
PI Piecewise Continuous Observer Design for Sampled and Delayed
Linear Systems with Variable Sampling Time Period
Yu Li
1
, Haoping Wang
1, a, *
and Yang Tian
1
1
School of Automation, Nanjing University of Science & Technology, XiaoLingWei Street, Nanjing, China
a
Corresponding author: hp.wang@ njust.edu.cn
Keywords: Piecewise Continuous Systems, Output with Variable Sampling Time Period and Delay, PI Piecewise
Continuous Observer.
Abstract: In recent years, network control systems and visual servo systems have received a lot of attention, but due to
network delay and the low sampling rate of visual sensors, it has caused problems for control. In order to
reduce the effects of the sampling and delay, this paper deals with proportional integration piecewise
continuous observer (PI-PCO), which is based on the theory of a particular class of hybrid systems, called
linear piecewise continuous hybrid system (LPCHS). This proposed PI-PCO can estimate the continuous
and non-delay state by using the sampled and delayed measurements with variable sampling time period. To
show the proposed PI-PCO performance, some numerical simulations with compared results are
demonstrated.
1 INTRODUCTION
The networked vision servo control system (NVSS)
consists of a networked control system and a visual
servo system (VSS). Compared with the traditional
control systems, NVSSs have greater flexibility.
However, output measurements can only be obtained
at discrete sampling moments in NVSS, and the
network may introduce time delay, which will
degrade the performance of the system and cause
instability. To avoid these problems, many observer
design methods are proposed. The most famous one
is the Kalman-Filter: a Switching-Kalman-Filter is
developed in (Chroust, S. & Vincze, M., 2003); a
Fussy-Kalman-Filter is proposed in (Perez, C., 2007).
Besides, a continuous observer based on
constructing a Lyapunov-Krasovskii function is
designed in (Shen et al., 2016). A sampled-output
observer is designed by compensating the time-delay
and sampling with an output predictor (Kahelras, M.,
2016). What’s more, an equivalent system method is
considered in (Natori et al., 2008). The delay
generated in the network is equated with adding a
network disturbance in the original system to
convert a delay system into a network disturbance
system, then design a communication disturbance
observer (CDOB) for delay compensation. In recent
years, a hybrid system approach is developed: paper
(Zhang et al., 2016) designs a sampled data observer
for a class of upper triangular nonlinear systems
with sampling and delay measurements; the work
(Wang et al., 2015, 2016), which we study on,
proposed piecewise-continuous observer. It makes
possible to estimate the non-delayed continuous
state using sampled and delayed output.
The proportional integration observer (PIO) was
first introduced by Wojciechowski in
(Wojciechowski, 1978) for single-input single-
output systems. Compared with the Luenberger
observer, PIO adds an integral loop to the estimation
error feedback. The integral part in the feedback
provides freedom for the estimation in two aspects:
on the one hand, it improves the robustness of the
estimation (Shafai et al., 1996, 2015); on the other
hand, it serves as a state and disturbance observer
(Chang, 2006) to estimate the state and unknown
input simultaneously, and able to improve
robustness. Paper (Wu et al., 2018) proposed a
proportional integral extended state observer by
introducing an integral term to the linear extended
state observer. Paper (Vahedforough & Shafai, 2008)
extends the traditional proportional adaptive
observer to the proportional integral adaptive
observer. In paper (Son et al., 2015; Kim & Son,
2017), a double reduced PI observer was proposed.
A robust PI observer is proposed in paper (Kim et al.,
2016). In this paper, to improves the robustness of
402
Li, Y., Wang, H. and Tian, Y.
PI Piecewise Continuous Observer Design for Sampled and Delayed Linear Systems with Variable Sampling Time Period.
DOI: 10.5220/0008865304020407
In Proceedings of 5th International Conference on Vehicle, Mechanical and Electrical Engineering (ICVMEE 2019), pages 402-407
ISBN: 978-989-758-412-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

the estimation, the PIO design method in (Shafai, &
Saif, M., 2015) is adopted.
Thus based on our previous proposed PCO in
(Wang et al., 2015) and integration of the PIO theory
(Shafai, & Saif, M., 2015), a proportional integration
piecewise continuous observer (PI-PCO) is proposed
to estimate the continuous undelayed state with
unknown varing time delay and sampling period,
and the other side to improve its robusteness.
Compared with the proportional Luenberger
observer, the PI observer has a stronger ability to
suppress system state reconstruction errors, resulting
in more accurate estimation of performance. The
performance comparison of PCO and PI-PCO is
shown in the simulation results.
2 PROBLEM DESCRIPTION
In this paper, we consider the case where the NVSS
sampling period
i
T
equals to the time delay, whose
values are unknown and variables. Its corresponding
architecture is illustrated in Figure 1.
Figure 1. Networked vision servo system.
The system for disposal can be modelled as
( ) ( ) ( )
( ) ( )
i
x t Ax t Bu t
z t y t T
(1)
Where
represents variable sampling period
i
T
.
For simplification,
()zt
can be denoted as
1i
y
.
3 PI-PIECEWISE CONTINUOUS
OBSERVER DESIGN
In this section, a PI-PCO with five-step algorithm is
designed, which is based on the LPCHS (Koncar &
Vasseur, 2003; Wang et al., 2015, 2016), and its
corresponding structure is shown in Figure 2.
Figure 2. PI-PCO architecture.
3.1 PI-PCO Design
In this section, a PI-PCO with five-step algorithm is
designed. In order to suppress the measurement
noise and improve the robustness of the PCO, a PIO
(Shafai, &
Saif, M.,
2015) is used to combine with
the reduced order discrete Luenberger (RODL).
Firstly, use the LPCHS I of
,0,1,1,1
i
t
with
the inputs of
( ) 1
s
ut
and
( ) 0
s
vt
, the time
interval between two successive sampling instants is
integrated. Then, LPCHS II of
,0,0, ,
i n n
t I I
with
the inputs of
( ) 0
s
ut
and
( ) ( )
s
v t v t
is used as a
zero-order-holder to generate the variable sampling
interval and delay
i
T
.
Secondly, use the LPCHS III of
, , , ,
i n n
t A B I I
with the inputs of
( ) ( )
s
u t u t
and
( ) 0
s
vt
, then sampling the output by using a
ZOH with variable period
i
T
, one obtains
1
1
1
1
()
1
()
2
i
i
i
ii
i
i
i
i
t
t
t
t A t
t
t
t
t
m
M e Bu d
m
(2)
With
1
m
mR
and
2
nm
mR
.
Thirdly, a reduced-order dimensional PI observer
is designed.
In time piece
1
,
ii
tt
, the state of the system
can be calculated as:
1
1
1
1
2
i
i
i
i
t
t
i d i i
t
t
m
x A T x
m
. (3)
Assume
1
2
x
x
x
, and
1
l
xR
,
2
nl
xR
,
1
xy
,
2
xw
.
PI Piecewise Continuous Observer Design for Sampled and Delayed Linear Systems with Variable Sampling Time Period
403

11 12
21 22
i
ii
AT
di
ii
A T A T
A T e
A T A T
(4)
Where
11
ll
i
A T R
,
12
l n l
i
A T R
,
21
n l l
i
A T R
,
22
n l n l
i
A T R
are variable
constant matrices.
Substituting (5) into (3), one has
1
1
11 12 1
21 22 1
1
2
i
i
i
i
t
t
i i i i
t
i i i i
t
m
y A T A T y
w A T A T w
m
(5)
Then, one obtains
1
11 1 12 1
1
i
i
t
i i i i i t
y A T y A T w m
(6)
1
21 1 22 1
2
i
i
t
i i i i i t
w A T y A T w m
(7)
Let
1
11 1
1
i
i
t
i i i t
Z y A T y m
(8)
1
21 1
2
i
i
t
i i t
V A T y m
(9)
Substituting (6) and (7) into (8) and (9), we can
get the state space expression of the
nl
dimension subsystem whose state vector is
w
:
12 1ii
Z A T w
(10)
22 1i i i
w A T w V
(11)
In the formula,
V
is the subsystem's input vector,
Z
is the output vector,
22 i
AT
is the coefficient
matrix, and
12 i
AT
is the output matrix. Since the
original system is fully observable, the subsystem
must also be observable.
The reduced-order dimensional PI observer can
be defined as follows:
22 1 1
ˆ
ˆ ˆ
()
i i i p i
w A T w V K Z Z L
(12)
12 1
ˆ
ˆ
ii
Z A T w
(13)
1
ˆ
()
i i i
L L K Z Z
(14)
Where
i
L
is the vector representing the integral
of the estimation error of
Z
, and the matrices
p
K
and
i
K
are selected to ensure the stability of the
observer.
In the interval
1
,
ii
tt
, the state space expression
of the reduced-dimensional observer can be written
as follows:
11
1 1 1
1 1 1
( 2 1 )
ˆ
ii
ii
tt
i i i i i t p t i
i i p i
F G y m K m L
w K y
(15)
With
22 12i i p i
F A T K A T
(16)
21 11i i P i P i
G FK A T K A T
(17)
Fourthly, calculate the non-delayed but sampled
state
i
x
ˆ
with the following equation:
1
1
ˆ ˆ
i
i
t
i d i i t
x A T x M
(18)
Lastly, the continuous and non-delayed state
x
ˆ
can be obtained by using the LPCHS IV of
, , , ,
i n n
t A B I I
with the inputs of
( ) ( )
s
u t u t
and
ˆ
()
si
v t x
:
()
()
ˆ ˆ
( ) ( )
i
i
t
A t t
At
i
t
x t e x e Bu d
(19)
3.2 PI-Piecewise Continuous Observer
Stability Analysis
The stability analysis of the PI-PCO can be achieved
by the analysis of the state estimation error.
According to equation (19), the estimate error
ˆ
( ) ( ) ( )e t x t x t
can be formulated as:
()
ˆ
( ) ( )
i
A t t
ii
e t e x x
(20)
Denoting
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
404

,
,
0
ˆ
ˆ
yi
i i i
wi
ii
e
e x x
e
ww
(21)
The
,wi
e
is expressed as:
1
1
11
,
21 1 22 1
11 1 12 1
1 1 1
ˆ
()
2
( 1 )
( 2 1 )
i
i
i
i
ii
ii
w i i i i p i i
t
i i i i t
t
p i i i i t
tt
i i i i t p t i
e w w w K y
A T y A T w m
K A T y A T w m
F G y m K m L
(22)
From (22) and the second equation of (15), one
can get:
,
i i w i p i
w e K y
(23)
Thus:
-1 -1 , -1 -1
i i w i p i
w e K y
(24)
From equation (22), one gets:
, , 1 22 12 1
21 11 1 1
()
()
w i i w i i p i i i
i p i i p i i i
e Fe A T K A T F w
A T K A T F K G y L
(25)
According to (16) and (17), one can get:
, , 1 1
w i i w i i
e Fe L
(26)
According to the algorithm of the PI-PCO, the
p
K
is selected to make sure
i
F
is a stable matrix to
ensure that
ˆ
i
w
converges rapidly to
i
w
, and
1i
L
is
the integral term of the error of
-1i
w
. This guarantees
a rapid decay of
,wi
e
, which leads to a rapid decay of
i
e
. Therefore, the attenuation of the estimation error
()et
and the state stability of the PI-PCO are
guaranteed.
4 SIMULATION RESULTS
In this section, the performance of PI-PCO is
compared with PCO on a networked visual servo
mobile cart system introduced in (Wang et al., 2015).
The input signal is selected as
( ) sin4u t t
, and the
measurement is disturbed with an additional
measuring noise, which is a gaussian noise with a
covariance value 0.001 and zero mean.
Figure 3. Variable delayed period
i
T
and the signal
i
ts
.
Figure 4. Position estimation with measurement noise.
0 2 4 6 8 10
-1
-0.5
0
0.5
1
Time (s)
T
i
s(t)
0 2 4 6 8 10
-0.5
0
0.5
1
1.5
2
2.5
3
Time (s)
State estimation
x
1
(t)
x
1
x
1PCO
x
1PI-PCO
z
PI Piecewise Continuous Observer Design for Sampled and Delayed Linear Systems with Variable Sampling Time Period
405
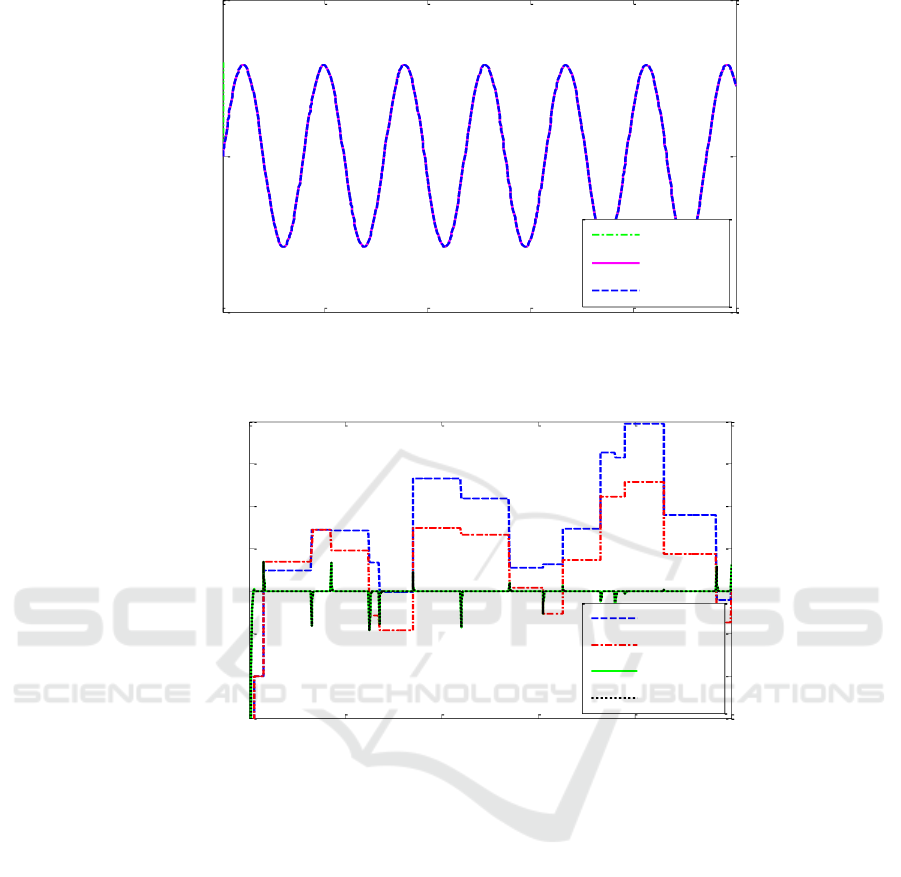
Figure 5. Speed estimation with measurement noise.
Figure 6. State estimation error of visual servo system.
The Figure 3 illustrates the variable delayed
period and the square signal. Figs. 4–6 show the
state estimations and the estimation errors both in
PI-PCO and PCO methods, the blue curve in the
Figure 4 represents the sampled and delayed output,
which is used in the observer for states estimation.
From the estimation errors depicted in the Figure 6,
it is clear to note that under the variable sampling
and delayed period, the proposed PI-PCO shows
better performances and ensures minor estimation
errors.
5 CONCLUSIONS
This paper dealt with the design of a new class of
state observers, called PI-PCOs, which is based on
the piecewise continuous systems and the concept of
PIO. It makes possible to estimate the continuous
and non-delayed state using sampled and delayed
measurements with variable sampling time period.
The proposed observer has a simple structure and
can be easily implemented. However, in the actual
system, the delay time and the sampling time period
are variable and not connected, which should be
studied in more depth.
ACKNOWLEDGEMENTS
This work is partially supported by the National
Natural Science Foundation of China (61304077)
and by the Natural Science Foundation of Jiangsu
Province (BK20130765).
0 2 4 6 8 10
-5
0
5
Time (s)
State estimation
x
2
(t)
x
2
x
2PCO
x
2PI-PCO
0 2 4 6 8 10
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Time (s)
Estimation errors
e(t)
e
1PCO
e
1PI-PCO
e
2PCO
e
2PI-PCO
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
406

REFERENCES
Chang, J. (2006) ‘Applying discrete-time proportional
integral observers for state and disturbance
estimations’, IEEE Transactions on Automatic Control,
51(5), pp. 814–818.
Chroust, S., and Vincze, M. (2003). ‘Improvement of the
prediction quality for visual servoing with a switching
kalman filter’, The International Journal of Robotics
Research, 22(10–11), pp. 905–922.
Kahelras, M., Ahmed-Ali, T., Théo Folin, et al. (2016).
‘Observer design for triangular nonlinear systems
using delayed sampled-output measurements’, IEEE
55th Conference on Decision and Control, pp. 1447–
1451.
Kim, I. H. and Son, Y. I. (2017) ‘Regulation of a DC/DC
Boost Converter under Parametric Uncertainty and
Input Voltage Variation Using Nested Reduced-Order
PI Observers’, IEEE Transactions on Industrial
Electronics, 64(1), pp. 552–562.
Kim, S. K. (2016) ‘Offset-free one-step ahead state
predictor for power electronic applications using
robust proportional-integral observer’, IEEE
Transactions on Industrial Electronics, 63(3), pp.
1763–1770.
Koncar, V. and Vasseur, C. (2003), ‘Control of linear
systems using piecewise continuous systems’, IEE
Proceedings - Control Theory and Applications,
150(6), pp. 565–576.
Natori, K., Oboe, R. and Ohnishi, K. (2008) ‘Stability
Analysis and Practical Design Procedure of Time
Delayed Control Systems with Communication
Disturbance Observer’, IEEE Transactions on
Industrial Informatics, 4(3), pp. 185–197.
Perez, C., García, N., Sabater, J. M., et al. (2007)
‘Improvement of the visual servoing task with a new
trajectory predictor the fuzzy kalman filter’,
Proceedings of the 4th International Conference on
Informatics in Control, Automation and Robotics, pp.
133-140.
Shafai, B., Beale, S., Niemann, H. H. and Stoustrup, J. L.
(1996) ‘LTR design of discrete-time proportional-
integral observers’, IEEE Transactions on Automatic
Control, 41(7), pp. 1056–1062.
Shafai, B., and Saif, M. (2015) ‘Proportional-integral
observer in robust control, fault detection, and
decentralized control of dynamic systems’, In Control
and Systems Engineering. Cham: Springer, pp. 13–43.
Shen, Y., Fu, S. and Wu, Z. (2016) ‘Observer design for
single-link robot arm systems based on sampled and
delayed output’, Proceedings of 8th International
Conference on Advanced Computational Intelligence,
pp. 45–48.
Son, Y. I., Kim, I. H., Choi, D. S. and Shim, H. (2015)
“Robust Cascade Control of Electric Motor Drives
Using Dual Reduced-Order PI Observer,” IEEE
Transactions on Industrial Electronics, 62(6), pp.
3672–3682.
Vahedforough, E. and Shafai, B. (2008) ‘Design of
Proportional Integral Adaptive Observers’,
Proceedings of the American Control Conference, pp.
3683–3688.
Wang, H. P., Tian, Y. and Christov, N. (2016),
‘Piecewise-continuous observers for linear systems
with sampled and delayed output’, International
Journal of Systems Science, 47(8), pp. 1804–1815.
Wang, H. P., Tian, Y. and Vasseur, C. (2015), ‘Piecewise
continuous hybrid systems based observer design for
linear systems with variable sampling periods and
delay output’, Signal Processing, 114, pp. 75–84.
Wojciechowski, B. (1978) Analysis and Synthesis of
Proportional-Integral Observers for Single-Input
Single-Output Time-Invariant Continuous Systems,
Gliwice, Poland.
Wu, J. F., Wang, H. L., Su, Z. K. and Shao, X. L. (2018)
‘UAV Broken-Line Path Following under Disturbance
Conditions’, Journal of Aerospace Engineering, 31(6).
Zhang, D., Shen, Y., Mei, J. and Guan, Z. (2016)
‘Sampled-data observer design for a class of nonlinear
systems with delayed measurements’, Proceedings of
Chinese Control and Decision Conference, pp. 2242–
2246.
PI Piecewise Continuous Observer Design for Sampled and Delayed Linear Systems with Variable Sampling Time Period
407
