
Vision based Indoor Obstacle Avoidance using a
Deep Convolutional Neural Network
Mohammad O. Khan and Gary B. Parker
*
Department of Computer Science, Connecticut College, New London, CT, U.S.A.
Keywords: Deep Learning, Artificial Neural Networks, Obstacle Avoidance, Indoor, TurtleBot, Mobile Robotics.
Abstract: A robust obstacle avoidance control program was developed for a mobile robot in the context of tight, dynamic
indoor environments. Deep Learning was applied in order to produce a refined classifier for decision making.
The network was trained on low quality raw RGB images. A fine-tuning approach was taken in order to
leverage pre-learned parameters from another network and to speed up learning time. The robot successfully
learned to avoid obstacles as it drove autonomously in a tight classroom/laboratory setting.
1 INTRODUCTION
The field of Deep Learning consists of algorithms that
learn using massive artificial neural network
architectures. Most Deep Learning models are built
with the intent of processing images. Some of these
architectures are capable of outperforming humans in
tasks like classifying objects, which simply means
differentiating one object from other objects (dog vs.
wolf, e.g.). In this paper, we present an application of
Deep Learning to the concept of autonomous driving
for a TurtleBot type robot within a tight
classroom/laboratory setting based strictly on images.
The robot was able to successfully and autonomously
drive without hitting obstacles within the
environment.
Krizhevsky, Sutskever, and Hinton (2012) put
forth a foundational paper in regards to Deep
Learning. They developed a neural network with 60
million parameters and 650,000 neurons. This
network had 5 convolutional layers along with a few
pooling layers and 3 fully connected layers including
a final output layer of 1000 outputs. At the time, they
achieved a top-5 classification (of the 1000 classes)
error rate of only 15.3% compared to a much higher
second-place error rate of 26.2%. This paper
contributed to the discussion of the importance of
depth in neural networks by noting that removal of a
single hidden layer dropped the top-1 classification
error rate by 2%.
*
http://cs.conncoll.edu/parker
Szegedy et al. (2014) entered the ILSVRC
challenge with a 22 layer deep network nicknamed
GoogLeNet – in part because most of the engineers
and research scientists on the team worked for Google
at the time. The team won the competition with 12
times fewer parameters than Krizhevsky’s deep
network and obtained an impressive 6.66% error rate
for top-5 classification. Following the pattern of
improvements, He, Zhang, Ren, and Sun (2015) of
Microsoft Research used a 19 layer deep neural
network for the task and obtained an accuracy of
4.94% for top-5 classification. This was a landmark
accomplishment as it is purported to be the first to
beat human level performance (5.1%) for the
ImageNet dataset.
The most relevant dataset to our research is that of
CIFAR10 from the Canadian Institute for Advanced
Research (Krizhevsky, 2009b). Alex Krizhevsky
outlined the use of this dataset when he developed it
in 2009 for his Master’s Thesis during his time at the
University of Toronto (2009a). Prior to this, tiny
images on the scale of 32 x 32 were not easily labeled
for classification tasks in regards to algorithms like
Deep Learning. The CIFAR10 dataset includes 10
different classes: airplane, automobile, bird, cat, deer,
dog, frog, horse, ship, and truck. The classes are set
up in a way to be mutually exclusive. For example,
automobile and truck are completely different
categories. Krizhevsky developed different deep
neural network models in 2010 to run training with
the dataset. At the time he obtained the highest
Khan, M. and Parker, G.
Vision based Indoor Obstacle Avoidance using a Deep Convolutional Neural Network.
DOI: 10.5220/0008165104030411
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 403-411
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
403

accuracy using this dataset as his best model
classified objects correctly with a success rate of
78.9% (Krizhevsky, 2010). Since then, Mishkin and
Matas (2016) have obtained 94.16% accuracy on the
CIFAR10 dataset. Whereas, Springenberg et al.
(2015) have obtained 95.59% accuracy and the
current best performance is by Graham (2014) with
an accuracy of 96.53% using max pooling.
There has been strong interest in using the
TurtleBot platform for obstacle detection and
avoidance. Boucher (2012) used the Point Cloud
Library and depth information along with plane
detection algorithms to build methods of obstacle
avoidance. High curvature edge detection was used to
locate boundaries between the ground and objects that
rest on the ground. Other researchers have considered
the use of Deep Learning for the purpose of obstacle
avoidance using the TurtleBot platform.
Tai, Li, and Liu (2016) used depth images as the
only input into the deep network for training
purposes. They discretized control commands with
outputs such as: “go-straightforward”, “turning-half-
right”, “turning-full-right”, etc. The depth image was
from a Kinect camera with dimensions of 640 x 480.
This image was downsampled to 160 x 120. Three
stages of processing were done where the layering
was ordered as such: convolution, activation, pooling.
The first convolution layer used 32 convolution
kernels, each of size 5 x 5. The final layer included a
fully-connected layer with outputs for each
discretized movement decision. In all trials, the robot
never collided with obstacles, and the accuracy
obtained after training in relation to the testing set was
80.2%. Their network was trained only on 1104 depth
images. The environment used in this dataset seems
fairly straightforward – meaning that the only
“obstacles” seems to be walls or pillars. The
environment was not dynamic. Tai and Liu (2016)
produced another paper related to the previous paper.
Instead of a real-world environment, this was tested
in a simulated environment provided by the TurtleBot
platform, called Gazebo. Different types of corridor
environments were tested and learned. A
reinforcement learning technique called Q-learning
was paired with the power of Deep Learning. The
robot, once again, used depth images and the training
was done using Caffe. Other deep reinforcement
learning research included real-world evaluation on a
TurtleBot (Tai et al., 2017), using dueling deep
double Q networks trained to learn obstacle
avoidance (Xie et al., 2017), and using a fully
connected NN to map to Q-values for obstacle
avoidance (Wu et al., 2019).
Tai, Li, and Liu (2017) applied Deep Learning
using several convolutional neural network layers to
process depth images in order to learn obstacle
avoidance for a TurtleBot in the real world. This is
very similar to our work, except they used depth
images, the obstacles were just a corridor, and they
train from scratch instead of using transfer learning as
we did.
Our research provides a distinctive approach in
comparison to these works. Research like Boucher’s
does not consider higher level learning, but instead
builds upon advanced expert systems, which can
detect differentials in the ground plane. By focusing
on Deep Learning, our research allows a pattern based
learning approach that is more general and one which
does not need to be explicitly programmed. While Tai
et al. used Deep Learning, their dataset was limited
with just over 1100 images. We built our own dataset
to have over 30,000 images, increasing the size of the
effective dataset by about 28 times. The environment
for our research is more complex than just the flat
surfaces of walls and columns. As in Xie’s work, in
our research the learning was done on a dataset that
was based on raw monocular RGB images. This
opens the door to further research with cameras that
do not have depth. Moreover, the sizes of the images
used in our research were dramatically smaller, which
also opens up the door for faster training and a speed
up in forward propagation. Lastly, similar to a few of
these works, the results of our work were tested in the
real world as opposed to a simulated environment.
2 DEEP LEARNING
Consider a standard feed-forward artificial neural
network that is fully connected between each layer
being used to process a 100 x 100 pixel image. With
3 color channels, we would have 100 x 100 x 3 or
30,000 inputs to our neural network. This is a large
number of inputs for a standard neural network to
process. Deep Learning directly addresses this
limitation.
The convolution layer passes convolution
windows over the image to produce new images that
are smaller. The number of images produced can be
specified by the programmer. Each new image will be
accompanied by a convolution kernel signifying the
weights. Instead of sending all input values from layer
to layer, deep networks are designed to take regions
or subsamples of inputs. For images this means that
instead of sending all pixels in the entire image as
inputs, different neurons will only take regions of the
image as inputs – full connectivity is reduced to local
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
404

connectivity. We take an image and extract local
regions of depth 3 for the color channels along with
their respective pixel values and input them into a
neuron. Supposing that our local receptive fields are
of size 5 x 5, this neuron takes in an input of
dimensions 5 x 5 x 3 for that particular portion of the
3 color channel image. The local receptive fields can
be seen as small windows that slide over our image,
where the number of panes on the window is
predefined. These panes help determine what features
under the window we want to extract, and over time
these features are better refined. The weighted
windows are commonly called kernels. Depending on
the type of kernel, different features of the image may
be highlighted, such as blurring and sharpening. In
this way, networks can develop identification of
complex patterns in datasets just by applying kernel
filters. Deep networks develop these kernels through
training without being explicitly programmed to do
so. The only supervision is from a loss function in the
output layer denoting how close the network’s
prediction was to the actual value of the image.
Through training, these kernels become more fine-
grained to reduce the loss function’s output.
Pooling is applied to each one of the convolution
images. Deep networks are stacked in such a way as
to include many different types of layers. A general
strategy is to follow a convolution layer with a type
of layer called a pooling layer. The convolution layer
is responsible for learning the lower level features of
an image, such as edges. The pooling layer seeks to
detect a higher level understanding of the lower level
features from the convolution layers. Pooling is also
good for building invariance to local translations.
This means that even if the input region is slightly
translated, most of the pooled output values will not
change. By employing max pooling (defined below),
dominant features, or regions with the largest values,
can be extracted and fed into later layers of the
network. Along with this benefit, the image is also
reduced dramatically because it is downsampled in
one of three ways:
1) Max pooling – The maximum pixel value is
chosen out of a rectangular region of pixels.
2) Min pooling – The minimum pixel value is chosen
out of a rectangular region of pixels.
3) Average pooling – The average pixel value is
chosen out of a rectangular region of pixels.
Reducing the size of the image dramatically cuts
down on the amount of processing needed to train the
higher level features of the network. In terms of
processing, the idea is similar to convolution as we
still pass a window over our image.
Convolution and pooling dominate the discussion
about types of network layers. However, there are a
few other types of layers that were used in this
research.
The Rectified Linear Unit (RLU) layer
(Krizhevsky et al., 2012) has recently grown in
popularity. Many researchers consider this over using
the sigmoid activation function. In fact, they were
able to accelerate convergence in their training by a
factor of 6 times in relation to the sigmoid activation
function using this function. This is a fairly
straightforward operation: the function takes a
numerical input X and returns it if it is positive,
otherwise it returns -1 * X. This effectively eliminates
negative inputs and boosts computation time since
complex computations such as exponentiation are not
needed.
The Local Response Normalization layer
(Krizhevsky et al., 2012) imitates biological lateral
inhibition – excited neurons have the capability of
subduing neighbor neurons. A neural “message” is
amplified and focused by this differential in neuron
excitement. These layers allow neuron’s with large
activation values to be much more influential than
other neurons. Following the pattern of feature
recognition in every layer, these layers allow
significant features to “survive” deeper into the
network.
The fully connected layer, which is like any
regular multi-layered perceptron, is generally the
final layer if it’s used in a network. The outputs of the
neurons in this layer are the actual outputs of the
network. Connected to this layer is the loss layer
where the network compares desired outputs to actual
outputs, and the learning is initiated here in terms of
gradient descent updates.
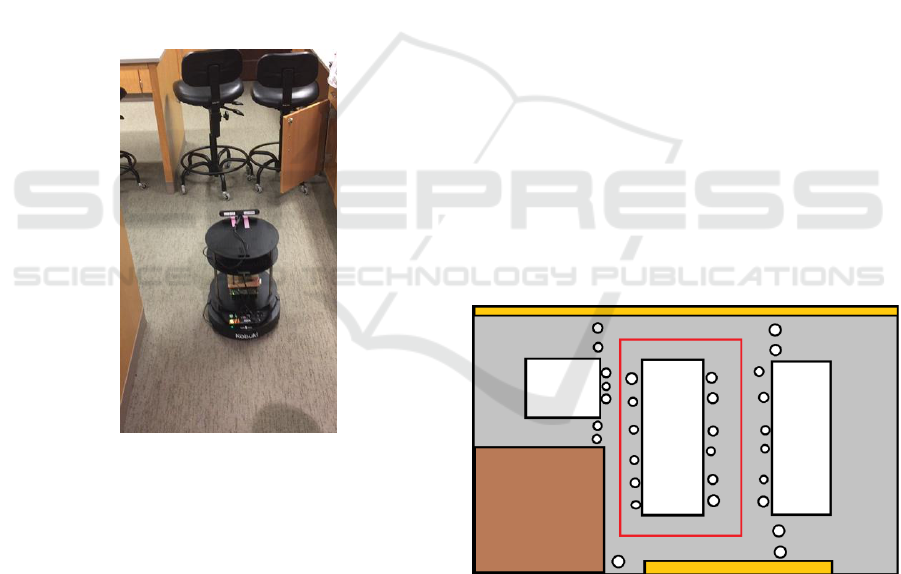
3 THE ROBOT
The robot used for this research (Figure 1) was the
“Deep Learning Robot” from Autonomous. Its basic
functionality is essentially equivalent to that of the
TurtleBot platform. The robot includes an Asus Xtion
Pro 3D Depth Camera, a microphone embedded in the
camera, and a speaker. A Kobuki mobile base allows
it to rotate and move in any direction on the ground
plane. Most importantly, it is equipped with an Nvidia
Tegra TK1, which allows us to carry out Deep
Learning computations on a GPU instead of having to
resort to extremely long wait times for training with a
CPU. This is its main difference from a regular
TurtleBot. While the Tegra TK1 is a powerful mobile
processor, it only has 2GB of memory. This is
Vision based Indoor Obstacle Avoidance using a Deep Convolutional Neural Network
405
problematic for training very deep networks because
holding too many parameters in memory causes the
robot to crash. While training, the robot is unstable
because of this limited memory so running multiple
programs at the same time is to be avoided.
The robot comes equipped with the Deep
Learning frameworks of Google TensorFlow, Torch,
Theano, and Caffe (we used Caffe), and CUDA and
cuDNN are provided for implementing Deep
Learning on GPUs and for speeding up that
computation. This robot is virtually a computer in
itself, and it allows us to treat it as such as it is very
compatible with Ubuntu 14.04. The TurtleBot
framework works hand in hand with the Robot
Operating System (ROS), which is used to control the
robot and to have access to all information coming
from any of the robot’s sensors. ROS is an “open-
source, meta-operating system” which allows
hardware abstraction, low-level control and message
passing between different modules/processes.
Figure 1: Photograph of the Deep Learning Robot.
4 OBSTACLE AVOIDANCE
The problem scenario is that of training a deep neural
network to learn autonomous driving of a vehicle in a
tight, chaotic room/office environment. To test the
functionality and success of the program, the
performance of the robot was compared to the end
goals. The end goals are primarily that the TurtleBot
should autonomously follow an approximately
rectangular path in a tight environment without
colliding into obstacles. A description of this
environment is provided below.
4.1 Environment
The Robotics Lab with obstacles in the room provides
a reasonably complex environment for our tests.
Figure 2 demonstrates this approximate environment
set up. The approximate rectangular path that was
configured was the perimeter of a long lab table. This
table only has 3 planes of support on the underside;
otherwise there are gaps underneath the table. White
rectangles with dark borders are lab tables. The north
and south sides of the tables are solid (2 of the planes
of support), whereas the east and west sides have
gaps. The gap size is large enough for the robot to be
able to drive through, but chairs (white circles with
dark borders) were placed in those locations. The total
radii of the chairs are larger than the circles shown
because the feet of the chairs extend out further.
There is no gap for the robot to move in between
neighbouring chairs (in most cases). The dark brown
rectangle (southwest corner of the lab) is a colony
space – boxed off area of the lab that may be used for
other experiments, but there are borders (one foot
high solid walls) that the robot would need to avoid
hitting. The golden rectangles (north and south walls
of the lab) denote cabinets which the robot must also
avoid. The red rectangle in the middle of the figure
shows the path around the center table that the robot
must follow or the general path it needs to go in on its
way as it avoids chairs, tables, boxes, etc. In separate
runs this path must be completed in both clockwise
and counter clockwise directions.
Figure 2: A visual of the environment with lab tables,
chairs, and cabinets. Images are provided below to help
understand this environment even more. The top of the
drawing is approximately north.
One can see from Figure 3 that the gaps were
closed with moveable round chairs. Each chair has 5
rounded legs and a circular stump. The chair heights
can be adjusted and the orientation can change 360
degrees for both the base and the actual seating.
Sample images are provided in the Figures 1, 3, and
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
406

4 to visualize different possible orientations for the
chairs. These were chosen as the main objects of
interest because they are not solid – there is clearly a
good amount of gap area in between the legs. This
allows for complexity in defining what an obstacle is
and what and obstacle is not. The robot must not
simply learn to follow the color of the carpet because
even the gaps reveal the carpet.
Figure 3: Photograph showing chairs and spacing.
The camera for the robot faces down at about 40
degrees from the vertical position, so it is important
to design an environment that is complex enough, in
terms of objects close to the ground, to be a problem
of interest. To highlight the point of this experiment,
if the environment was built only using cardboard or
other flat material as the main obstacle in the
environment, then there would be a fairly
straightforward solution. There would not be much
variety, apart from lighting conditions, as to what
material needed to be avoided. By using the chairs,
the environment was more natural and complex. Not
only were the chairs not solid surfaces, they were
typically moved by students overnight. While they
might be in the same relative location, the orientations
were completely different each time. This adds
complexity to the problem because it is not easy for a
pattern to be developed since the orientation keeps
changing. This means that for obstacle avoidance to
be successful the deep neural network necessarily
needs to develop an “understanding” that chairs are to
be avoided. With enough gaps in between chairs and
the legs of the chairs having significant gaps, the
robot will still see the carpeted area. Thus, it cannot
just develop a control program to follow a carpeted
area, but instead needs a more complex pattern to be
recognized from the dataset.
Figure 4: The images above demonstrate various obstacle
avoidance scenarios.
It is important to establish guidelines as far as
environmental set up because there may be scenarios
that are impossible for the robot to solve. In our
research, we dealt with two. In the first, if there is
enough of a gap between two chairs the robot may
make the decision to go straight instead of turning
away from the chairs. In the second, if the robot is
facing a cabinet directly head on. Even for a human
with limited peripheral vision, it would be impossible
to know which direction to turn. There is no way to
have metaknowledge about which direction contains
an obstacle and which does not. This is not a fair
scenario to include in the dataset. To solve the former
of the two issues, the environment included chairs
that were placed close enough to have a small enough
gap that the robot would not be able to fit through. To
solve the latter of the two scenarios, cabineted areas
included an open cabinet that swivelled to a direction
the robot was supposed to avoid. Not only does this
Vision based Indoor Obstacle Avoidance using a Deep Convolutional Neural Network
407

add more chaos to the environment (there are various
different items in the cabinets which adds to the
complexity of developing a pattern), but it also
establishes rough guidelines as to the correct path.
Chairs, cabinets, and tables were not the only
obstacles to avoid. A few images in the dataset
included small cardboard boxes. A good amount of
the dataset included the borders of a colony space
environment. It was important to include obstacles
like this in order to confirm that the concept of
obstacle avoidance was being abstracted instead of
the robot only avoiding black colored objects (the
black chairs). It is also significant to note that students
used the lab throughout the day and night, so
conditions of the carpet changed while the dataset
was being developed. For example, coins were found
laid out on the ground near a turn in the path on one
day. On another day, shreds of paper were at different
locations on the path. We decided not to remove some
of these items while building the dataset because it
only adds to the diversity in what we might consider
edge cases.
4.2 Dataset Collection
During data collection the robot was controlled
remotely by a user on a keyboard (connected through
a computer on Bluetooth) as it was driven around the
lab following the path in both directions. The robot
maintained continuous forward movement as the
operator designated left, right, or straight. To increase
the diversity of the dataset, different starting points
were chosen and hard scenarios such as being close
to walls were considered. Overall, 30,754 images
were collected and labelled.
The script processed about 10 images per second,
but not every image was saved. While no time record
was kept, an estimated 1.5 – 2 hours were spent on
trial runs and collections. In the initial testing
conditions, we found that there were edge cases that
were missing, so more data was added over time. By
default, the images from the Asus Xtion Pro are of
dimension 640 x 480. While this would provide a
great amount of detail to train on, it would take an
incredible amount of processing power and time to
train to a significant accuracy. For our deep network
we downsample this image to 64 x 64 (Figure 5).
5 DEVELOPMENT OF DEEP
NEURAL NET ARCHITECTURE
We initially started by using an imitation of Alex
Krizhevsky’s deep network architecture to solve the
CIFAR10 dataset. The plan was to augment this
network with our own dataset. We obtained about
74% accuracy for that dataset. We took the weights
of the network from it having learned the CIFAR10
data, and then fine-tuned it for our own purpose –
obstacle avoidance while driving autonomously.
The thought for fine-tuning was inspired from the
notion that the lower level features detected by the
network are general enough to be applied to the
problem of obstacle detection. Intuitively, there is a
large difference between detecting an airplane and
detecting a dog or a cat. However, Krizhevsky’s
network is capable of differentiating between the two
based on the same kernel weights. That seems to be a
large area of coverage for the type of data provided.
The other thought here was that Krizhevsky’s
network was trained on 32 x 32 dimension images.
Since our images will be 64 x 64 pixels, we may
expect that there will be a boost in accuracy.
The complete network used for this research is
shown in Figure 6. It is split into three lines to
ease the visualization. We can see that there are 3
Figure 5: Reducing the image resolution from 640 x 480 to 64 x 64.
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
408
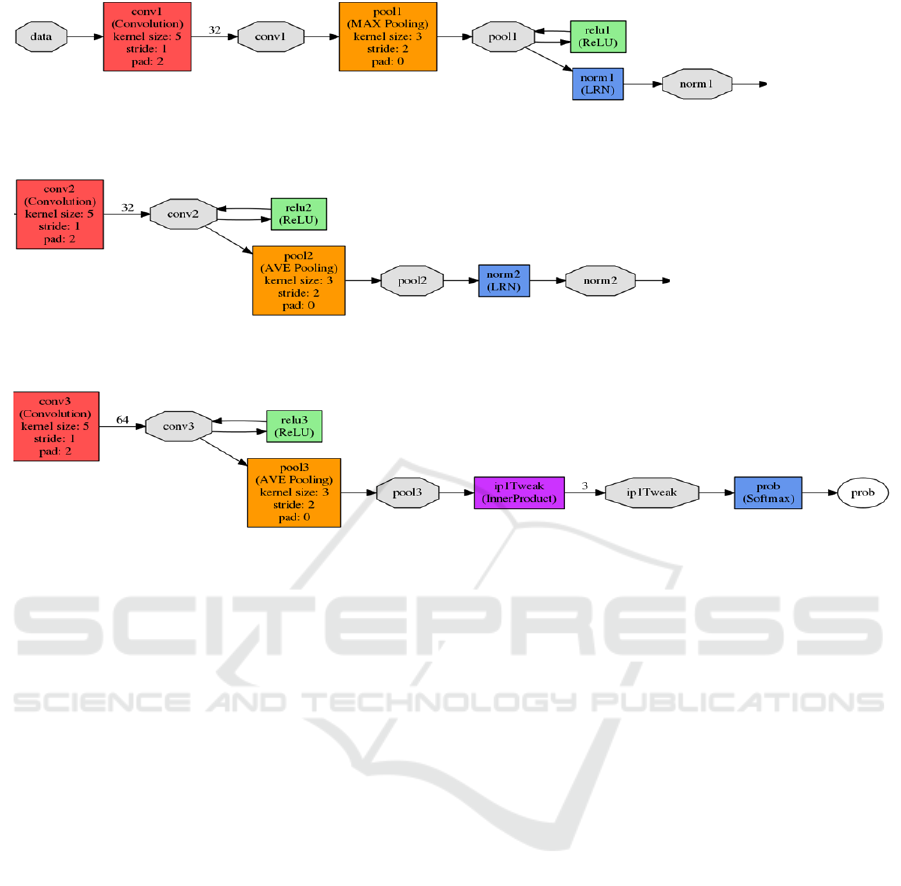
Figure 6: The final architecture for the deep network. This is inspired by the architecture for solving the CIFAR10 dataset.
The rectangles represent layers. The octagons represent data.
iterations of the layer combinations of convolution,
pooling, and normalization. Note that the fine-tuning
of the network is evident from the visual. The layer
“ip1Tweak” is labeled as such because the final layer
of Krizhevsky’s network was removed and replaced
with an inner product (“ip”), or also considered fully
connected, layer that only had 3 outputs. This is
signified by the value 3 above the ip1Tweak layer in
the visual. The 3 outputs correspond to the decision
making of the TurtleBot in terms of autonomous
driving directions. The original network included 32
convolution kernels for the first convolution, 32
convolution kernels for the second convolution, and
64 convolution kernels for the last one. We can also
see how each convolution layer is immediately
followed by a pooling layer. Every convolution layer
also includes a rectified linear unit attached to it.
Local Response Normalization also appears to be an
effective addition to this network, as it augments the
outputs of 2 of the 3 pooling layers. The dataset was
split as such for the final network: 23,065 images for
training and 7,689 images for testing – a 75% training
split of the entire dataset.
The hyperparameters were:
• testing iterations: 100; basically how many
forward passes the test will carry out.
• batch size: 77; this is for batch gradient descent
– notice that batch size * testing iterations will
cover the entire testing dataset.
• base learning rate: 0.001
• momentum: 0.9
• weight decay: 0.004
• learning rate policy: fixed
• maximum training iterations: 15,000
• testing interval: 150; testing will be carried out
every 150 training iterations.
These hyperparameters were determined through
several experiments in order to find the desired level
of accuracy and performance. Some of these
parameters are surely subjective. For example, we
considered testing interval to be much less than it
usually is for large networks (on the order of 1000).
The reason for making this a small value is so that we
can analyze shifts in learning in a decent amount of
time instead of having to wait for over half an hour.
The number of maximum iterations was chosen as an
estimation of the number of epochs the network may
have needed to stabilize. The batch size of the training
data is 77 images, thus we would need about 300
iterations to cover the whole training dataset. Hence,
the number for maximum iterations was established
as 15,000 in order for the network to go through about
50 epochs.
Vision based Indoor Obstacle Avoidance using a Deep Convolutional Neural Network
409

6 RESULTS FOR AUTONOMOUS
DRIVING
Starting with a Krizhevsky network trained on the
CIFAR10 dataset and replacing the final layer with a
tweaked fully connected layer, we ran the Deep
Learning neural network on 30,000 images generated
for the obstacle avoidance problem. The network was
able to obtain an accuracy of about 92% after 15,000
iterations (Figure 7). It took the network about 200
iterations to get to the 84% accuracy mark and around
2000 iterations to achieve an accuracy of 90%. Ten
different test runs in the actual environment were
completed where the robot was reversed after a
completion of a lap in order to complete the lap in the
both directions. The robot did, although rarely,
slightly graze against the leg of a chair or a cardboard
box. However, this did not change the trajectory of
the robot and it was still able to complete its course.
For this reason, these rare occurrences were not
considered as major events for hitting an obstacle.
One could argue that the turning angle for the
robot is the only issue here since this is such a tight
environment. Though the network made the right
decision, the movement of the physical robot may
have been slightly too much. This can be corrected
with very small tweaks in the values of turning radii
for the different decisions, however this does not
reflect on or add to the discussion about the
performance of the deep network in itself.
Figure 7: The performance of the network in relation to
iterations for the fine-tuned Krizhevsky network trained
with over 30,000 images. The first 15,000 iterations are
shown. It took about 200 iterations to get to the 84% mark
and by 15,000 it was at 92% accuracy.
6.1 Visual Analysis of Results
While observing the robot during particular situations
of interest we noted that it routinely performed the
correct action. The scenario of the open cabinet was
not a challenge for the robot (Figure 1 and Figure 4
top left). As previously mentioned, this helped
augment the robots path learning. We observed that
the robot was successfully able to navigate the tight
corridor and move away from chair obstacles (Figure
4 top images) and the border of the colony space,
which showed that the robot learned to avoid more
than just the chairs (Figure 4 right images). Although,
the cardboard box was seldom included in the original
training dataset, the robot clearly had pattern
recognition broad enough to be able to avoid it
(Figure 4 bottom left). Figure 8 shows three examples
of the output of the neural network.
left 0, straight 0, right 1
left 0.73, straight 0.27, right 0
left 0.02, straight 0.96, right 0.02
Figure 8: A sampling of scenarios where the neural network
made live decisions and the outputs of the NN are shown
for each (they will total 1.0). The NN will have the robot
turn right in the top scenario, left in the middle, and straight
in the bottom.
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
410

7 CONCLUSIONS
The approach of fine-tuning Krizhevsky’s network
that solved the CIFAR10 dataset was highly
successful. The robot effectively avoided obstacles in
the original room where the dataset was collected.
The robot also avoided colliding into other obstacles
that were not part of the dataset – the deep network
did not solely focus on chairs and cabinets as the only
obstacles to avoid. In regard to accuracy, this
approach seems more successful than the previous
approaches that utilized depth. In the future, different
dimensions (other than 64x64) may be considered. It
would be valuable to potentially find a definable
relationship between the image dimension and
network accuracy.
REFERENCES
Boucher, S., 2012. Obstacle detection and avoidance using
TurtleBot platform and Xbox Kinect. Research
Assistantship Report. Department of Computer
Science, Rochester Institute of Technology.
Graham, B., 2014. Fractional max-pooling. CoRR,
arXiv:1412.6071.
He, K. , Zhang, X., Ren, S. & Sun, J., 2015. Delving deep
into rectifiers: Surpassing human level performance on
imagenet classification. Proceedings of the
International Conference on Computer Vision.
Krizhevsky, A., 2009a. Learning multiple layers of features
from tiny images. Master’s thesis, Department of
Computer Science, University of Toronto.
Krizhevsky, A., 2009b. CIFAR10 dataset project page:
https://www.cs.toronto.edu/~kriz/cifar.html
Krizhevsky, A., 2010. Convolutional deep belief networks
on CIFAR-10. Unpublished manuscript.
Krizhevsky, A, Sutskever, I. & Hinton, G., 2012. ImageNet
classification with deep convolutional neural networks.
Neural Information Processing Systems (NIPS).
Mishkin, D. & Matas, J., 2016. All you need is a good init.
Proceedings of the International Conference on
Learning Representations (ICLR).
Springenberg, J.T., Dosovitskiy, A., Brox, T., Riedmiller,
M., 2015. Striving for simplicity: the all convolutional
net. Proceedings of the International Conference on
Learning Representations (ICLR).
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke,V., and
Rabinovich, A., 2014. Going deeper with convolutions.
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Tai, L., Li, S. & Liu, M., 2016. A deep-network solution
towards modeless obstacle avoidance. Proceedings of
the IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS).
Tai, L. & Liu, M., 2016. A robot exploration strategy based
on q-learning network. Proceedings of the IEEE
International Conference on Real-time Computing and
Robotics (RCAR).
Tai, L., Li, S., Liu, M. 2017. Autonomous exploration of
mobile robots through deep neural networks.
International Journal of Advanced Robotic Systems.
Tai, L., Paolo, G., & Liu, M. 2017. Virtual-to-real deep
reinforcement learning: continuous control of mobile
robots for mapless navigation. Proceedings of the
IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS 2017).
Wu, K., Esfahani, M., Yuan, S., & Wang, H. 2019. Depth-
based obstacle avoidance through deep reinforcement
learning. Proceedings of the 5th International
Conference on Mechatronics and Robotics.
Xie, L., Wang, S., Markham, A., & Trigoni, N. 2017.
Towards monocular vision based obstacle avoidance
through deep reinforcement learning. Proceedings of
the RSS 2017 Workshop on New Frontiers for Deep
Learning in Robotics.
Vision based Indoor Obstacle Avoidance using a Deep Convolutional Neural Network
411
