
Finite-Time Synchronization for Neutral-Type Neural Networks with
Markovian Switching and Multi-Delays
Hui Shi
1, a
, Dongbing Tong
2, b
1
School of Electronic and Electrical Engineering, Shanghai University of Engineering Science, Shanghai 201620, China
2
School of Electronic and Electrical Engineering, Shanghai University of Engineering Science, Shanghai 201620, China
Keywords: Finite-time synchronization; Markovian switching; multi-delays; neutral-type neural networks (NTNNs);
adaptive control.
Abstract: In this brief, the problem of the finite-time synchronization is considered for neutral-type neural networks
(NTNNs) with the Markovian switching and multi-delays. Sufficient conditions are acquired for the finite-
time synchronization of NTNNs by Lyapunov stability theory. Then, the adaptive control is designed by a
suitable updated law. Finally, a numerical simulation is given to illustrate the effectiveness of the obtained
result.
1 INTRODUCTION
During past several years, the stabilization and the
synchronization of neural networks (NNs) are
studied deeply in many fields (Y. Cao, 2016), such
as the robot path planning, and the multi-robot
cooperation. In the control system, the model of the
the corresponding system is different when there is
the disturbance in the system (X. Liu, 2016).
According to the transformation relationship of
Markovian chain, these different corresponding
systems are established as a new system, which is
called Markovian switching system. In the NNs,
many phenomena can be modeled by the Markovin
switching system, such as the packet loss and the
time delay. By modeling the Markovian switching
system, some detail problems can be ignored and the
performance of the system can be studied
macroscopically.
The time-varying delay is inescapable in NNs.
And NNs often produce the chattering and the
instability (X. M. Zhang, 2017). Also, the time-
varying delay, which can be called as the neutral
delay, may exist in the derivative of the system state
(D. Tong, 2017).
On the other hand, it is well known that the finite
time synchronization can be obtained in NNs. In
reality, NNs would be more economical if the
synchronization can be achieved as quickly as
possible. In (X. Liu, 2016), the problem of the finite-
time synchronization for coupled NNs with a
switching approach networks was investigated.
Nowadays, many control methods have been
investigated, such as the adaptive control (D. Tong,
2016; R. Guo, 2019), the periodically intermittent
control (C. Li, 2007), the discontinuous grid current
control (Y. Son, 2017) and the phase current-balance
control (J. Han, 2016). The exponential
synchronization has been studied by the adaptive
control for NNs (W. Zhou, 2012). Furthermore, the
parameters of the adaptive control need to be
estimated and evolved by some update laws. The
exponential stabilization problem for complex
systems is investigated by the periodically
intermittent control (Z. W. Liu, 2017). Adaptive
control is an efficacious control method to achieve
synchronization for NNs, and this motivates
researchers’ interests.
Motivated by the discussions earlier, the adaptive
controller is given to solve the finite-time
synchronization problem of NTNNs with multi-
delays and the Markovian switching. The criteria of
the finite synchronization is obtained by
constructing a Lyapunov functional and taking the
LMI toolbox. Finally, a numerical simulation is
provided to prove the effectiveness of the result.
Shi, H. and Tong, D.
Finite-Time Synchronization for Neutral-Type Neural Networks with Markovian Switching and Multi-Delays.
DOI: 10.5220/0008855703730377
In Proceedings of 5th International Conference on Vehicle, Mechanical and Electrical Engineering (ICVMEE 2019), pages 373-377
ISBN: 978-989-758-412-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
373

2 PROBLEM STATEMENTS
Consider the following drive system with multi-
delays and the Markovian switching as
[ ( ) ( )
[ ( ) ( ( ))]
( ) ( ( ( )))]
( ( )
(
)
)
t
t0
n
t
t
=1
A
= - B r x(t)+E r h x
d x t - r x t - t
+ F r h x t -
t
t d t ,
(1)
Where
( ) R
n
xt
is state vectors. And
t
r
is a
continuous-time Markov process with a transition
probability matrix
{ }
ij q q
which is presented as
( ), ,
{}
1 ( ), .
ij
tt
ij
ij
Pr r j r i
ij
∣
(2)
Here
0
()
lim 0,
1,
z
ii ij
j j i
and
0
ij
,
, , , 1,2, ,i j i j
are transition rates from
mode
i
to mode
j
, when the corresponding time
t
to time
t
.
()
nn
t
B r R
is a diagonal positive
constant matrix.
()
nn
t
A r R
,
()
nn
t
E r R
and
1
()
n
nn
t
F r R
are matrices associated with
connection weight and the delayed connection
weight. A continuous activation function
( ( ))
n
h x t R
satisfies
(0) 0.h
,
kt
is the time-
varying delay which satisfies
,
0
kt
, and
,
1
kt
, where
and
are given positive
constants.
Consider the controlled response system as
0
1
[ ( ) ( ) ( ( ))]
[ ( ) ( ) ( ) ( ( ))
( ) ( ( ( ))) ( )] ( ),
t
tt
n
t
d y t A r y t t
B r y t E r h y t
F r h y t t U t d t
(3)
Where
()
n
y t R
is state vectors. The error
system is expressed by
)( )) ((ytet xt
. and let
( ) ( ) ( ( ))e t e t e t t
and
0
0
( ) ( ) ( ( ))e t e t e t t
.
()
nn
Ut R
is the controller which is designed as
follows,
0
0
0
0
0
1
2
()
12
2
| ( ) ( ) |
( ) (diag{ ( ), ( ), , ( )}
| ( ) |
( ( ) )
)( ( ) ),
| ( ) |
()
()
()
()
t
T
tt
n
i
i
i
i
e s Ge s ds
U t k t k t k t I
e t A
sign e t A
e t A
et
e
eA
et
et
t
t
With the updated law
0
2
([ ( ) ( )])
i
j j i j j
j
etk q e A sign k
, where
1,2, ,
,0
jn
and
are arbitrary constants,
G
is a definite matrix. Let
() ,
i
t
A r A
() ,
i
t
B r B
() ,
i
t
E r E
11
() ,
nn
i
t
F r F
the error system is
0
1
[ ( ) ]
[ ( ) ( ( ))
) ( ) ( )]
()
) ( ).(
i
ii
n
i
d e t A
B e t E h e t
et
etF h U t d t
(4)
Assumption 1: For neutral-type parameters
matrices
( 1,2, , )
i
A i N
, there are positive
(0,1)
i
, such that
( ) ,
i
i
A
Where
max
i S i
, and
()
i
A
are the spectral
radius of matrix
i
A
.
Assumption 2: There exist constants
z
and
z
such that all activation functions of Eqs (1), (3) and
(4) satisfy the following conditions,
12
12
( ) ( )
,
h m h m
zz
mm
Where
1 2 1 2
, , .m m R m m
Definition 1: Supposed that a continuous and
positive-definite function
()Vt
satisfies the
following differential inequality:
0
( ) ( ), ,
V t V t t t
Where
0
and
01
are two positive
constants. Then, for any
0
0t
and the initial
condition
0
( ) 0Vt
,
()Vt
satisfies
11
0 0 0
( ) ( ) (1 )( ), ,V t V t t t t t T
( ) 0, ,V t t T
where
1
00
( ) / (1 )
T t V t
.
Lemma 1: Let
,
n
R
, then
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
374

1
,
T T T T
Where
0
.
Lemma 2: The following inequality
2 2 1 1
1/ 1/
11
( ) ( )
nn
ii
Holds for any positive constants
12
,,,
n
and
12
0
.
3 MAIN RESULTS
Theorem 1: Under Assumption 1-2, NTNNs (3)
can be finite-time synchronized with system (1), if
there exist positive
, q
and , such that
2
0
2 0,b b z
22
(1 ) 0,z
(5)
0nf
,
Where
min ( ( )),
iN
G
min ( ( )),
i
iN
bB
2
0
max ( ( )) ,
i
iN
bB
2
max ( ( )) ,
i
iN
E
max( , ),
z z z
2
max ( ( )) , 1,2, , .
i
i
f F n
Proof: Choose a Lyapunov function candidate as
0
0
2
2
()
1
( , , ( )) | ( ) |
1
(
(
)
)
( ) .
i
i
n
t
T
j
tt
j
j
V t i e t q e t A
e s Ge s d
e
s
t
k
Taking the derivative of
()Vt
with respect to
t
along with the trajectories of system (4), one has
0
0
0
0
0
0
0
12
1
()
2
()
2 [ ( ) ] [ ( ) ( ( ))
( ) (diag{ ( ), ( ), , (
()
)}
( ( ) )
| ( ) |
( ) ( )
()
()
()
()
( ) ( )
] ( ) ( )
| ( ) |
(1 ))
i T i i
i
n
i
n
i
i
t
T
tt
T
i
T
Vt
q e t A B e t E h e t
F h k t k t k t
sign e t
et
et
et
et
et
e t e t
A
I
e t A
e s Ge s ds
e t Ge t
e t A
G
1
2 ( )
n
ij ij
j
ij
k sign k
0
0
0
0
0
0
0
1
2
()
2
1
1
2 [ ( ) ] ( )
| ( ) |
2 [ ( ) ] ( )
|
()
()
( ) ( )
()
( ) (
( ) ( ) |
| ( ) | ( ) ( )
2 [ ( )
(
) ] ( )
2 [ ( ) )][
i T i
i
i
i
i T i
i
t
T
i
tt
z
iT
j ij
j
n
i T i
i
iT
i
q e t A B e t
q e t A
q e t A E h
q e s Ge s ds
q e t A e t Ge t
q e t A F h
q
et
et
e t e t
et
e t e t
e t A et
0
00
[ ( ) ]
(1 ))
()
( ) ( .)
i
i
T
et
e
I e t A
Gt e t
(6)
It follows from Assumption 1 that
0
0
00
0
2
2 2 2
0
2 2 2
0
2 [ ( ) ] ( )
2 ( ) ( ) 2 [ ] ( )
2 | ( ) | [ ]
( )[ ] ( )
(2 ) | ( ) | | |
(2 ) | ( ) | | |
()
( ) ( )
()
()
i T i
i
T i i T i
ii
i T i
ii
T i T i
i
ii
ii
T
T
q e t A B e t
q e t B e t q A B e t
qb e t
et
e
q A A
q e t B B e t
q b b e
e t e t
et
et
tq
q b b e t q
,
(7)
Where
(0,1,., )
| ( ) | max | |
T
n
e et
.
Using Assumption 2 and Lemma 1, one can
obtain
0
00
2 2 2
2 [ ( ) ] ( ( ))
[ ( ) ] [ ] [ ( ) ]
()
( ) ( )
( ) .
( ( )) ( ( ))
| ( ) | | ( ) |
i T i
i
i T i T i i
i
T
i
i
i
q e t A E h e t
q e t A E E e t A
q h e t h e t
q
et
e t e t
ee t qz ttAe
(8)
From Assumption 2, one has
Finite-Time Synchronization for Neutral-Type Neural Networks with Markovian Switching and Multi-Delays
375

0
1
2 2 2
( ) ( )2 [ ( ) ] ( )
()| ( ) | | | ,()
n
i T i
i
i
i
e t e tq e t A F h
nqd e t A qe t e tz
(9)
00
22
( ) ( ) (1 )
| ( ) | ( | |)1) ( .
TT
ee
e
e t Ge t G
e tt
(10)
Then, one can obtain that
1
2 1/2
11
2 ( )
1
2 | | 2 ( ) .
n
ij ij
j
ij
nn
ij j
jj
ij
ij
k sign k
kk
(11)
It can be deduced from inequalities (6)-(11) and
Theorem 1 that
0
0
2 1/2
1
1
2
()
1
( ) 2 ( ) | ( ) |
| ( ) .( ) |
n
i
ji
j
ij
t
T
i
tt
V t k q e t A
q e s Ge s ds
e
(12)
By Lemma 2, we have
0
0
0
0
2 1/2
1
1
2
()
22
1
1
2
()
()
1
( ) | ( ) |
- | ( ) ( ) |
1
( | ( ) |
( ) ( ) ) ,+
n
i
ji
j
ij
t
T
tt
n
i
ij
j
ij
t
T
tt
Vt
k q e t A
e s Ge s ds
q e t A k
e s Ge s d
e
s
e
Where
min {2 , }
ii
iN
qq
,
, one can
easily get
1/2
( ) [ ( )]V t V t
. According to Lemma 3,
we know that
{ ( )} 0E V T
as
00
{ } ( )E T t V t
.
Since
( ) 0,Vt
it can derived that
{|| ( )||} 0E e t
when
tT
. The proof is completed.
Remark 1: An appropriate
can be easily find
by the LMI of Theorem 1. For instance, let
1.75, 0.5, 0.2q
, then
0.35
. Then,
the conditions in Theorem 1 can also be easily
checked.
4 NUMERICAL EXAMPLES
One example is presented to indicate the
effectiveness of our results. Consider a time-delayed
NTNNs (1) and its response system (3) with
following network parameters,
12
12
12
0.3 0 0.2
0 0.3 0 0.2
2.3 0 3.3
0
,,
0
,,
0.5 1
,,
0 2.7 0 2.
1
-0.3 -1.6
.6
8
0.1 0 2.8
AA
BB
EE
11 12
21 22
0
,,
-0.
0.3 1,5 1.8
0 0.7 2.3
0
1.7
0.5 1
,,
1.1 0 2.8
3 -1
.6
.6
FF
FF
33
, ( ( )) 0.3tanh( ( )),
22
0.12, 0.2, 0.43.
h e t e t
z
.
Initial values of system (4) are set to be
(0) [0.2,3.7] , (0) [0.11,0.18]
TT
ek
. The
dynamic curve
e
of NTNNs without the controller is
not synchronization. In the example, the following
results can be obtained by solving the LMI (5) based
on the Matlab toolbox, and it obtains that
0.57, ,q= 2.17 =1.52
.
The dynamic curve of the NTNNs (4) with the
controller is illustrated by FIG. 1. And the dynamic
curve of the adaptive gain
()kt
is given in FIG. 2.
Thus, one can see that the zero solution of NTNNs
(4) can be got via the adaptive control.
Figure 1. Dynamic curve of NTNNs
()et
with control.
0 2 4 8 10
-1.5
-1
0
1
2
3
t
e
1
(t); e
2
(t)
e
1
(t)
e
2
(t)
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
376
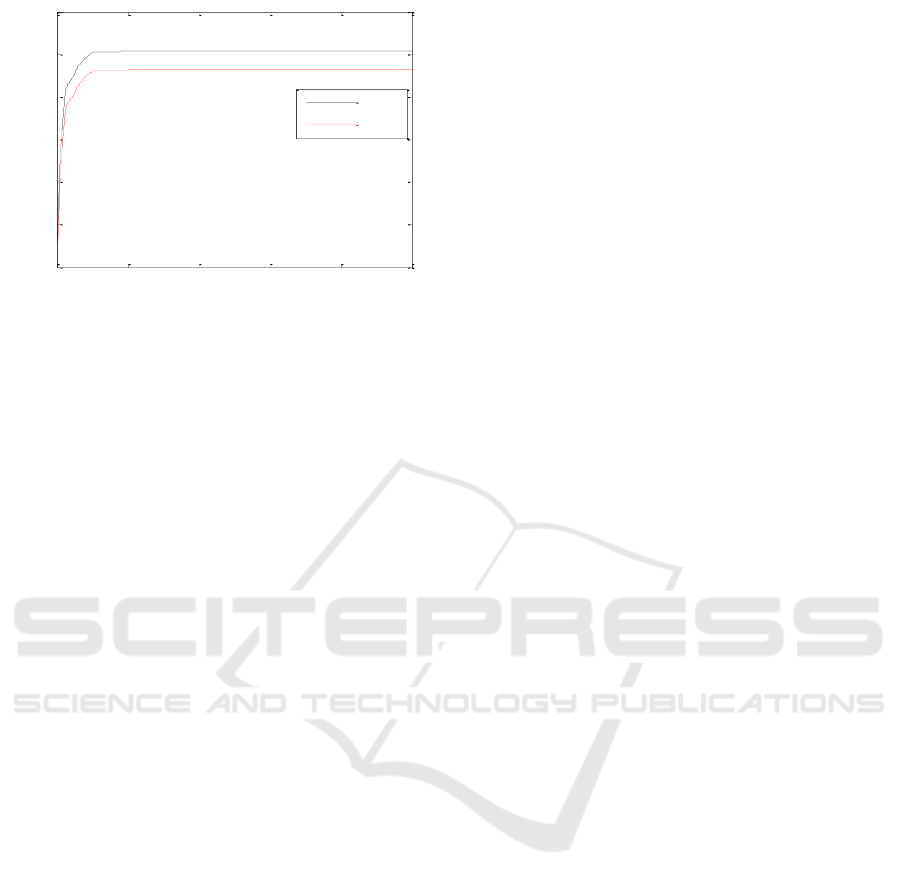
Figure 2 Dynamic curve of adaptive control gain
()kt
.
5 CONCLUSION
The finite-time synchronization problem for NTNNs
is considered by using the adaptive control with
mutil-delays and the Markovian switching.
Sufficient synchronization conditions for the
coexistence of the neutral item, time-varying delays,
the Markovian switching in NTNNs with the
adaptive control are given to solve the difficulty of
the mathematical complexity.
REFERENCES
C. Li, G. Feng, and X. Liao, 2007. “Stabilization of
nonlinear systems via periodically intermittent control,”
IEEE Trans.Circuits Syst. Express Briefs, vol. 54, no.
11, pp. 1019–1023.
D. Tong and Q. Chen, 2017. “Delay and its time-
derivative dependent model reduction for neutral-type
control system,” Circuits Syst. Signal Process, vol. 36,
no. 6, pp. 2542–2557.
D. Tong, L. Zhang, W. Zhou, J. Zhou, and Y. Xu, 2016.
“Asymptotical synchronization for delayed stochastic
neural networks with uncertainty via adaptive control,”
Int. J. Control Autom. Syst., vol. 14, no. 3, pp. 706–
712.
J. Han and J.-H. Song, 2016. “Phase current-balance
control using DC-link current sensor for multiphase
converters with discontinuous current mode
considered,” IEEE Trans. Ind.Electron., vol. 63, no. 7,
pp. 4020–4030.
R. Guo, Z. Zhang, C. Lin, Y. Chu, and Y. Li, 2019. “Finite
time state estimation of complex-valued BAM neutral-
type neural networks with time-varying delays,” Int. J.
Control Autom. Syst., vol. 17, no. 3, pp. 801–809.
W. Zhou, D. Tong, Y. Gao, C. Ji, and H. Su, 2012. “Mode
and delay-dependent adaptive exponential
synchronization in pth moment for stochastic delayed
neural networks with Markovian switching,” IEEE
Trans. Neural Netw. Learn. Syst., vol. 23, no. 4, pp.
662–668.
X. Liu, H. Su, and M. Z. Chen, 2016. “A switching
approach to designing finite-time synchronization
controllers of coupled neural networks,” IEEE Trans.
Neural Netw. Learn. Syst., vol. 27, no. 2, pp. 471–482.
X. M. Zhang, Q. L. Han, Z. Wang, and B.-L. Zhang, 2017.
“Neuronal state estimation for neural networks with
two additive time-varying delay components,” IEEE
Trans. Cybern., vol. 47, no. 10, pp. 3184–3194.
Y. Cao, S. Wen, M. Z. Chen, T. Huang, and Z. Zeng, 2016.
“New results on anti-synchronization of switched
neural networks with time-varying delays and lag
signals,” Neural Netw., vol. 81, pp. 52–58.
Y. Son and J.-I. Ha, 2017. “Discontinuous grid current
control of motor drive system with single-phase diode
rectififier and small DC-link capacitor,” IEEE Trans.
Power Electron., vol. 32, no. 2, pp. 1324–1334.
Z. W. Liu, X. Yu, Z.-H. Guan, B. Hu, and C. Li, 2017.
“Pulse modulated intermittent control in consensus of
multiagent systems,” IEEE Trans. Syst. Man Cybern.
Syst., vol. 47, no. 5, pp. 783–793.
0 1 2 3 4 5
0
1
2
3
4
5
6
t
k
1
(t),k
2
(t)
k
1
(t)
k
2
(t)
Finite-Time Synchronization for Neutral-Type Neural Networks with Markovian Switching and Multi-Delays
377
