
Reducing Computational Complexity of Real-Time Stereoscopic Ray
Tracing with Spatiotemporal Sample Reprojection
Markku M
¨
akitalo, Petrus Kivi, Matias Koskela and Pekka J
¨
a
¨
askel
¨
ainen
Tampere University, Finland
Keywords:
Computer Graphics, Real-Time Rendering, Ray Tracing, Stereoscopic, Temporal Coherence, Reprojection,
Quality, Metrics.
Abstract:
Sample reprojection is a computationally inexpensive way of increasing the quality of real-time ray tracing,
where the number of samples that can be traced per pixel within the time budget is limited often to just
one. Stereoscopic rendering further doubles the amount of rays to be traced, although it exhibits significant
correlation not only temporally between frames, but also spatially between the viewpoints of the two eyes.
We explore various reprojection schemes taking advantage of these correlations, and propose to quantify their
contributions on the improved quality in terms of effective sample per pixel counts. We validate that sample
reprojection is an effective way of reducing the computational complexity of real-time stereoscopic ray tracing,
bringing potential benefits especially to lower-end devices.
1 INTRODUCTION
Real-time ray tracing is currently gaining significant
traction, due to modern hardware and state-of-the-art
software beginning to provide a means to achieve it
in practice. However, we are still limited to tracing
about one sample per pixel (1 spp), and rely on so-
phisticated post-processing filters for reconstructing
an acceptable quality result. With virtual reality and
augmented reality devices also becoming mainstream,
enabling stereoscopic real-time ray tracing is an im-
portant challenge for the near future. However, stere-
oscopy also implies that the computational costs are
roughly doubled, as we need to render a separate im-
age for both eyes.
Image and video data, whether it is natural or com-
puter generated imagery, usually exhibits correlation
between the pixels in both spatial and temporal do-
mains: the scene can contain similar structures in dif-
ferent parts of the same frame (spatial self-similarity),
and successive frames often differ only slightly due to
a small movement of the camera or the movement of
objects in the scene (temporal coherence). In stereo-
scopic data, spatial correlation also manifests itself
between the two eyes, as we are observing the scene
from two different viewpoints at the same time in-
stant.
A common way to reduce the computational com-
plexity of ray tracing, as well as rasterization, is to re-
project already rendered samples into new locations,
based on our knowledge of the movement and other
parameters of the virtual camera. Often we can also
utilize auxiliary data, such as information about the
depth, normals, or world positions of the scene. We
can reproject samples both temporally, i.e., using data
from previous frame(s), and spatially, e.g., from the
viewpoint of one eye to the viewpoint of the other eye.
Some of the challenges of spatiotemporal sample
reprojection include occlusions, non-diffuse shading
(i.e., a pixel whose colour may change in another
viewpoint), and that the reprojection mapping is gen-
erally non-bijective (i.e., many pixels may map onto
a single pixel in another viewpoint, and some pixels
may not have any pixel mapped to them from another
viewpoint) (Walter et al., 1999). Note that the term
”viewpoint” here may indicate either a temporally dif-
ferent frame, or another viewing direction from a dif-
ferent spatial angle at the same time instant (in our
case, the viewpoint of the other eye in a stereoscopic
scene).
We explore both spatial and temporal reprojection,
in an effort to validate their relevance and usefulness
in increasing the quality of stereoscopic real-time ray
tracing. We show that combining reprojection and
sparse ray tracing is an effective way of reducing the
computational complexity, as reprojecting a sample is
a very inexpensive operation compared to tracing a
ray for that sample (typically an order of magnitude
Mäkitalo, M., Kivi, P., Koskela, M. and Jääskeläinen, P.
Reducing Computational Complexity of Real-Time Stereoscopic Ray Tracing with Spatiotemporal Sample Reprojection.
DOI: 10.5220/0007692103670374
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 367-374
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
367

(a) Stereo
(b) Temporal
Figure 1: Pixels discarded by the reprojection algorithm in
(a) stereoscopically reprojected and (b) temporally blended
ray traced images: green for world position and cyan for
shading normal discards. Pixels reprojected outside of the
frame can be seen as red around the images.
cheaper). Moreover, we advocate a way of quantify-
ing the obtained improvements not only by the per-
centage of samples where ray tracing can be omit-
ted, but also more interestingly by the effective spp
of the result: how many samples per pixel would it
have taken to obtain the same quality with merely ray
tracing all samples. We also argue that this evalua-
tion method would be beneficial in bringing a more
complete understanding of the speed/quality tradeoffs
associated with various parts of a real-time ray trac-
ing framework in general; it is in no way restricted to
reprojection.
We specifically target the real-time 1 spp case, as
it is the scenario where sample reprojection arguably
provides the most tangible gains. In particular, repro-
jection accelerates the rendering by providing approx-
imate fast results when the balance of speed and qual-
ity is highly important; the quality could be further en-
hanced by various adaptive sparse sampling schemes
(Viitanen et al., 2018). In contrast, when the ray trac-
ing is not done in real time, the gains attained through
reprojection are less important: typically one would
then prefer to ray trace additional high quality sam-
ples at the cost of making an already slow rendering
process slower.
2 SAMPLE REPROJECTION
2.1 Temporal Reprojection
The concept of temporal coherence, that the contents
of successive frames do not usually change signifi-
cantly, can be traced back to at least the early 1970s,
when it was discussed in conjunction with visibility
determination (Sutherland et al., 1974). The follow-
ing decade saw several breakthroughs in the field of
ray tracing, with seminal works about recursive ray
tracing (Whitted, 1979), distributed effects such as
motion blur and depth of field (Cook et al., 1984), and
Monte Carlo style stochastic ray tracing (path trac-
ing) that computes global illumination through the
rendering equation (Kajiya, 1986). Soon after, an al-
gorithm for using temporal coherence to accelerate
ray tracing for motion picture production was intro-
duced in (Badt, 1988). Specifically, it gathered object
space information from the previous frame and then
estimated where the objects would be in the current
frame, thus performing forward sample reprojection.
This resulted in having to trace less than 40% of the
pixels in the current frame. The forward reprojection
approach was generalized in (Adelson and Hodges,
1995), where it was reported to yield up to 92% sav-
ings in rendering time.
In (Walter et al., 1999), a render cache was in-
troduced, which enabled interactive ray tracing for
low resolutions (about 8 frames per second for a
320×320 resolution). It builds an acceleration struc-
ture by caching previously rendered samples, storing
their colours and also the 3D data and shading infor-
mation. That allowed for various heuristics to be used
when reprojecting the samples onto the new frame,
such as comparing the depth data and colour contrast
for detecting holes, disocclusions, and other artifacts
(Wald and Slusallek, 2001). While the original render
cache still used forward reprojection, its concept of
storing the earlier data paved way for a backward re-
projection cache (also known as reverse reprojection),
introduced independently in (Nehab et al., 2007) and
(Scherzer et al., 2007).
Backward reprojection works by starting from the
current frame to be rendered instead of an earlier
frame, and for each pixel in the current frame deter-
mining its location in the earlier frame. If the pixel
was visible in the earlier frame and thus was stored in
the cache, it can potentially be reprojected onto the
current frame. Various heuristics can also be used
here in deciding whether to ultimately reproject the
found pixel or not, for instance based on the depth val-
ues or surface normals. While this backward mapping
simplifies the reprojection and mitigates the issue of
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
368

non-bijectivity, it does bring additional requirements
in terms of storing and handling past data in memory.
For further details and history about temporal co-
herence and reprojection, as well as for reviewing a
multitude of other ways of accelerating ray tracing
to an interactive/real-time level, we refer the reader
to (Wald and Slusallek, 2001) and (Scherzer et al.,
2012).
Nowadays reprojection is used by modern real-
time denoisers for stochastic sampling (Koskela et al.,
2019; Schied et al., 2018; Schied et al., 2017; Mara
et al., 2017), in order to generate a better quality input
before the actual denoising filter. Moreover, reprojec-
tion is used extensively in rasterized game graphics.
One of the most commonly used reprojection meth-
ods is called Temporal Anti-Aliasing (TAA) (Karis,
2014), which generates an anti-aliased image without
extra spatial samples. Instead, the temporal samples
are reprojected and used for smoothing the edges in
the image. With TAA, the camera is typically sub-
pixel jittered with a Halton sequence for achieving the
same smoothing effect even with a static camera.
2.2 Stereo Reprojection
In stereo reprojection, we reproject samples from one
spatial viewpoint to another at the same time instant.
In the standard stereoscopic case, the eyes can be
thought of as two distinct cameras that are separated
by approximately 6.5 centimeters (the eye separation
of an average human), and we reproject samples from
one camera’s viewpoint to the other.
There are two well-established methods for set-
ting up stereoscopic cameras: a parallel or sensor-
shift camera setup, where the two virtual cameras are
translated only horizontally, and a converged or toe-in
camera setup, which additionally introduces a slight
inward rotation for convergence. Converged camera
setups have been shown to produce visual distortions
such as keystoning (Woods et al., 1993), and thus par-
allel stereoscopic cameras are preferred for viewing
comfort (Allison, 2007).
Stereo reprojection can be thought of as a special
case of temporal reprojection (Adelson and Hodges,
1993). Specifically, if there is only camera move-
ment and the scene remains otherwise static, there is
no fundamental difference whether the camera move-
ment is interpreted as a change in viewpoint spatially
or temporally.
An early example of stereo reprojection (Ezell
and Hodges, 1990) built on the work of (Badt, 1988)
and combined it with a calculation of stereo dispar-
ity information in order to do the reprojection. With
their method, between 20% and 50% of the pixels
in the target frame needed to be ray traced after re-
projection. A more optimized method (Adelson and
Hodges, 1993) made a simplifying observation that
they could only reproject the x-coordinates of the
samples, based on an assumption that the observer’s
eyes are level (i.e., their head is not tilted). They ob-
tain an estimate of 93% reduction in the amount of
rays that need to be traced for the second eye, albeit
they do not address all problems related to the dispar-
ity between the two views (Ip et al., 1997).
A more general approach that does not assume
horizontally level eyes, introduced in (Ip et al., 1997),
leveraged coherence in the epipolar geometry of a
stereo image pair, subdividing the space with epipolar
planes; their algorithm ran in 30–50% of the time of
their comparison algorithm.
Reprojection based methods can also support ani-
mated rigid objects (Rosado, 2007). If there is a way
to compute the screen space motion vector for an an-
imated object, it can be both forward and backward
reprojected. The motion vectors can be computed for
common rigid body animations such as translation,
rotation and scaling.
With the modern rise in popularity of 3D con-
tent, stereoscopic ray tracing and reprojection algo-
rithms have also evolved to cover more general multi-
view synthesis; see, e.g., (Andersson et al., 2011)
and the references therein. However, as even mono-
scopic real-time ray tracing is only now becoming
tractable, enabling stereoscopic real-time ray tracing
remains a challenge for the near future. The recent
NVIDIA Turing architecture offers hardware acceler-
ation for rendering up to four views in a single render
pass, allowing discrepancy between the eyes also in
the y-coordinate, whereas the acceleration introduced
in their earlier Pascal architecture only supported two
views (implying a narrower field of view) and discrep-
ancy only in the x-coordinate, assuming horizontally
level eyes (Bhonde and Shanmugam, 2018). How-
ever, its potential in combination with their ray tracing
hardware is not detailed. Nevertheless, as we high-
light in this paper, sample reprojection provides one
practical way of reducing the computational complex-
ity of stereoscopic real-time ray tracing.
3 QUALITY EVALUATION
As seen in Section 2, the advantage of sample repro-
jection is often expressed in terms of the percentage
of saved rendering time, or especially in ray tracing,
as the percentage of reduction in the amount of traced
rays. While such statistics are useful and descriptive,
they do not convey information about the quality of
Reducing Computational Complexity of Real-Time Stereoscopic Ray Tracing with Spatiotemporal Sample Reprojection
369

the rendered result as such. We feel that the quality
aspect is generally overlooked whenever such figures
are reported, which can be due to several reasons.
First, when ray tracing was still exclusively a
method for non-real-time rendering, sample reprojec-
tion was applied simply to make the computation time
tolerable in the first place, but the long rendering pro-
cess was still continued until the resulting frame was
of high enough quality. Second, when sample repro-
jection is used within the rasterization pipeline, we
do not face a similar issue as in the path tracing ap-
proach, where individual samples are noisy and we
need to accumulate samples in order to decrease the
amount of noise.
However, even in the recent literature concerning
real-time ray tracing, we have not seen a rigorous
evaluation of how much sample reprojection actually
contributes to the quality of the final ray traced re-
sult, despite temporal reprojection being a relatively
widely used building block of real-time ray tracing
frameworks. In particular, we think that an intuitive
metric for measuring the quality improvement gained
through reprojection is to estimate what the effective
spp count of the reprojected result is. The effective
spp gives us simultaneously an indication of both the
quality and the reduction in computational complex-
ity.
To outline our approach, we reproject as many
samples onto the target frame as we can, and ray
trace only the missing samples where reprojection
was deemed unsuccessful. The target frame can have
existing data, on top of which we accumulate repro-
jected data and blend them together with a certain ra-
tio (e.g., for stable temporal accumulation, but stereo
accumulation can also be done), or the target frame
can be empty (e.g., reprojecting from one eye to an-
other). Then, through comparisons to a pristine refer-
ence that is ray traced with thousands of samples per
pixel, we can compute the spp of a purely ray traced
image that would effectively yield the same error as
the reprojected image. The error can be evaluated by
common error metrics, such as root mean square er-
ror (RMSE), or the structural similarity index (SSIM)
(Wang et al., 2004), or more sophisticated metrics.
While it can be argued that RMSE and SSIM do
not adequately correspond to the complex subjective
evaluation done in the human visual system, they per-
sist as widely used metrics due to their relative sim-
plicity. Moreover, we think that the choice of the met-
ric is not critical in our case, as we aim to measure the
relative differences between different quality images
instead of concentrating on absolute quantities indi-
cated by the metrics.
4 EXPERIMENTS
We evaluate the effects of spatiotemporal sample re-
projection for seven stereoscopic test scenes, each
having 60 frames with 720p resolution for each eye,
and a moving observer (i.e., moving camera). As a
baseline, we have three diffuse scenes (Sponza, Liv-
ing Room, and Classroom) with static lighting. In or-
der to consider more varied conditions, we also in-
vestigate the Sponza and Living Room scenes with
glossy materials, and with a moving light source. Fig-
ure 2 shows an example 4096 spp reference frame of
each static light scene; the moving light versions of
Sponza and Living Room are done on top the scenes
in Figure 2a and Figure 2b, respectively.
4.1 Implementation
In the stereo reprojection for each individual frame,
we first path trace the complete right-eye image with
1 spp (using one primary ray, one secondary ray, and
two shadow rays). At this point, we do not have
any path traced data for the left-eye image. How-
ever, we do assume that we have access to the depth
and shading normal buffers of both eyes via the ren-
derer, so that we can choose which pixels to discard
in the reprojection step in order to avoid ghosting ar-
tifacts. Specifically, we sample the depths and shad-
ing normals of both current and previous frame, and
also compute the 3D world space positions from these
depths, which can be done since we know the camera
parameters of both frames. Then the differences of
the two world positions and shading normals are com-
pared. Higher differences than scene-specific limit
values mean that there has been an occlusion and we
need to discard the history data; the current 1 spp path
traced input is then directly used as the output of those
pixels. The scene-specific limits used in our measure-
ments were each decided based on the scale of the
particular scene.
Then, we want to reproject as much of the right-
eye data as possible into the thus far empty left-eye
image, so we apply backward reprojection for each
pixel in the target left-eye image, hence filling n%
of the left-eye image with spatially reprojected 1 spp
data. The missing (100 − n)% of the pixels in the
left-eye image, where the reprojected sample was dis-
carded, are finally path traced with 1 spp. Note that
the difference in reprojecting from right eye to left eye
or vice versa is trivial; our choice of reprojecting from
right eye to left eye is arbitrary. Mixing both repro-
jection directions could also be considered for a more
advanced implementation.
For temporal reprojection, we accumulate data
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
370

(a) Sponza (b) Living Room (c) Sponza (Glossy)
(d) Living Room (Glossy) (e) Classroom
Figure 2: 4096 spp references of the scenes used in the experiments. Scenes (a) and (b) are also used as a base for Sponza
(Moving Light) and Living Room (Moving Light), respectively.
from earlier frames with a 20% blending ratio, i.e.,
weighing the existing accumulated data with a factor
of 0.8, and combining it with the newest reprojected
frame with a weight factor of 0.2. We found this ratio
to provide a good balance between keeping the frame
sequence temporally stable and incorporating newly
acquired data, while also keeping the implementation
simple. However, a content-aware heuristic for decid-
ing the ratio per scene could also be considered, as
well as one dependent on the camera movement.
We measure the effective spp counts as detailed in
Section 3 in terms of RMSE; for the RMSE value ob-
tained for each frame, we find the n and n + 1 spp
datasets, between whose corresponding RMSE val-
ues the obtained RMSE lies, and interpolate the ef-
fective spp based on that. The measurements are done
for stereo reprojection and temporal reprojection sep-
arately, and also with both reprojection methods com-
bined; in the combined case, we first apply temporal
reprojection to the right eye, after which the stereo re-
projection is done from right eye to left eye, and the
resulting left-eye quality is evaluated. Note that in this
case we also need to temporally accumulate left-eye
data in order to fill the discarded pixels with accumu-
lated data.
While backward reprojecting data from the right
eye to the left eye, we use bilinear interpolation to
decide how the four closest pixels in the right eye
contribute to the reprojected pixels in the left eye, as
the pixels don’t align perfectly after the reprojection.
We discard invalid samples based on depth and shad-
ing normal values and give weights to the remaining
samples according to their linear distance from the
reprojected left eye pixel’s center. We use the same
sampling scheme for temporal reprojection, where the
data is now backward reprojected from the current
right eye viewpoint to a future right eye viewpoint.
We found bilinear interpolation to give visually and
metrically more pleasing results compared to nearest
neighbour sampling, where only the closest right eye
pixel is sampled. This is due to the fact that bilin-
ear interpolation acts as a simple denoiser against the
stochastic noise introduced by path tracing.
4.2 Results
Table 2 presents the effective spp counts for all
datasets, and for all three reprojection options (stereo,
temporal, and stereo + temporal). The average spp is
taken over all 60 frames, and the framewise minimum
and maximum spp counts are also reported. For stereo
reprojection, we obtain approximately 1.6 spp for all
datasets, with minor variance between frames.
For temporal reprojection, the results are more de-
pendent on the scene contents and the particular cam-
era movements: the average spp counts range from
approximately 7 spp to 12.5 spp, which is a significant
improvement in quality even in the worst case. In gen-
eral, we see that the Sponza scenes are more difficult,
which is likely due to them having more complex ge-
ometry in the new data entering the frame as the cam-
era moves. The minimum effective spp is 1, as there
is no previous data to reproject on the first frame. It
takes about 5–10 frames for the temporal reprojec-
tion to initially reach a stable spp, as seen also in the
framewise spp graph for Sponza in Figure 3; the con-
vergence speed is dependent on the temporal blend-
ing ratio. The combined stereo+temporal reprojection
Reducing Computational Complexity of Real-Time Stereoscopic Ray Tracing with Spatiotemporal Sample Reprojection
371
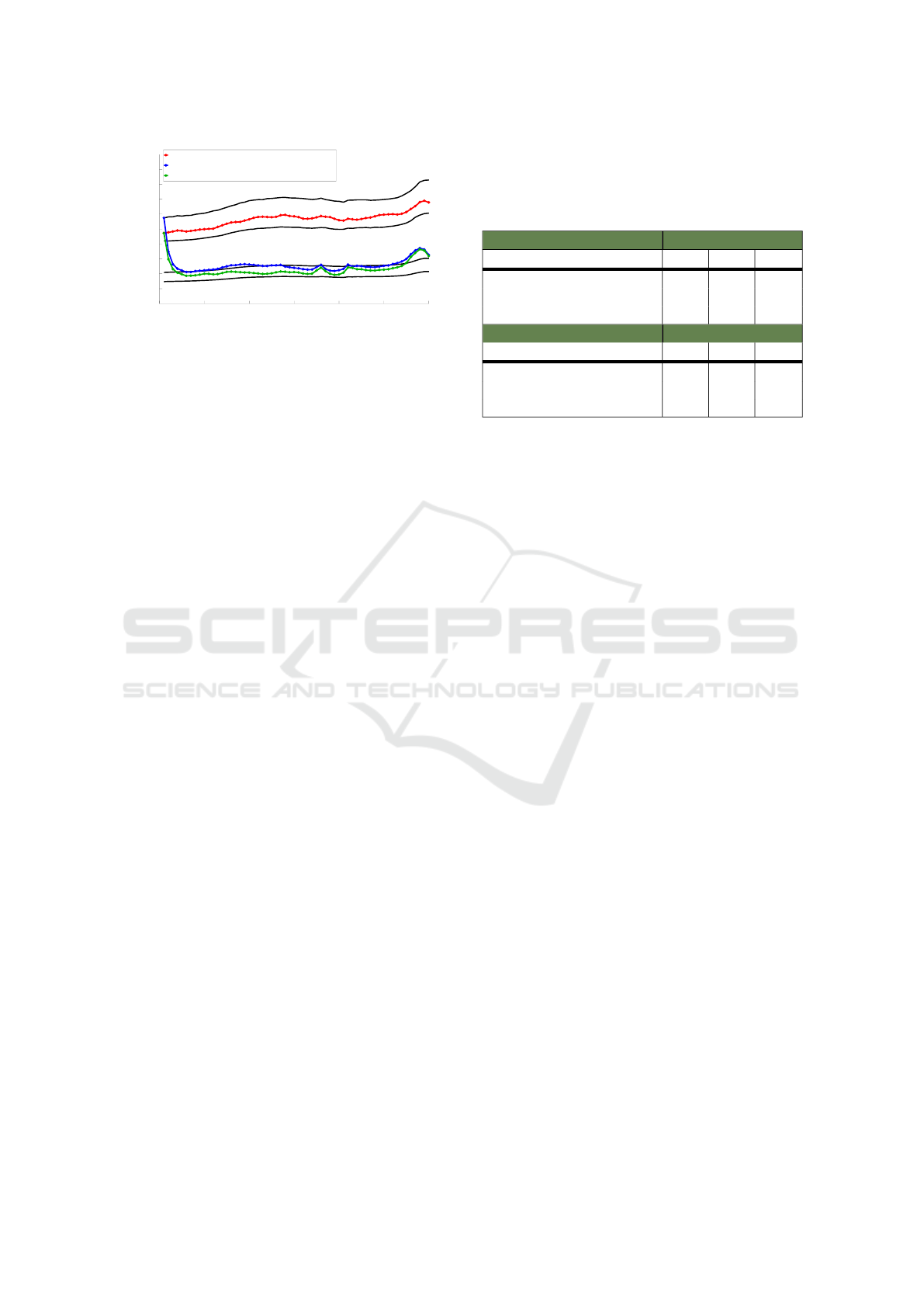
0 10 20 30 40 50 60
Frame
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
RMSE
1 spp
2 spp
8 spp
16 spp
Stereo reprojection of 1 spp
Temporal reprojection of 1 spp
Stereo+temporal reprojection of 1 spp
Figure 3: Sponza dataset: Framewise RMSE values of the
reprojected frames, and of comparison data having 1 spp,
2 spp, 8 spp and 16 spp.
expectedly yields the best spp counts for all datasets,
with averages ranging from about 9 spp to 18 spp.
These clearly demonstrate that reprojection is a pow-
erful method despite its simplicity. However, more
research is needed for evaluating the performance in
more dynamic conditions, such as in a virtual reality
environment with the user constantly looking around
in the scene; in our datasets, the camera movement
is either smoothly curved panning (Living Room and
Classroom), or smoothly curved backward movement
(Sponza).
Moreover, Table 1 shows how many percent of the
samples were discarded on average; those samples are
the ones that need to be path traced in the target frame
after the reprojection. Thus, we see that with stereo
reprojection, only 2–4% of the samples have to be
path traced for the left eye on average, while the re-
sulting quality is still 60% higher at 1.6 spp than what
normal 1 spp path tracing would yield. For tempo-
ral reprojection, we observe discard rates of 1.5–4%;
again, we notice that more samples are discarded in
the Sponza sets due to the complex geometry. Fig-
ure 1 visualizes the discarded pixels for an example
frame of Living Room.
Figure 4 shows an example frame comparison of
Classroom with the 1 spp original data, 4096 spp ref-
erence, 16 spp reference, and the reprojected result
with an effective 16.38 spp. We see that the quality
of the reprojection matches the 16 spp reference quite
well also visually, although it exhibits some artifacts
on the rightmost part where new data has just entered
the frame and temporal accumulation has not yet had
enough data to smooth it out.
5 CONCLUSIONS
We explored stereoscopic and temporal sample repro-
jection in the context of real-time ray tracing. We in-
vestigated the quality improvements and the reduction
Table 1: Percentage of discarded pixels after temporal
and stereoscopic reprojection with depth, world position
and shading normal checking. The average, minimum
and maximum for stereo (N=60 frames) and temporal
(N=59 frames) discard percentages are shown.
Stereo
Avg Min Max
Sponza (All scenes) 2.01 1.24 2.96
Living Room (All scenes) 2.50 2.31 2.72
Classroom 4.36 3.58 5.91
Temporal
Avg Min Max
Sponza (All scenes) 3.96 3.57 4.46
Living Room (All scenes) 1.48 0.70 2.27
Classroom 2.19 1.52 2.97
in computational complexity associated with repro-
jection, and proposed to use the effective spp count
as a descriptive metric for them. To substantiate our
standpoint, we provided experimental results quan-
tifying the relative contributions of reprojection in
terms of effective spp. The metric and the concept of
effective spp is not limited to reprojection, but could
also be used to more rigorously assess the relative
contributions of other components in a real-time ray
tracing framework. We think the proposed approach
would be beneficial in evaluating these various com-
ponents and understanding the compromises between
speed and quality associated with them, and thus be-
ing able to make more informed choices when design-
ing and optimizing the frameworks.
In practical real-time applications, reprojection is
typically combined with more sophisticated denoising
filters for high quality results. The rendering could
be further accelerated with adaptive sparse sampling
schemes. Such topics remain a subject of future in-
vestigation, as well as considering adaptive blending
ratios, especially for fast-paced scenarios like games.
ACKNOWLEDGEMENTS
This work is supported by Business Finland (funding
decision 40142/14, FiDiPro-StreamPro), Academy of
Finland (funding decisions 297548, 310411), EC-
SEL JU project FitOptiVis (project number 783162),
and the Tampere University of Technology Graduate
School.
REFERENCES
Adelson, S. J. and Hodges, L. F. (1993). Stereoscopic ray-
tracing. The Visual Computer, 10(3):127–144.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
372

(a) 1 spp (b) 16 spp
(c) 4096 spp (d) Reprojected
Figure 4: Different spp counts (a,b,c) in the Classroom scene compared to the stereoscopically and temporally reprojected
and blended 1 spp (d), whose effective spp is 16.38 spp.
Table 2: Effective spp after three different reprojection schemes, as measured by RMSE. The average spp is taken over all 60
frames, with the respective framewise minimum and maximum spp counts also shown.
Stereo Temporal Stereo + temporal
Avg Min Max Avg Min Max Avg Min Max
Sponza 1.63 1.55 1.71 7.69 1.00 10.44 10.07 1.66 13.48
Living Room 1.61 1.55 1.64 12.76 1.00 14.36 18.22 1.62 20.94
Sponza (Glossy) 1.58 1.33 1.82 7.97 1.00 11.25 10.09 1.68 15.24
Living Room (Glossy) 1.63 1.48 1.69 11.27 1.00 12.93 16.63 1.61 19.80
Sponza (Moving Light) 1.59 1.48 1.65 6.92 1.00 8.82 8.65 1.57 11.59
Living Room (Moving Light) 1.61 1.55 1.65 11.40 1.00 12.83 15.45 1.62 17.98
Classroom 1.60 1.54 1.64 10.83 1.00 14.30 16.50 1.58 19.55
Adelson, S. J. and Hodges, L. F. (1995). Generating ex-
act ray-traced animation frames by reprojection. IEEE
Computer Graphics and Applications, 15(3):43–52.
Allison, R. (2007). Analysis of the influence of vertical dis-
parities arising in toed-in stereoscopic cameras. Jour-
nal of Imaging Science and Technology, 51(4):317–
327.
Andersson, M., Johnsson, B., Munkberg, J., Clarberg, P.,
Hasselgren, J., and Akenine-M
¨
oller, T. (2011). Effi-
cient multi-view ray tracing using edge detection and
shader reuse. The Visual Computer, 27(6-8):665.
Badt, S. (1988). Two algorithms for taking advantage of
temporal coherence in ray tracing. The Visual Com-
puter, 4(3):123–132.
Bhonde, S. and Shanmugam, M. (2018). Tur-
ing Multi-View Rendering in VRWorks.
https://devblogs.nvidia.com/turing-multi-view-
rendering-vrworks Accessed 16th of January 2019.
Cook, R. L., Porter, T., and Carpenter, L. (1984). Dis-
tributed ray tracing. In ACM SIGGRAPH computer
graphics, volume 18, pages 137–145. ACM.
Ezell, J. D. and Hodges, L. F. (1990). Some preliminary
results on using spatial locality to speed up ray tracing
of stereoscopic images. In Stereoscopic Displays and
Applications, volume 1256, pages 298–307. Interna-
tional Society for Optics and Photonics.
Ip, H. H., Law, K. C., and Fung, G. K. (1997). Epipo-
lar plane space subdivision method in stereoscopic ray
tracing. The Visual Computer, 13(6):247–264.
Kajiya, J. T. (1986). The rendering equation. In ACM
Siggraph Computer Graphics, volume 20, pages 143–
150. ACM.
Reducing Computational Complexity of Real-Time Stereoscopic Ray Tracing with Spatiotemporal Sample Reprojection
373

Karis, B. (2014). High-quality temporal supersampling.
Advances in Real-Time Rendering in Games, SIG-
GRAPH Courses.
Koskela, M., Immonen, K., M
¨
akitalo, M., Foi, A., Viitanen,
T., J
¨
a
¨
askel
¨
ainen, P., Kultala, H., and Takala, J. (2019).
Blockwise multi-order feature regression for real-time
path tracing reconstruction. Provisionally accepted to
ACM Transactions on Graphics (TOG).
Mara, M., McGuire, M., Bitterli, B., and Jarosz, W. (2017).
An efficient denoising algorithm for global illumina-
tion. In Proceedings of High Performace Graphics.
ACM.
Nehab, D., Sander, P. V., Lawrence, J., Tatarchuk, N., and
Isidoro, J. R. (2007). Accelerating real-time shading
with reverse reprojection caching. In Graphics hard-
ware, volume 41, pages 61–62.
Rosado, G. (2007). GPU Gems 3, chapter 27. Motion Blur
as a Post-Processing Effect. Addison-Wesley Profes-
sional.
Scherzer, D., Jeschke, S., and Wimmer, M. (2007). Pixel-
correct shadow maps with temporal reprojection and
shadow test confidence. In Proceedings of the 18th
Eurographics conference on Rendering Techniques,
pages 45–50. Eurographics Association.
Scherzer, D., Yang, L., Mattausch, O., Nehab, D., Sander,
P. V., Wimmer, M., and Eisemann, E. (2012). Tem-
poral coherence methods in real-time rendering. In
Computer Graphics Forum, volume 31, pages 2378–
2408. Wiley Online Library.
Schied, C., Kaplanyan, A., Wyman, C., Patney, A., Chai-
tanya, C. R. A., Burgess, J., Liu, S., Dachsbacher,
C., Lefohn, A., and Salvi, M. (2017). Spatiotempo-
ral variance-guided filtering: real-time reconstruction
for path-traced global illumination. In Proceedings of
High Performance Graphics, page 2. ACM.
Schied, C., Peters, C., and Dachsbacher, C. (2018). Gra-
dient estimation for real-time adaptive temporal filter-
ing. Proceedings of the ACM on Computer Graphics
and Interactive Techniques, 1(2):24.
Sutherland, I. E., Sproull, R. F., and Schumacker, R. A.
(1974). A characterization of ten hidden-surface algo-
rithms. ACM Computing Surveys (CSUR), 6(1):1–55.
Viitanen, T., Koskela, M., Immonen, K., M
¨
akitalo, M.,
J
¨
a
¨
askel
¨
ainen, P., and Takala, J. (2018). Sparse sam-
pling for real-time ray tracing. In Proceedings of the
13th International Joint Conference on Computer Vi-
sion, Imaging and Computer Graphics Theory and
Applications, volume 1, pages 295–302.
Wald, I. and Slusallek, P. (2001). State of the art in inter-
active ray tracing. State of the Art Reports, EURO-
GRAPHICS, 2001:21–42.
Walter, B., Drettakis, G., and Parker, S. (1999). Interac-
tive Rendering using the Render Cache. In Lischin-
ski, D. and Larson, G., editors, Rendering techniques
’99 (Proceedings of the 10th Eurographics Workshop
on Rendering), volume 10, pages 235–246, Granada,
Spain. Springer-Verlag/Wien.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visi-
bility to structural similarity. IEEE Transactions on
Image Processing, 13(4):600–612.
Whitted, T. (1979). An improved illumination model
for shaded display. In ACM SIGGRAPH Computer
Graphics, volume 13, page 14. ACM.
Woods, A. J., Docherty, T., and Koch, R. (1993). Image
distortions in stereoscopic video systems. In Stereo-
scopic displays and applications IV, volume 1915,
pages 36–49. International Society for Optics and
Photonics.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
374
