
Learning Method of Recurrent Spiking Neural Networks to Realize
Various Firing Patterns using Particle Swarm Optimization
Yasuaki Kuroe
1,2
, Hitoshi Iima
2
and Yutaka Maeda
1
1
Faculty of Engineering Science, Kansai University, Suita-shi, Osaka, Japan
2
Faculty of Information and Human Sciences, Kyoto Institute of Technology, Kyoto, Japan
Keywords:
Spiking Neural Network, Learning Method, Particle Swarm Optimization, Burst Firing, Periodic Firing.
Abstract:
Recently it has been reported that artificial spiking neural networks (SNNs) are computationally more pow-
erful than the conventional neural networks. In biological neural networks of living organisms, various firing
patterns of nerve cells have been observed, typical examples of which are burst firings and periodic firings. In
this paper we propose a learning method which can realize various firing patterns for recurrent SNNs (RSSNs).
We have already proposed learning methods of RSNNs in which the learning problem is formulated such that
the number of spikes emitted by a neuron and their firing instants coincide with given desired ones. In this
paper, in addition to that, we consider several desired properties of a target RSNN and proposes cost func-
tions for realizing them. Since the proposed cost functions are not differentiable with respect to the learning
parameters, we propose a learning method based on the particle swarm optimization.
1 INTRODUCTION
Recently there is a surge in the research of artifi-
cial spiking neural networks (SNNs) due to the fact
that the functions of spiking neurons are closer to
the physiological functions of the generic biologi-
cal neurons than the conventional threshold and sig-
moidal neurons (Mass and Bishop C., 1998; Gerst-
ner and van Hemmen, 1993b; Mass, 1997b). In arti-
ficial spiking neural networks the information is en-
coded and processed by the spike trains (sequence of
action potentials) similar to the biological neural net-
works (BNNs), through a discontinuous and nonlin-
ear encoding mechanism (Mass and Bishop C., 1998;
Gerstner and van Hemmen, 1993b). The conventional
neuron models usually tend to ignore these sophisti-
cated discontinuous encoding mechanisms. In addi-
tion to the SNNs’ similarity to the BNNs, recently it
has been reported that they are computationally more
powerful than the conventional artificial neural net-
works (Mass, 1997b; Mass, 1997a; Mass, 1996). It
is however much more difficult to analyze and syn-
thesize the SNNs than the conventional threshold and
sigmoidal neural networks. This is due to their as-
sociated nonlinear and discontinuous encoding mech-
anisms, which make the SNNs continuous and dis-
crete hybrid-dynamical systems. In this paper we dis-
cuss a learning method, which is one of fundamental
problems of NNs, for the recurrent spiking neural net-
works (RSNNs).
In the case of the sigmoidal neural networks, the
backpropagation method was proposed by Rumelhart
et al. (Rumelhart and McClelland, 1986) for feed-
forward types of neural networks, which is one of
the pioneering works that trigger the research inter-
ests of applications of the neural networks. Following
the backpropagation method, learning methods have
been developed for recurrent sigmoidal neural net-
works (Kuroe, 1992).
In the case of the SNNs, their learning methods
have not been actively studied due to their associ-
ated nonlinear and discontinuous encoding mecha-
nisms and only a few studies have been done. As
unsupervised learning W. Gestner et al. proposed
a learning method for feedforward SNNs, which is
based on the concept of the Hebbian learning (Gerst-
ner and van Hemmen, 1993a). As supervised learning
for SNNs the following studies have been done. K.
Selvaratnam et al. proposed a gradient based learn-
ing method for RSNNs (Selvaratnam and Mori, 2000)
based on sensitivity equation approach and Y. Kuroe
et al. proposed based on adjoint equation approach
(Kuroe and Ueyama, 2010). Backpropagation-like
learning method is proposed for feedforward SNNs
(Bohte et al., 2002) and for deep SNNs (Lee and
Pfeiffer, 2016).
Kuroe, Y., Iima, H. and Maeda, Y.
Learning Method of Recurrent Spiking Neural Networks to Realize Various Firing Patterns using Particle Swarm Optimization.
DOI: 10.5220/0008164704790486
In Proceedings of the 11th International Joint Conference on Computational Intelligence (IJCCI 2019), pages 479-486
ISBN: 978-989-758-384-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
479
s+c
i
e
i
p
i
1
σ
i
p
i
σ
i
t
t
t
Membrane
Potential
Spike
Train
reset
e
i
Trigger
Summed
Potential
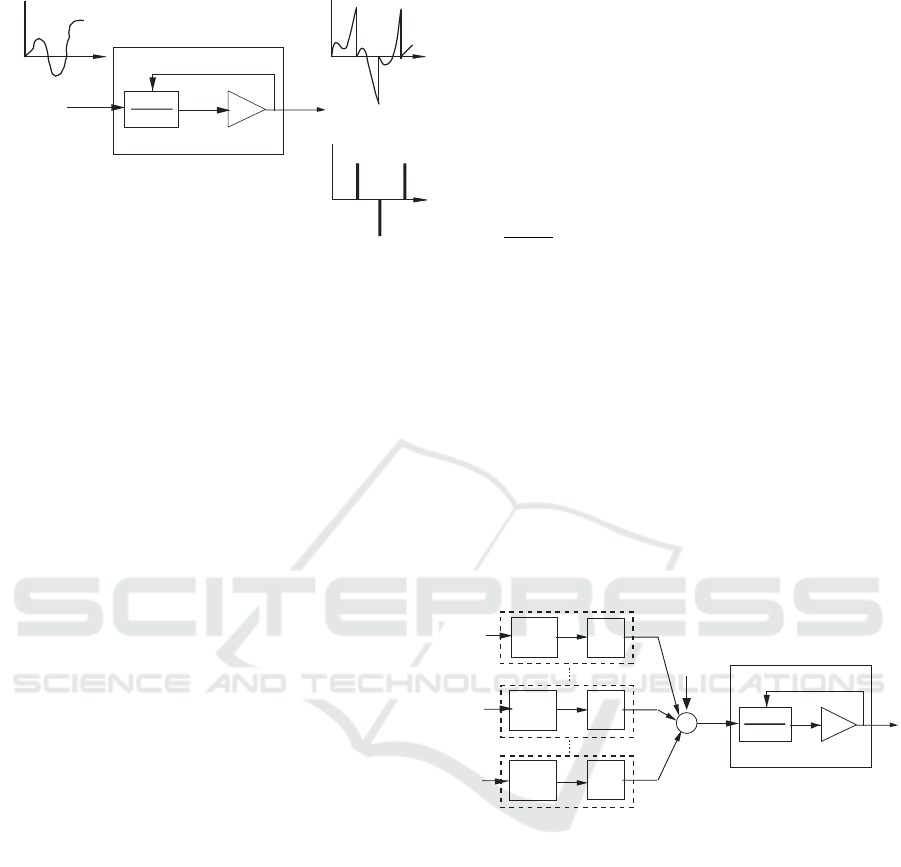
Figure 1: Schematic of the firing mechanism of the integrate
and fire type SN.
In biological neural networks of living organisms,
various firing patterns of nerve cells have been ob-
served (Izhikevich, 2007), typical examples of which
are burst firings and periodic firings. It is expected
that artificial SNNs with recurrent architectures re-
alize various complicated firing patterns (Izhikevich,
2004; Izhikevich, 2007) because of their behavior as
nonlinear dynamical systems. In this paper we pro-
pose a learning method which can realize various fir-
ing patterns for RSNNs. As stated above learning
methods of RSNNs were proposed in (Selvaratnam
and Mori, 2000; Kuroe and Ueyama, 2010), in which
the learning problem is formulated such that the num-
ber of spikes emitted by a neuron and their firing in-
stants coincide with given desired ones. In addition to
that, in this paper we consider several desired prop-
erties of a target RSNN and propose cost functions
for realizing them. Since the proposed cost functions
are not differentiable with respect to the learning pa-
rameters and their gradients do not exist, the gradient
based methods cannot be used. We propose a learn-
ing method based on the particle swarm optimization
(PSO)(Kennedy and Eberhart, 2001).
2 SPIKING NEURAL NETWORKS
2.1 Firing Mechanism of SNs
In this paper we consider the integrate-and-fire type
spiking neurons (SNs) shown in Fig. 1. The firing
mechanism of the i-th integrate-and-fire type spik-
ing neuron is as follows. When an input stimulus
e
i
(t) is fed into the integrator with transfer function
1/(s + c
i
), a spike is emitted at the moment when the
internal state p
i
(t) which corresponds to the mem-
brane potential of a biological neuron reaches the
threshold value s
i
. At the instant of spike emission
the sign of the internal state p
i
(t) is observed and as-
signed to the output spike and the internal state p
i
(t)is
reset to zero. The firing mechanism is mathematically
described as follows.
σ
i
(t) =
K
i
∑
k
i
=1
ε
i,k
i
× δ(t − t
i,k
i
) (1)
t
i,k
i
= min[t : t > t
i,k
i
−1
,|p
i
(t)| ≥ s
i
] (2)
ε
i,k
i
= sgn[p
i
(t
−
i,k
i
)] (3)
d p
i
(t)
dt
= −c
i
p
i
(t) + e
i
(t), t
i,k
i
−1
< t < t
i,k
i
(4)
p
i
(0) = p
0
i
, (5)
p
i
(t
+
i,k
i
) = 0, k
i
= 1, .. .K
i
, (6)
where, σ
i
(t): output sequence of spikes of the i-
th spiking neuron, K
i
: total number of spikes fired
before time t, t
i,k
i
: time at which the k
th
i
spike is
emitted, p
i
(t): internal state, p
0
i
: initial condition of
p
i
(t), s
i
: threshold value, e
i
(t): input to the spiking
neuron, and p
i
(t
−
i,k
i
) = lim
ε→0
p
i
(t
i,k
i
− ε), p
i
(t
+
i,k
i
) =
lim
ε→0
p
i
(t
i,k
i
+ε), ε > 0. Equation (6) denotes the re-
setting mechanism of the SN at spike emission times.
2.2 Model of Spiking Neural Networks
e
i
p
i
σ
i
reset
s+c
i
1
v
i
+
+
+
+
w
i,1
w
i,j
w
i,M
u
i,1
u
i,j
u
i,M
g
i,M(s)
y
i,1
y
i,j
y
i,M
g
i,1(s)
g
i,j(s)
Trigger
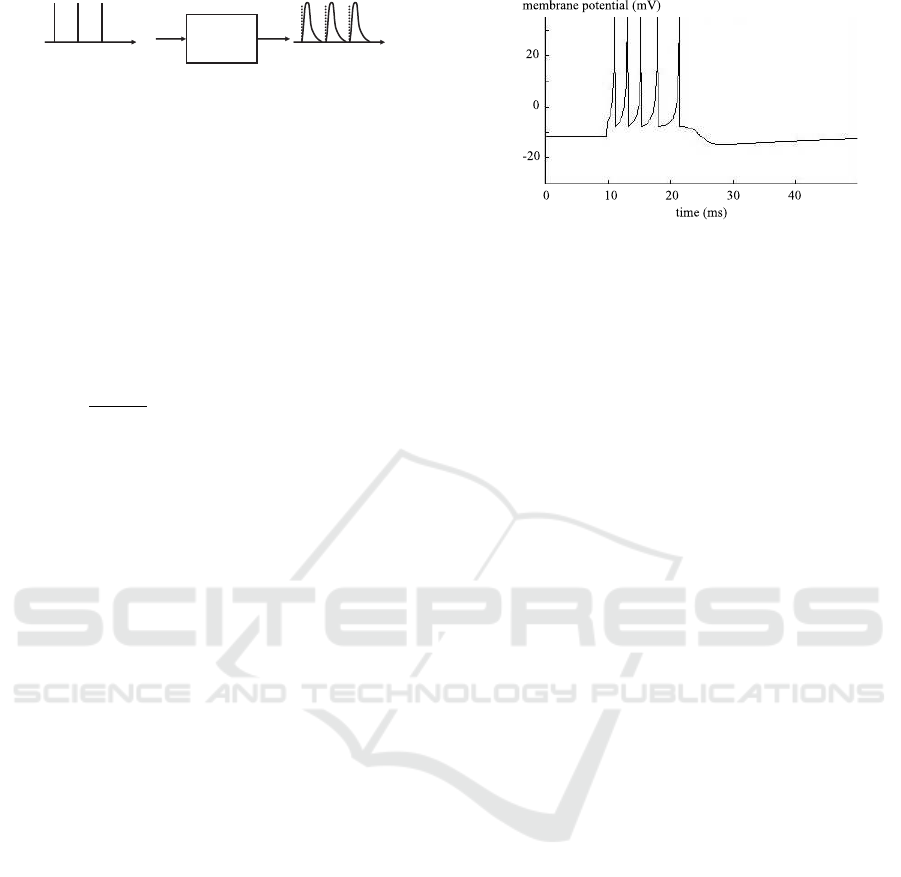
Figure 2: Model of the connections of i-th spiking neuron
in the SNN.
In this paper we consider recurrent spiking neural
networks (RSNNs) in which integrate-and-fire type
spiking neurons shown in Fig.1 are fully connected
through synaptic weights w
i, j
and time delay elements
g
i, j
(s). Figure 2 shows a schematic diagram of the
connection of the ith spiking neuron in the RSNN.
We let here the number of neurons composed in the
RSNN be M. The elements g
i, j
(s) determine shape
of post synaptic potentials, so called spike-response
function as shown in Fig. 3, or delay due to the
spike transmission between spiking neurons. Synap-
tic weights w
i, j
are multiplied by the time delay ele-
ments (w
i, j
× g
i, j
(s)). The input stimulus e
i
(t) of the
i-th SN is generated by the weighted sum of each out-
put y
i, j
(t) of the element g
i, j
(s) and the external input
v
i
(t). The input u
i, j
(t) of g
i, j
(s) is connected with
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
480
)(s
i,j
g
t
)(
,
ty
ji
t
)(
,
tu
ji
Figure 3: Spikes and spike-response function.
the output of the j-th neuron σ
j
(t). The connection
topology of the entire RSNN is given by
e
i
(t) =
M
∑
j=1
w
i, j
y
i, j
(t) + v
i
(t), (7)
u
i, j
(t) = σ
j
(t). (8)
For the convenience of the derivation of the learning
algorithms, the elements g
i, j
(s) are expressed in the
state space form:
dx
i, j
(t)
dt
= A
i, j
x
i, j
(t) + b
i, j
u
i, j
(t) (9)
y
i, j
(t) = c
i, j
x
i, j
(t) (10)
x
i, j
(0) = x
0
i, j
, i, j = 1,··· ,M (11)
g
i, j
(s) = c
i, j
(sI − A
i, j
)
−1
b
i, j
,
where x
i, j
(t): N dimensional state vector, x
0
i, j
: N di-
mensional initial state vector and the dimensions of
the system matrices and vectors A
i, j
, b
i, j
and c
i, j
are
N × N, N × 1 and 1 × N, respectively. Equations
(1)∼(11) give the whole description of the RSNN
considered in this paper.
3 PROPOSED METHOD
3.1 Examples of Firing Patterns
In biological neural networks of living organisms,
various firing patterns of nerve cells are observed.
The purpose of this paper is to propose a learning
method of neural network that produces such firing
patterns. Here we introduce two examples of such fir-
ing patterns observed in biological neural networks of
living organisms like human brains. One typical ex-
ample is a burst firing pattern. It is a firing pattern
as shown in Fig. 4, in which the number of firings
suddenly increases and decreases and the firing time
interval and the non-firing time interval are clearly di-
vided. In the figure an example of the time evolution
of the membrane potential of a neuron which gener-
ates burst firing is shown. Another typical example is
a periodic firing pattern. It is a firing pattern in which
a same firing pattern is repeated with a constant pe-
riod. In both firing patterns, burst and periodic firing
patterns, there could exist various firing patterns de-
pending on firing time, firing frequency and so on.
Figure 4: An example of burst firing.
3.2 Formulation of Learning Problems
3.2.1 Learning Problem for Generating Various
Firing Patterns
We now formulate the learning problem which real-
izes various firing patterns. As stated above, in burst
firing patterns the firing time interval and the non-
firing time interval are clearly divided. In order to
realize this, it is necessary to divide total time inter-
val into some sub time intervals and specify a desired
firing pattern to each sub time interval.
Suppose that the RSNN operates starting at time
t = 0 and finishing at time t = t
f
and the total time
interval is 0 ≤ t < t
f
. For each neuron, say the i-th
SN denoted by SN
i
in the RSNN, we divide the total
time interval into sub time intervals and the number
of sub time intervals is denoted by S
i
. For the i-th SN,
let tv
i
-th sub time interval be t
s
i,tv
i
≤ t < t
e
i,tv
i
,(tv
i
=
1,2, ··· ,S
i
), where the start time t
s
i,tv
i
and the finish
time t
e
i,tv
i
satisfy the following equations.
t
e
i,tv
i
= t
s
i,tv
i
+1
(i = 1,2,·· · , M;tv
i
= 1, ·· · , S
i
− 1)
t
s
i,1
= 0, t
e
i,S
i
= t
f
(i = 1,2,·· · , M) (12)
We now formulate the learning problem which re-
alizes various firing patterns. We already pro-
posed a learning method of the RSNNs described by
(1)∼(11), in which the learning problem is formulated
such that the number of spikes emitted by SN and
their firing instants coincide with given desired num-
bers of spikes and their desired firing instants for the
interval [0,t
f
] (Selvaratnam and Mori, 2000; Kuroe
and Ueyama, 2010). In this paper, in order to real-
ize various firing patterns, in addition to the learning
problem in (Selvaratnam and Mori, 2000; Kuroe and
Ueyama, 2010) we consider the learning problems in
which desired number of spikes without specifying
their firing instant is given, and desired values of up-
per and/or lower limit of the number of spikes emitted
by SN are given. The learning problem is formulated
as follows.
Learning Method of Recurrent Spiking Neural Networks to Realize Various Firing Patterns using Particle Swarm Optimization
481

[Learning Problem]
Determine the values of the synaptic weights w
i, j
such
that the RSNN generates the desired spike sequence
if one of the values of the following items is specified
for any given neuron SN
i
in the RSNN and any given
sub time interval t
s
i,tv
i
≤t<t
e
i,tv
i
:
a) the number of spikes and their firing instants,
b) the number of spikes,
c) the value of upper limit of the number of spikes,
d) the value of lower limit of the number of spikes or
e) the values of lower and upper limits of the number
of spikes.
Let the set of the neurons SN
i
which one of the items
a)–e) is specified be O and the set of the indexes
tv
i
of the sub time intervals which one of the items
a)–e) is specified be U
i
. For the sub time interval
t
s
i,tv
i
≤t<t
e
i,tv
i
(tv
i
∈ U
i
), let the number of spikes which
SN
i
emits be K
i,tv
i
, and the time instant of k
i,tv
i
-th
spike be t
i,k
i,t v
i
(k
i,tv
i
= 1, 2,··· ,K
i,tv
i
). We introduce
the measures which represent discrepancies between
K
i,tv
i
, t
i,k
i,t v
i
and their specified values in a)–e) as cost
functions, denoted by J
i,tv
i
(t
i,k
i,t v
i
,K
i,tv
i
), and define
the total cost function as follows.
J
1
=
∑
i∈O
∑
tv
i
∈U
i
α
i,tv
i
J
i,tv
i
(t
i,k
i,t v
i
,K
i,tv
i
) (13)
where α
i,tv
i
are weight coefficients. The def-
inition of J
i,tv
i
will be given in the next sec-
tion. Letting the learning parameters be X
1
=
(w
1,1
,w
1,2
,·· ·,w
i, j
,·· ·,w
M,M
), the learning problem
here is reduced to the following optimization prob-
lem:
Minimize J
1
(14)
w.r.t. X
1
3.2.2 Learning Problem for Generating Periodic
Firing Patterns
In order to make the network generate persistent pe-
riodic phenomena it should be a nonlinear dynamical
system like the RSNNs described by (1)∼(11). Here
we formulate the learning problem which generates
various patterns in the previous subsection and makes
them periodic with a given desired period T . In or-
der to make them periodic, the state variables p
i
and
x
i, j
(t) of the RSNN must satisfy the conditions:
p
i
(t) = p
i
(t + T ), x
i, j
(t) = x
i, j
(t + T ). (15)
The problem here is to determine the values of the
network parameters which minimize the cost func-
tion J
1
and make the conditions (15) being satisfied
simultaneously. We introduce another cost function
to realize the conditions. Note that the initial states
of the RSNN which realize the conditions (15) are
unknown. As the learning parameters we choose
not only the synaptic weights w
i, j
but also the initial
states of the RSNN, p
0
i
and x
0,n
i, j
(i = 1,2,·· · , M; n =
1,2, ··· ,N). Defining X
2
= (w
1,1
,·· ·,w
i, j
,·· ·,w
M,M
,
p
0
1
,·· ·,p
0
i
,·· ·,p
0
M
, x
0,1
1,1
,·· ·,x
0,n
i, j
,·· ·,x
0,N
M,M
), the learning
problem here is reduced to the following optimization
problem:
Minimize J
1
+ βJ
2
(16)
w.r.t. X
2
subject to |p
0
i
| < s
i
J
2
is the cost function realizing the periodicity condi-
tion (15), the definition of which is given in the next
section, and β is a weight coefficient. Note that the
constraint |p
0
i
| < s
i
is set to prevent the fact that SN
i
always fires at the initial time t = 0 if |p
0
i
| ≥ s
i
.
3.3 Defining the Cost Functions
It is known that, since PSO is an optimization method
that uses only values of a cost function and does not
require its continuity or the existence of its gradient,
various cost functions can be set according to opti-
mization problems. It is, therefore, important what
kind of cost functions are set. We now propose cost
functions which realize the items a)–e) and the peri-
odicity condition (15).
3.3.1 Cost Function for Firing Instants
Let the desired number of spikes emitted by SN
i
for
the time interval t
s
i,tv
i
≤t<t
e
i,tv
i
be K
d
i,tv
i
and their de-
sired firing instants be t
d
i,k
i,t v
i
(k
i,tv
i
=1,2,· ·· ,K
d
i,tv
i
). In
order to realize that the number of spikes emitted by
each SN
i
and their firing instants coincide with the
given desired ones, we define the following cost func-
tion J
11
.
J
11
=
K
i,t v
i
∑
k
i,t v
i
=1
|t
d
i,k
i,t v
i
−t
i,k
i,t v
i
|
ex
+ J
111
(17)
where
J
111
=
K
i,t v
i
∑
k
i,t v
i
=K
d
i,t v
i
+1
|t
p
i,k
i,t v
i
−t
i,k
i,t v
i
|
ex
,(K
i,tv
i
> K
d
i,tv
i
)
K
d
i,t v
i
∑
k
i,t v
i
=K
i,t v
i
+1
|t
d
i,k
i,t v
i
−t
i,K
i,t v
i
|
ex
,(K
i,tv
i
< K
d
i,tv
i
)
0, (K
i,tv
i
= K
d
i,tv
i
)
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
482

and ex is the exponentiation parameter which is usu-
ally chosen as ex = 1 or 2. J
111
is a penalty func-
tion which is applied when the number of spikes
emitted by SN
i
does not coincident with the de-
sired one. When K
i,tv
i
> K
d
i,tv
i
, in order to avoid the
excess number of spikes being fired we set provi-
sional teaching signals for the excess spikes. Let
t
p
i,k
i,t v
i
be the timings of the provisional teaching
signals to the firing instants of the excess spikes
t
i,k
i,t v
i
,k
i,tv
i
= K
d
i,tv
i
+ 1,·· · , K
i,tv
i
. We choose values
of t
p
i,k
i,t v
i
to be larger enough than t
f
(t
p
i,k
i,t v
i
>> t
f
).
When K
i,tv
i
< K
d
i,tv
i
, in order to make each SN
i
gen-
erate additional spikes we set the penalty as follows.
Considering that at the firing instant t
i,K
i,t v
i
of the last
actual spike emitted by SN
i
the missing K
d
i,tv
i
− K
i,tv
i
number of spikes fire simultaneously, we set the error
between the last actual firing instant and the desired
firing instants as in the second case of J
111
.
3.3.2 Cost Function for the Upper and Lower
Limits of the Number of Spikes
Let the desired upper and lower limit values of the
number of spikes emitted by SN
i
for the time inter-
val t
s
i,tv
i
≤t<t
e
i,tv
i
be K
du
i,tv
i
and K
dl
i,tv
i
, respectively. The
cost function for the upper limit is set so that its value
increases as the number of spikes emitted by SN
i
ex-
ceeds the upper limit value K
du
i,tv
i
as follows.
J
12
= max(K
i,tv
i
− K
du
i,tv
i
,0)
ex
(18)
The cost function for the lower limit is set so that its
value increases as the number of spikes emitted by
SN
i
lowers the lower limit value K
dl
i,tv
i
as follows.
J
13
= max(K
dl
i,tv
i
− K
i,tv
i
,0)
ex
(19)
3.3.3 Cost Function for Generating Periodic
Firing Patterns
In order to make firing pattern be periodic with period
T , the state variables p
i
(t) and x
i, j
(t) of the RSNN
must satisfy the conditions (15). The cost function J
2
for the problem (16) is set so as to realize the condi-
tions (15) as follows.
J
2
=
N
T
∑
n
T
=1
M
∑
i=1
|p
0
i
− p
i
(n
T
T )|
ex
+
M
∑
j=1
N
∑
n=1
|x
0,n
i, j
− x
n
i, j
(n
T
T )|
ex
(20)
It is theoretically enough to let N
T
= 1, however, we
introduce the parameter N
T
for numerical accuracy.
The items a)–e) in Subsection 3.2.1 can be real-
ized by appropriately choosing from the cost func-
tions J
11
, J
12
, J
13
defined in the above section and
combining them as follows.
a) J
11
b) J
12
+ J
13
(Let K
du
= K
dl
.)
c) J
12
d) J
13
e) J
12
+ J
13
3.4 Learning Method based on the PSO
The cost function J
11
defined by (17) is differen-
tiable with respect to the network parameters X
1
=
(w
1,1
,w
1,2
,·· ·,w
i, j
,·· ·,w
M,M
) if ex = 2, and gradient
based learning methods were proposed in (Selvarat-
nam and Mori, 2000; Kuroe and Ueyama, 2010) for
RSNNs. Since the other cost functions are not dif-
ferentiable, we use the particle swarm optimization
method (PSO) (Kennedy and Eberhart, 2001) in order
to solve the optimization problems (14) and (16). In
the following we explain the outline of the PSO.
Consider an optimization problem of determining
values of N
x
decision variables X = (x
1
,·· ·,x
n
,·· ·,x
N
x
)
which minimize a cost function J(X). In the PSO, a
swarm is prepared and its all member particles are
used for solving the problem. Let P be the num-
ber of the particles (the swarm size), and X
p,k
=
(x
p,k
1
,·· ·,x
p,k
n
,·· ·,x
p,k
N
x
) be the candidate solution of p-
th particle (p = 1, 2,· ·· ,P) at the k-th iteration. The
candidate solution of p-th particle at the next ((k +1)-
th) iteration is determined based on the update equa-
tion of the PSO as follows.
x
p,k+1
n
= x
p,k
n
+ 4x
p,k+1
n
(21)
where
4x
p,k+1
n
= W 4x
p,k
n
+ C
1
rand
1
()
p,k
n
(pbest
p,k
n
− x
p,k
n
)
+ C
2
rand
2
()
p,k
n
(gbest
k
n
− x
p,k
n
) (22)
and the update value 4X
p
= (4x
p
1
,·· ·,4x
p
n
,·· ·,
4x
p
N
x
) is called the velocity vector of the p-th parti-
cle, rand
1
()
p,k
n
,rand
2
()
p,k
n
are uniform random num-
bers in the range from 0 to 1, W is a weight pa-
rameter called the inertia weight, and C
1
and C
2
are
weight parameters called the acceleration coefficients.
pbest
p,k
= (pbest
p,k
1
, ··· ,pbest
p,k
n
, ··· ,pbest
p,k
N
x
)) is
called the personal best which is the best candidate
solution found by the p-th particle until the k-th it-
eration and gbest
k
=(gbest
k
1
,·· · ,gbest
k
n
,·· · ,gbest
k
N
x
) is
called the global best which is the best candidate so-
lution found by all the members of the swarm, and
they are given as: pbest
p,k
n
= x
p,k
∗
n
and gbest
k
n
=
pbest
p
∗
,k
n
where k
∗
= argmin
1≤k
0
≤k
J(X
p,k
0
) and p
∗
=
argmin
1≤p≤P
J(pbest
p,k
).
Learning Method of Recurrent Spiking Neural Networks to Realize Various Firing Patterns using Particle Swarm Optimization
483

4 NUMERICAL EXPERIMENTS
4.1 Problems and Experiment
We prepare the following three learning problems for
experiments and apply the proposed method to them.
Experiment 1
We consider the RSNN consists of fully connected
five neurons SN
i
(i = 1, 2,. ..,5) and one input neu-
ron SN
input
which generates a triggering input v
i
(t)
as shown in Fig. 5. We let the triggering input be
v
i
(t) = δ(0). In this problem the total time inter-
val [0.0,5.0) is divided into two sub time intervals
[0.0,2.5) and [2.5,5.0). The desired firing sequences
shown in Table 1 are given to the RSNN, where it is
trained so as that SN
1
fires the desired numbers of
spikes for each sub time interval and without assign-
ing their firing instants, and SN
2
, SN
3
and SN
4
fire the
desired lower and/or upper limit values of the number
of spikes. SN
5
is not given desired firing sequences.
This experiment is a learning problem in which the
items b), c), d) and e) in 3.2.1 is specified.
Experiment 2
Experiment 2 is a learning problem in which the item
b) in 3.2.1 is specified and burst firings with the de-
sired number of spikes are realized. We consider the
same RSNN as in Experiments 1 shown in Fig. 5.
The time interval [0.0,5.0) is divided into three sub
time intervals [0.0,1.0), [1.0,1.5) and [1.5, 5.0). The
desired firing sequences shown in Table 2 are given to
SN
1
of the RSNN so that it emits a specified desired
number of spikes for the time interval [1.0,1.5) and it
does not fire for the other time intervals [0.0,1.0) and
[1.5,5.0). The experiments are carried out for two
conditions I ( K
d
1,2
= 10) and II ( K
d
1,2
= 20).
Experiment 3
Experiment 4 is a learning problem in which the
item b) in 3.2.1 is specified and a periodic firing
is realized. We consider the RSNN consists of
two neurons SN
i
(i = 1,2) which are mutually con-
nected as shown in Fig. 6 because neural oscilla-
tors are usually realized by using such fully con-
nected two neuron networks. The total time interval
is [0.0,20.0) and it is divided into five sub time inter-
vals [0.0, 4.0),[4.0, 8.0),[8.0, 12.0),[12.0, 16.0) and
[16.0,20.0). The desired firing sequences shown in
Table 3 are given to SN
1
of the RSNN so that it fires a
specified desired number of spikes for each sub time
interval. In addition to that the periodic conditions
(15) are given so that the RSNN generates a periodic
firing pattern with the period T = 20.
In order to solve the problems of the above
experiments it is necessary to choose appropriate
cost functions in the optimization problems (14) and
(16). We choose the following cost functions for each
problem:
Ex. 1: J =
∑
i∈O
∑
tv
i
∈U
i
(J
12
+ J
13
)
Ex. 2-I, II: J =
∑
i∈O
∑
tv
i
∈U
i
(J
12
+ J
13
)
Ex. 3: J =
∑
i∈O
∑
tv
i
∈U
i
(J
12
+ J
13
) + J
2
In the experiments the parameters of the RSNN
are set as follows. For all experiments we choose
c
i
= 0.2, s
i
= 1.0 and the parameters in the state space
model of the elements g
i, j
(s) are: N = 2 and A
i, j
=
−3.0 0.0
0.0 −6.0
, b
i, j
=
1.0
1.0
, c
i, j
= (1.0,−1.0). In
Experiment 1 and 2 the initial states are chosen as
p
0
i
= 0.0, x
0
i, j
=
0.0
0.0
.
For all the experiments the exponentiation param-
eter ex of the cost functions is chosen as ex = 2. For
Experiment 3 the parameter N
T
of the cost function
J
2
is chosen as N
T
= 1 and the weight coefficient γ is
chosen as γ = 25.
For all experiments the parameters of the parti-
cle swarm optimization are chosen as follows. The
parameters of the update equations (21) and (22)
(W,C
1
,C
2
) are chosen:(W,C
1
,C
2
) = (0.7,1.4,1.4),
the number of the particles is P = 100 or P = 200,
the maximum number T
max
of learning iterations is
T
max
= 5000. In each experiment the learning itera-
tion finishes when the number of the learning iteration
reaches T
max
. For each particle the initial values of the
candidate solution and its velocity, w
p,0
i, j
and 4w
p,0
i, j
,
are determined randomly within the range [−10,10].
In Experiment 3 for each particle the initial values of
the candidate solution and its velocity, p
0
i
, 4p
0
i
, x
0,n
i, j
and 4x
0,n
i, j
are determined randomly within the range
[−1,1] by considering the fact that s
i
= 1.0.
Figure 5: Fully connected five neurons SN
i
(i = 1,... , 5) and
one input neuron SN
input
.
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
484
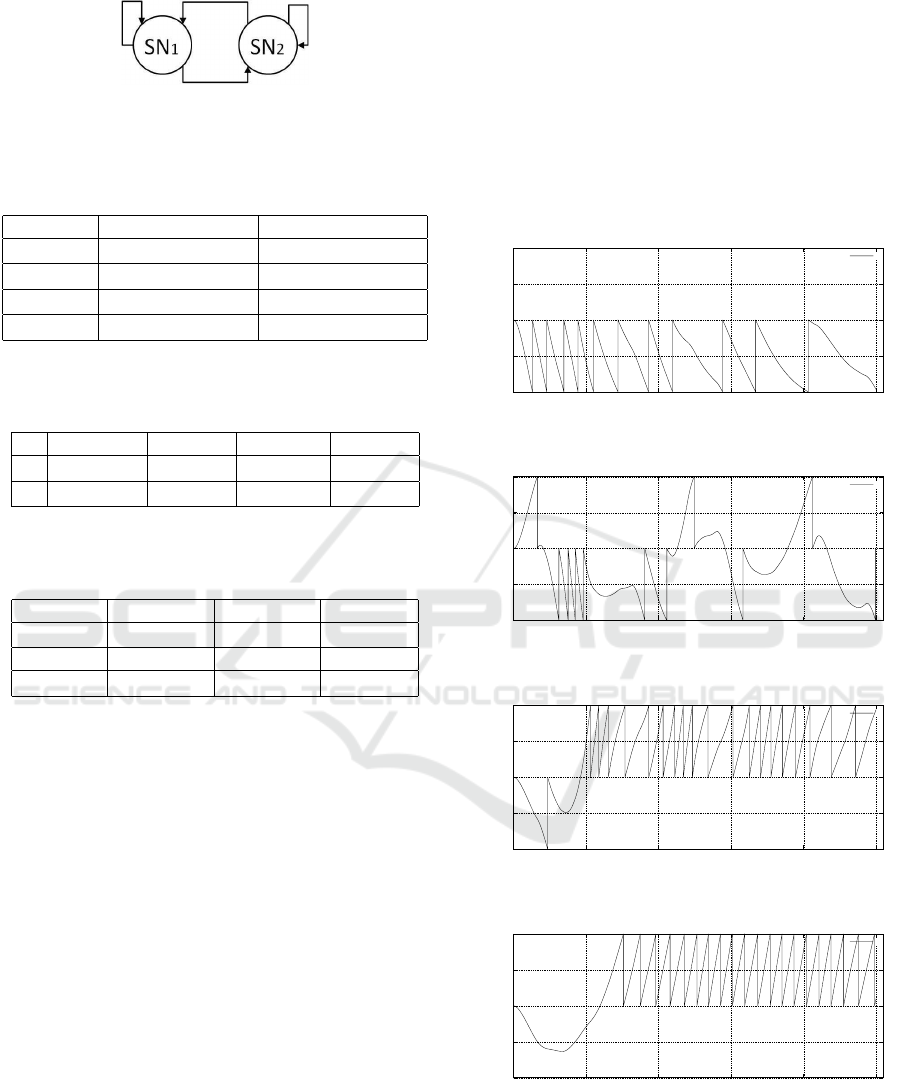
Figure 6: RSNN consists of mutually connected two neu-
rons SN
i
(i = 1, 2).
Table 1: Desired Firing Sequences (Ex. 1).
Ex. 1 (S
1
,S
2
= 2,t
f
= 5.0)
[t
s
i,tv
i
,t
e
i,tv
i
) [0.0,2.5) [2.5,5.0)
SN
1
K
d
1,1
= 8 K
d
1,2
= 3
SN
2
K
dl
2,1
= 8 K
dl
2,2
= 3
SN
3
K
du
3,1
= 10 K
du
3,2
= 10
SN
4
K
dl
4,1
= 10,K
du
4,1
= 5 K
dl
4,2
= 20,K
du
4,2
= 15
Table 2: Desired Firing Sequences (Ex. 2).
Ex. 2 (S
1
= 3,S
2
,·· ·,S
5
= 1,t
f
= 5.0)
[t
s
i,tv
i
, t
e
i,tv
i
) [0.0,1.0) [1.0,1.5) [1.5,5.0)
I SN
1
K
d
1,1
= 0 K
d
1,2
= 10 K
d
1,3
= 0
II SN
1
K
d
1,1
= 0 K
d
1,2
= 20 K
d
1,3
= 0
Table 3: Desired Periodic Firing Sequences (Ex. 3).
Ex. 3 (S
1
= 5,t
f
= 20.0)
[t
s
i,tv
i
,t
e
i,tv
i
) [0.0,4.0) [4.0,8.0) [8.0,12.0)
SN
1
K
d
1,1
= 4 K
d
1,2
= 4 K
d
1,3
= 4
[t
s
i,tv
i
,t
e
i,tv
i
) [12.0,16.0) [16.0,20.0)
SN
1
K
d
1,4
= 4 K
d
1,5
= 4
4.2 Results and Discussions
We applied the proposed learning method to each ex-
periment. The results are shown here.
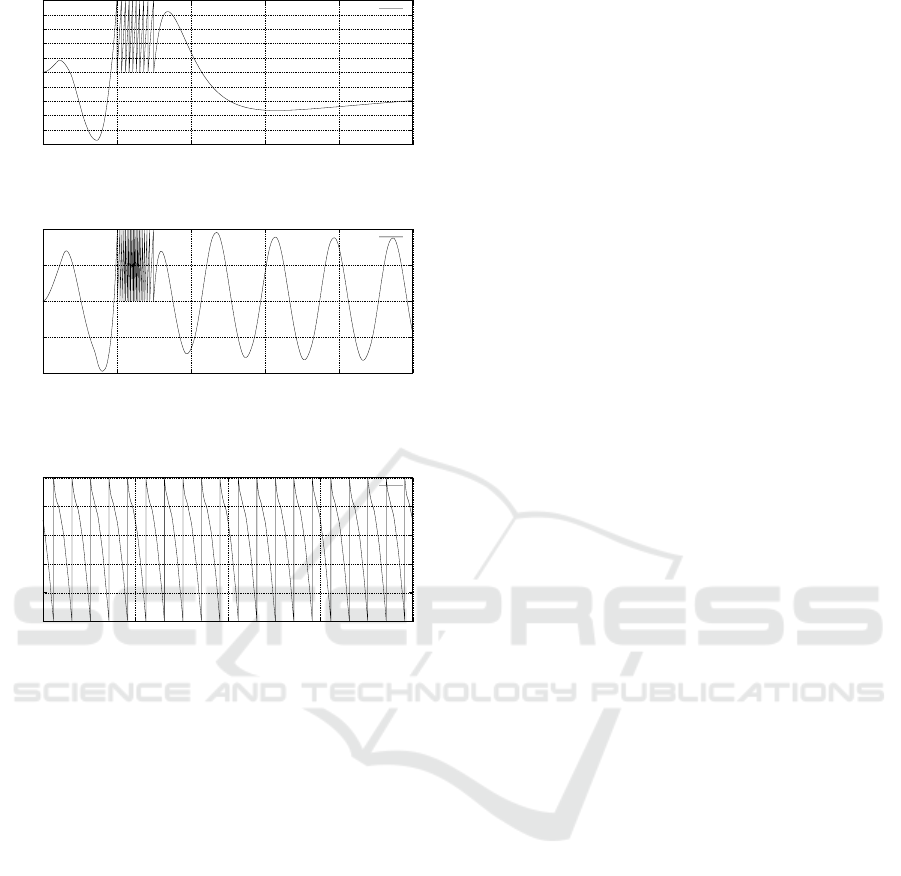
Result of Experiment 1
After training the RSNN shown in Fig. 5 by the pro-
posed method we run it by the same triggering signal
v
i
(t) = δ(0) from the input neuron SN
input
and ob-
serve its behavior. Figures 7, 8, 9 and 10 show ex-
amples of time evolutions of the internal state p
1
(t)
of SN
1
, p
2
(t) of SN
2
, p
3
(t) of SN
3
and p
4
(t) of SN
4
obtained from the result, respectively. It is observed
from the figures that SN
1
, SN
2
, SN
3
and SN
4
emit
the desired firing sequences shown in Table 1, which
implies that the learning is successfully done by the
proposed method.
Result of Experiment 2
Figures 11 and 12 show examples of time evolutions
of the internal state p
1
(t) of SN
1
obtained from the
results Ex. 3-I and Ex. 3-II, respectively. It is ob-
served from the figures the burst firings with the de-
sired number of spikes are realized and the learning is
successfully done by the proposed method.
Result of Experiment 3
After training the RSNN shown in Fig. 6 by the pro-
posed method, we run it with the obtained initial con-
dition and observe its behavior. Note that the RSNN
shown in Fig. 6 has no input neuron and it is triggered
by the initial conditions. Figures 13 shows an exam-
ple of the time evolution of the internal state p
1
(t) of
SN
1
obtained from the result. It is observed that the
periodic firings with the desired number of spikes are
realized.
-1
-0.5
0
0.5
1
0 1 2 3 4 5
p
1
(t)
time
p
1
Figure 7: Time evolution of p
1
(t) after learning in Ex. 1.
-1
-0.5
0
0.5
1
0 1 2 3 4 5
p
2
(t)
time
p
2
Figure 8: Time evolution of p
2
(t) after learning in Ex. 1.
-1
-0.5
0
0.5
1
0 1 2 3 4 5
p
3
(t)
time
p
3
Figure 9: Time evolution of p
3
(t) after learning in Ex. 1.
-1
-0.5
0
0.5
1
0 1 2 3 4 5
p
4
(t)
time
p
4
Figure 10: Time evolution of p
4
(t) after learning in Ex. 1.
Learning Method of Recurrent Spiking Neural Networks to Realize Various Firing Patterns using Particle Swarm Optimization
485
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
0 1 2 3 4 5
p
1
(t)
time
p
1
Figure 11: Time evolution of p
1
(t) after learning in Ex. 2-I.
-1
-0.5
0
0.5
1
0 1 2 3 4 5
p
1
(t)
time
p
1
Figure 12: Time evolution of p
1
(t) after learning in Ex. 2-
II.
-1
-0.8
-0.6
-0.4
-0.2
0
0 5 10 15 20
p
1
(t)
time
p
1
Figure 13: Time evolution of p
1
(t) after learning in Ex. 3.
5 CONCLUSIONS
In biological neural networks of living organisms,
various firing patterns of nerve cells have been ob-
served, typical example of which are burst firings and
periodic firings. The RSNNs are expected to realize
various complicated firing patterns because of their
behavior as nonlinear dynamical systems. In this pa-
per we proposed a learning method which can real-
ize various firing patterns for RSNNs. We consid-
ered several desired properties of a target RSNN and
proposed cost functions for realizing them. Since the
proposed cost functions are not differentiable with re-
spect to the learning parameters and their gradients
do not exist, we propose larning methods based on
the particle swarm optimization (PSO). Some exper-
imental examples were provided to show the validity
of the proposed method.
This work was financially supported in part by
the Kansai University Fund for the Promotion and
Enhancement of Education and Research, 2018 and
JSPS KAKENHI (18K11483).
REFERENCES
Bohte, S. M., K., N., J., and Poutre, H. L. (2002). Error-
backpropagation in temporally encoded networks of
spiking neurons. Neurocomputing, Vol.48(Issues 1-
4):pp.17–37.
Gerstner, W., R. R. and van Hemmen, J. L. (1993a).
Why spikes? hebbian learning and retrieval of time-
resolved excitation patterns. Biological. Cybernetics,
Vol.69:pp.503–515.
Gerstner, W. and van Hemmen, J. L. (1993b). How to de-
scribe neural activities: Spikes, rates or assemblies?
Advances in Neural Information Processing Systems,
San Mateo, Vol.6:pp.363–374.
Izhikevich, E. (2007). Dynamical systems in Neuroscience
-The Geometry of Excitability and Bursting. MIT
Press.
Izhikevich, E. M. (2004). Which model to use for cortical
spiking neurons? IEEE Transactions on Neural Net-
works, Vol.15(No.5):pp.1063–1070.
Kennedy, J. and Eberhart, R. (2001). Swarm Intelligence.
Morgan Kaufmann Publishers.
Kuroe, Y. (1992). Learning method of recurrent neu-
ral networks. ISCIE Control and Information,
Vol.36(No.10):pp.634–643.
Kuroe, Y. and Ueyama, T. (2010). Learning methods
of recurrent spiking neural networks based on ad-
joint equations approach. Proc. of WCCI 2010 IEEE
World Congress on Computational Intelligence, pages
pp.2561–2568.
Lee, J.H., D. T. and Pfeiffer, M. (2016). Training deep spik-
ing neural networks using backpropagation. Frontiers
in Neuroscience, Vol.10(Article 508):pp.1–13.
Mass, W. (1996). On the Computational Complexity of Net-
work of Spiking Neurons, volume Vol.7. MIT Press.
Mass, W. (1997a). Fast sigmoidal networks via spiking neu-
rons. Neural Computation, Vol.9:pp.279–304.
Mass, W. (1997b). Networks of spiking neurons: The third
generation of neural network models. Neural Net-
works, Vol.10(No.9):pp.1659–1671.
Mass, W. and Bishop C., E. (1998). Pulsed Neural Nets.
MIT Press.
Rumelhart, D. E. and McClelland, J. L. (1986). Parallel
Distributed Processing, volume Vols. 1 and 2. MIT
Press.
Selvaratnam, K., K. Y. and Mori, T. (2000). Learning
methods of recurrent spiking neural networks - tran-
sient and oscillatory spike trains. Trans. of the Insti-
tute of Systems, Control and Information Engineers,
Vol.44(No.3):pp.95–104.
NCTA 2019 - 11th International Conference on Neural Computation Theory and Applications
486
