference on Pattern Recognition and Artifical
Intelligence (ICPRAI).
Minoura, H., Hirakawa, T., Yamashita, T. and Fujiyoshi, H.,
2018. Path Predictions using Object Attributes and
Semantic Environment. In 14th International
Conference on Computer Vision Theory and
Applications (VISIGRAPP), pages. 19-26.
Felzenszwalb, P.F. and Huttenlocher, D.P., 2012. Distance
transforms of sampled functions. Theory of computing,
volume 8.1, pages.415-428.
He, K., Zhang, X., Ren, S. and Sun, J., 2016. Deep residual
learning for image recognition. In Proceedings of the
IEEE conference on computer vision and pattern
recognition, pages. 770-778.
Clevert, D.A., Unterthiner, T. and Hochreiter, S., 2015. Fast
and accurate deep network learning by exponential
linear units (elus). arXiv preprint arXiv:1511.07289.
Zeiler, M.D., 2012. ADADELTA: an adaptive learning rate
method. arXiv preprint arXiv:1212.5701.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
252
