
Mapping Land Cover Types using Sentinel-2 Imagery: A Case Study
Laura Annovazzi-Lodi, Marica Franzini and Vittorio Casella
Department of Civil Engineering and Architecture, University of Pavia, Via Ferrata 5, Pavia, Italy
Keywords: Sentinel-2, Remote Sensing, Supervised Classification, SVM and Land Cover.
Abstract: This paper presents a case study of automatic classification of the remotely sensed Sentinel-2 imagery, from
the EU Copernicus program. The work involved a study site, located in the area next to the city of Pavia, Italy,
including fields cultivated by three farms. The aim of this work was to evaluate the so-called supervised
classification applied to satellite images and performed with Esri's ArcGIS Pro software and Machine Learn-
ing techniques. The classification performed produces a land use map that is able to discriminate between
different land cover types. By applying the Support Vector Machine (SVM) algorithm, it was found that, in
our case, the pixel-based method offers a better overall performance than the object-based, unless a specific
class is exclusively taken into consideration. This activity represents the first step of a project that fits into the
context of Precision Agriculture, a recent and rapidly developing research area, whose aim is to optimize
traditional cultivation methods.
1 INTRODUCTION
The World Population Prospect document of the
United Nations (DESA, 2017) predicts that the world
population will rise to 9.8 billion by 2050. All over
the planet, there will be a corresponding increment in
food demand, and this is one of the major humanity
challenges.
Furthermore, climate change, environmental deg-
radation, the ever increasing demand for water and
energy, socio-political and economic changes are just
a few examples of factors that necessarily motivate us
to integrate technological innovation in the produc-
tive processes of modern agriculture in a consolidated
way that makes it more fruitful and, at the same time,
sustainable (MiPAAF, 2017), (Chhetri et al., 2012).
Thematic maps show the spatial distribution of a
generic indicator and depict environmental and phys-
ical factors (geological maps, distribution of water re-
sources, entity of precipitations, etc.), biological (dis-
tribution of forests, surface of agricultural crops and
their production, etc.) or social ones (census distribu-
tion, population’s average age, health, etc.). Land use
maps are particular thematic maps where the terrain
is subdivided into several categories belonging to a
pre-defined list such as: roads, buildings, forest, fields
and so on: the level of detail of the classification de-
pends on the goal and on the degree of detail of the
data used to produce the map.
The most used way to produce large-scale land
use maps is the classification of remote sensing im-
ages.
Among land cover maps, crop type maps are nec-
essary for different purposes and provide crucial in-
formation for monitoring and management of the ag-
ricultural sector. According to (Marais-Sicre et al.,
2016) they can be employed, for example, to estimate
the specific use of water for a certain type of cultiva-
tion or to identify the various types of crops before
the start of the irrigation season, so as to study the best
strategy resource management for water, which is
both sustainable and resourceful. They are also useful
in creating growth models that allow for estimation of
crop yield.
These maps are therefore essential in the field of
Precision Agriculture (PA). PA is the application of
technologies and principles to manage spatial and
temporal variability associated with all aspects of ag-
ricultural production for improving crop performance
and environmental quality (Pierce and Nowak, 1999).
PA is based on a bunch of Geomatics techniques: ter-
ritory survey, satellite navigation and GIS. Crop maps
are also required by policy and decision-makers for
economics, management and for agricultural statistics
(Immitzer et al., 2016). Information recorded and pro-
duced in the frame of PA could facilitate different ad-
ministrative and control procedures (Zarco-Tejada et
al., 2014).
242
Annovazzi-Lodi, L., Franzini, M. and Casella, V.
Mapping Land Cover Types using Sentinel-2 Imagery: A Case Study.
DOI: 10.5220/0007738902420249
In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2019), pages 242-249
ISBN: 978-989-758-371-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The goal of this study is to assess supervised clas-
sification, both object- and pixel-based, applied to a
Sentinel-2 image. This activity is the first step of a
project of classification of parcels of land according
to the type of agricultural crop practiced, that fits into
the context of PA.
2 MATERIALS
2.1 Study Area
The study site (Figure 1) is located about 15 km north-
west of the city of Pavia, Italy; it covers a total area
of 3220 ha. The considered site belongs to the terri-
tory of the Pianura Padana, which offers the best con-
ditions for the cultivation of rice: wet climate, loose
soil and large water availability. The study area con-
tains different land covers/use categories such as
cropland, woods, industrial and urban areas, roads
and a stretch of the river Ticino including its mean-
ders.
2.2 Ground Truth
By interviewing farm owners, in situ reference data
concerning the year 2017, was collected. The infor-
mation gathered for each agricultural plot was crop
type, sowing and harvesting date. The plots are char-
acterized by a large variety of shapes (square, rectan-
gular or triangular). The main cultivated crops in this
region are ryegrass, maize, barley, grassland, rice, rye
and soybean.
The reference data concerning the rest of the site,
such as the water of the river Ticino or the asphalt of
the roads, was obtained observing a very high-resolu-
tion satellite image, acquired by Digital Globe and
provided by Esri within its products; its ground reso-
lution is, for the considered area, 30 cm. The so-ob-
tained data was also verified both by examining the
relative Google Street View images and by direct in-
spection of the areas under study.
Based on the data collected and observed, 439
polygons were manually drawn and created, corre-
sponding to a total area of just over 800 ha. To pre-
cisely draw the polygons, the raster maps of the fun-
damental regional cartography were downloaded
from the Geoportal of the Lombardy Region (URL-
1), related to the area of interest. Since the regional
maps are not completely up-to-date, and are therefore
considered only partially reliable, the high-resolution
satellite image mentioned above was jointly used as
base map.
It was decided to eliminate polygons exclusively
dedicated to rye, soybean, pea and other vegetables
(and not the plots intended for catch crop cultivation)
because the number of polygons was not sufficient to
create a distinction of the spectral signature, as well
as to avoid large class imbalances. Hence, the final
number of polygons taken into consideration for our
study was 418, with a total area of almost 774 ha (Ta-
ble 1).
The so-obtained ground truth map is organized as
a time-dependent GIS layer. The record associated
with each polygon has a textual field describing the
time frame of the various crops related to it. Once a
date is chosen, a truth map containing the real classi-
fication at that time can be defined by manually filling
a numeric field.
Figure 1: On the left: the study area (framed in black), next to the city of Pavia [Open Street Map]. In the middle: the extent
of the Sentinel-2 Tile 32TMR (https://scihub.copernicus.eu/dhus/#/home). On the right: S-2 scene (TCI) of the study area.
Mapping Land Cover Types using Sentinel-2 Imagery: A Case Study
243

Table 1: Number of polygons and surface corresponding to
each class.
Class
Number of
polygons
(ha)
Water
27
16.47
Asphalt
39
8.92
Wood
37
111.63
Industrial
10
15.85
Barley
25
39.12
Grassland
62
85.44
Bare soil
199
427.56
Urban
19
68.48
TOT.
418
773.47
2.3 Satellite Data and Crop Phenology
Sentinel-2 mission is a land monitoring constellation
of two satellites (Sentinel-2A and Sentinel-2B, re-
spectively launched on 22.06.2015 and on 7.03.2017)
flying in the same orbit but phased at 180°, designed
to give a high revisit frequency of 5 days at the Equa-
tor. It carries an innovative wide-swath, high-resolu-
tion, multi-spectral imager (MSI) with 13 spectral
bands with 10, 20 and 60 m spatial resolution.
In this study, since the data collected was relative
to the year 2017, all the S-2 images of that year were
downloaded (concerning the area of interest, corre-
sponding to the tile 32TMR - ESA’s scene naming
convention). After visual inspection, it was decided to
exclude the images with high cloud coverage at the
granule level and with cloud cover concentrated right
in the study area. Therefore, 15 images (out of 109)
were taken into consideration. Eventually, the image
acquired on May 17 was chosen. The choice was con-
sidered optimal for our classification and was defined
after careful considerations of several aspects listed
below.
For the differentiation of crop types, phenology is
considered as a key factor.
Phenology is defined as the periodicity of key
events in the life cycle of living species, their chro-
nology and their relationship between climate factors
and seasonal events over time (Schwartz, 2003). For
this reason, a chronogram was created, ranging from
March to November and related to the major crop
types (Figure 2).
During the interviews, it was possible to collect
information on the timing of the vegetation cycles and
the phenology of the agricultural crops that are pre-
sent in the study area. The so-obtained knowledge
base has been further implemented by materials found
on the internet and on common agricultural books.
Ryegrass is an autumn-winter forage crop that
grows rapidly. It is sown from the end of September
to the beginning of November, while the harvest usu-
ally takes place in April. This plant is suitable for ro-
tation with maize, with which it is replaced from May
until mid-June.
Maize is one of the most important and wide-
spread cereal crops in our country. Since it requires a
warm and temperate climate, to facilitate its growth
at ever-mild temperatures, sowing usually takes place
from the end of March to April-May, but may con-
tinue until mid-June. The emergency phase can occur
up to about 20 days later. Harvest takes place from
the beginning of August to October.
Grassland is a stable lawn whose phenology de-
pends on certain factors such as climatic conditions,
type of soil and use (hayfields, grazed grassland or
water meadow).
The water meadow is a land permanently irrigated
in winter months by a veil of water, which flows by
gravity in order to prevent the excessive cooling of
the ground. Such a technique allows the grass to grow
even at low temperatures. The water is kept moving
by the slight slope of the ground. During the summer
season, however, periodic irrigations of the area are
carried out, as in a common lawn. In the area of the
river Ticino, given the particular conformation of
humps and valleys typical of these dedicated fields,
the cultivation of water meadows is difficult, but for
its historical importance, about 300 hectares have
been preserved.
Figure 2: Chronogram of sowing and harvesting periods of crops belonging to the largest number of polygons.
Phase
1|15 16|31 1|15 16|30 1|15 16|31 1|15 16|30 1|15 16|31 1|15 16|31 1|15 16|30 1|15 16|31 1|15 16|30
Sowing Ryegrass Ryegrass
Mai ze Mai ze
Barley Barley
Rice
Soybean
Harvest
Barley Barley
Rice
March
April
May
June
November
Ryegrass
September
October
Mai ze
Mai ze
July
August
Soybean
Ryegrass
Mai ze
Rice
Soybean
Mai ze
Rice
Mai ze
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
244

Barley is an unripe crop and the calendar of its
vegetation cycle is rather short, giving it an excellent
adaptability to very different environments. The vari-
eties used in the study area have a good resistance to
cold, so barley is sown between the end of October
and early November. The harvesting phase takes
place at the beginning of summer. Coming to rice, its
sowing season is from April to May. In September,
when the plant has reached full ripeness, the harvest
begins, which lasts until October.
Based on the reported considerations, the autumn-
winter dates have been excluded because almost all
polygons belong to the "bare soil" category, leading
to poorly significant results. May 17
th
was chosen be-
cause the existing crops are well defined. Indeed,
mid-May is the sowing period of maize and rice
crops, so their related plots are still identifiable as
“bare soil”. Barley, on the other hand, is ready to be
harvested, so well developed and distinguishable.
Even grassland, sown in April, is lush and flourishing.
In conclusion, eight categories were considered
for the described classification experiment. They are
listed in Table 1 and include as agricultural crops:
barley, permanent grass and wood. Also, the ground
truth map was defined according to the general sched-
ule described by the farmers; but real activities
(shown in the image) can be slightly misaligned,
therefore the map was tuned by observing the selected
Sentinel-2 image; the adopted map is shown in Fig. 3.
3 METHODS
Different processes were applied to the collected data,
by using the ESRI ArcGIS Pro software program, in
order to create the land cover map. The workflow is
summarized below (Figure 4):
Figure 4: Workflow of our study.
Figure 3: Ground Truth corresponding to 17 May 2017. The background image is the S-2 scene (TCI) of the study area.
Mapping Land Cover Types using Sentinel-2 Imagery: A Case Study
245

3.1 Pre-processing
Firstly, it should be noted that each S-2 tile covers an
area of 100 km x 100 km. With the aim to alleviate
the load of data during the processing stages of clas-
sification, the tile was clipped in order to circum-
scribe only the area of interest for our study. Atmos-
pheric correction was not necessary because the im-
age was clear within the study site: cloud-free Level
1 image (ToA reflectance) was used. Thanks to the
flat terrain and the good geolocation accuracy, geo-
metric pre-processing was not needed either.
For this study, it was decided to exclude the three
atmospheric bands at 60 m, i.e. B1 Coastal Aerosol,
B9 Water Vapor and B10 SWIR Cirrus. The four
spectral bands B2 Blue, B3 Green, B4 Red and B8
NIR have a resolution of 10 m. The remaining six
bands acquired at 20 m, i.e. the three of Red Edge
such as B5, B6 and B7 and B8A Narrow NIR, and the
two of SWIR such as B11 and B12, have been
resampled. This was done in order to obtain a layer
stack of 10 spectral bands at 10 m. After being
resampled, each band layer has been equalized. In-
deed, pixel values in each band layer were linearly
stretched to the [0, 65535] interval, to give each layer
the same weight, being classification sensitive to the
range of gray levels.
The next step in the workflow was to apply the
Principal Component Analysis (PCA). This is a math-
ematical method used in multivariate statistics to con-
vert a set of variables that are probably correlated to
a set of independent variables, called principal com-
ponents, by using a linear transformation (Abdi and
Williams, 2010). All the principal components are
linear combinations of the original variables and are
orthogonal to each other and therefore independent.
The newly-generated components are sorted so that
most of the information is mainly concentrated in the
first few bands. In our case, the first three compo-
nents, containing more than 99% of the original infor-
mation, were only kept. It should also be noted that
the first component itself contains 95% (Table 2).
Table 2: Results of the PCA step.
PERCENT AND ACCUMULATIVE EIGENVALUES
PC
Layer
Eigen Value
Percent of
Eigen Values
Accumulative of
Eigen Values
1
15545565733,63619
95,1596
95,1596
2
431399292,54862
2,6407
97,8003
3
300945980,90906
1,8422
99,6425
4
48264348,94573
0,2954
99,9379
5
4919188,92151
0,0301
99,9680
6
2071351,24574
0,0127
99,9807
7
1343666,65108
0,0082
99,9889
8
1082935,84931
0,0066
99,9956
9
425339,96901
0,0026
99,9982
10
297827,18188
0,0018
100,0000
In the present work, pixel-based classification is
tackled, as well as object-based. The latter implies
that image is segmented: adjacent pixels with similar
spectral bands are grouped. Then segments are treated
as a whole and classified.
ArcGIS adopts the mean shift algorithm that is a
non-parametric, feature-space analysis technique for
locating the maxima of a density function (Fukunaga
and Hostetler, 1975), (Comaniciu and Meer, 2002).
The software requires three parameters: spectral de-
tail, spatial detail and minimum segment size. The
first one sets the level of importance given to spectral
differences between pixels. The second parameter
controls the level of relevance given to the proximity
between pixels. The last one represents a merging cri-
terion. It is good practice to test different combina-
tions of the parameters until the desired result is
found.
Based on our experience and after visually evalu-
ating the result of segmentation, the final parameters
chosen are shown in Table 3.
Table 3: Parameters sets for the segmentation.
Spectral
detail
Spatial
detail
Minimum segment
size in pixels
19
2
20
3.2 Classification
In general, the main objective of supervised tech-
niques (adopted in the present work) is to learn from
a training data set and to be able to make predictions,
i.e. give unclassified pixels or segment a label.
Ground Truth datasets are typically split into two dis-
tinct group and intended for two different functions:
-Training samples: once selected and labeled,
they are used to train the algorithm and to generate
a classification scheme, based on spectral signa-
tures to be applied to the rest of the objects/ pixels
with unknown labels;
-Test set (or Reference dataset): such samples are
not used for training and, being labelled, can be
used to assess the accuracy of classification, in a
statistically independent and rigorous way.
Indeed, a supervised classification consists of
three phases. The first (learning or calibration phase)
and the second (prediction phase) employ training
samples, instead the last one (validation phase) uses
test sets. We used 50% of Ground Truth for training
and 50% for validation.
A number of algorithms for supervised classifica-
tion have been developed over time. We selected the
multiclass Support Vector Machine (SVM) because it
provides a powerful, robust and modern method. The
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
246
principal advantage of this machine-learning algo-
rithm is that it can successfully work with a small
number of training samples (Taskin et al., 2011), as
in our case. Developed by Vapnik and his collabora-
tors, instead of estimating the probability densities of
the classes, it directly solves the problem of interest
by determining the classification boundaries between
the classes (Vapnik, 1979). Basically, the algorithm
tries to find optimal hyperplanes to separate training
samples into a predefined number of classes and by
maximizing the margin between the classes, looking
for hyperplanes as distant as possible from the train-
ing samples of classes (Kowalczyk, 2017). It is also
able to separate non-linear problems through the so-
called SVM trick, based on the kernel method.
3.3 Accuracy Assessment
Without a validation phase, the final classified map
cannot be reliably used and, therefore, its applicabil-
ity is limited. The accuracy of the classified image is
assessed by comparing the classified map, obtained
from the classification process, with the reference da-
taset. It should be noted that, usually, validation does
not occur by verifying all the pixels contained in the
test set, but only a limited number. We decided to ran-
domly generate 5000 points from the test set of poly-
gons and compare the prediction and ground truth
with them. The validation phase provides information
on the product quality and identifies probable sources
of error by analyzing the confusion matrix, which
summarizes the correct and incorrect predictions
made. For pixel- and object-based classifications, the
information contained in the confusion matrix is used
to evaluate some common statistical measures, which
express the quality of the classification. These in-
cluded the overall accuracy (OA), the producer’s ac-
curacy (PA), the user’s accuracy (UA), the omission
and the commission errors, and the Kappa coefficient.
4 RESULTS AND DISCUSSION
In this section, classification results and accuracy as-
sessment are shown. As already introduced, we per-
formed both object- and pixel-based classification us-
ing the SVM algorithm. Three iterations were per-
formed: the first one with the 8 classes listed in Tab.1;
the second iteration with 7 classes as Asphalt and Ur-
ban were merged; the third one with 6 classes as In-
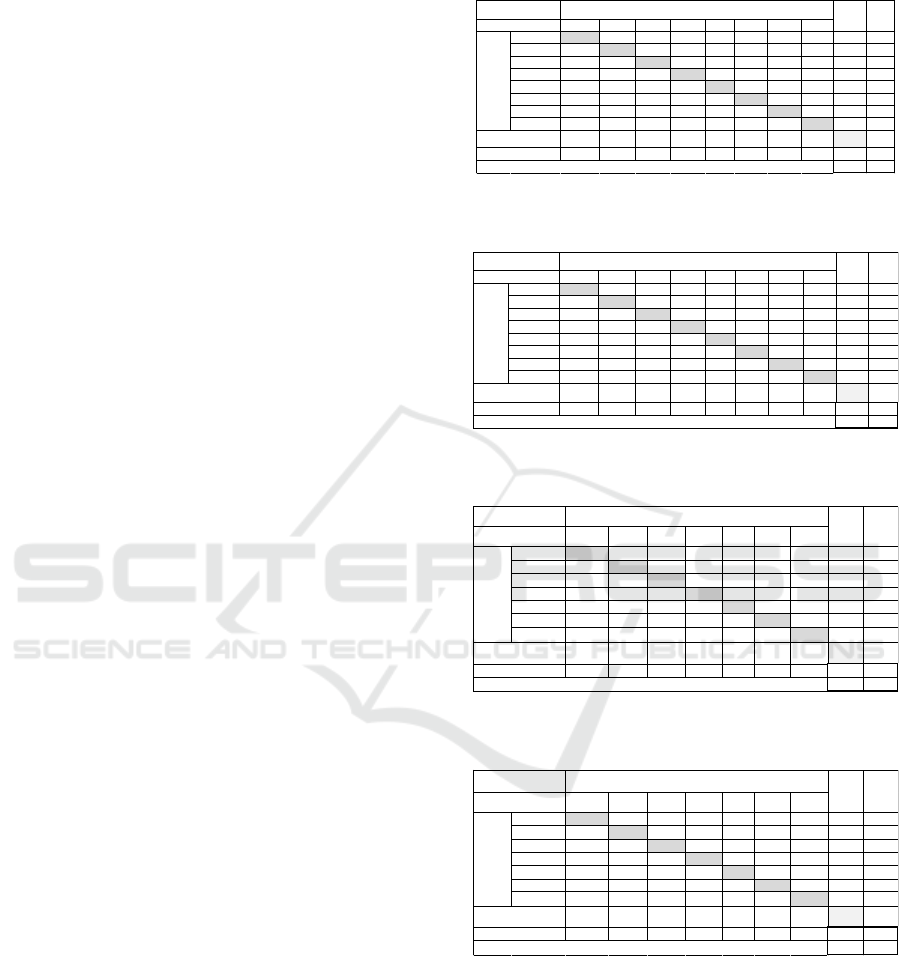
dustrial was merged too. Tables 4 to 7 show the con-
fusion matrix for object- and pixel-based classifica-
tion, for iteration 1 and 2; the third iteration is not il-
lustrated since it gave limited improvements.
Table 4: Confusion matrix for the first object-based classi-
fication.
Table 5: Confusion matrix for the first pixel-based classifi-
cation.
Table 6: Confusion matrix for the second object-based clas-
sification.
Table 7: Confusion matrix for the second pixel-based clas-
sification.
Concerning the first iteration, the two methods
achieved a satisfactory overall accuracy and a very
good Kappa coefficient, presenting minimal differ-
ences. However, by analyzing the confusion matrix in
detail, we observed errors.
In relation to the object-based classification (Ta-
ble 4), the lower PA is that of Asphalt with a value of
26%. The Asphalt class was often confused with that
of the Urban. We did not observe the opposite error,
Bare soil Urban Industrial Asphalt Water Grassland Wood Barley
Bare soil 2552 33 10 13 16 34 2 8 2668 0.957
Urban 250 366 13 20 0 2 0 0 651 0.562
Industrial 1 0 46 0 0 0 0 0 47 0.979
Asphalt 0 0 0 12 0 0 1 0 13 0.923
Water 0 0 0 0 68 0 0 0 68 1.000
Grassland 2 0 0 0 0 430 16 21 469 0.917
Wood 73 0 1 1 0 25 633 36 769 0.823
Barley 21 0 0 0 5 57 64 170 317 0.536
2899 399 70 46 89 548 716 235 5002
0.880 0.917 0.657 0.261 0.764 0.785 0.884 0.723 OA 0.855
Kappa 0.775
UA
PA
Classified
Totals
Reference Totals
Classified Data
Reference Dataset
Object-based
Bare soil Urban Industrial Asphalt Water Grassland Wood Barley
Bare soil 2514 72 26 13 4 29 23 30 2711 0.927
Urban 276 312 6 14 0 4 0 0 612 0.510
Industrial 2 9 38 3 0 0 0 0 52 0.731
Asphalt 4 4 0 15 0 0 1 1 25 0.600
Water 0 0 0 0 85 0 0 0 85 1.000
Grassland 40 1 0 0 0 452 7 38 538 0.840
Wood 25 1 0 0 0 22 640 19 707 0.905
Barley 38 0 0 1 0 41 45 147 272 0.540
2899 399 70 46 89 548 716 235 5002
0.867 0.782 0.543 0.326 0.955 0.825 0.894 0.626 OA 0.840
Kappa 0.751
Classified
Totals
UA
Reference Totals
PA
Reference Dataset
Classified Data
Pixel-based
Bare soil Industrial Water Grassland Wood Barley
Asphalt+
Urban
Bare soil 2538 24 7 27 20 36 97 2749 0.923
Industrial 9 39 0 0 0 0 19 67 0.582
Water 2 0 82 0 0 1 0 85 0.965
Grassland 51 0 0 453 2 28 0 534 0.848
Wood 23 0 0 15 648 22 2 710 0.913
Barley 19 0 0 50 45 148 0 262 0.565
Asphalt+Urban 257 7 0 3 1 0 326 594 0.549
2899 70 89 548 716 235 444 5001
0.875 0.557 0.921 0.827 0.905 0.630 0.734 OA 0.847
Kappa 0.759
Reference Totals
PA
Classified
Totals
UA
Classified Data
Reference Dataset
Pixel-based
Bare soil Industrial Water Grassland Wood Barley
Asphalt+
Urban
Bare soil 2380 2 39 42 21 3 151 2638 0.902
Industrial 8 117 0 0 0 0 19 144 0.813
Water 0 0 70 0 0 0 0 70 1.000
Grassland 5 0 0 462 9 3 0 479 0.965
Wood 43 0 16 35 620 10 3 727 0.853
Barley 40 0 0 16 36 255 1 348 0.733
Asphalt+Urban 151 17 0 1 42 0 383 594 0.645
2627 136 125 556 728 271 557 5000
0.906 0.860 0.560 0.831 0.852 0.941 0.688 OA 0.857
Kappa 0.788
UA
Reference Totals
PA
Classified Data
Reference Dataset
Classified
Totals
Object-based
Mapping Land Cover Types using Sentinel-2 Imagery: A Case Study
247

i.e. Urban was never classified as Asphalt. In addi-
tion, the Industrial class was classified as Urban in 13
cases out of 70, resulting in a PA of 66%. Also, in this
case, the opposite error was never observed, i.e. Ur-
ban was never classified as Industrial. As concerning
the UA, we have low values for the Urban, which was
classified as Bare Soil (250 out of 651), as we can see
in Table 4. Similarly, in the pixel-based confusion
matrix (Table 5), it was possible to observe confusion
between Urban and Asphalt categories (although
slightly less frequent) and classification errors be-
tween Bare soil and Urban classes (a little more fre-
quent). The distinction between Urban, Industrial and
Asphalt classes is not a major requirement in view of
our future project of crop detection. As already men-
tioned, given the described classification errors, it
was decided to perform a second iteration after merg-
ing the Urban and Asphalt classes and a third one by
aggregating Industrial too. Such strategy aimed at im-
proving accuracy without losing discrimination
power between agricultural crops.
A third iteration did not achieve a substantial im-
provement, and therefore results from the second one
(characterized by the merge of Asphalt and Urban
into a unique category) are briefly discussed.
By observing the confusion matrix derived from the
second iteration of the object-based classification
(Table 6), and comparing it with that corresponding
to the first iteration, it was immediately observed that
all the PA values were greater than 0.5 and those of
the UA were greater than 0.6. In particular, for the
Asphalt class the low PA of 0.26 did not appear. The
same observation can be applied to the second itera-
tion of pixel-based classification matrix (Table 7),
compared with the corresponding matrix of the first
iteration. The PA values were always higher than
0.55, whereas the UA was always higher than 0.54. In
particular, for the Asphalt class the low PA of 0.33
did not appear. On the other hand, a reduction of the
PA and UA accuracy of some classes, for example the
PA of Water in the object-based matrix, was found.
Essentially, there were fewer accuracy problems with
the pixel-based classification.
Figure 5: Land cover maps resulting from the first iteration. On the left: Object-based classification. On the right: Pixel-based
classification.
Figure 6: Land cover maps resulting from the second iteration, after merging Asphalt and Urban (seven land cover types). On
the left: Object-based classification. On the right. Pixel-based classification.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
248

The direct comparison between the two matrices
of the second iteration shows that the object-based
classification is more suitable for the Industrial class
and for the Barley class, while the pixel-based classi-
fication better predicts Water. Naturally, the improve-
ment of both compared to the first level is due pre-
cisely to the incorporation of classes Asphalt and Ur-
ban. It can be said that, in general, the pixel-based
method offers a higher average performance than the
object-based, unless a specific class is only focused.
Table 8: Overall Accuracy Summary of the first and second
iteration.
I object-
based
I pixel-
based
II object-
based
II pixel-
based
OA
0.855
0.840
0.857
0.846
Land cover maps for both methodologies and iter-
ations 1 and 2 are shown in Figures 5, 6.
A final remark concerns processing time. Object-
based classification takes a few minutes for segmen-
tation on a quad-code personal computer and another
few minutes for training and classification. Pixel-
based needs several hours.
5 CONCLUSIONS
The workflow presented in this study was developed
with the aim of evaluating the potentials obtainable
from the classification of remote sensing images pro-
vided by the Sentinel-2 satellites, in particular that of
creating land covers and use maps. The study area
concerned a neighboring area to the town of Pavia,
Italy. Data for training and accuracy assessment was
personally collected by interviewing farm owners,
observing a very high-resolution satellite image and
with inspection of the areas pertained to as well. The
date May 17
th
2017 was chosen for the study.
As inputs, 10 spectral bands resampled to 10 m
were used. Through ArcGIS Pro (Esri), the pixel-
based and object-based supervised classifications
were applied, using the multiclass SVM algorithm.
The procedures were iterative, to best satisfy the lev-
els of accuracy desired. Thanks to the different bands
available that allow recognizing specific spectral sig-
natures for the objects observed, the multispectral im-
age used has been well suited to the identification of
the different types of coverage present in the area of
interest. It can be said that in general the pixel-based
method offers a better average performance than the
object-based one, unless interested in specific classes.
However, the two methods offer a comparable overall
accuracy. On the other hand, it is also necessary to
take into account the processing time: a few minutes
in the case of object-based classification, several
hours for the pixel-based method. Considering the
overall accuracy results obtained in this study (Table
8), we can conclude that the supervised method is
quite effective for land cover detection.
REFERENCES
Abdi, H., Williams, L. J., 2010. Principal component analy-
sis. In Wiley Interdisciplinary Reviews: Computational
Statistics, vol. 2, no. 4, pp. 433-459.
Chhetri, N., Chaudhary, P., Tiwari, P. R., Yadaw, R. B.,
2012. Institutional and technological innovation: Under-
standing agricultural adaptation to climate change in Ne-
pal. Applied Geography, 33, 142-150.
Comaniciu, D., Meer, P., 2002. Mean shift: A robust ap-
proach toward feature space analysis. IEEE Trans. Pat-
tern Anal. Mach. Intell. , 24, 603–619.
DESA, U., 2017. World population prospects, the 2017 Re-
vision, Volume I: comprehensive tables. New York
United Nations Department of Economic & Social Af-
fairs.
Fukunaga, K., Hostetler, L., 1975. The estimation of the gra-
dient of a density function, with applications in pattern
recognition. IEEE Trans. Inf. Theory, 21, 32–40.
Immitzer, M., Vuolo, F., Atzberger, C., 2016. First Experi-
ence with Sentinel-2 Data for Crop and Tree Species
Classifications in Central Europe, Remote Sensing.
Kowalczyk, A., 2017. Support Vector Machines succinctly,
Succinctly E-book series, Syncfusion Inc.
Marais-Sicre, C., Inglada, J., Fieuzal, R., Baup, F., Valero, S.,
Cros, J., Huc, M., Demarez, V., 2016. Early Detection of
Summer Crops Using High Spatial Resolution Optical
Image Time Series, Remote Sensing.
MiPAAF, 2017. Linee Guida per lo Sviluppo
dell’Agricoltura di precisione in Italia. In Pubblicazioni
Ministero delle Politiche Agricole Alimentari e Forestali
Pierce, F. J., Nowak, P., 1999. Aspects of precision agricul-
ture. In Advances in agronomy.
Schwartz, M. D., 2003. Phenology: An Integrative Environ-
mental Science, Dordrecht: Kluwer Academic Publish-
ers.
Taskin Kaya, G., Musaoglu, N., Ersoy, O. K., 2011. Damage
assessment of 2010 Haiti earthquake with post-earth-
quake satellite image by support vector selection and ad-
aptation. Photogrammetric Engineering & Remote Sens-
ing, 77(10), 1025-1035.
URL-1: http://www.geoportale.regione.lombardia.it
Vapnik, V., 1979. Estimation of Dependences Based on Em-
pirical Data. Nauka, Moscow, pp. 5165–5184, 27 (in
Russian) (English translation: Springer Verlag, New
York, 1982).
Zarco-Tejada, P., Hubbard, N., Loudjani, P., 2014. Precision
Agriculture: An Opportunity for EU Farmers - Potential
Support with the CAP 2014-2020. In Joint Research
Centre (JRC) of the European Commission publication
Mapping Land Cover Types using Sentinel-2 Imagery: A Case Study
249
