
Eye Detection with Faster R-CNN
Jiali Cui
1
, Fuqiang Chen
1
, Duo Shi
1
, Liqiang Liu
1
1
North China University of Technology, Beijing, China
Keywords: Iris recognition, Eye detection, Deep convolutional neural networks, Faster R-CNN.
Abstract: The accuracy of eye detection is crucial to a variety of biometric identification technologies, such as iris
recognition. The challenge of eye detection comes from improving accuracy of detection in the case of
occlusion or reflection of glasses. In this paper, an eye detection method based on Faster Region-based
Convolutional Neural Network (Faster R-CNN) is proposed. The method includes three import parts:
convolutional layers, region proposal network (RPN) and detection network. By training monocular and
binocular models on the training dataset, the recall of monocular and binocular models on test dataset can
reach 96% and 95% respectively, which proves that the proposed method based on Faster R-CNN has high
accuracy of detection in the task.
1 INTRODUCTION
Human eyes are important sensory organs and of rich
features of faces. With the development of biometric
recognition, eye detection is becoming an important
technology in computer vision. Eye detection is a
technology that locates eyes in images through
abstract features, and has been an essential step in
some pattern recognition technologies, such as iris
recognition and fatigue detection system (Fei Yang,
2013). In iris recognition system (Wildes, 2002),
locating the position of eyes is the first step of the
whole system, and then pupil and iris can be
segmented. Meanwhile, the size of iris can also been
obtained by eye detection. In fatigue detection system,
it should similarly locate the position of eyes, and
then establish eyes model and count the number of
blinks. The accuracy of eye detection directly affects
the final accuracy of iris recognition and other
biometric applications. In face detection systems, eye
detection is optional, the accuracy of face detection
can be improved while eye detection is adopted.
Due to the applications discussed above, many
algorithms of eye detection have been proposed by
studying the feature of eyes. The procedures of
algorithms contain two steps: model is firstly
established by manually selecting the feature of eyes,
and then the model is used to classify and locate eyes.
In the early 1990s, (Yuille, 1992) proposed a method
based on the eyes geometry to detect eyes. In 2005,
(Hamouz, 2005) used appearance features to locate
eyes. In 2011, (Fei Yang, 2011) proposed a human
eye localization algorithm based on texture features.
In recent years, some systems locate eyes by facial
landmarks, which can also report a good performance.
However, algorithms based on geometry, appearance
and texture features have terrible performance if the
picture is in the case of occlusion or reflection of
glasses. When facial landmarks are used to locate
eyes, there might be partial face in the task which
would fail to detect faces. Moreover, distinguishing
left eyes from right eyes was not referred in their work.
In this paper, an eye detection method based on
Faster R-CNN is proposed, which locates eyes with
high precision, and distinguishes left eyes from right
eyes in images which include even part of faces. All
the detection results will improve the accuracy and
speed of iris segmentation and feature matching.
2 OVERVIEW OF OBJECT
DETECTION
Object detection is a major research interest in
computer vision. The traditional framework of object
detection is manually designing features and
classifiers. With the development of neural network,
convolutional neural network (CNN) based object
detection can automatically design features and
classifiers by learning from big data and enable end-
to-end train.
Cui, J., Chen, F., Shi, D. and Liu, L.
Eye Detection with Faster R-CNN.
DOI: 10.5220/0008096201110116
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 111-116
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
111
2.1 Traditional methods
In the field of traditional computer vision, object
detection algorithms usually contain three parts:
choice of detection windows, feature selection and
classifier design. Algorithms of choosing detection
windows developed form sliding window based on
scales to Selective Search or Edge Box which is more
efficient to create region proposals because of multi
features. As for selecting features, there are many
classical methods, such as Local Binary Patterns
(LBP), Histogram of Oriented Gradient (HOG) and
so on. Support Vector Machine (SVM) or Decision
Tree is usually used as classifier in many object
detection systems. In general, traditional object
detection systems combine the three important parts
and perform well in some constrained scene. In this
paper, methods based on Faster R-CNN are used as
main procedure.
2.2 Evolution of Region-based CNNs
With the development of computing power, deep
convolutional neural networks have dominated many
tasks of computer vision. Deep learning can extract
abstract features by extensive data and repetitively
training, which can better express the key information.
The region-based convolution neural network has
well performances, so it has become the main
algorithm in the field of object detection.
In 2014, (Girshick, 2014) first proposed a region-
based CNN(R-CNN) for object detection. Compared
to tradition algorithms in object detection, it has high
accuracy of locating and classifying object. However,
it needs many feature extractors and SVM classifiers.
The training time is long. To mitigate these problems,
two methods, the SPP-Net (Kaiming, 2014) and the
Fast R-CNN (Girshick, 2015) have been proposed.
Instead of feeding each warped proposal image region
to the CNN, the SPP-Net and the Fast R-CNN run
through the CNN exactly once for the entire input
image. After mapping the proposals to the feature
maps of last convolutional layer, each proposal can
get scores of classes and coordinates in detection
layers. All of R-CNN, SPP-Net and Fast R-CNN rely
on the input generic object proposals, which come
from selective search (Uijlings, 2013). But it is
computationally intensive. To reduce the
computational burden of proposal generation, the
team of Ren proposed Faster R-CNN (Ren, 2015).
After Faster R-CNN is proposed, it is used in
many object detection applications. For example,
(Huaizu Jiang, 2016) proposed face detection
method based on Faster R-CNN. They reported state-
of-the-art results on two widely used face detection
benchmarks, FDDB and the recently released IJB-A.
3 PROPOSED METHOD
Faster R-CNN has become mainstream method in
many object detection applications. Faster R-CNN
abandons the traditional selective search algorithm to
extract proposed regions, and proposes Regional
Proposal Network (RPN), which is a fully
convolutional network. Faster R-CNN can be deemed
as the combination of Fast R-CNN and RPN.
Therefore, one network can extract region proposals
and locate objects. This network can run faster than
R-CNN and Fast R-CNN and can reach 8-9 frames
per second in professional GPU, such as NVIDIA
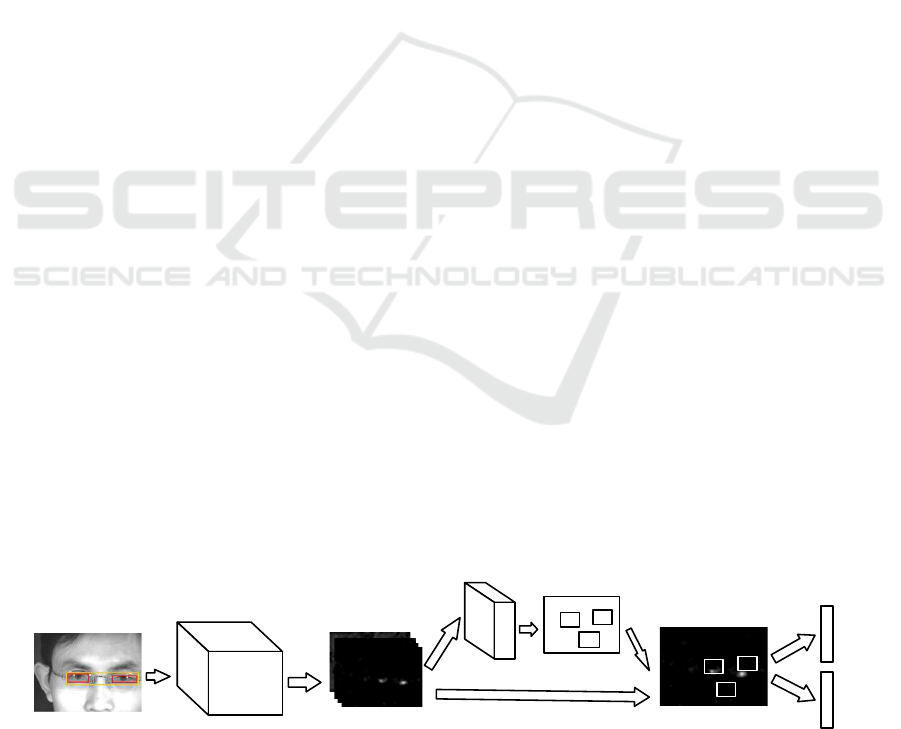
TITAN. The structure of Faster R-CNN is shown in
Figure 1.
This network contains the following three
important parts:
(1) Convolutional layers
At present, there are many CNN models,
including ZFNet (Zeiler, 2013), VGGNet (Simonyan,
2014), ResNet (Kaiming, 2016) and so on. In this
experiment, VGG16 and ResNet are selected as
convolution layers. Finally, comparison in
performance of two networks are made. The
convolution layer finally outputs feature maps with a
size of 1024 *51 * 28. By observing different
channels, different features are shown in Figure.2
Figure 1: Structure of Faster R-CNN.
Conv
layers
Input image
Feature mapConv layers
RPN Region proposals
Roi pooling
classifier
Regression
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
112
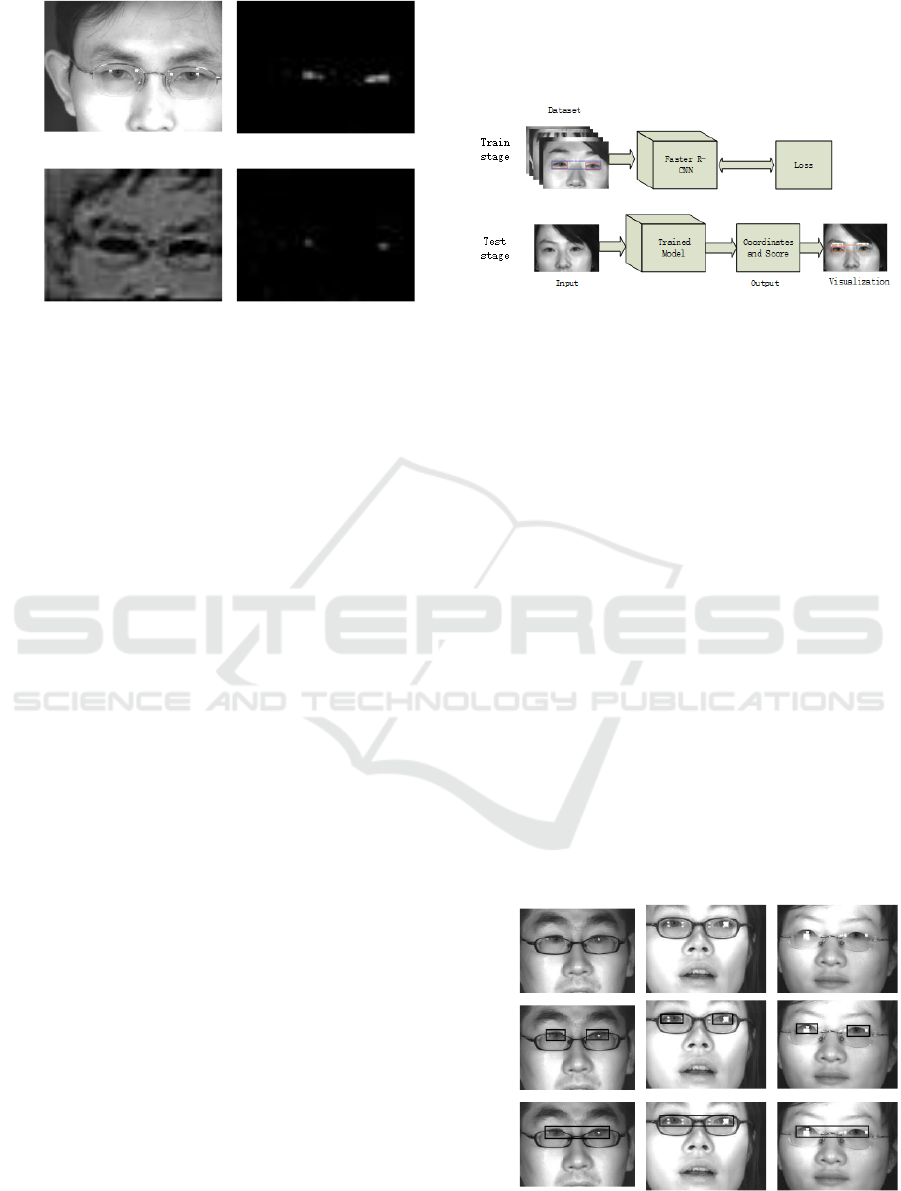
Figure 2: Feature maps of different channels (a) Original (b)
Eye area (c) Face area (d) Iris area.
(2) RPN
This part is to extract the region proposals. The
main process is to map the above 1024-dimensional
features to low-dimensional space (512), which is
followed by two full connection layers: one is
responsible for classification and the other is
responsible for regression. In the training stage,
anchors are defined as candidate areas that may
appear in the original image. In this experiment, the
RPN is trained by 256 generated anchors, including
128 positive samples and 128 negative samples. The
intersection over unit (IOU) of positive samples is
more than 0.7. If the IOU is less than 0.3, those
anchors are defined as negative samples.
(3) ROI pooling
This part has two inputs: one is the proposal
regions generated by RPN, and the other is the feature
maps from convolution layer. The main role is to
regress to the coordinate of eye area and class
category. ROI Polling is a special version of the space
pyramid pool proposed by SPP-Net. It does not use
different scales for the feature maps. In this
experiment, the convolution features of the ROI
region are divided into 7 * 7 meshes, and max pooling
in each mesh is made. Finally, a fixed length (49)
vector can be got, regardless of the size of the ROI
region.
4 EXPERIMENTS AND RESULTS
In this section, the process of experiment based on
Faster R-CNN is detailedly introduced. The overall
framework of the experiment is shown in Figure.3. In
the stage of training, collected infrared pictures are
used as training dataset for the purpose of iris
recognition. Deep model is trained through the Faster
R-CNN. In the stage of test, images from test dataset
are sent into trained model, and the outputs are
coordinates and score of class.
Figure3: System overview.
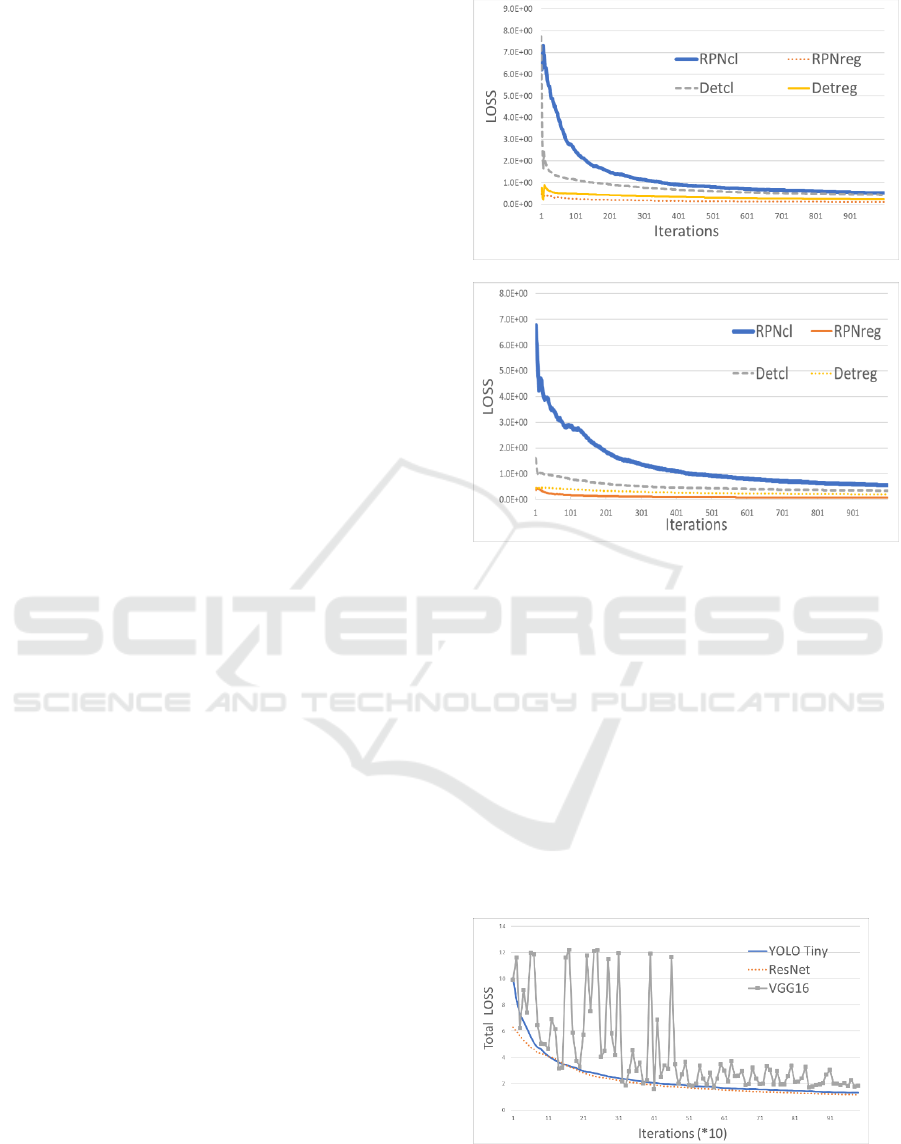
4.1 Training and Testing
In the experiment, the 1500 infrared images which
include varying degrees of occlusion or reflection of
glasses are selected in an open dataset (CASIA Iris
Image Database Version 4.0) for the purpose of iris
recognition. Sample images are shown in the first row
of Figure 4. These images are divided into two
datasets, namely training and test datasets. 1000
images are labeled as training dataset and the other
500 pictures are used as test dataset. Some original
images in training dataset are shown in Figure 4 (a)
and the corresponding labels are shown in Figure 4(b)
and (c), where black bounding boxes are ground-truth
annotations. In this experiment, monocular model and
binocular model are studied. Because binocular
model has symmetry, it may have more well-marked
features in eye detection. However, the premise of
detecting binocular model is to detect the monocular
model. In order to study the differences of monocular
and binocular model in eye detection, monocular
model and binocular model are compared in this
experiment. There are three labels: ‘left eye’, ‘right
eye’ and ‘eyes’.
Figure 4: Partial data: (a)original images (b)monocular
areas (c) binocular areas.
(a)
(b)
(c)
(d)
(a)
(b)
(c)
Eye Detection with Faster R-CNN
113
The size of original images is relatively large
(2400 * 1700). In these images, the average size of
the eyes area is 1500 * 230. Because the anchor in the
network is responsible for adapting to the scale, even
if the largest anchor (1024 * 512) can’t completely
cover the ground truth. To adapt the size of anchor,
images in training dataset are normalized: the
smallest side of the picture is scaled to 600, and the
other side does the same scale, so the anchor can
cover all possible cases; in addition, because the
number of images in dataset is small, the images are
augmented by small angles and translations.
The training process consists of the following two
steps:
(1) After training the RPN model based on a pre-
trained ImageNet model, detection network is trained
by proposed regions generated by RPN.
(2) The convolution layer is initialized with the
first stage trained weights instead of pre-trained
ImageNet model, and then the RPN is trained again.
Next, the proposed regions generated by RPN are
used to train the entire detection network. The process
of convolution layer achieves the weight of sharing.
The training code is run on a personal computer
with an Intel CPU I5-4590 of 3.30GHz and an
NVIDIA GTX 650 Ti GPU with 2GB memory.
During training stage, loss values of RPN and
detection net are recorded. The detailed work is
shown in chapter of 4.2.
After training, the trained model is used to detect
eyes on the test dataset. During test stage, the
accuracy and speed of different models are recorded.
4.2 Comparison and Analysis
In this experiment, three networks based on CNN,
which include VGG-based Faster R-CNN, ResNet-
based Faster R-CNN and You Only Look Once
(YOLO) (Redmon, 2015), are trained on the training
dataset. Firstly, the convergence speed and test speed
based on VGG16 and ResNet are compared, while the
accuracy of monocular model and binocular model
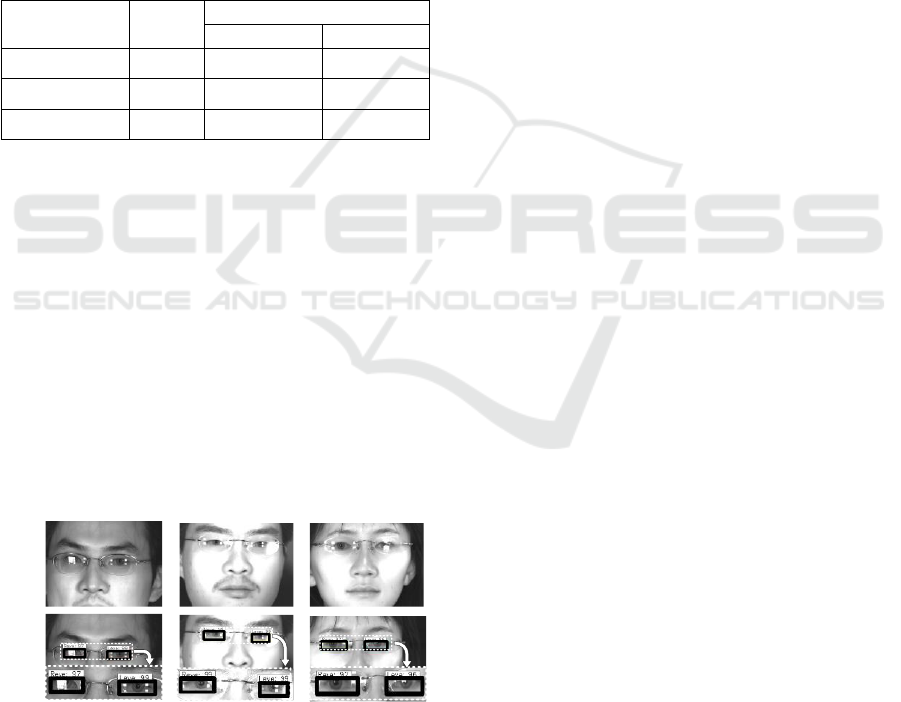
are also compared. In the training stage, the loss
function convergence of ResNet-based Faster R-
CNN is shown in Figure 5(a), while the loss function
convergence of VGG-based Faster R-CNN is shown
in Figure 5(b).
(a)
(b)
Figure 5: Downward trend of loss function (a)ResNet
(b)VGG16.
Figure 5 contain four kinds of loss function of the
decline: 'RPNcl' denotes the loss function of the RPN
network classification; 'RPNreg' denotes the RPN
network regression loss function; 'Detcl' denotes the
classification loss function of the whole detection
network; 'Detreg' denotes the whole network
regression loss function.
In order to compare equally the convergence rate,
the total convergence speed of the three networks are
compared in the 1000 iterations. The result is shown
in Figure 6.
Figure 6: The convergence rate of loss function.
From Figure.5 and Figure.6, we can see that in the
same iterations, the convergence speed of ResNet is
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
114
faster than others. Finally, ResNet-based Faster R-
CNN and VGG16-based Faster R-CNN are trained
10k iterations and YOLO is trained 50k iterations.
The loss of final results is that ResNet-based Faster
R-CNN get a smallest loss. After training, the
performance of those networks is compared on the
test dataset, which is evaluated by the term of recall
and speed. The recall is defined as in (1).
Recall = TP/(TP+FN)
(1)
TP represents the number of correct results, and
FN represents the number of instances that should be
correct but not be predicted. The speed is defined as
the average speed of processing each picture. The
comparison of these performance is shown in Table 1
Table 1: Comparison of test time and recall.
Network
Speed
Recall
Monocular
Binocular
ResNet
0.61s
96.3%
95.3%
VGG16
0.94s
94.8%
92.4%
YOLO(Tiny)
0.12s
47.4%
63.5%
From the comparison, the ResNet has better
performance on extracting features than VGG16.
ResNet-based Faster R-CNN has a faster
convergence rate and has higher accuracy. YOLO has
good performance on ImageNet, but it can’t work so
well in detecting some small object. In eye detection,
eye may be too small to make YOLO perform well in
monocular model. In addition, monocular model has
a higher accuracy than binocular model in region-
based CNNs. That proves that binocular model has
symmetry, but monocular model is easier to detect in
the Faster R-CNN model.
Finally, monocular model of ResNet-based Faster R-
CNN is selected. The model is used on test dataset.
Some results of visualization are shown in Figure 7.
Figure 7: Results on test dataset (a) test images (b) detection
results.
5 CONCLUSIONS
Inspired by improving the convenience of iris
recognition, an eye detection method based on Faster
R-CNN is proposed, which is robust to the case of
occlusion or reflection of glasses. Recall of the
monocular model can reach 96%. The experiments
show that the Faster R-CNN can also be well applied
in eye detection.
However, the method still has two main
drawbacks: generalization ability and processing
speed. Most of eyes in training and test dataset are on
clear front face, and the accuracy of detection would
be relatively low on dataset with blurred images. In
the future, some improvements will be made to solve
the drawbacks, such as enlarging training dataset and
changing the structure of network.
ACKNOWLEDGEMENTS
This work is supported by the National Key R&D
Program of China under Grant 2017YFB0802300
and Beijing Education Commission
(KM201510009005).
REFERENCES
Fei Yang et al., 2013, Robust eyelid tracking for fatigue
detection. IEEE International Conference on Image
Processing, pp.1829-1832.
Wildes R P , 2002, Iris recognition: an emerging biometric
technology[J]. Proceedings of the IEEE, 85(9):1348-
1363.
Alan L. Yuille et al., 1992, Feature extraction from faces
using deformable templates. International Journal of
Computer Vision, 8(2), pp.99–111.
Hamouz M. et al., 2005, Feature-based affine invariant
localization of faces. IEEE Trans. Pattern Analysis and
Machine Intelligence, 27(9), pp.1490–1495.
Fei Yang et al., 2011, Eye localization through multiscale
sparse dictionaries. Conference on Automatic Face
and Gesture Recognition, pp.514–518.
Girshick et al., 2014, Rich feature hierarchies for accurate
object detection and semantic segmentation. CVPR,
pp.580–587.
Girshick R., 215, Fast R-CNN. ICCV, pp.1440–1448.
Kaiming.He et al., 2014, Spatial pyramid pooling in deep
convolutional networks for visual recognition. ECCV,
pp.346–361.
Uijlings J.R et al., 2013, Selective search for object
recognition. International Journal of Computer Vision,
104(2), pp.154–171.
(b)
(a)
Eye Detection with Faster R-CNN
115

S. Ren et al., 2015, Faster R-CNN: towards real-time
object detection with region proposal networks. NIPS,
pp.91–99.
Huaizu Jiang et al., 2016, Face Detection with the Faster
R-CNN[J], pp.650-657.
Zeiler M D et al., 2013, Visualizing and Understanding
Convolutional Networks[J], pp.818-833.
K. Simonyan and A. Zisserman., 2014, Very deep
convolutional networks for large-scale image
recognition. CORR, pp.1409.
Kaiming He et al., 2016, Deep Residual Learning for
Image Recognition. Computer Vision and Pattern
Recognition. IEEE, pp.770-778.
CASIA Iris Image Database Version, more information is
seen http://www.cbsr.ia.ac.cn/english/IrisDatabase.asp
Redmon J, et al., 2015, You Only Look Once: Unified,
Real-Time Object Detection, pp.779-788.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
116
