
Uncertainty and Fuzzy Modeling in Human-robot Navigation
Rainer Palm and Achim J. Lilienthal
AASS, Dept. of Technology,
¨
Orebro University, SE-70182
¨
Orebro, Sweden
Keywords:
Human-robot Interaction, Navigation, Fuzzy Modeling, Gaussian Noise.
Abstract:
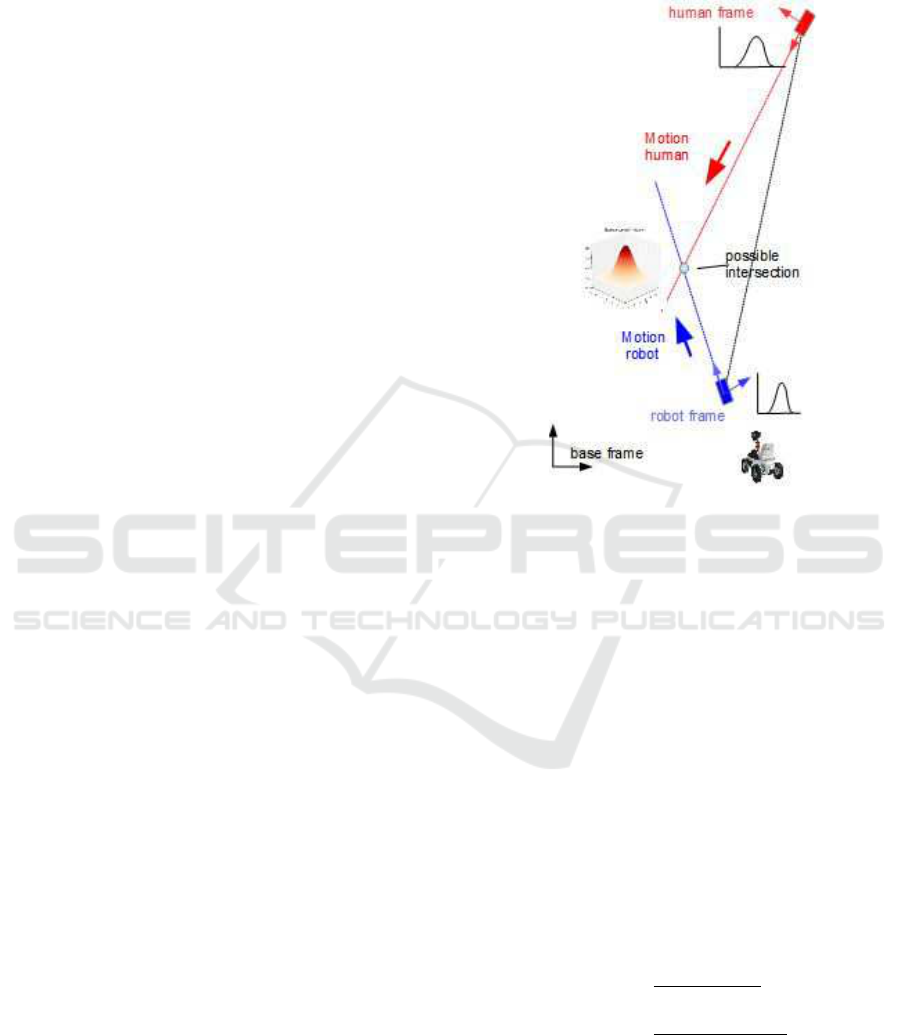
The interaction between humans and mobile robots in shared areas requires a high level of safety especially
at the crossings of the trajectories of humans and robots. We discuss the intersection calculation and its
fuzzy version in the context of human-robot navigation with respect to noise information. Based on known
parameters of the Gaussian input distributions at the orientations of human and robot the parameters of the
output distributions at the intersection are to be found by analytical and fuzzy calculation. Furthermore the
inverse task is discussed where the parameters of the output distributions are given and the parameters of the
input distributions are searched. For larger standard deviations of the orientation signals we suggest mixed
Gaussian models as approximation of nonlinear distributions.
1 INTRODUCTION
Activities of human operators and mobile robots in
shared areas require a high degree of system stabil-
ity and security. Planning of mobile robot tasks,
navigation and obstacle avoidance were major re-
search activities for many years (Khatib, 1985; Firl,
2014; Palm and Lilienthal, 2018). Using the same
workspace at the same time requires adapting the be-
havior of human agents and robots to facilitate suc-
cessful collaboration or support separate work for
both. (O.H.Hamid and N.L.Smith, 2017) present a
general discussion on robot-human interactions with
the emphasis on cooperation. In this context, recog-
nizing human intentions to achieve a particular goal
is an important issue reported by (Tahboub, 2006;
Fraichard et al., 2014; Palm et al., 2016; Palm and
Iliev, 2007). The problem of crossing trajectories be-
tween humans and robots is addressed by Bruce et
al. who describe a planned human - robot rendezvous
at an intersection zone (Bruce et al., 2015). In this
connection the goal to achieve more natural human-
robot interactions is obtained by human-like sensor
systems as they share their functional principle with
natural systems (Robertsson et al., 2007; Palm and
Iliev, 2006; Kassner et al., 2014). Based on an es-
timate of the positions and orientations of robot and
human, the intersections of the intended linear trajec-
tories of robot and human are calculated. Due to sys-
tem uncertainties and observation noise, the intersec-
tion estimates are also corrupted by noise. In (W.Luo
et al., 2014) and (J.Chen et al., 2018) a multiple tar-
get tracking approach for robots and other agents are
discussed from the point of view of a higher control
control level. In our paper we concentrate on the one-
robot one-human case in order to go deeper into the
problem of accuracy and collision avoidance in the
case of short distances between the acting agents. De-
pending on the distance between human and robot,
uncertainties in the orientation between human and
robot with standard deviations of more than one de-
gree can lead to high uncertainties at the points of
intersection. For security reasons and for effective
cooperation between human and robot, it is therefore
essential to predict uncertainties at possible crossing
points. The relationship between the position and ori-
entation of the human/robot and the intersection coor-
dinates is non-linear, but can be linearized under cer-
tain constraints. This is especially true if we only con-
sider the linear part of correlation between input and
output of a nonlinear transfer element (R.Palm and
Driankov, 1993; Banelli, 2013) and for small stan-
dard deviations at the input. For fuzzy systems two
main directions to deal with uncertain system inputs
are the following: One direction is the processing
of fuzzy inputs (inputs that are fuzzy sets) in fuzzy
systems (R.Palm and Driankov, 1994; L.Foulloy and
S.Galichet, 2003; H.Hellendoorn and R.Palm, 1994).
Another direction is the fuzzy reasoning with proba-
bilistic inputs (Yager and Filev, 1994) and the trans-
formation of probabilistic distributions into fuzzy sets
(Pota et al., 2011). Both approaches fail more or less
to solve the practical problem of processing a proba-
bilistic distribution through a static nonlinear system
296
Palm, R. and Lilienthal, A.
Uncertainty and Fuzzy Modeling in Human-robot Navigation.
DOI: 10.5220/0008344902960305
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 296-305
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
that is both analytically and fuzzily described. The
motivation to deal with uncertain/fuzzy inputs in an
analytical way is to predict future situations such as
collisions at specific areas and to use this information
for feed forward control actions and re-planning of
trajectories. In the case of a static fuzzy system we
have to deal with fuzzy problems twofold: the fuzzy
system itself in form of a set of fuzzy rules and an in-
put signal being interpreted as fuzzy input. This is es-
pecially important when human agents come into play
whose intentions, actions and reactions are difficult to
predict and interpret by a robot. There are many is-
sues to consider in this context but the point to avoid
collisions or enable cooperations between human and
robot is one of the basic issues that is going to be dis-
cussed. Therefore in this paper we address the fol-
lowing direct task: given the parameters of Gaussian
distributions at the input of a fuzzy system, find the
corresponding parameters of the output distributions.
The inverse task means: Given the output distribution
parameters, find the input distribution parameters. An
application is the bearing task for intersections of pos-
sible trajectories emanating from different positions
for the same target. In the following we restrict our
consideration to the static case in order to show the
general problems and difficulties. In the context of
larger standard deviations at the input, we address the
case of mixed Gaussian distributions. The paper is
organized as follows. Section 2 deals with Gaussian
noise and the bearing problem in general and its an-
alytical approach. In Section 3 the inverse problem
is addressed that is to find the input distribution pa-
rameters while the output parameters are given. Sec-
tion 4 deals with the local linear fuzzy approximation
of the nonlinear analytical calculation. In Section 5
the extension from two orientation inputs to another
four position inputs is discussed. In Section 6 mixed
Gaussian distributions and their contribution to the in-
tersection problem are presented. Section 7 deals with
simulations to show the influence of the resolution of
the fuzzy system on the accuracy at the system output.
Finally, Section 8 concludes the paper.
2 GAUSSIAN NOISE AND THE
BEARING PROBLEM
2.1 Computation of Intersections -
Analytical Approach
The following computation deals with the intersection
(x
c
,y
c
) of two linear paths x
R
(t) and x
H
(t) in a plane
along which robot and human intend to move. x
H
=
(x
H
,y
H
) and x
R
= (x
R
,y
R
) are the position of human
and robot and φ
H
and φ
R
their orientation angles (see
Figs. 1 and 2).
Figure 1: Human-robot scenario.
Then we have the relations
x
H
= x
R
+ d
RH
cos(φ
R
+ δ
R
)
y
H
= y
R
+ d
RH
sin(φ
R
+ δ
R
) (1)
x
R
= x
H
+ d
RH
cos(φ
H
+ δ
H
)
y
R
= y
H
+ d
RH
sin(φ
H
+ δ
H
)
where positive angles δ
H
and δ
R
are measured from
the y coordinates counterclockwise. Angle
˜
β = π −
δ
R
−δ
H
is the angle at the intersection.
The variables x
H
, x
R
, φ
R
, δ
H
, δ
R
, d
RH
and the an-
gle γ are supposed to be measurable. The unknown
orientation angle φ
H
is computed by
φ
H
= arcsin((y
H
−y
R
)/d
RH
) −δ
H
+ π (2)
After some substitutions we obtain the coordinates
x
c
and y
c
straight forward
x
c
=
A −B
tanφ
R
−tan φ
H
y
c
=
Atanφ
H
−B tan φ
R
tanφ
R
−tan φ
H
(3)
A = x
R
tanφ
R
−y
R
B = x
H
tanφ
H
−y
H
Rewriting (3) leads to
Uncertainty and Fuzzy Modeling in Human-robot Navigation
297
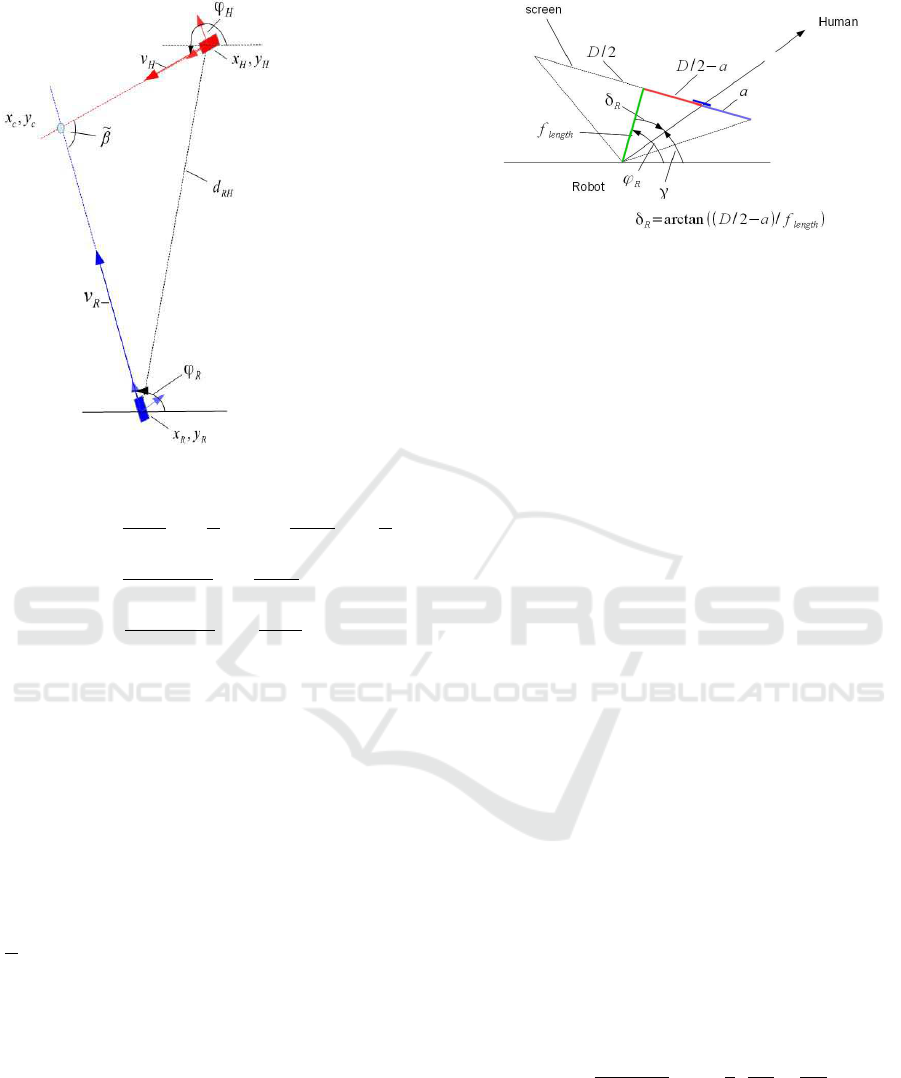
Figure 2: Human-robot scenario: geometry.
x
c
=
x
R
tanφ
R
G
−y
R
1
G
−
x
H
tanφ
H
G
−y
H
1
G
y
c
=
x
R
tanφ
R
tanφ
H
G
−y
R
tanφ
H
G
−
x
H
tanφ
H
tanφ
R
G
−y
H
tanφ
R
G
(4)
G = tanφ
R
−tan φ
H
which is a form that can be used for the fuzzification
of (3)
Having a look at (4) we see that x
c
= (x
c
,y
c
)
T
is
linear in x
RH
= (x
R
,y
R
,x
H
,y
H
)
T
x
c
= A
RH
·x
RH
(5)
where
A
RH
= f (φ
R
,φ
H
) =
1
G
tanφ
R
−1 −tanφ
H
1
tanφ
R
tanφ
H
−tanφ
H
−tanφ
R
tanφ
H
tanφ
H
To achieve the orientation of the human operator
a scenario is recorded by human eye tracking plus a
corresponding camera picture that is taken from the
human’s position and sent to the robot (Palm and
Lilienthal, 2018). The robot measures its own posi-
tion/orientation and the human’s position. From the
human’s screen-shot the robot calculates
- orientation of human
- expected intersection
- direction of human’s gaze to robot or object
- position of object
Figure 3: Camera geometry.
From the robot’s point of view a picture from the
scene is taken from which we obtain a projection of
the human image onto the camera screen(see Fig. 3).
From the focal length f
length
, the width D of the screen
and the distance a, an angle δ
R
is computed
δ
R
= arctan((D/2 −a)/ f
length
) (6)
from which the orientation angle φ
H
of the human is
calculated (see also Fig. 2) and (2)
The TS-fuzzy approximation of (5) is given by
(Palm and Lilienthal, 2018)
x
c
=
∑
i, j
w
i
(φ
R
)w
j
(φ
H
) ·A
RH
i, j
·x
RH
(7)
w
i
(φ
R
),w
j
(φ
H
) ∈ [0,1] are normalized member-
ship functions with
∑
i
w
i
(φ
R
) = 1 and
∑
j
w
j
(φ
H
) = 1.
The following paragraph deals with the accuracy of
the computed intersection in the case of distorted ori-
entation information.
2.2 Transformation of Gaussian
Distributions
2.2.1 General Considerations
Let us consider a static nonlinear system
z = F(x) (8)
with two inputs x = (x
1
,x
2
)
T
and two outputs
z = (z
1
,z
2
)
T
where F denotes a nonlinear system. Let
further the uncorrelated Gaussian distributed inputs x
1
and x
2
be described by the 2-dim density
f
x
1
,x
2
=
1
2πσ
x
1
σ
x
2
exp(−
1
2
(
e
2
x
1
σ
2
x
1
+
e
2
x
2
σ
2
x
2
)) (9)
where e
x
1
= x
1
− ¯x
1
, ¯x
1
- mean(x
1
), σ
x
1
- standard
deviation x
1
and e
x
2
= x
2
− ¯x
2
, ¯x
2
- mean(x
2
), σ
x
2
-
standard deviation x
2
.
The question arises how the output signals z
1
and
z
2
are distributed in order to obtain their standard de-
viations and the correlation coefficient between the
FCTA 2019 - 11th International Conference on Fuzzy Computation Theory and Applications
298

outputs. For linear systems Gaussian distributions are
linearly transformed which means that the output sig-
nals are also Gaussian distributed. In general, this
does not apply for nonlinear system as in our case.
However, if we assume the input standard deviations
small enough then we can construct local linear trans-
fer functions for which the output distributions are
Gaussian distributed but with correlated output com-
ponents.
f
z
1
,z
2
=
1
2πσ
z
1
σ
z
2
q
1 −ρ
2
z
12
· (10)
exp(−
1
2(1 −ρ
2
z
12
)
(
e
2
z
1
σ
2
z
1
+
e
2
z
2
σ
2
z
2
−
2ρ
z
12
e
z
1
e
z
2
σ
z
1
σ
z
2
))
ρ
z
12
- correlation coefficient.
2.2.2 Differential Approach
Function F can be described by individual smooth and
nonlinear static transfer functions (see block scheme
4) where (x
1
,x
2
) = (φ
R
,φ
H
) and (z
1
,z
2
) = (x
c
,y
c
)
z
1
= f
1
(x
1
,x
2
)
z
2
= f
2
(x
1
,x
2
) (11)
Linearization of (11) yields
dz =
˜
J ·dx or e
z
=
˜
J ·e
x
(12)
with
e
z
= (e
z
1
,e
z
2
)
T
and e
x
= (e
x
1
,e
x
2
)
T
(13)
dz = (dz
1
,dz
2
)
T
and dx = (dx
1
,dx
2
)
T
˜
J =
∂ f
1
/∂x
1
,∂ f
1
/∂x
2
∂ f
2
/∂x
1
,∂ f
2
/∂x
2
(14)
Figure 4: Differential transformation.
2.2.3 Specific Approach to the Intersection
In addition to the exact solution (4) we look at the
differential approach. This is important if the con-
tributing agents change their directions of motion. A
further aspect is to quantify the uncertainty of x
c
in
the presence uncertain angles φ
R
and φ
H
or in x
RH
=
(x
R
,y
R
,x
H
,y
H
)
T
.
Differentiating (4) with x
RH
= const. yields
˙
x
c
=
˜
J ·
˙
φ
˙
φ = (
˙
φ
R
˙
φ
H
)
T
;
˜
J =
˜
J
11
˜
J
12
˜
J
21
˜
J
22
(15)
where
˜
J
11
=
−tanφ
H
1 tanφ
H
−1
x
RH
G
2
·cos
2
φ
R
˜
J
12
=
tanφ
R
−1 −tanφ
R
1
x
RH
G
2
·cos
2
φ
H
˜
J
21
=
˜
J
11
·tan φ
H
˜
J
22
=
˜
J
12
·tan φ
R
2.2.4 Output Distribution
To obtain the density f
z
1
,z
2
of the output signal we
invert (13) and substitute the entries of e
x
into (9)
e
x
= J ·e
z
(16)
with J =
˜
J
−1
and
J =
J
11
J
12
J
21
J
22
=
j
xz
j
yz
(17)
where j
xz
= (J
11
,J
12
) and j
yz
= (J
21
,J
22
). Entries J
i j
are the result of the inversion of
˜
J. From this substi-
tution which we get
f
x
1
,x
2
= K
x
1
,x
2
·
exp(−
1
2
·e
z
T
·(j
x
1
,z
T
,j
x
2
,z
T
) ·S
−1
x
·
j
x
1
,z
j
x
2
,z
·e
z
) (18)
where K
x
1
,x
2
=
1
2πσ
x
1
σ
x
2
and
S
−1
x
=
1
σ
2
x
1
,0
0,
1
σ
2
x
2
(19)
The exponent of (18) is rewritten into
xpo = −
1
2
·(
1
σ
2
x
1
(e
z
1
J
11
+ e
z
2
J
12
)
2
+
1
σ
2
x
2
(e
z
1
J
21
+ e
z
2
J
22
)
2
) (20)
and furthermore
xpo = −
1
2
·[e
2
z
1
(
J
2
11
σ
2
x
1
+
J
2
21
σ
2
x
2
) + e
2
z
2
(
J
2
12
σ
2
x
1
+
J
2
22
σ
2
x
2
) +
2 ·e
z
1
e
z
2
(
J
11
J
12
σ
2
x
1
+
J
21
J
22
σ
2
x
2
)] (21)
Uncertainty and Fuzzy Modeling in Human-robot Navigation
299

Now, we compare xpo in (21) with the exponent
in (10) of the output density (10)
Let
A = (
J
2
11
σ
2
x
1
+
J
2
21
σ
2
x
2
); B = (
J
2
12
σ
2
x
1
+
J
2
22
σ
2
x
2
)
C = (
J
11
J
12
σ
2
x
1
+
J
21
J
22
σ
2
x
2
) (22)
then a comparison of xpo in (21) and the exponent in
(10) yields
1
(1 −ρ
2
z
12
)
1
σ
2
z
1
= A;
1
(1 −ρ
2
z
12
)
1
σ
2
z
2
= B
−2ρ
z
12
(1 −ρ
2
z
12
)
1
σ
z
1
σ
z
2
= 2C (23)
from which we finally get the correlation coefficient
ρ
z
12
and the standard deviations σ
z
1
and σ
z
2
ρ
z
12
= −
C
√
AB
1
σ
2
z
1
= A −
C
2
B
;
1
σ
2
z
2
= B −
C
2
A
(24)
So once we have obtained the parameters of the
input distribution and the mathematical expression for
the transfer function F(x,y) we can compute the out-
put distribution parameters directly.
3 INVERSE SOLUTION
In the previous presentation we discussed the prob-
lem: Given the parameters of the input distributions
of a nonlinear system, find the parameters of the out-
put distributions. In a bearing task that runs from dif-
ferent positions for the same target it might be helpful
to define a particular bearing accuracy while finding
out the necessary accuracy of the bearing instruments
with regard their bearing angles.
This inverse task we apply is similar to that we dis-
cussed in section 2.2.2. The starting point is equation
(13). Equations (10) describe the densities of the in-
puts and the outputs, respectively. Then we substitute
(13) into (10) and discuss the exponent xpo
z
only
xpo
z
=
−1
2(1 −ρ
2
z
12
)
(e
x
T
˜
J
T
S
−1
z
˜
Je
x
−
2ρ
z
12
e
z
1
e
z
2
σ
z
1
σ
z
2
) (25)
where
S
−1
z
=
1
σ
2
z
1
,0
0,
1
σ
2
z
1
(26)
With
e
z
1
e
z
2
= (
˜
J
11
e
x
1
+
˜
J
12
e
x
2
) ·(
˜
J
21
e
x
1
+
˜
J
22
e
x
2
);
e
x
T
˜
J
T
S
−1
z
˜
Je
x
=
e
2
x
1
(
˜
J
2
11
σ
2
z
1
+
˜
J
2
21
σ
2
z
2
) + e
2
x
2
(
˜
J
2
12
σ
2
z
1
+
˜
J
2
22
σ
2
z
2
)
+2e
x
1
e
x
2
(
˜
J
11
˜
J
12
σ
2
z
1
+
˜
J
21
˜
J
22
σ
2
z
2
) (27)
we obtain for the exponent xpo
z
xpo
z
= −
1
2(1 −ρ
2
z
12
)
(e
2
x
1
(
˜
J
2
11
σ
2
z
1
+
˜
J
2
21
σ
2
z
2
) +
e
2
x
2
(
˜
J
2
12
σ
2
z
1
+
˜
J
2
22
σ
2
z
2
) + 2e
x
1
e
x
2
(
˜
J
11
˜
J
12
σ
2
z
1
+
˜
J
21
˜
J
22
σ
2
z
2
) −
2ρ
z
12
σ
z
1
σ
z
2
(
˜
J
11
e
x
1
+
˜
J
12
e
x
2
) ·(
˜
J
21
e
x
1
+
˜
J
22
e
x
2
)) (28)
and further
xpo
z
= −
1
2
(e
2
x
1
(
˜
J
2
11
σ
2
z
1
+
˜
J
2
21
σ
2
z
2
−
2ρ
z
12
σ
z
1
σ
z
2
˜
J
11
˜
J
21
)/(1 −ρ
2
z
12
)
+e
2
x
2
(
˜
J
2
12
σ
2
z
1
+
˜
J
2
22
σ
2
z
2
−
2ρ
z
12
σ
z
1
σ
z
2
˜
J
12
˜
J
22
)/(1 −ρ
2
z
12
)
+
2e
x
1
e
x
2
(1 −ρ
2
z
12
)
·(
˜
J
11
˜
J
12
σ
2
z
1
+
˜
J
21
˜
J
22
σ
2
z
2
−
ρ
z
12
σ
z
1
σ
z
2
(
˜
J
11
˜
J
22
+
˜
J
12
˜
J
21
)))
(29)
Now, comparing (29) with the exponent of (10) of
the input density we find that the mixed term in (29)
should be zero from which we obtain the correlation
coefficient and the standard deviations of the inputs
ρ
z
12
= (
˜
J
11
˜
J
12
σ
2
z
1
+
˜
J
21
˜
J
22
σ
2
z
2
)
σ
z
1
σ
z
2
(
˜
J
11
˜
J
22
+
˜
J
12
˜
J
21
)
(30)
1
σ
2
x
= (
˜
J
2
11
σ
2
z
1
+
˜
J
2
21
σ
2
z
2
−
2ρ
z
12
σ
z
1
σ
z
2
˜
J
11
˜
J
21
)/(1 −ρ
2
z
12
) (31)
1
σ
2
y
= (
˜
J
2
12
σ
2
z
1
+
˜
J
2
22
σ
2
z
2
−
2ρ
z
12
σ
z
1
σ
z
2
˜
J
12
˜
J
22
)/(1 −ρ
2
z
12
) (32)
4 FUZZY SOLUTION
The previous presentation shows that the computa-
tion of the output distribution can be associated with
high costs which might be problematic especially in
the on-line case. Provided that an analytical represen-
tation (8) is available then we can build a TS fuzzy
model by the following rules R
i j
FCTA 2019 - 11th International Conference on Fuzzy Computation Theory and Applications
300

R
i j
: (33)
IF x
1
= X
1
i
AND x
2
= X
2
i
T HEN ρ
z
12
= −
C
i j
p
A
i j
B
i j
AND
1
σ
2
z
1
= A
i j
−
C
2
i j
B
i j
;
AND
1
σ
2
z
2
= B
i j
−
C
2
i j
A
i j
where X
1
i
,X
2
i
are fuzzy terms for x
1
,x
2
, A
i j
,B
i j
,C
i j
are functions of predefined variables x
1
= x
1
i
and x
2
=
x
2
i
From (33) we get
ρ
z
12
= −
∑
i j
w
i
(x
1
)w
j
(x
2
)
C
i j
p
A
i j
B
i j
1
σ
2
z
1
=
∑
i j
w
i
(x
1
)w
j
(x
2
)(A
i j
−
C
2
i j
B
i j
) (34)
1
σ
2
z
2
=
∑
i j
w
i
(x
1
)w
j
(x
2
)(B
i j
−
C
2
i j
A
i j
)
w
i
(x
1
) ∈ [0, 1] and w
j
(x
2
) ∈ [0, 1] are weighting
functions with
∑
i
w
i
(x
1
) = 1
∑
j
w
j
(x
2
) = 1
5 EXTENSION TO SIX INPUTS
AND TWO OUTPUTS
The previous section dealt with two orientation inputs
and two intersection position outputs where the posi-
tion coordinates of robot and human are assumed to
be constant. Let us again consider the nonlinear sys-
tem
x
c
= F(x) (35)
where F denotes a nonlinear system. Here we
have 6 inputs x = (x
1
,x
2
,x
3
,x
4
,x
5
,x
6
)
T
and 2 out-
puts x
c
= (x
c
,y
c
)
T
. For the bearing problem we get
x = (φ
R
,φ
H
,x
R
,y
R
,x
H
,y
H
)
Let further the uncorrelated Gaussian distributed
inputs x
1
... x
6
be described by the 6-dim density
f
x
i
=
1
(2π)
6/2
|S
x
|
1/2
exp(−
1
2
(e
x
T
S
x
−1
e
x
)) (36)
where e
x
= (e
x
1
,e
x
2
,...,e
x
6
)
T
; e
x
= x−
¯
x,
¯
x - mean(x),
S
x
- covariance matrix.
S
x
=
σ
2
x
1
0 ... 0
0 σ
2
x
2
... 0
... ... ... ...
0 ... 0 σ
2
x
6
The output density is again described by
f
x
c
,y
c
=
1
2πσ
x
c
σ
y
c
p
1 −ρ
2
· (37)
exp(−
1
2(1 −ρ
2
)
(e
T
x
c
S
c
−1
e
x
c
−
2ρe
x
c
e
y
c
σ
x
c
σ
y
c
))
ρ - correlation coefficient.
In correspondence to (8) and (11) function F can
be described by
x
c
= f
1
(x) (38)
y
c
= f
2
(x)
Furthermore we have in correspondence to (15)
e
x
c
=
˜
J ·e
x
(39)
with
˜
J =
˜
J
11
˜
J
12
...
˜
J
16
˜
J
21
˜
J
22
...
˜
J
26
(40)
where
˜
J
i j
=
∂ f
i
∂x
j
, , i = 1, 2 , j = 1,...,6 (41)
Inversion of (40) leads to
e
x
=
˜
J
t
·e
x
c
= J ·e
x
c
(42)
with the pseudo inverse
˜
J
t
= J of
˜
J
J =
J
11
J
12
... ...
J
61
J
62
(43)
where
S
c
−1
=
1
σ
2
x
c
,0
0,
1
σ
2
y
c
!
(44)
Substituting (39) into (36) we obtain
f
x
c
,y
c
= K
x
c
exp(−
1
2
(e
x
c
T
J
T
S
x
−1
Je
x
c
)) (45)
where K
x
c
represents a normalization of the output
density and
Uncertainty and Fuzzy Modeling in Human-robot Navigation
301

J
x
c
= J
T
S
x
−1
J =
A B
C D
where
A =
6
∑
i=1
1
σ
2
x
i
J
2
i1
; B =
6
∑
i=1
1
σ
2
x
i
J
i1
J
i2
(46)
C =
6
∑
i=1
1
σ
2
x
i
J
i1
J
i2
; D =
6
∑
i=1
1
σ
2
x
i
J
2
i2
Substitution of (46) into (45) leads with B = C to
f
x
c
,y
c
= K
x
c
exp(−
1
2
(Ae
2
x
c
+ De
2
y
c
+ 2Ce
x
c
e
y
c
)) (47)
Comparison of (47) with (37) leads with (44) to
ρ = −
C
√
AD
1
σ
2
x
c
= A −
C
2
D
;
1
σ
2
y
c
= D −
C
2
A
(48)
which is the counterpart to the 2 dim input case (24).
5.1 Fuzzy Approach
The first step is to compute values A
i
, B
i
and C
i
from (46) at predefined positions/orientations x =
(x
1
,x
2
,x
3
,x
4
,x
5
,x
6
)
T
i
. Then, we formulate fuzzy rules
R
i
, according to (33) and (34) with i = 1...n, l - num-
ber of fuzzy terms, k = 6 - number of variables n = l
k
- number of rules. With such an increase in the num-
ber of inputs, one unfortunately sees the problem of
an exponential increase in the number of rules, which
is associated with a very high computational burden.
For l = 7 fuzzy terms for each input variable x
k
,
k = 6 we end up with n = 7
6
rules which is much
to high to deal with in a reasonable way. So, one
has to restrict to a reasonable number of variables at
the input of a fuzzy system. This can be done ei-
ther in a heuristic or systematic way (J.Schaefer and
K.Strimmer, 2005) to find out the most influential in-
put variables which is however not the issue of this
paper.
6 MIXED GAUSSIAN
DISTRIBUTIONS
For input signals with larger standard deviations one
cannot assume that the fuzzy system is almost linear
within the operating area. For this reason a distribu-
tion with large standard deviation is approximated by
several distributions with small standard deviations,
where the linearization of the fuzzy system around
their mean values applies. The following analysis ap-
plies with the analytical approach and the fuzzy ap-
proximation too. Let us concentrate on an example of
a mixture of two distributions/densities f
xy1
and f
xy2
f
xy1
=
1
2πσ
x
1
σ
y1
exp(−
1
2
(
e
2
x
1
σ
2
x
1
+
e
2
y1
σ
2
y1
)) (49)
f
xy2
=
1
2πσ
x
2
σ
y2
exp(−
1
2
(
e
2
x
2
σ
2
x
2
+
e
2
y2
σ
2
y2
)) (50)
that are linearly combined
f
xy
= a
1
f
xy1
+ a
2
f
xy2
(51)
with a
i
>= 0 and
∑
i
a
i
= 1 where i = 1, 2
and
e
x
1
= x
1
− ¯x
1
; e
x
2
= x
2
− ¯x
2
e
y1
= y
1
− ¯y
1
; e
y2
= y
2
− ¯y
2
¯x
i
, ¯y
i
are the mean values of x
i
,y
i
.
The partial outputs yield
f
i
z
1
,z
2
=
1
2πσ
i
z
1
σ
i
z
2
q
1 −ρ
i
2
· (52)
exp(−
1
2(1 −ρ
i
2
)
(
e
i
z
1
2
σ
i
z
1
2
+
e
i
z
2
2
σ
i
z
2
2
−
2ρ
i
e
i
z
1
e
i
z
2
σ
i
z
1
σ
i
z
2
))
e
i
z
1
= z
1
−¯z
i
1
; e
i
z
2
= z
2
−¯z
i
2
; ρ
i
- correlation coefficient.
From this we finally obtain the output distribution
f
z
1
,z
2
=
2
∑
i=1
a
i
f
i
z
1
,z
2
(53)
The mixed output distribution f
z
1
,z
2
is a linear com-
bination of partial output distributions f
i
z
1
,z
2
as a re-
sult of the input distributions f
i
x,y
. Given the mean
¯z
i
k
,k = 1,2 and variance σ
i
z
k
2
of the partial output dis-
tributions f
i
z
1
,z
2
. Then we find for mean and variance
of the mixed output distribution
¯z
k
=
2
∑
i=1
¯z
i
k
(54)
σ
z
k
2
= a
1
(σ
z
k
1
)
2
+ a
2
(σ
z
k
2
)
2
+ a
1
a
2
(¯z
1
− ¯z
2
)
2
from which we obtain the standard deviation σ
z
k
of the intersection straight forward.
FCTA 2019 - 11th International Conference on Fuzzy Computation Theory and Applications
302
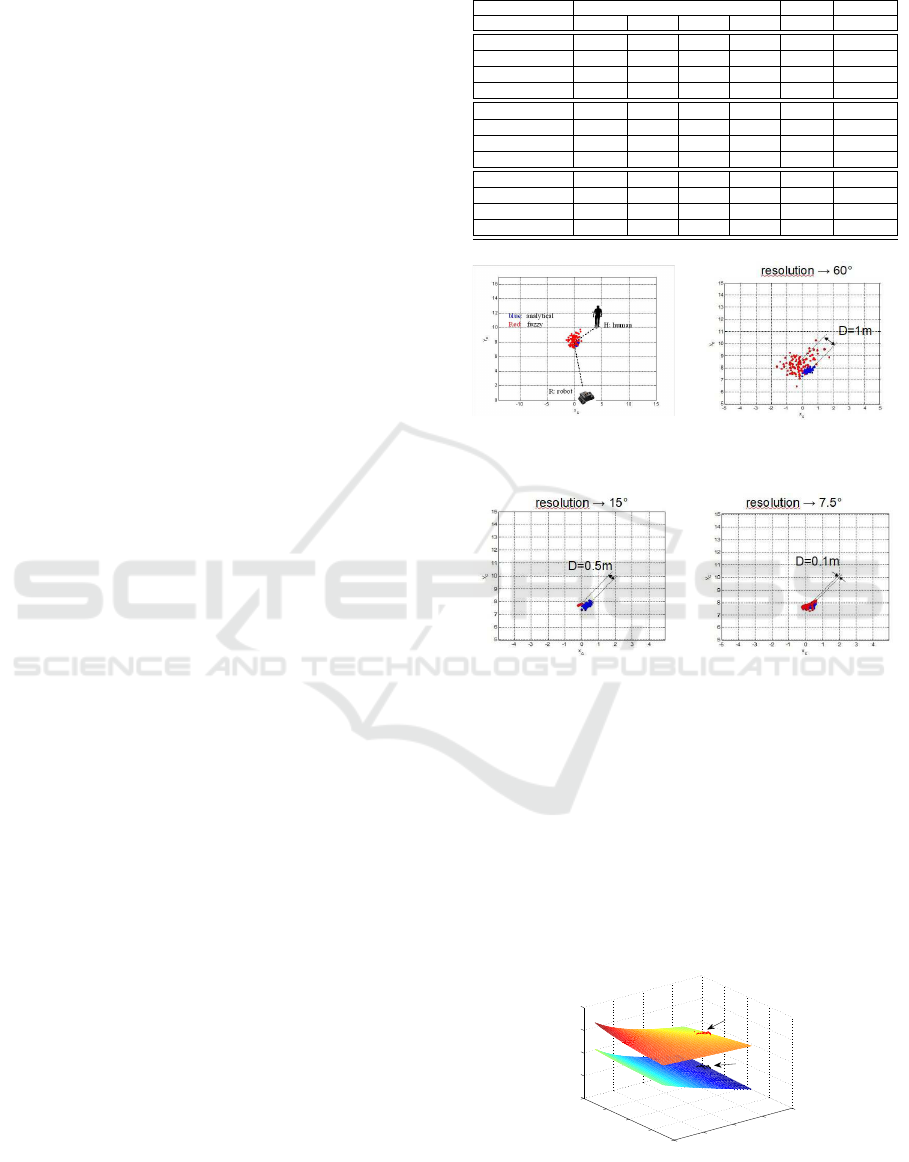
7 SIMULATION RESULTS
Gaussian Input Distributions.
Based on the human-robot intersection example, the
following simulation results show the feasibility to
predict uncertainties at possible intersections by us-
ing analytical and/or fuzzy models for a static situa-
tion (see fig. 2)). Position/orientation of robot and
human are given by x
R
= (x
R
,y
R
) = (2,0)m and x
H
=
(x
H
,y
H
) = (4,10)m and φ
R
= 1.78 rad, (= 102
◦
), and
φ
H
= 3.69 rad, (= 212
◦
). φ
R
and φ
H
are corrupted
with Gaussian noise with standard deviations (std)
of σ
φ
R
= σ
x
1
= 0.02 rad, (= 1.1
◦
). We compared
the fuzzy approach with the analytical non-fuzzy ap-
proach using partitions of 60
◦
,30
◦
,15
◦
,7.5
◦
of the
unit circle for the orientations with results shown in
table 1 and figures 5-8. Notations in table 1 are: σ
z
1
c
- std-computed, σ
z
1
m
- std-measured etc. The num-
bers show two general results:
1. Higher resolutions lead to better results.
2. The performance regarding measured and com-
puted values depends on the shape of membership
functions (mf’s). Lower input std’s (0.02 rad) require
Gaussian mf’s, higher input std’s (0.05 rad = 2.9
◦
)
require Gaussian bell shape mf’s which can be ex-
plained by different smoothing effects (see columns 4
and 5 in table 1).
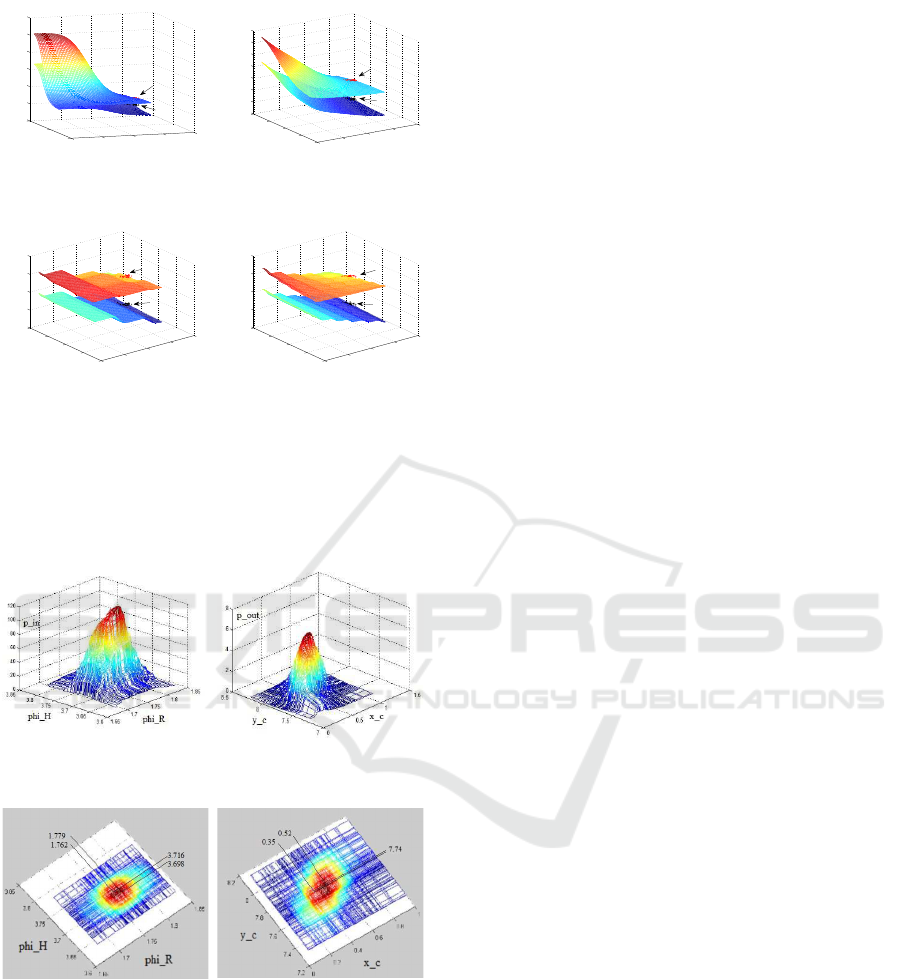
Results 1 and 2 can be explained by the comparison of
the corresponding control surfaces and the measure-
ments (black and red dots) to be seen in figures 9 -
13. Figure 9 displays the control surfaces of x
c
and y
c
for the analytical case (4). The control surfaces of the
fuzzy approximations (7) (see (Palm and Lilienthal,
2018)) are depicted in figures 10 - 13. Starting from
the resolution 60
◦
(fig. 10) we see a very high devia-
tion compared to the analytic approach (fig. 9) which
decreases more and more down to resolution 7.5
◦
(fig.
13). This explains the high deviations in standard de-
viations and correlation coefficients in particular for
sector sizes 60
◦
and 30
◦
.
Mixed Gaussian Distributions.
Due to larger uncertainties of the orientations of
robot and human we assume the input signals to
be a mixture of two Gaussian distributions with the
following parameters:
¯
φ
R1
= 1.779 rad,(102 deg), σ
φ
R1
= 0.02 rad
¯
φ
H1
= 3.698 rad,(212 deg), σ
φ
H1
= 0.02 rad
¯
φ
R2
= 1.762 rad,(101 deg), σ
φ
R2
= 0.03 rad
¯
φ
H2
= 3.716 rad,(213 deg), σ
φ
H2
= 0.03 rad
σ
z
1
1
= 0.1309 rad; σ
z
2
1
= 0.1157 rad
σ
z
1
2
= 0.2274 rad; σ
z
2
2
= 0.1978 rad
Table 1: Standard deviations, fuzzy and non-fuzzy results.
input std 0.02 Gauss, bell shaped (GB) Gauss 0.05 GB
sector size/
◦
60
◦
30
◦
15
◦
7.5
◦
7.5
◦
7.5
◦
non-fuzz σ
z
1
c
0.143 0.140 0.138 0.125 0.144 0.366
fuzz σ
z
1
c
0.220 0.184 0.140 0.126 0.144 0.367
non-fuzz σ
z
1
m
0.160 0.144 0.138 0.126 0.142 0.368
fuzz σ
z
1
m
0.555 0.224 0.061 0.225 0.164 0.381
non-fuzz σ
z
2
c
0.128 0.132 0.123 0.114 0.124 0.303
fuzz σ
z
2
c
0.092 0.087 0.120 0.112 0.122 0.299
non-fuzz σ
z
2
m
0.134 0.120 0.123 0.113 0.129 0.310
fuzz σ
z
2
m
0.599 0.171 0.034 0.154 0.139 0.325
non-fuzz ρ
z
12
c
0.576 0.541 0.588 0.561 0.623 0.669
fuzz ρ
z
12
c
-0.263 0.272 0.478 0.506 0.592 0.592
non-fuzz ρ
z
12
m
0.572 0.459 0.586 0.549 0.660 0.667
fuzz ρ
z
12
m
0.380 0.575 0.990 0.711 0.635 0.592
Figure 5: Sector size: 60
deg.
Figure 6: Sector size: 30
deg.
Figure 7: Sector size: 15
deg.
Figure 8: Sector size: 7.5
deg.
The following computed non-fuzzy and fuzzy (su-
perscript F) and measured numbers (superscript m)
according to (54) show the correctness of the previ-
ous analysis for the analytical case.
¯z
1
= 0.487; ¯z
F
1
= 0.413; ¯z
m
1
= 0.485
¯z
2
= 7.746; ¯z
F
2
= 7.737; ¯z
m
2
= 7.737
σ
z
1
= 0.222; σ
z
1
F
= 0.235; σ
z
1
m
= 0.199
σ
z
2
= 0.184; σ
z
2
F
= 0.184; σ
z
2
m
= 0.178
1.2
1.4
1.6
1.8
2
3.2
3.4
3.6
3.8
4
−5
0
5
10
15
phi
R
phi
H
y
c
x
c
y
cm
x
cm
Figure 9: Control surface non-fuzzy.
Uncertainty and Fuzzy Modeling in Human-robot Navigation
303
1.2
1.4
1.6
1.8
2
3
3.5
4
−20
0
20
40
60
80
100
phi
R
phi
H
x
c
y
c
y
cm
x
cm
Figure 10: Control surface
fuzzy, 60
◦
.
1.2
1.4
1.6
1.8
2
3.2
3.4
3.6
3.8
4
−5
0
5
10
15
20
25
30
phi
R
phi
H
x
c
y
c
y
cm
x
cm
Figure 11: Control surface
fuzzy, 30
◦
.
1.2
1.4
1.6
1.8
2
3.2
3.4
3.6
3.8
4
−5
0
5
10
15
phi
R
phi
H
x
c
y
c
y
cm
x
cm
Figure 12: Control surface
fuzzy, 15
◦
.
1.2
1.4
1.6
1.8
2
3.2
3.4
3.6
3.8
4
−5
0
5
10
15
phi
R
phi
H
x
c
y
c
y
cm
x
cm
Figure 13: Control surface
fuzzy, 7.5
◦
.
Figures 14 and 15 show the regarding input and
output densities where Figs. 16 and 17 depict the scat-
ter diagrams (cuts at certain density levels). Finally it
turns out that the fuzzy approximation is sufficiently
accurate.
Figure 14: Mixed Gaussian,
input.
Figure 15: Mixed Gaussian,
output.
Figure 16: Scatter diagram,
mixed input.
Figure 17: Scatter diagram,
mixed output.
8 CONCLUSIONS
The work presented in this paper is motivated by the
task to predict future situations such as collisions at
specific areas in the presence of robots and humans
and to use this information for feed forward control
actions in the presence of uncertainties. This is essen-
tial for human intentions, actions and reactions that
are difficult to predict and interpret by a robot. We
discussed the problem of intersections of trajectories
in human-robot systems with respect to uncertainties
that are modeled by Gaussian noise on the orienta-
tions of human and robot. This problem is solved by
a transformation from human-robot orientations to in-
tersection coordinates using a geometrical model and
its TS fuzzy version. Based on the input standard de-
viations of the orientations of human and robot, the
output standard deviations of the intersection coordi-
nates are calculated. The analysis was performed un-
der the condition that the nominal position/orientation
of robot and human are constant and known. The
measurements of their orientations are distorted by
Gaussian noise with known parameters. This analy-
sis together with the fuzzy extension also applies to
robots and humans in motion, as long as the positions
of robots and humans can be reliably estimated. We
also extended our method to six inputs and two out-
puts which includes human/robot positions as well.
For the analytical and the fuzzy version of two-input
case the following inverse task can also be solved:
given the standard deviation for the intersection co-
ordinates, find the corresponding input standard devi-
ations for the orientations of robot and human. For
larger standard deviations of the orientation signals
the method is finally extended to mixed Gaussian dis-
tributions. In summary, predicting the accuracy of
human-robot cooperation at a small distance using the
methods presented in this paper increases the system
performance and human safety of human-robot col-
laboration. In future work this method will be used
for robot-human scenarios in factory workshops and
for robots working in difficult environments like res-
cue robots in cooperation with human operators.
ACKNOWLEDGMENT
This research work has been supported by the AIR-
project, Action and Intention Recognition in Human
Interaction with Autonomous Systems.
REFERENCES
Banelli, P. (2013). Non-linear transformations of gaussians
and gaussian-mixtures with implications on estima-
tion and information theory. IEEE Trans. on Infor-
mation Theory.
Bruce, J., Wawer, J., and Vaughan, R. (2015). Human-robot
rendezvous by co-operative trajectory signals. pages
1–2.
Firl, J. (2014). Probabilistic maneuver recognition in traffic
scenarios. Doctoral dissertation, KIT Karlsruhe,.
FCTA 2019 - 11th International Conference on Fuzzy Computation Theory and Applications
304

Fraichard, T., Paulin, R., and Reignier, P. (2014). Human-
robot motion: Taking attention into account . Re-
search Report, RR-8487.
H.Hellendoorn and R.Palm (1994). Fuzzy system technolo-
gies at siemens r and d. Fuzzy Sets and Systens 63
(3),1994, pages 245–259.
J.Chen, Wang, C., and Chou, C. (2018). Multiple tar-
get tracking in occlusion area with interacting ob-
ject models in urban environments. Robotics and Au-
tonomous Systems, Volume 103, May 2018, pages 68–
82.
J.Schaefer and K.Strimmer (2005). A shrinkage to large
scale covariance matrix estimation and implications
for functional genomics. Statistical Applications in
Genetics and molecular Biology, vol. 4, iss. 1, Art. 32.
Kassner, M., W.Patera, and Bulling, A. (2014). Pupil: an
open source platform for pervasive eye tracking and
mobile gaze-based interaction. In Proceedings of the
2014 ACM international joint conference on pervasive
and ubiquitous computing, pages 1151—1160. ACM.
Khatib, O. (1985). Real-time 0bstacle avoidance for ma-
nipulators and mobile robots. IEEE Int. Conf. On
Robotics and Automation,St. Loius,Missouri, 1985,
page 500-505.
L.Foulloy and S.Galichet (2003). Fuzzy control with fuzzy
inputs. IEEE Trans. Fuzzy Systems, 11 (4), pages 437–
449.
O.H.Hamid and N.L.Smith (2017). Automation, per se, is
not job elimination: How artificial intelligence for-
wards cooperative human-machine coexistence. In
Proceedings IEEE 15th International Conference on
Industrial Informatics (INDIN), pages 899–904, Em-
den, Germany. IEEE.
Palm, R., Chadalavada, R., and Lilienthal, A. (2016).
Fuzzy modeling and control for intention recognition
in human-robot systems. In 7. IJCCI (FCTA) 2016:
Porto, Portugal.
Palm, R. and Iliev, B. (2006). Learning of grasp behaviors
for an artificial hand by time clustering and takagi-
sugeno modeling. In Proceedings FUZZ-IEEE 2006
- IEEE International Conference on Fuzzy Systems,
Vancouver, BC, Canada. IEEE.
Palm, R. and Iliev, B. (2007). Segmentation and recognition
of human grasps for programming-by-demonstration
using time clustering and takagi-sugeno modeling. In
Proceedings FUZZ-IEEE 2007 - IEEE International
Conference on Fuzzy Systems, London, UK. IEEE.
Palm, R. and Lilienthal, A. (2018). Fuzzy logic and control
in human-robot systems: geometrical and kinematic
considerations. In WCCI 2018: 2018 IEEE Inter-
national Conference on Fuzzy Systems (FUZZ-IEEE),
pages 827–834. IEEE, IEEE.
Pota, M., M.Esposito, and Pietro, G. D. (2011). Trans-
formation of probability distribution into a fuzzy set
interpretable with likelihood view. In IEEE 11th In-
ternational Conf. on Hybrid Intelligent Systems (HIS
2011), pages 91–96, Malacca Malaysia. IEEE.
Robertsson, L., Iliev, B., Palm, R., and Wide, P. (2007).
Perception modeling for human-like artificial sensor
systems. International Journal of Human-Computer
Studies 65 (5), pages 446–459.
R.Palm and Driankov, D. (1993). Tuning of scaling fac-
tors in fuzzy controllers using correlation functions.
In Proceedings FUZZ-IEEE’93, San Francisco, cali-
fornia. IEEE, IEEE.
R.Palm and Driankov, D. (1994). Fuzzy inputs. Fuzzy Sets
and Systems - Special issue on modern fuzzy control,
pages 315–335.
Tahboub, K. A. (2006). Intelligent human-machine interac-
tion based on dynamic bayesian networks probabilis-
tic intention recognition. Journal of Intelligent and
Robotic Systems., Volume 45, Issue 1:31–52.
W.Luo, J.Xing, Milan, A., Zhang, X., Liu, W., Zhao, X.,
and Kim, T. (2014). Multiple object tracking: A liter-
ature review. Computer Vision and Pattern Recogni-
tion, arXiv 1409,7618, page 1-18.
Yager, R. and Filev, D. B. (1994). Reasoning with proba-
bilistic inputs. In Proceedings of the Joint Conference
of NAFIPS, IFIS and NASA, pages 352–356, San An-
tonio. NAFIPS.
Uncertainty and Fuzzy Modeling in Human-robot Navigation
305
