
XCSF for Automatic Test Case Prioritization
Lukas Rosenbauer
1
, Anthony Stein
2
, David P
¨
atzel
3
and J
¨
org H
¨
ahner
3
1
BSH Home Appliances, Im Gewerbepark B35, Regensburg, Germany
2
Artificial Intelligence in Agricultural Engineering, University of Hohenheim, Garbenstr. 9, Stuttgart, Germany
3
Organic Computing Group, University of Augsburg, Eichleitnerstr. 30, Augsburg, Germany
joerg.haehner@informatik.uni-augsburg.de
Keywords:
Testing, Learning Classifier Systems, Evolutionary Machine Learning, Reinforcement Learning.
Abstract:
Testing is a crucial part in the development of a new product. Due to the change from manual testing to
automated testing, companies can rely on a higher number of tests. There are certain cases such as smoke
tests where the execution of all tests is not feasible and a smaller test suite of critical test cases is necessary.
This prioritization problem has just gotten into the focus of reinforcement learning. A neural network and an
XCS classifier system have been applied to this task. Another evolutionary machine learning approach is the
XCSF which produces, unlike XCS, continuous outputs. In this work we show that XCSF is superior to both
the neural network and XCS for this problem.
1 INTRODUCTION
Evolutionary computation has lead to several ad-
vances in testing. Rodrigues et al. (2018) examined
how a genetic algorithm (GA) can be used to gener-
ate test data. Nature inspired techniques have been ex-
ploited by Haga and Suehiro (2012) to automatically
generate test cases. Another application is to mutate
certain parts of the software to be tested in order to
detect how effective tests are (Jia and Harman, 2008).
The former has become its own field called mutation
testing. Further GAs have been used to decide how
resources should be allocated in order to ensure how
reliability can be guaranteed (Dai et al., 2003).
Our use case is located in continuous integration
(CI) that is a practice in software development to fre-
quently integrate the work of each engineer. Thus
big forks that are hard to merge can be avoided and
software quality can be ensured. CI is made possible
by using an automation tool such as Jenkins (Smart,
2011). Jenkins can be used to checkout source code,
build it, test it, and deploy it. These steps are sum-
marized as pipelines (see Figure 1). One execution of
such a pipeline is called CI cycle.
checkout
source code
build
software
test
software
deploy
software
Figure 1: Example of a CI pipeline.
In this paper we concentrate solely on the testing
stage during which tests from any testing level may
run such as unit tests or even system tests. These
can vary in terms of their duration and ability to de-
tect failures. In some situations such as smoke test-
ing it is not feasible to run all tests as there is not
enough time (Dustin et al., 1999). Thus crucial tests
must be selected to form a test suite whose execu-
tion time does not exceed a given time budget. The
test suite should be adapted from cycle to cycle, re-
acting to code changes that influence the tests’ out-
comes. The desired test suite should be optimal in
terms of its ability to find errors: Tests that can be
expected to pass should be skipped whereas tests that
would detect errors should be executed. Thus the tests
are to be ranked according to their ability to find er-
rors. The prioritization and time budget induce the
test suite. The task of selecting such a prioritization
and test suite optimally is referred to as adaptive test
case selection problem (ATCS) (Spieker et al., 2017).
Spieker et al. (2017) and Rosenbauer et al. (2020)
exploit the fact that the CI infrastructure saves the
testing history (duration of tests, executions, test re-
sults). This information is used to construct a pri-
oritization of the test cases. During each CI cycle
the available test cases are parsed and ranked by re-
inforcement learning (RL) agents. An agent either
gets a penalty or a reward, based on the outcome
of the execution and the determined prioritization.
Rosenbauer, L., Stein, A., Pätzel, D. and Hähner, J.
XCSF for Automatic Test Case Prioritization.
DOI: 10.5220/0010105700490058
In Proceedings of the 12th International Joint Conference on Computational Intelligence (IJCCI 2020), pages 49-58
ISBN: 978-989-758-475-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
49

Spieker et al. (2017) employ a neural network-based
agent while Rosenbauer et al. (2020) utilize one based
on the XCS classifier system (XCS) (Wilson, 1995).
XCS belongs to the family of learning classi-
fier systems (LCS). LCSs are a framework of evo-
lutionary rule-based machine learning methods (Ur-
banowicz and Browne, 2017). Research for LCS goes
in multiple directions: mathematical examination as
documented by P
¨
atzel et al. (2019), reduction of run-
time (Lanzi and Loiacono, 2010) or how the structure
of LCSs can be adapted to improve learning perfor-
mance (Stein et al., 2020). One such adaptation of
XCS is called XCSF. It differs from XCS as it has a
continuous output instead of a discrete one (Wilson,
2002). This is achieved by introducing polynomial
models as predictors to the classifiers of XCSF.
During this work we apply XCSF to the ATCS
problem. In order to do so, we examine three different
data sets. This has lead to the following contributions:
• We show that the piece-wise function approxima-
tion principle of XCSF is an advantage over XCS.
In all our experiments XCSF has an equal or bet-
ter performance.
• Rosenbauer et al. (2020) conducted a preliminary
study about the suitability of LCSs for ATCS. For
this they considered the three data sets and reward
functions that were used to benchmark the neu-
ral network of Spieker et al. (2017). The network
was in some cases superior to XCS. Our XCSF
approach is superior to the network in all but one
cases. If another reward function is used, then
XCSF is equal in terms of performance on this
data set.
We continue this paper with a brief discussion of
related work in Section 2. Afterwards we describe
ATCS in general and its interpretation as a RL prob-
lem. Further we describe the policy that we want to
use that is based on the approximation of a state-value
function (Section 3). In Section 4 we describe XCS
since XCSF is a mere extension of it. This is followed
by a description of how XCSF evolved from XCS and
how we adapted it for ATCS (Section 5). We bench-
mark our XCSF-based agent on three industrial data
sets against the neural network of Spieker et al. (2017)
and the XCS of Rosenbauer et al. (2020) in Section
6. We discuss possible future work in Section 7. We
close this work with a conclusion (Section 8).
2 RELATED WORK
Several approaches outside RL already exist to prior-
itize test cases. Di Nardo et al. (2015); Mirarab et al.
(2012) prioritize based on the coverage of the test
cases that requires a more detailed knowledge about
the underlying software. Gligoric et al. (2015) anal-
yse code dependencies to form a regression test suite.
Kwon et al. (2014) apply information retrieval tech-
niques to the source code and unit tests in order to
form a test suite. An entire survey about test case pri-
oritization was conducted by Marijan et al. (2013).
There are already several pure history-based ap-
proaches to form a prioritization (Park et al., 2008;
Jung-Min Kim and Porter, 2002; Noguchi et al.,
2015). The first RL-based approach that solely relies
on historical data has been developed by Spieker et al.
(2017). Spieker et al. (2017) performed a competitive
study where they successfully compared their neural
network with several non-RL methods. The RL ap-
proach ensures easy integration into existing develop-
ment systems that enabled companies such as Netflix
to use it
1
. Rosenbauer et al. (2020) conducted a pre-
liminary study for the RL setting using XCS.
Epitropakis et al. (2015) developed a method to
find a prioritization technique that intends to fulfill
several criteria. There are also several approaches
that are specialized for a specific form of testing such
as automotive (Haghighatkhah, 2020), user interfaces
(Nguyen et al., 2019) or production systems (Land
et al., 2019).
From a machine learning point of view our work
is deeply linked to LCS research. Applications range
from traffic control (Tomforde et al., 2008), over dis-
tributed camera control (Stein et al., 2017) to manu-
facturing (Heider et al., 2020a). We are also not the
first to apply XCSF to a real-world problem. It can
be used to control robots (Stalph et al., 2009) or for
image classification (Lee et al., 2012). It is also worth
mentioning that XCSF is not the only LCS that pro-
vides a continuous output, for example SupRB’s ac-
tion space is also continuous (Heider et al., 2020b).
However, we are first to our knowledge to apply
XCSF to a testing use case.
3 PROBLEM DESCRIPTION
In order to be consistent with the previous literature,
we follow the notation of Rosenbauer et al. (2020).
Let T be a test case. It has an estimated duration
of d(T ) and during CI cycle i there is a total execution
time of C available. During each CI cycle, each test
gets assigned a rank rk
i
(T ) which serves as a priority.
Ranks are not unique (it is possible for two tests to get
1
A corresponding article can be found here: Netflix
techblog
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
50

assigned the same rank). After this prioritization step,
a schedule is created that takes into account the time
budget available: The available tests are sorted de-
scendingly by their ranks, then, tests are taken repeat-
edly from the start of the resulting list until the sum
of the already selected tests’ estimated durations just
not yet exceeds the time budget. If there is not enough
time to schedule all tests of one rank, then tests of this
rank are selected uniformly at random until the termi-
nation criterion is met. Let l
i
(T ) be the index of a test
to bes executed T in the schedule. The selected tests
make up the test suite TS
i
which is executed as part of
CI cycle i. Let TS
f
i
be the test cases in TS
i
that failed
and TS
t,f
i
be the set of failed tests if all available tests
had been executed. The number of errors the test suite
found relative to TS
t,f
i
is then:
p
i
=
TS
f
i
TS
t,f
i
(1)
A widespread metric for evaluating the quality of a
test case prioritization is the normalized average per-
centage of faults detected (NAPFD) (Qu et al., 2007):
NAPFD(TS
i
) = p
i
−
∑
T ∈TS
f
i
l
i
(T )
|TS
f
i
| · |TS
i
|
+
p
i
2 · |TS
i
|
(2)
For NAPFD, high values are desired as small test
suites that detect many failures result in such high
values—especially if the failed tests were ranked
high. On the other hand, either failed tests with a
low rank or an increased number of high priority
tests which passed without error decrease the NAPFD
value. Thus, NAPFD measures the quality of both the
prioritization as well as the test suite.
Using the definition of NAPFD we are now able
to define the adaptive test case selection problem
(ATCS):
max NAPFD(TS
i
)
subject to
∑
T ∈TS
i
d(T) ≤ C
TS
i
⊆ T
i
(3)
where T
i
denotes the set of available test during cycle
i. Thus the goal is the choice of TS
i
based on T
i
.
Similar to Spieker et al. (2017) and Rosenbauer
et al. (2020), we intend to solve ATCS using RL
which leads to the workflow described in Figure
2. The following paragraphs describe several possi-
ble reward functions as well as the state and action
spaces.
A reasonable thought is to try using the NAPFD
metric as a reward function for an agent. However, in
practice this would force us to always execute all tests
(p
i
is needed for its computation) which we explicitly
want to avoid. Thus Spieker et al. (2017) came up
with three alternative reward functions. The first is
the failure count reward
r
fc
i
(T ) = |TS
f
i
| (4)
which does not distinguish between individual tests
as all receive the same reward. A more fine-grained
approach is the test failure reward,
r
tcf
i
(T ) =
(
1 − v
i
(T ) T ∈ TS
i
0 otherwise,
(5)
where v
i
(T ) is the binary verdict of T during cycle
i with 0 indicating ‘test failed’ and 1 indicating ei-
ther of ‘test passed’ or ‘test not executed due to the
time restriction’. The advantage of r
tcf
i
over r
fc
i
is that
it rewards tests individually based on their outcome.
However, it does not take the test’s rank into account
which has an impact on NAPFD. Thus Spieker et al.
(2017) came up with the time ranked reward
r
trk
i
(T ) = |TS
f
i
| − v
i
(T ) ·
∑
t
k
∈TS
f
i
,
rk(T )<rk(t
k
)
1 (6)
which still gives all failed test cases the same reward
but does distinguish the non-failed tests. These are
punished by the number of failed tests with a lower
rank. For example, a passed test that was correctly
ranked with a low priority will get a high reward and
a passed test with a high rank leads to a penalty. In
general, we denote the reward received at time t as
r(t).
The problem’s state space is defined as follows:
S = [0,C] × {0, 1}
k
× [0, 1] (7)
The state (a test case) contains the approximated du-
ration (a real number between 0 and C), the testing
history (a binary vector of length k), and the time of
the last execution relative to the entire testing history
(a real number between 0 and 1). The hyperparam-
eter k indicates how many previous outcomes of the
test case are given to the agent. If there are not yet
k test results available, the missing entries are filled
with zeroes. States are vectors of dimension k+2; we
denote the state at time t by s(t).
The action space for both our XCSF-based solu-
tion as well as the network of Spieker et al. (2017) is
R whereas the XCS-based agent of Rosenbauer et al.
(2020) used an action space of {0, 1,. . ., 45}. We
write the action performed at time t as a(t).
It is worth mentioning that the RL interpretation
of ATCS slightly differs from the most common tem-
poral difference learning (TD) setting as, here, first
all tests are ranked and only after the execution of the
tests of T
i
are rewards distributed. In TD, sequences
XCSF for Automatic Test Case Prioritization
51
test cases
agent
prioritized
test cases
selection &
scheduling
execution of
scheduled
tests
evaluation
rewards
Figure 2: Workflow for solving ATCS using RL.
of states, actions and rewards are usually observed un-
til a terminal state is observed:
s(1), a(1), r(1), s(2), a(2), r(2), . . . (8)
For ATCS, the sequence instead has the form
s(1), a(1), s(2), a(2). . . , s(n), a(n), r(1), r(2) . . . r(n)
(9)
with episodes corresponding to CI cycles (the termi-
nal state being the end of the cycle) which means
that the agent’s actions do not determine the length
of episodes. Also, the selection of states encountered
during an episode is fixed as well as the test cases to
be ranked are known. However, it is worth mention-
ing that the environment may change from cycle to
cycle as new bugs may be introduced to the software
or existing ones may be fixed (leading to additional
failed or succeeding tests, respectively).
A method often used for solving RL problems is
to approximate the state-action-value function (often
called Q-function) which assigns a measure of value
to each state-action pair (s, a) (e. g. the expected re-
turn when action a is performed in s and a certain
policy followed thereafter). Instead, our system ap-
proximates a state-value function V (·) for the follow-
ing policy π:
π(s) =
ˆ
V(s) (10)
where
ˆ
V(·) is the approximation of V (·). This pol-
icy follows a simple heuristic: A test case’s priority
should correspond to the value that can be achieved
or in other words if a test case (i. e. a state) has a high
value then it should have a high priority.
ˆ
V(·) esti-
mates the reward that will be received if that policy is
applied. Thus our RL approach can also be seen as a
form of regression.
4 XCS CLASSIFIER SYSTEM
A learning classifier system (LCS) roughly consists
of a population of rules, a learning mechanism for
them and an evolutionary heuristic to optimize their
localization in input space (usually a GA). The rules
are called classifiers and we denote one such rule by
cl. Each classifier proposes an action cl.a to be ex-
ecuted if the conditions it specifies are met by the
state s(t). Conditions can vary in their form depend-
ing on the problem. For example, a condition could
be a Boolean predicate that a value is in an interval.
Further, each classifier tracks certain quality measures
that can be used to decide which rules of the popula-
tion should be applied.
A widespread LCS is the XCS classifier system
(XCS) which was introduced by Wilson (1995). A
classifier in XCS tracks how often it has been applied.
This is coined the classifier’s experience. Further pa-
rameters include the classifier’s predicted payoff cl.p
which estimates the return to be expected if the rule
is applied, an error estimate for that prediction cl.ε
and a niche-relative payoff prediction accuracy called
fitness cl. f .
Whenever XCS classifier system encounters a new
state s(t), it searches its population for classifiers
whose conditions are met (this is called matching).
If not enough classifiers are found then new ones are
created probabilistically whose conditions match s(t).
This process is called covering. The found and newly
created classifiers make up the match set M
t
. Based
on the match set XCS computes a quality measure
called system prediction, the fitness-weighted sum of
predicted payoffs, for each action in available in the
match set:
∑
cl∈M
t
,cl.a=a
cl.p · cl. f
∑
cl∈M
t
,cl.a=a
cl. f
(11)
These values make up the prediction array PA
t
which
is used as a base for decision-making. XCS usually
either chooses the action at random to explore the en-
vironment or according to the highest system predic-
tion value. After it has decided for an action it selects
all classifiers of M
t
that propose the chosen action and
summarizes them in the action set A
t
. After the exe-
cution of the chosen action, XCS receives a reward
which is used to calculate the update target P:
P = r(t) + γ · max(PA
t+1
) (12)
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
52

where γ is the usual reinforcement learning discount-
ing factor. It is used to update the classifiers of
the previous action set A
t−1
such that each classifier
learns to model the expected return received when its
action is executed for states that match its conditions.
XCS additionally employs a genetic algorithm to
optimize the conditions of the classifiers available. Its
task is to find an optimal partition of the classifiers
for the problem surface by adapting their localization.
The heuristic creates new classifiers based on existing
ones of the population by applying crossover and mu-
tation operators on their conditions. The GA is used
periodically (e. g. after every tenth state encountered).
The population of XCS has a fixed capacity. After
each execution of the GA and the matching process,
its size is checked. If the population has too many ele-
ments then XCS deletes classifiers at random but pro-
portional to their quality. We call this deletion mech-
anism pruning.
We describe the basic workflow of XCS in Al-
gorithm 1. The function choose action employs a ε-
greedy policy to select the next action (Butz and Wil-
son, 2001). We keep the description of XCS at this
abstract level but recommend to read Urbanowicz and
Browne (2017) where LCSs are described in detail.
Algorithm 1: XCS workflow based on Butz and
Wilson (2001).
input : s(t), r(t − 1)
1 M
t
= matching(population, s(t))
2 PA
t
= prediction array(M
t
)
3 a = choose action(PA
t
)
4 A
t
= get action set(M
t
, a)
5 execute a, observe r(t)
6 P = r(t − 1) + γ max(PA
t
)
7 // if non-empty
8 update A
t−1
by P
9 A
t−1
= A
t
10 if GA should run then
11 run GA on A
t
12 prune population
Rosenbauer et al. (2020) adapted XCS to the prob-
lem as it originally follows the usual TD learning
scheme based on the sequence of states, actions and
rewards given in Equation 8 and not the sequence
given in Equation 9. In order to adapt XCS to the
problem they introduced a batch update rule. Instead
of using the maximum system prediction of the suc-
ceeding state, they use the average maximum system
prediction of the states of the succeeding CI cycle to
compute P:
P = r(t) + γ ·
∑
j∈e
i+1
max(PA
j
)
|T
i+1
|
(13)
where e
i+1
denotes the time steps of the cycle i + 1.
Further, the classifiers are always updated at the end
of a cycle and not between two states. In our later
experiments we simply call this variant XCS.
Additionally, Rosenbauer et al. (2020) examined
whether a experience replay version of XCS can im-
prove results for ATCS. However, this proved to be
detrimental in most cases which is why we do not in-
clude that version in our later experiments.
5 FROM XCS TO XCSF
XCS as proposed by Wilson (1995) produces a dis-
crete output (the actions). Some problems, however,
have a more continuous nature. Thus Wilson (2002)
adapted XCS to also provide a real-valued output
which resulted in the XCSF classifier system, a gen-
eral function approximator. In our use case we use
XCSF to approximate V (·) as already mentioned in
Section 3 which enables us to use continuous actions.
In contrast to standard XCS, a classifier in XCSF
does not have a scalar prediction. Instead its predic-
tion is modelled as a function that approximates the
expected payoff. Here we model the classifier’s pre-
diction function as follows:
cl. p(s) = w
0
+
k+2
∑
i=1
w
i
· s
i
(14)
where s is an element of the state space and w
i
repre-
sent real-valued weights. Initially the weights are set
randomly. The weights are updated using a gradient-
descent-based method called modified delta rule (Wil-
son, 2002):
∆w
i
=
η
k ˜sk
2
(r − cl.p(s))˜s
i
(15)
The old estimation of w
i
is simply updated by adding
∆w
i
. Here η denotes the learning rate which controls
how strongly a new experience can influence the cur-
rent estimator. The vector ˜s is the same as the state
vector s but with an additional of 1 for fitting the in-
tercept:
˜s = (1, s
1
, s
2
, ..., s
k+2
)
T
(16)
Further, k ˜sk is the euclidean norm of ˜s and r is the
reward that corresponds to the state s. Thus we do
not use P of Equation 12 as an update target, but the
actual reward.
XCSF classifiers only maintain a dummy action
(in order to stick to the original workflow of XCS).
Hence XCSF computes only one system prediction as
follows:
∑
cl∈M
t
cl.p(s(t)) · cl. f
∑
cl∈M
t
cl. f
(17)
XCSF for Automatic Test Case Prioritization
53

which is used as estimation for the function to be ap-
proximated (in our case V (s(t))). We directly use the
estimation as action as we employ the policy of Equa-
tion 10.
For XCSF, the match set is equal to the action set.
Hence all matching classifiers are updated whenever
a reward is received. Further M
t
is updated using r(t).
In our experiments we employ a batch update
mode as we only receive rewards at the end of a CI
cycle. Thus during the prioritization of tests we solely
choose ranks and save the action sets that will be up-
dated as described in Algorithm 2. At the end of the
cycle we update the collected action sets, run the GA
and prune the population (see Algorithm 3).
It is worth mentioning that we further differ from
Wilson (2002) as the states s also contain binary vari-
ables instead of exclusively real numbers. We can still
fit our linear models cl.p(·) since gradient-descent
based methods such as the modified delta rule only
require continuous weights and not continuous states
(as the weights are optimized) (Aggarwal, 2020).
Algorithm 2: Action selection of XCSF.
input : state s
output: action a
1 M
t
= matching(population, s)
2 a =
∑
cl∈M
t
cl.p(s)·cl. f
∑
cl∈M
t
cl. f
3 A
t
= M
t
4 cycle action sets.append(A
t
)
5 return a
Algorithm 3: XCSF batch update learning.
input: rewards of CI cycle
1 for j = 1 to length(rewards) do
2 update cycle action sets[j] by rewards[j]
3 if GA should run then
4 run GA on cycle action sets[j]
5 end
6 cycle action sets = {}
7 prune population
6 EVALUATION
In our experiments we compare our batch update
XCSF with the XCS variant of Rosenbauer et al.
(2020) and the artificial neural network approach of
Spieker et al. (2017). We reuse the three data sets of
Spieker et al. (2017). The first two are from a Scan-
dinavian robot company and called ABB paint control
and ABB IOF/ROL. Additionally the Google shared
data set of test suite results (GSDTSR) is considered.
2 3 4 5 6 7 8
History Length
40
60
80
100
% of best result
XCS
XCSF
Network
Figure 3: Evaluation of the history length’s influence on
performance. The y-axis displays the average NAPFD val-
ues of the methods in relation to the best average NAPFD
achieved.
Table 1: Examined data sets.
paint IOF/ROL GSDTSR
control
CI cycles 312 320 336
test cases 114 2,086 5,555
verdicts 25,594 30,319 1,260,617
failed 19.36% 28.43% 0.25%
Table 1 gives a brief overview about the structure of
these data sets. All three data sets vary in terms of
their test cases, verdicts, and amount of failed tests.
Thus we can examine the three methods on a broader
scope.
Table 2: P-Values for paired Student t-tests (rounded to the
fifth decimal). Values below 0.05 are marked bold. The null
hypothesis is that XCS is superior to XCSF.
Paint Control IOF/ROL GSDTSR
r
fc
0.00523 0.25042 0.0002
r
tcf
0.30446 0.32404 0.00091
r
trk
0.00192 0.14235 0.00001
Table 3: P-Values for paired Student t-tests (rounded to the
fifth decimal). Values below 0.05 are marked bold. The null
hypothesis is that the neural network is superior to XCSF.
Paint Control IOF/ROL GSDTSR
r
fc
0.0 0.01473 0.0
r
tcf
0.99999 0.00015 0.0
r
trk
0.0 0.00078 0.0
For the XCS-based agent and the neural network
we can rely on the original implementation. Both
were also benchmarked on the same data sets that
we consider. We adopted the original hyperparame-
ters proposed by Spieker et al. (2017) and Rosenbauer
et al. (2020) for each respective agent, respectively.
This way, we ensure a fair comparison with our ap-
proach.
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
54
0.00
0.25
0.50
0.75
1.00
NAPFD
ABB Paint Control
Network
XCS
XCSF
ABB IOF/ROL
(a) Failure Count Reward
GSDTSR
0.00
0.25
0.50
0.75
1.00
NAPFD
(b) Test Case Failure Reward
60 120 180 240 300
CI Cycle
0.00
0.25
0.50
0.75
1.00
NAPFD
60 120 180 240 300
CI Cycle
(c) Time-ranked Reward
0 60 120 180 240 300
CI Cycle
Figure 4: Comparison of XCSF with XCS and the neural network.
To our knowledge there is no XCSF library for
states that both have binary and real valued compo-
nents. Hence we had to implement our own XCSF
which we did in Python 3
2
. We modelled the condi-
tions for the real values as intervals and for the binary
parts of the states we follow the original XCS and use
ternary conditions (Wilson, 1995). For the GA we use
a roulette wheel selection-based on the classifier’s fit-
ness. For the crossover of the ternary conditions we
apply a one-point crossover and for the intervals and
weights of cl.p(·) an arithmetic one. For the muta-
tion of the ternary conditions we follow Butz and Wil-
son (2001) and for the interval-based conditions and
weights of cl.p(·) we apply a random mutation (i. e.
choosing an entirely random interval). We don’t per-
form any form of subsumption.
We set the learning rate η to 0.1. We draw the ini-
tial weights of cl.p(·) during covering and mutation
uniform at random from [−10,10]. For the remaining
hyperparameters we follow the notation of Butz and
Wilson (2001). The population capacity N is 2000. α
and β are set to 0.15, ν is 5, θ
GA
is 25, µ is 0.025. The
initial error ε
I
and initial fitness f
I
of the classifiers is
set to 0. θ
del
is 20, θ
sub
is 20, χ is 0.75, p
exp
is 0.2 and
2
source code: https://github.com/LagLukas/xcsf atcs
ε
0
is 0.01. During covering we set a binary condition
to # with a probability of 0.33.
We perform thirty i.i.d. runs for every experiment
and display the averaged results. We can simulate the
real use case as we have the results of all test cases for
every CI cycle. Thus we can use the reward functions
of Section 3 whilst being able to evaluate the perfor-
mance of the methods in terms of NAPFD.
In our first experiment we evaluate the influence
of the history length k on the performance. We ex-
amine the lengths k = 2, 3, .., 8. For all methods we
use the time ranked reward function. The results can
be seen in Figure 3. The x-axis shows the values for
k and the y-axis shows the average NAPFD values of
the methods relative to the best. XCSF clearly ex-
ceeds the two RL agents for this combination of re-
ward function and data set. We verified this visual
observation with a series of one-sided paired Student-
t tests which were significant. We further verified the
necessary condition of normal distributed data with
Shapiro-Wilk tests. For these tests we used a signifi-
cance level of 0.05.
Furthermore we could observe that a higher value
of k is beneficial for XCSF. Thus we will use a his-
tory length of 8 in the upcoming experiments. For the
other agents the history length does not seem to affect
XCSF for Automatic Test Case Prioritization
55

their performance too much. However, this is only
one out of nine possible combinations of reward func-
tion and data set. Hence we consider now all three
data sets and reward functions in order to examine the
performance of XCSF on a wider scope.
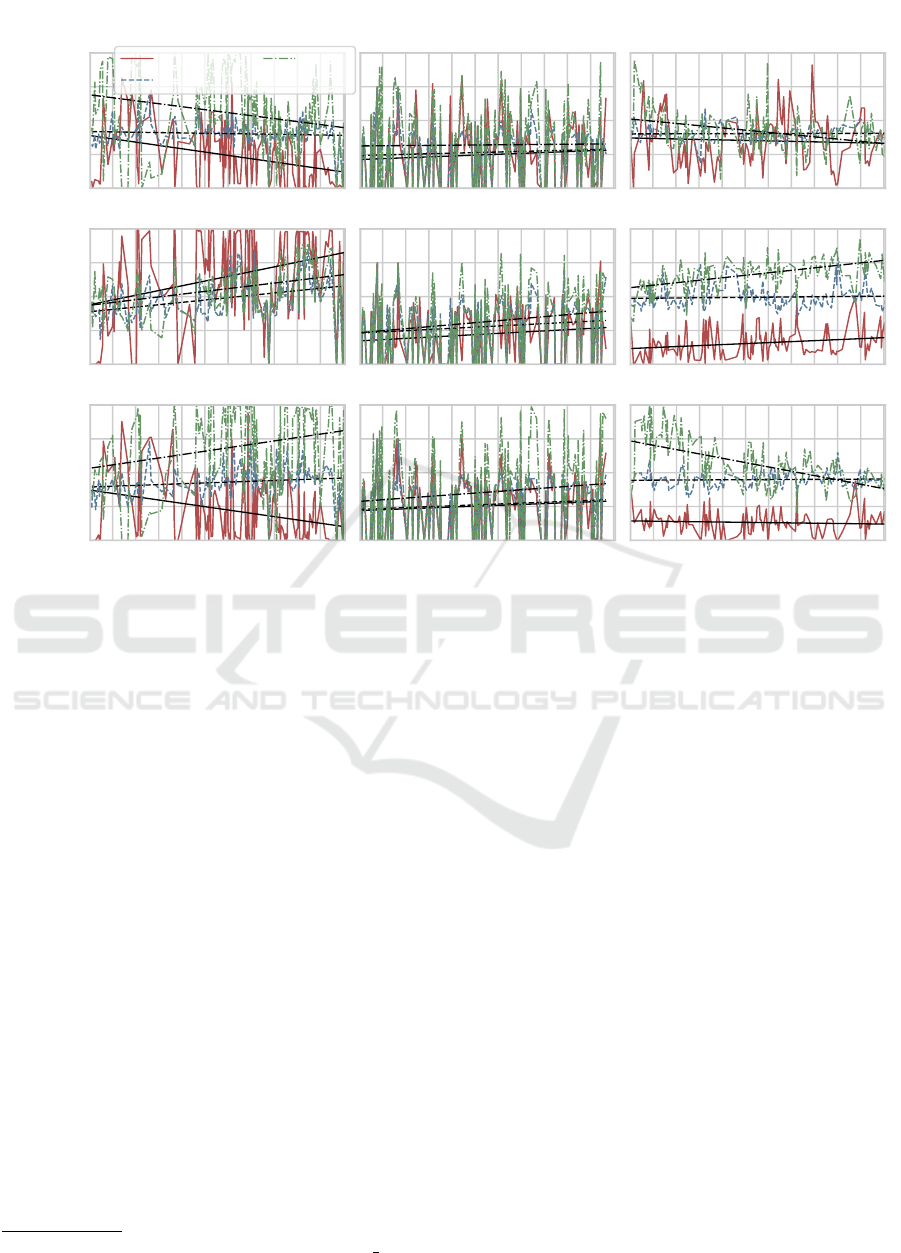
The results are displayed in Figure 4. Each col-
umn contains the results for one data set and each row
represents the experimental outcome for one reward
function. Each plot contains a trendline for every ex-
amined agent next to the averaged results.
We provide additional statistical tests in Table 2
and 3 as we deem a purely visual evaluation as insuffi-
cient. Especially as trendlines can easily be disturbed
by statistical outliers. The tables contain p-values of
paired Student-t tests where we marked p-values be-
low 0.05 as significant. The necessary condition of
normal distributed data was confirmed by Shapiro-
Wilk tests (using a significance level of 0.05).
On the paint control data set (column 1) we can
see that XCSF is superior to XCS (in terms of the
trendline) for all reward functions but the perfor-
mance, if the failure count reward is used, seems
to decline over time. Statistical tests can confirm
XCSF’s superiority for the failure count reward and
the time ranked reward. For the test case failure re-
ward the p-value is not significant and thus we per-
formed an additional t-test to test the nullhypothesis
that XCSF is superior to XCS. The latter test was also
not significant and thus we deem both systems equiv-
alent for this combination of data set and reward func-
tion. However, we can observe the best performance
for XCSF for the time ranked reward and there it
clearly exceeds XCS regardless of the reward function
in terms of NAPFD. XCSF is also able to outperform
the neural network in two out of three cases. Visu-
ally we cannot determine if XCSF combined with the
time ranked reward or the network combined with the
test case failure reward is better suited for this data set
or vice versa. Additional paired Student-t tests could
also not reveal which approach is superior. Hence we
deem both methods as equivalent for this problem.
For the IOF/ROL data (column 2) the trendlines
indicate that XCSF is superior to XCS but statistical
tests cannot confirm this observation (see Table 2).
We additionally tested the nullhypothses that XCSF
is superior to XCS and we could also not reject these.
Hence we deem XCS and XCSF equivalent on this
data set. On the other hand the statistical evaluation
shows that XCSF is superior to the neural network.
However, all three approaches have difficulties learn-
ing a good policy on this data set as the NAPFD re-
sults are generally worse than on the paint control data
set.
Column 3 displays the results for the GSDTSR
data set. For the failure count reward and the time
ranked reward the performance of XCSF seems to de-
cline over time and finally falls behind XCS. Due to
the high NAPFD values for most CI cycles the statis-
tical tests state that XCSF is better. However, visu-
ally the best approach for this data set is XCSF com-
bined with the test case failure reward. This com-
bination does not only outperform the XCS but also
the neural network for all three reward functions (in
terms of NAPFD). Furthermore it is also the only set-
ting where we can observe a positive slope for the
trendline. Spieker et al. (2017) and Rosenbauer et al.
(2020) deemed this as rather unlikely to achieve as the
data set contains very few failed tests.
We also observed that the structure of the data set
should also be considered for the choice of the reward
function for XCSF (Hamid and Braun, 2019). If the
data set contains very few failed tests then the time
ranked reward function proofs detrimental (see GS-
DTSR) but if it contains a certain amount of failures
then it seems to be a good choice (see ABB data sets).
7 FUTURE WORK
We further want to boost the results of XCSF by using
interpolation (Stein et al., 2018; Stein et al., 2016).
The application of interpolation to certain parts of
XCSF such as the GA can improve learning effi-
ciency.
Another new direction in machine learning is to
generate new experiences from previous ones (also by
applying interpolation) and use them for training. von
Pilchau et al. (2020) showed in a preliminary study
that this proofs useful for artificial neural networks.
The same could be the case for LCSs such as XCSF.
Further, we only applied linear functions for the
classifiers. Lanzi et al. (2005) showed that polyno-
mial functions of higher order such as cubic ones can
also be beneficial for XCSF.
Furthermore we think that the performance of
XCSF can be improved by using more information
such as changelogs, git diffs or additional test meta-
data.
8 CONCLUSION
During this work we evaluated the test case priori-
tization problem coined adaptive test case selection
problem (ATCS). Recently it has been interpreted as
reinforcement learning problem and two agents are
known in literature; an XCS-based one (Rosenbauer
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
56

et al., 2020) and an approach using an artificial neural
network-based (Spieker et al., 2017).
We used a XCSF-based agent and employed a
simple heuristic: a test case of high value should have
a high priority. Hence we used XCSF to approximate
a state-value function V (·) and interpreted the approx-
imated values as actions.
We benchmarked our agent on three different data
sets using three reward functions. In our comparison,
XCSF was in 8 out of 9 cases superior to the neural
network. For a single combination of reward func-
tion and data set XCSF was inferior. However, if the
best combinations of reward functions and agent are
considered on the data set then both approaches are
equal.
Our experiments showed that the continuous out-
put leads to a performance boost compared to XCS as
XCSF was in all nine cases considered either superior
or had an equivalent performance. Thus we recom-
mend to use XCSF for ATCS.
REFERENCES
Aggarwal, C. (2020). Linear Algebra and Optimization for
Machine Learning: A Textbook.
Butz, M. V. and Wilson, S. W. (2001). ”An Algorithmic
Description of XCS”. In Luca Lanzi, P., Stolzmann,
W., and Wilson, S. W., editors, Advances in Learn-
ing Classifier Systems, pages 253–272, Berlin, Hei-
delberg. Springer Berlin Heidelberg.
Dai, Y., Xie, M., Poh, K., and Yang, B. (2003). ”Optimal
testing-resource allocation with genetic algorithm for
modular software systems”. Journal of Systems and
Software, 66(1):47 – 55.
Di Nardo, D., Alshahwan, N., Briand, L., and Labiche, Y.
(2015). Coverage-based regression test case selection,
minimization and prioritization: a case study on an
industrial system. Software Testing, Verification and
Reliability, 25(4):371–396.
Dustin, E., Rashka, J., and Paul, J. (1999). Automated Soft-
ware Testing: Introduction, Management, and Perfor-
mance. Addison-Wesley Longman Publishing Co.,
Inc., USA.
Epitropakis, M. G., Yoo, S., Harman, M., and Burke, E. K.
(2015). Empirical evaluation of pareto efficient multi-
objective regression test case prioritisation. In ISSTA
2015.
Gligoric, M., Eloussi, L., and Marinov, D. (2015). Ekstazi:
Lightweight Test Selection. In 2015 IEEE/ACM 37th
IEEE International Conference on Software Engineer-
ing, volume 2, pages 713–716.
Haga, H. and Suehiro, A. (2012). Automatic test case gen-
eration based on genetic algorithm and mutation anal-
ysis. In 2012 IEEE International Conference on Con-
trol System, Computing and Engineering, pages 119–
123.
Haghighatkhah, A. (2020). Test case prioritization using
build history and test distances: an approach for im-
proving automotive regression testing in continuous
integration environments.
Hamid, O. H. and Braun, J. (2019). Reinforcement Learn-
ing and Attractor Neural Network Models of Associa-
tive Learning, pages 327–349. Springer International
Publishing, Cham.
Heider, M., P
¨
atzel, D., and H
¨
ahner, J. (2020a). Towards
a Pittsburgh-Style LCS for Learning Manufacturing
Machinery Parametrizations. In Proceedings of the
2020 Genetic and Evolutionary Computation Confer-
ence Companion, GECCO ’20, page 127–128, New
York, NY, USA. Association for Computing Machin-
ery.
Heider, M., P
¨
atzel, D., and H
¨
ahner, J. (2020b). SupRB: A
Supervised Rule-based Learning System for Continu-
ous Problems.
Jia, Y. and Harman, M. (2008). Constructing Subtle Faults
Using Higher Order Mutation Testing. In 2008 Eighth
IEEE International Working Conference on Source
Code Analysis and Manipulation, pages 249 – 258.
Jung-Min Kim and Porter, A. (2002). A history-based test
prioritization technique for regression testing in re-
source constrained environments. In Proceedings of
the 24th International Conference on Software Engi-
neering. ICSE 2002, pages 119–129.
Kwon, J., Ko, I., Rothermel, G., and Staats, M. (2014). Test
Case Prioritization Based on Information Retrieval
Concepts. In 2014 21st Asia-Pacific Software Engi-
neering Conference, volume 1, pages 19–26.
Land, K., Cha, S., and Vogel-Heuser, B. (2019). An
Approach to Efficient Test Scheduling for Auto-
mated Production Systems. 2019 IEEE 17th Interna-
tional Conference on Industrial Informatics (INDIN),
1:449–454.
Lanzi, P. L. and Loiacono, D. (2010). ”Speeding Up Match-
ing in Learning Classifier Systems Using CUDA”. In
Bacardit, J., Browne, W., Drugowitsch, J., Bernad
´
o-
Mansilla, E., and Butz, M. V., editors, Learning
Classifier Systems, pages 1–20, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Lanzi, P. L., Loiacono, D., Wilson, S. W., and Goldberg,
D. E. (2005). Extending xcsf beyond linear approxi-
mation. In Proceedings of the 7th Annual Conference
on Genetic and Evolutionary Computation, GECCO
’05, page 1827–1834, New York, NY, USA. Associa-
tion for Computing Machinery.
Lee, P., Teng, Y., and Hsiao, T.-C. (2012). XCSF for Predic-
tion on Emotion Induced by Image Based on Dimen-
sional Theory of Emotion. In Proceedings of the 14th
Annual Conference Companion on Genetic and Evo-
lutionary Computation, GECCO ’12, page 375–382,
New York, NY, USA. Association for Computing Ma-
chinery.
Marijan, D., Gotlieb, A., and Sen, S. (2013). Test Case Pri-
oritization for Continuous Regression Testing: An In-
dustrial Case Study. In 2013 IEEE International Con-
ference on Software Maintenance, pages 540–543.
Mirarab, S., Akhlaghi, S., and Tahvildari, L. (2012). Size-
Constrained Regression Test Case Selection Using
XCSF for Automatic Test Case Prioritization
57

Multicriteria Optimization. IEEE Transactions on
Software Engineering, 38(4):936–956.
Nguyen, A., Le, B., and Nguyen, V. (2019). Prioritizing
Automated User Interface Tests Using Reinforcement
Learning. In Proceedings of the Fifteenth Interna-
tional Conference on Predictive Models and Data An-
alytics in Software Engineering, PROMISE’19, page
56–65, New York, NY, USA. Association for Comput-
ing Machinery.
Noguchi, T., Washizaki, H., Fukazawa, Y., Sato, A., and
Ota, K. (2015). History-Based Test Case Prioritization
for Black Box Testing Using Ant Colony Optimiza-
tion. In 2015 IEEE 8th International Conference on
Software Testing, Verification and Validation (ICST),
pages 1–2.
Park, H., Ryu, H., and Baik, J. (2008). Historical Value-
Based Approach for Cost-Cognizant Test Case Prior-
itization to Improve the Effectiveness of Regression
Testing. In 2008 Second International Conference
on Secure System Integration and Reliability Improve-
ment, pages 39–46.
P
¨
atzel, D., Stein, A., and H
¨
ahner, J. (2019). A Survey
of Formal Theoretical Advances Regarding XCS. In
Proceedings of the Genetic and Evolutionary Com-
putation Conference Companion, GECCO ’19, pages
1295–1302, New York, NY, USA. ACM.
Qu, X., Cohen, M. B., and Woolf, K. M. (2007). Com-
binatorial Interaction Regression Testing: A Study of
Test Case Generation and Prioritization. In 2007 IEEE
International Conference on Software Maintenance,
pages 255–264.
Rodrigues, D. S., Delamaro, M. E., Corr
ˆ
ea, C. G., and
Nunes, F. L. S. (2018). Using Genetic Algorithms in
Test Data Generation: A Critical Systematic Mapping.
ACM Comput. Surv., 51(2).
Rosenbauer, L., Stein, A., Maier, R., P
¨
atzel, D., and H
¨
ahner,
J. (2020). XCS as a Reinforcement Learning Ap-
proach to Automatic Test Case Prioritization. In Pro-
ceedings of the Genetic and Evolutionary Computa-
tion Conference Companion, GECCO ’20.
Smart, J. F. (2011). Jenkins: The Definitive Guide. O’Reilly,
Beijing.
Spieker, H., Gotlieb, A., Marijan, D., and Mossige, M.
(2017). Reinforcement Learning for Automatic Test
Case Prioritization and Selection in Continuous Inte-
gration. In Proceedings of the 26th ACM SIGSOFT In-
ternational Symposium on Software Testing and Anal-
ysis, ISSTA 2017, page 12–22, New York, NY, USA.
Association for Computing Machinery.
Stalph, P. O., Butz, M. V., and Pedersen, G. K. M. (2009).
Controlling a Four Degree of Freedom Arm in 3D
Using the XCSF Learning Classifier System. In
Mertsching, B., Hund, M., and Aziz, Z., editors, KI
2009: Advances in Artificial Intelligence, pages 193–
200, Berlin, Heidelberg. Springer Berlin Heidelberg.
Stein, A., Eym
¨
uller, C., Rauh, D., Tomforde, S., and
H
¨
ahner, J. (2016). Interpolation-based classifier gen-
eration in XCSF. In 2016 IEEE Congress on Evolu-
tionary Computation (CEC), pages 3990–3998.
Stein, A., Maier, R., Rosenbauer, L., and H
¨
ahner, J. (2020).
XCS Classifier System with Experience Replay. In
Proceedings of the Genetic and Evolutionary Compu-
tation Conference Companion, GECCO ’20.
Stein, A., Menssen, S., and H
¨
ahner, J. (2018). What about
Interpolation? A Radial Basis Function Approach to
Classifier Prediction Modeling in XCSF. In Proceed-
ings of the Genetic and Evolutionary Computation
Conference, GECCO ’18, page 537–544, New York,
NY, USA. Association for Computing Machinery.
Stein, A., Rudolph, S., Tomforde, S., and H
¨
ahner, J. (2017).
Self-Learning Smart Cameras – Harnessing the Gen-
eralization Capability of XCS.
Tomforde, S., Prothmann, H., Rochner, F., Branke, J.,
H
¨
ahner, J., M
¨
uller-Schloer, C., and Schmeck, H.
(2008). Decentralised Progressive Signal Systems for
Organic Traffic Control. pages 413–422.
Urbanowicz, R. J. and Browne, W. N. (2017). Introduction
to Learning Classifier Systems. Springer Publishing
Company, Incorporated, 1st edition.
von Pilchau, W. P., Stein, A., and H
¨
ahner, J. (2020). Boot-
strapping a DQN Replay Memory with Synthetic Ex-
periences. ArXiv, abs/2002.01370.
Wilson, S. (2002). Classifiers that Approximate Functions.
Natural Computing, 1:1–2.
Wilson, S. W. (1995). Classifier Fitness Based on Accuracy.
Evolutionary Computation, 3(2):149–175.
ECTA 2020 - 12th International Conference on Evolutionary Computation Theory and Applications
58
