
Discrete Pigeon Inspired Simulated Annealing Algorithm and
Contract Net Algorithm based on Multi-objective Optimization for
Task Allocation of UAV Formation
Xuzan Liu
1
, Yu Han
2, 3
, Jian Chen
1*
, Yi Cao
1
and Shubo Wang
1
1
College of Engineering, China Agricultural University, 17 Qinghua East Rd., Beijing, China
2
College of Water Resources & Civil Engineering, China Agricultural University, 17 Qinghua East Rd., Beijing, China
3
State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University,
129 Luoyu Rd., Wuhan 430079, China
Keywords: Task Allocation, Multi-objective Optimization, Multi-Unmanned Aerial Vehicles, Discrete Pigeon-inspired
Optimization-Simulated Annealing Algorithm, Contract Net Algorithm.
Abstract: In this paper, a mathematical model of multi-objective optimization under complex constraints is established
to solve the task allocation problem. Among them, the constraint indexes include UAV quantity constraint
and fuel consumption constraint; the optimization objectives include the gain, loss and fuel consumption.
Discrete Pigeon Inspired Optimization-Simulated Annealing (DPIO-SA) algorithm is proposed to solve this
problem. The experimental results show that while the total fitness reaches the optimum, the gain is the largest,
the loss and fuel consumption are the smallest. After running the algorithm 30 times. The number of times
that DPIO-SA reaches the global optimum is 15, while DPIO is 2. In addition, the average value of DPIO-SA
after stabilization is 13.5% larger than that of DPIO. Both prove that after joining SA, the algorithm is easier
to reach the global extremum. The Contract Net Algorithm (CNA) is adopted to solve the task scheduling
problem. The UAVs are divided into tenderer UAV, potential bidder UAVs, bidder UAVs and winner UAV.
After network communication, suitable bidder UAV is found to replace tenderer UAV to perform the task.
Experimental results show that the algorithm has good applicability.
1 INTRODUCTION
Multi-Unmanned Aerial Vehicles (UAVs)
cooperative task allocation is a process that multi
UAVs are divided into small-scale formation and
assigned to different tasks according to a set of
specific constraints to achieve some optimal or sub
optimal performance (Zong et al., 2017).
The mathematical model of task allocation is
mainly divided into centralized model and distributed
model. The centralized task allocation model includes
Multi-dimensional Traveling Salesman Problem,
Vehicle Routing Problem model, Multi-Dimensional
Dynamic Network Flow Optimization model, Multi-
dimensional Multi-choice Backpack Problem model
and the improvement of related models (Chen and
Qiao, 2016). Distributed task allocation includes
contract net model, auction algorithm model, et al.
Task allocation has been proved to be a NP hard
problem (Qi et al., 2019). At present, many
algorithms have been used to solve this problem,
including Particle Swarm Optimization algorithm
(PSO), Simulated Annealing (SA) algorithm, Tabu
search algorithm and so on. In recent years, various
bio-optimization algorithms have emerged, such as:
Ant Colony Optimization (ACO), Artificial Fish
Swarm algorithm (AFSA) , Pigeon-Inspired
Optimization (PIO) and so on. ACO uses information
feedback mechanism to move towards a better
solution through the exchange of information
between individuals. But the search time is long and
sensitive to initialization values. If the initial value is
not selected properly, it is easy to fall into local
extremum (Ratanavilisagul et al., 2017). AFSA
imitates the five behaviours of the fish swarm:
selection, search, swarm, follow and bulletin. It is
helpful to solve real-time problems, but often cannot
get accurate solutions (Zainal et al., 2015). PIO
algorithm was proposed by Duan in 2014 (Duan and
Qiao, 2014). At first, it is used to solve the problem
176
Liu, X., Han, Y., Chen, J., Cao, Y. and Wang, S.
Discrete Pigeon Inspired Simulated Annealing Algorithm and Contract Net Algor ithm based on Multi-objective Optimization for Task Allocation of UAV Formation.
DOI: 10.5220/0010106401760183
In Proceedings of the 12th International Joint Conference on Computational Intelligence (IJCCI 2020), pages 176-183
ISBN: 978-989-758-475-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of air robot path planning, and then it is applied to
image restoration and parameter optimization (Duan
and Wang, 2016; Duan and Xu, 2020). These proves
that PIO algorithm has great application potential and
good applicability. However, PIO algorithm is often
used to deal with continuous problems, and the
mining of discrete problems is not deep enough. By
deeply understanding the mechanism of PSO
algorithm, Ye(Ye et al, 2017) adopted the crossover
and replacement operations of genetic algorithm
(GA) to update the speed and position of particles,
and solves the problem of task allocation. Inspired by
him, this paper adopts the same form to update
pigeons’ state information, and realizes the discrete
processing of PIO algorithm. On the other hand, at
present, a single algorithm can no longer meet the
needs of various problems, so it has become a general
trend to merge the advantages of multiple algorithms
to make up for the shortcomings of a single algorithm.
In view of the advantage of SA algorithm which can
keep the poor solution with a certain probability and
jump out of the local extremum, this paper integrates
SA in DPIO, which not only avoids the premature
convergence of the algorithm, but also effectively
shortens the optimization time of the algorithm.
After task allocation, if a certain UAV cannot
perform the task under special circumstances, the
Contract Net Algorithm (CNA) is used for task
scheduling. CNA is one of the distributed task
allocation algorithms, which has better scalability and
robustness. It is a kind of negotiation and
coordination mechanism, which simulates the
economic behaviour of "tender-bid-win" mechanism
to schedule tasks (Qiao et al., 2016). At present, the
research of CNA has a broad basis. Chen (Chen and
Qiao, 2016) adopted the CNA to study the real-time
scheduling of the manufacturing system. Experiments
show that the method can effectively reduce the
impact of disturbance factors such as equipment
failure on the system operation. Li (Li and Zhang.,
2017) combines the task load rate index and token
ring network in the CNA, which solves the task
allocation problem of multi autonomous underwater
vehicles and reduces the irrationality of task
allocation. Because of the good real-time
performance of CNA, this algorithm is adopted to
solve the task scheduling problem.
The rest of this paper is arranged as follows: In
section 2, the task allocation model is introduced; In
section 3, the DPIO-SA algorithm is proposed to
solve the task allocation problem; In section 4, CNA
is adopted to solve the task scheduling problem; In
section 5, the experimental results and simulation are
listed; In section 6, conclusion.
There are two innovations in this paper. Firstly,
the exchange and cross operations are used to update
the state information of pigeons and realize the
discretization of PIO algorithm. Secondly, Adding
SA algorithm to DPIO algorithm makes it easier to
jump out of local extremum.
2 TASK ALLOCATION MODEL
For the convenience of analysis, the variables in this
paper are defined as shown in Table 1:
Table 1: Related variables in task allocation model.
Paramete
r
Meaning
U
Number of UAVs
_task nums
Number of tasks
(
,
x
ui
p
,
,
y
ui
p
)
Initial position of the
th
i
UAV
(
,
x
tj
p
,
,
y
tj
p
)
Initial position of the
th
j
task
L
i
l
Lower limit of UAVs quantity
required for
th
i
task
H
i
l
Upper limit of UAVs quantity
required for
th
i
task
,ti
l
Number of UAVs performing
th
i
task actuall
y
()
i
att uav
Attack capability of
th
i
UAV
()
i
def uav
Defensive capability of
th
i
UAV
()
j
att task
Attack capability of
th
j
task
()
j
def task
Defensive capability of
th
j
task
()
i
val uav
Importance of
th
i
UAV
()
j
val task
Importance of
th
j
task
max
f
uel
Maximum fuel that a single UAV
can carr
y
.
,ui
f
uel
Fuel consumption per unit
distance
1234
,,,
ωωωω
Weights of related indexes
2.1 Constraints
Using the coordinate information of the UAVs and
tasks, the distance of
th
i
UAV and
th
j
task is
calculated.
,,,,,
()()
xx yy
ij ui tj ui tj
dpppp=−+−
(1)
The relationship between the fuel consumption
and distance can be expressed by:
Discrete Pigeon Inspired Simulated Annealing Algorithm and Contract Net Algorithm based on Multi-objective Optimization for Task
Allocation of UAV Formation
177

,,iuiij
f
uel fuel d=⋅
(2)
When performing the task, we consider the UAV
to be at a constant speed, so
,ui
f
uel
is set as a constant.
Then the fuel constraint can be expressed by:
maxi
f
uel fuel≤
(3)
When assigning tasks to UAVs, the number of
UAVs required for each task is different, and they
need to be kept within a range. If the number is not in
this range, it may affect the interaction and
communication of UAVs. The number constraint of
UAV required for each task can be expressed by:
,
L
H
itii
ll l≤≤
(4)
Transforming this constraint into penalty can be
expressed as:
_
,,
1
_
,,
1
0 others
task nums
LL
iti i ti
i
task nums
HH
iti i ti
i
ll l l
pe l l l l
=
=
−>
=−<
(5)
At the same time, each task requires multi UAVs
to perform together, and a single UAV can only
perform one task. It can be expressed as:
_
,
1
1, 1, 2, .
task nums
ij
j
allo i U
=
==
(6)
2.2 Performance Indicators
The loss index of the UAV is related to the defensive
ability of UAV and the attack ability of task.
Similarly, the damage index of the task is related to
the attack ability of UAV and the defensive ability of
task, which can be expressed as:
,
()/()
ij j i
los att task def uav=
(7)
,
()/( )
ij i j
dam att uav def task=
(8)
The loss of each UAV can be expressed as the
product of loss index of the UAV and the importance
of the UAV.
_
,,
11
()
task nums
U
ij ij i
ji
utlos allo los val uav
==
=
(9)
The cost of fuel consumption can be expressed as
the sum of fuel consumed by each UAV after running
to the designated task location.
1
U
i
i
utfuel fuel
=
=
(10)
The gain of executing tasks is defined as the
product of the damage index of the task and the
importance of the task.
_
,,
11
()
task nums
U
ij ij j
ji
utgain allo dam val task
==
=
(11)
The gain, loss, fuel consumption and penalty are
integrated in the evaluation function as the total
fitness. Then the evaluation function is combined
with the constraints to solve the following problem:
12
34
_
,
1
max
max
. . 1, 1, 2, ,
task nums
ij
j
i
J w utgain w utlos
w utfuel w pe
s
t allo i U
fuel fuel
=
=⋅ −⋅
−⋅ −⋅
==
≤
(12)
3 DPIO-SA ALGORITHM
PIO is generally used to solve the continuous
problem, while the task allocation problem is a
discrete problem, so the form of solution needs to be
rewritten. In this paper, multi-dimensional integer
vector coding is adopted to represent solutions. In the
result of DPIO, the vector dimension represents the
UAV number, and the vector element represents the
task number to be executed. For example, if the
solution is 1-3-3-2-1, which means the number of
UAV executing task 1 is 1,5; the number of UAV
executing task 2 is 4; the number of UAV executing
task 3 is 2,3.
Due to the complexity of the constraints and the
large amount of calculation, the DPIO is proposed for
solving.
When pigeons are far away from their destination,
they will fly in a general direction according to the
magnetic field and the sun. Reflected in the early
stage of the algorithm, it is expressed as learning from
the global optimal individual. Through in-depth
analysis and research on the mechanism of the PIO
algorithm, it is found that the essence of the compass
operator is to use the individual's own information
and the optimal individual to update the position, so
we can reconstruct its update formula.
() () ()
{
}
21
1,
iig
X
t c Fw FXt pt+=⊗ ⊗
(13)
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
178
where,
()
i
Xt
represents the positions of pigeon
group in the
th
i
iteration.
()
g
pt
represents the
global extremum.
w
represents the inertia weight.
c
represents learning coefficient.
()
()
1 i
F
Xt
is the
function of the influence of pigeon's own velocity on
its position.
() ()
()
2 ig
F
Xt pt,
is the function that
pigeons learn from global extremum.
The position update formula consists two parts.
Let
()
i
t
ψ
be the temporary variable:
(i)
() ()
()
()
()
()
1
11
1
,
=
,
ii
i
i
twFXt
F
Xt r w
X
trw
ψ
=⊗
<
≥
(14)
This is the inertia part of the individual, which
indicates the reference of the individual to its own
speed. Among them,
()
i
t
ψ
represents the pigeon's
speed. During speed updating, a random number
1
r
in the interval [0, 1] is generated by
()rand
. If
1
rw<
, genes exchange will be perform. Two random
numbers
a
and
b
are generated, and then the genes
at
a
and
b
positions in the solution are exchanged,
which means, the task to be performed by the
th
a
UAV is exchanged with that to be performed by the
th
b
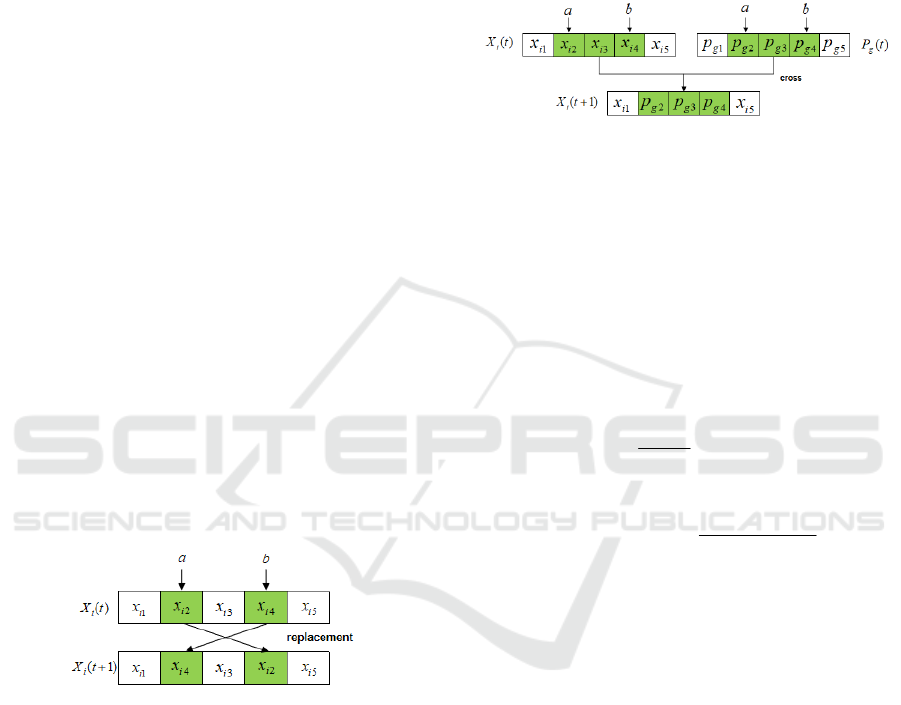
UAV. As shown in Figure 1.
Figure 1: Schematic diagram of exchange operation.
(ii)
( ) () ()
()
() ()
()
()
2
22
2
1,
,,
=
,
iig
ig
i
X
tcFtpt
F
tpt r c
trc
ψ
ψ
ψ
+=⊗
<
≥
(15)
This is the learning part of the individual, which
indicates that the pigeon adjusts its position
according to the global extremum
()
g
p
t
. During
learning, a random number
2
r
in the interval [0, 1] is
generated by
()rand
. If
2
rc<
, genes cross will be
performed. Two random numbers
a
and
b
are
generated, and then the genes between
a
and
b
positions in the solution are exchanged by global
extremum
()
g
pt
, which means, the tasks performed
by the
th
a
to the
th
b
UAVs are all replaced by the tasks
performed by the
th
a
to the
th
b
UAVs in the global
extremum
()
g
p
t
. As shown in Figure 2.
Figure 2: Schematic diagram of cross operation.
When the pigeon group is close to the destination,
it will be closer to the population that is familiar with
the landmark information. After each iteration, the
number of pigeon population will be halved, and the
first half with better adaptability will be selected as
the current population. The center of the remaining
pigeon group is obtained by averaging the genes in
the remaining pigeon group, and the center is used as
the reference direction to update the position of each
pigeon. The operation is as follows:
()
()
()
()
() ()
(1)
1
2
1
2
1
1
(1)
11
p
p
p
Nt
i
i
c
p
ic
Nt
Nt
Xt
Xt round
Nt
Xt d FX t
+
=
+=
+
+=
+
+=⊗ +
(16)
When the position is updated, a random number
2
r
is generated by
()rand
. If
2
rd<
, two random
numbers
a
and
b
are generated. Then the genes
between
a
and
b
of the current individual are replaced
by the genes of the reference center.
However, DPIO is easy to fall into local
extremum. In order to solve this problem, SA is used
to improve it. The main idea of SA is to judge whether
to accept new solution according to the Metropolis
criterion. The metropolis guidelines are as follows:
()
1 0
y=
exp / 0T
Δ>
ΔΔ≤
,
,
(17)
where
() ()
f
itness new fitness oldΔ= −
.
The specific method is: after each iteration of
compass operator and landmark operator, the fitness
Discrete Pigeon Inspired Simulated Annealing Algorithm and Contract Net Algorithm based on Multi-objective Optimization for Task
Allocation of UAV Formation
179
of the new solution and the current solution is
compared. If the fitness of new solution is higher, the
new solution is accepted; Else, a random value
[
]
3
0,1r ∈
is generated. If
3
ry<
, the new solution is
accepted, otherwise the solution is not updated.
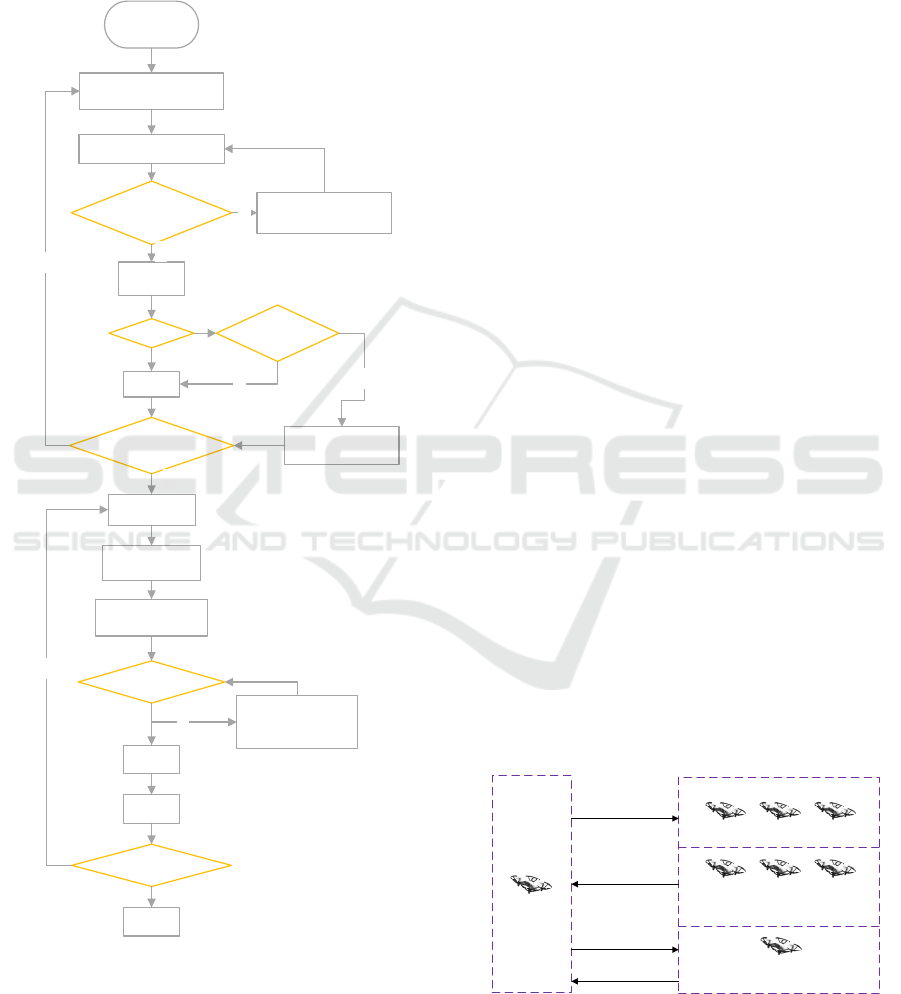
The flow chart of DPIO-SA is shown in Figure 3.
Population
initialization
Get the global
optimal particle
Update
Output
result
Genes exchange
Cross
End of compass
operators?
Sort fitness
Half the
population
Find center of
the group
Satisfy
constraints?
N
Y
Replace genes
that do not meet
constraints
Satisfy
constraints?
Cross
Update
Keep original
particle
End of landmark
operator?
N
Y
N
Y
N
Keep the original
particle
N
Y
Y
exp( / )
nn
kT<Δ
0?Δ>
Y
N
Figure 3: Flow chart of DPIO-SA algorithm.
4 CONTRACT NET ALGORITHM
In the CNA, UAVs are divided into the tenderer
UAV, the potential bidder UAV, the bidder UAV and
the winner UAV. The tenderer UAV is the owner of
the task; The potential bidder UAV is the UAV that
have a communication relationship with the tenderer
UAV and the bidder UAVs are the UAVs that meet
the task constraints. The winner UAV is the UAV that
finally signs the contract with the tenderer UAV after
bidding.
When a UAV is unable to perform the current task
due to special circumstances, the CNA is used for task
scheduling. First, whether the task performed by the
UAV meet the UAV quantity constraint is judged. If
it is not satisfied, i.e.
,
L
ti i
ll<
, then the UAV will issue
tasks as the tenderer UAV. Then, the tenderer UAV
issues tasks to the UAVs that have communication
relationship with it. These UAVs are defined as
potential bidder UAVs.
Next, in the bidding stage, the potential bidder
UAV first judges whether there are redundant UAVs
in the currently executed task. If not, the UAV cannot
perform other tasks; if there are, then, it is judged
whether the UAV meets the fuel constraint from its
position to the task assembly point of the bidder's
UAV, if so, it will be marked as the bidder UAV. And
the
g
ain
,
utlos
and
utfuel
will be used as
performance indicators to calculate the overall
capacity and send it to the tenderer UAV.
21 2 3
=J w utgain w utlos w utfuel⋅−⋅−⋅
(18)
Finally, the tenderer UAV selects the bidder UAV
with the largest overall capacity according to the
returned information and sends winning information
to it. After receiving the information, the winner
UAV changes its task attributes and executes the task
assigned to the tenderer UAV. The specific
negotiation process is shown in Figure 4:
…
…
Potential Contractor UAVs
Contractor UAVs
Winner UAV
UAV 1
UAV 2 UAV 3
Tenderer UAV
send out the
bidding information
Send the fitness
message
Send winning
information
Send the contract
Figure 4: Task negotiation process based on CAN.
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
180
5 EXPERIMENT SIMULATIONS
In order to verify the effectiveness of the algorithm,
the simulation experiments are carried out under the
Windows 10 operating system based on Matlab2019
(a) environment.
5.1 DPIO-SA Experiment Results
After running the program, we can get the value range
of gain is [6.1235, 6.7347], the value range of loss is
[29.6690, 36.1274], and the value range of fuel
consumption is [480.5009,721.3119]. In order to
ensure that the length of the three values are the same,
let
1
10w =
,
2
1w =
,
3
0.025w =
. In order to ensure that
the task allocation results meet the quantity
constraints,
4
w
must be large enough, so
4
=1000w
.
The number of the number of simulated pigeons is
100n =
. The number of compass iterations is
1
100Dt =
The number of landmark iterations is
2
50Dt =
.The initial temperature of SA is
8T =
,
the temperature attenuation factor is
0.8k =
, The
number of SA iterations is
=30L
. The UAVs are
randomly distributed in the site of
100 100mm×
.The
number of UAVs used in the experiment is 24, and
each task target is at the quintile of the site. Due to the
excessive number of UAVs, their performance
parameters are too large, which will not be listed here.
Task performance parameters are shown in Table 2.
Table 2: Task parameters.
Task1 Task 2 Task 3 Task 4 Task 5
x 25 50 25 75 75
y
25 50 75 25 75
A 54 72 46 54 54
D 77 68 42 77 77
V 0.45 0.15 0.25 0.45 0.45
L
i
l
4 4 4 4 4
H
i
l
8 9 9 8 8
where (x, y) is the position of tasks, A and D are the
attack and defensive ability of the tasks, respectively.
V is the value of the tasks.
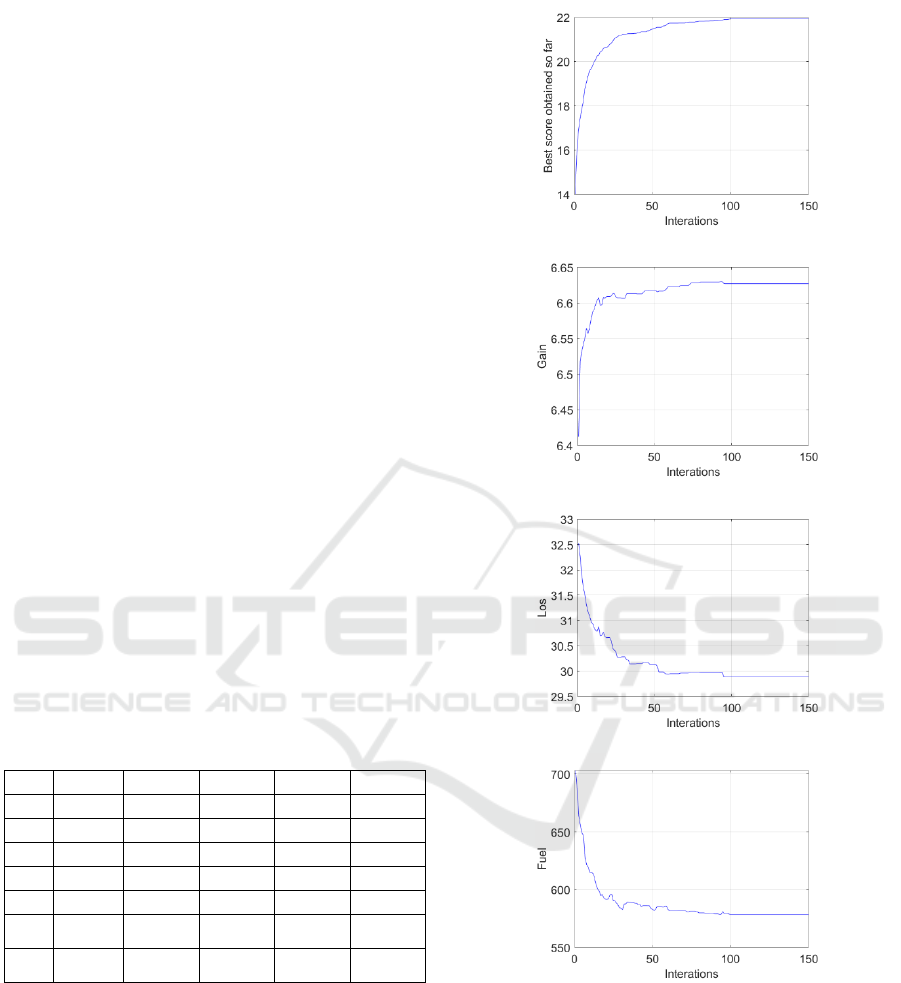
Run the program 30 times to find the average
value of each parameter. The iteration results of each
indicator of task allocation are shown in the figure 12:
(a)
Total fitness
(b)
Gain
(c)
Loss
(d)
Fuel consumption
Figure 5: Results of task allocation.
where Fig 5(a) shows the total fitness, Fig 5(b) shows
the gain. Fig 5(c) shows the loss, Fig 5(d) shows the
fuel consumption. It can be seen from the Figure 5
that the algorithm converges after 103 iterations in
average, and we can see that while ensuring the total
fitness is maximized, the gain is maximized, the loss
and the fuel consumption are minimized.
Discrete Pigeon Inspired Simulated Annealing Algorithm and Contract Net Algorithm based on Multi-objective Optimization for Task
Allocation of UAV Formation
181
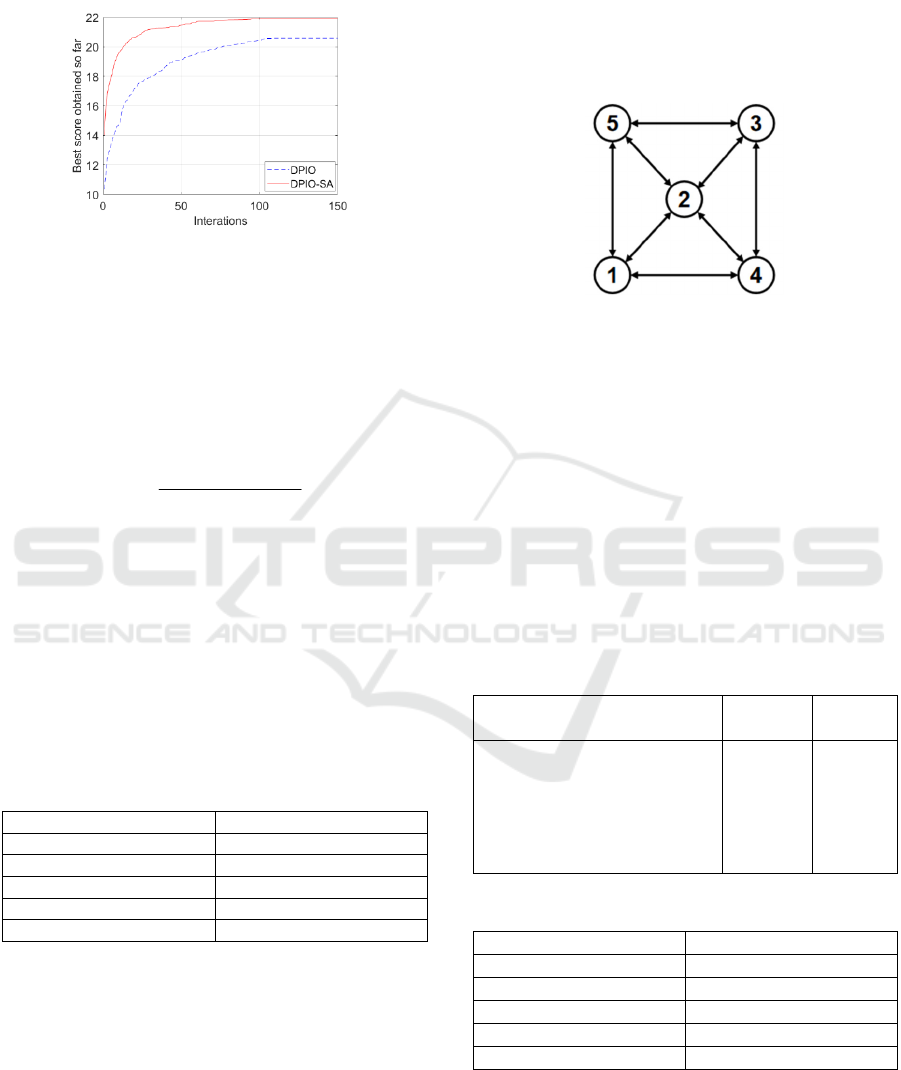
The algorithms based on DPIO and DPIO-SA are
simulated. Take the average values of the algorithms
after 30 runs. The comparison is shown in Figure 6.
Figure 6: Comparison of DPIO and DPIO-SA.
As can be seen from the Figure 6, the average
convergence value of DPIO-SA is 21.9444, and
DPIO-SA is 20.5672. In order to better compare the
two algorithms, a baseline is set, here we set it as the
minimum fitness during the execution of the
algorithm. Therefore, the following formula can be
used for comparison:
fitness
DPIO
fitness base
η
Δ
=
−
(19)
where
fitness DPIO SA DPIO
fitness fitness
−
Δ= −
,
10.3712base =
. It can be concluded that the
convergence value of DPIO-SA is 13.5% higher than
that of DPIO. At the same time, in 30 runs, the
number of times DPIO-SA reaches the global
extremum is 15. And DPIO is 2. Both mean DPIO-
SA is easier to jump out of local extremum.
The optimal solution of the task allocation is
shown in the Table 3:
Table 3: Results of the task allocation.
Task numbe
r
UAV numbe
r
1 1-6-7-22
2 5-14-16-21
3 8-9-10-17-18
4 2-3-11-12-20
5 4-13-15-19-23-24
5.2 CNA Experiment Results
First, a UAV is randomly selected as the tenderer
UAV release the task. Assume that the tenderer UAV
is UAV6. From the task allocation result, UAV6
performs task1. The lower limit of the number of
UAVs required for task1 is
1
4
L
l =
, so when UAV 6
fails to perform task1, the task cannot be completed.
At this time, the CNA is used for task scheduling.
Firstly, UAV6 issues task to all UAVs in the
network. Because of the large number of UAVs, the
UAV communication diagram is represented by task
network. When there is a connection between two
tasks, it means that all UAVs between the two tasks can
communicate with each other. The task networking
diagram of this paper is shown in Figure 7:
Figure 7: The task network diagram.
It can be seen from Figure 7 that tasks associated
with task 1 include task 3, task 4, and task 5.
According to the task allocation result, all UAVs
performing task 3, task 4, and task 5 have redundant
UAVs, so all UAVs performing these three tasks will
be considered as potential bidder UAVs. According
to whether the fuel constraints between UAVs and
task1 are met, the potential bidder UAVs can be
considered as bidder UAVs. The fitness is calculated
according to the contract, as shown in Table 5. After
bidding, the winner UAV is UAV 17. The types of
UAVs in the CNA are shown in Table 4.
Table 4: Types of UAVs in the contract network.
Potential Bidde
r
UAVs
Bidde
r
UAVs
Winne
r
UAV
UAV2, UAV3, UAV4,
UAV8, UAV9, UAV10,
UAV11, UAV12, UAV13,
UAV15, UAV17, UAV18,
UAV19, UAV20, UAV23,
UAV24
UAV2,
UAV11,
UAV13,
UAV17,
UAV20
UAV17
Table 5: Bidder UAVs and corresponding fitness.
UAV numbe
r
Fitness
UAV 2 20.9041
UAV 11 21.1804
UAV 17 21.4688
UAV 13 21.093
UAV 20 21.3611
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
182

6 CONCLUSION
In this paper, aiming at the problem of multi-UAV
task allocation, a mathematical model for multi-
objective optimization under complex constraints is
established, and DPIO-SA algorithm is proposed to
solve it. Firstly, the speed and position information of
the pigeon group are changed according to the
exchange and cross operations, which solves the
difficulty of the PIO algorithm to deal with the
discrete problem. Then, after each iteration, the SA
algorithm is used to judge whether to accept the new
solution or not, which makes the algorithm easier to
jump out of the local extremum. The experimental
results show that when the overall performance index
reaches the optimum, the profit value reaches the
maximum and the loss and fuel consumption reach
the minimum. After run the algorithms 30 times, it
can be seen clearly that DPIO-SA has better
optimization ability than DPIO. Aiming at the task
scheduling problem, this paper proposes the CNA to
get the optimal task scheduling scheme through four
stages: First, the tenderer UAV sends out bid
information to potential bidder UAV. Then, the
potential bidder UAV is screened out as the bidder
UAV according to the contract requirements, and the
fitness information is sent to the tenderer UAV. Then,
the tenderer UAV selects the appropriate bidder UAV
as the winner UAV and sends the winning
information. Finally, the tenderer UAV and the
winner UAV sign the contract.
ACKNOWLEDGEMENTS
This research was supported in part by the National
Natural Science Foundation of China under grant No.
51979275, by the National Key Research and
Development Program of China under grant Nos.
2017YFD0701003 and 2018YFD0700603, by the
Jilin Province Key Research and Development Plan
Project under grant No. 20180201036SF, by the Open
Fund of Synergistic Innovation Center of Jiangsu
Modern Agricultural Equipment and Technology,
Jiangsu University, under grant No. 4091600015, by
the Open Research Fund of State Key Laboratory of
Information Engineering in Surveying, Mapping and
Remote Sensing, Wuhan University, under grant No.
19R06, by the Open Research Project of the State Key
Laboratory of Industrial Control Technology,
Zhejiang University, China, under grant No.
ICT20021, and by the Chinese Universities Scientific
Fund under grant No. 2019TC108 and 10710301.
REFERENCES
Chen, X., Qiao, Y. Z., 2016. Summary of unmanned aerial
vehicle task allocation. Journal of Shenyang Aerospace
University. 33(06):1-7.
Duan., H. B, Qiao, P. X., 2014. Pigeon-inspired
optimization: a new swarm intelligence optimizer for
air robot path planning. International Journal of
Intelligent Computing & Cybernetics. 7(1): 24-37.
Duan, H. B., Wang, X. H, 2016. Echo State Networks with
Orthogonal Pigeon-Inspired Optimization for Image
Restoration. Neural Networks and Learning Systems,
IEEE Transactions on. 27(11): 2413-2425.
Duan, H. B., Xu, X. B, et al., 2020. ADRC controller design
for UAV based on variable weighted mutant pigeon
inspired optimization. Acta Aeronautica et
Astronautica Sinica. 40(1):323490.
Huang, T. X., Tang D. B., Zhang, H. T., 2017. Research on
Realtime and Dynamic Scheduling Mechanism of
Intelligent Manufacturing System Based on Agent.
Machine Building Automation. 46(06):164-168.
Li, J., Zhang, K. Y., 2017. Heterogeneous Multi-AUV
Cooperative Task Allocation Based on Improved
Contract Net Algorithm. Journal of Unmanned
Undersea Systems. 25(5): 418-423.
Qi, X. G., Li, B., Fan, Y. S., et al. 2019. A survey of mission
planning on UAV system based on multi-constraints.
CAAI transactions on intelligent systems. 12(2):1-14.
Qiao, T. Z., Guo, X. P., Li, Y. W., 2016. Cooperative task
assignment simulation of Multi-UAVs in dynamic
environments. Journal of System Simulation.
28(09):2126-2132.
Ratanavilisagul, C., 2017. Modified Ant Colony
optimization with Pheromone Mutation for Travelling
Salesman Problem. 2017 14th International
Conference on Electrical Engineering/Electronics,
Computer, Telecommunications and Information
Technology 1(02), 411-414.
Ye, W., Zhu, A. H., Ouyang, Z. H., et al., 2010. Multi-
UCAV Cooperation Mission Assignment Based on
Hybrid Discrete Particle Swarm Optimization
Algorithm. Acta Armamentarii. 31(03):331-336.
Zainal, N., Zain, A, M., Sharif S., 2015. Overview of
Artificial Fish Swarm Algorithm and its Applications in
Industrial Problems. Applied Mechanics and Materials
815:253-257.
Zong, Q., Wang, D. D., et al., 2017. Research status and
development of multi UAV coordinated formation
flight control. Journal of Harbin Institute of
Technology. 49(03):1-14.
Discrete Pigeon Inspired Simulated Annealing Algorithm and Contract Net Algorithm based on Multi-objective Optimization for Task
Allocation of UAV Formation
183
