
Camera Tampering Detection using Generative Reference Model and
Deep Learned Features
Pranav Mantini and Shishir K. Shah
Department of Computer Science, University of Houston,
4800 Calhoun Road, Houston, Texas, U.S.A.
Keywords:
Surveillance, Camera, Tampering Detection, Generative Adversarial Network, Siamese Network, Deep
Learning, Surveillance Data.
Abstract:
An unauthorized alteration in the viewpoint of a surveillance cameras is called tampering. This involves
comparing images from the surveillance camera against a reference model. The reference model represents
the features (e.g. background, edges, and interest points) of the image under normal operating conditions. The
approach is to identify a tamper by analysing the distance between the features of the image from surveillance
camera and from the reference model. If the distance is not within a certain threshold, the image is labeled
as a tamper. Most methods have used images from the immediate past of the surveillance camera to construct
the reference model. We propose to employ a generative model that learns the distribution of images from the
surveillance camera under normal operating conditions, by training a generative adversarial network (GAN).
The GAN is capable of sampling images from the probability density function, which are used as reference. We
train a Siamese network that transforms the images into a feature space, so as to maximize the distance between
the generated images and tampered images (while minimizing the distance between generated and normal
images). The distance between the generated and the surveillance camera image is classified as either normal
or tampered. The model is trained and tested over a synthetic dataset that is created by inducing artificial
tampering (using image processing techniques). We compare the performance of the proposed model against
two existing methods. Results show that the proposed model is highly capable of detecting and classifying
tampering, and outperforms the existing methods with respect to accuracy and false positive rate.
1 INTRODUCTION
An unauthorized alteration in the viewpoint of a sur-
veillance camera is called tampering. This can occur
due to natural phenomena, for example, the lens can
accumulate dust, it can lose focus, and its view point
can shift (due to strong winds). Camera tampering
can also be induced to accomplish malicious activi-
ties (like theft and property damage). Examples of
such incidents include spray painting, blocking, and
changing the view of the camera (with hand). Tampe-
ring detection concerns with identifying these events
by analyzing the video from camera.
Detecting camera tampers safeguards security and
enables forensic analysis. Today, surveillance ca-
meras are affordable and are deployed ubiquitously.
For example, universities have hundreds of came-
ras, international airports and casinos have thousands
of cameras. They are usually deployed across the
infrastructure to yield a wide coverage, and ensu-
ring their functionality requires a continual review
process. Currently, humans (security officers) per-
form a routine review of the surveillance cameras,
but this is a tedious task, which is prone to error.
Properly functioning cameras is an assumption for
computer vision algorithms, such as tracking (Man-
tini and Shah, 2016b), re-identification (Mantini and
Shah, 2015; Bedagkar-Gala and Shah, 2014), and mo-
tion prediction (Mantini and Shah, 2014; Mantini and
Shah, 2016a).
Detecting tampers is a challenging problem. Sur-
veillance cameras are expected to operate under vari-
ous illumination and weather conditions, they are uti-
lized in monitoring a variety of scenes, and they have
limited access to compute power. As such, the abi-
lity to detect camera tampering requires an approach
that can function successfully under varying conditi-
ons, irrespective of scene complexity while limiting
false alarms and utilize minimal resources.
Camera tampering detection can be mapped to the
problem of change detection, which aims at identi-
fying abrupt changes in dynamic systems (Willsky,
Mantini, P. and Shah, S.
Camera Tampering Detection using Generative Reference Model and Deep Learned Features.
DOI: 10.5220/0007392100850095
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 85-95
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
85
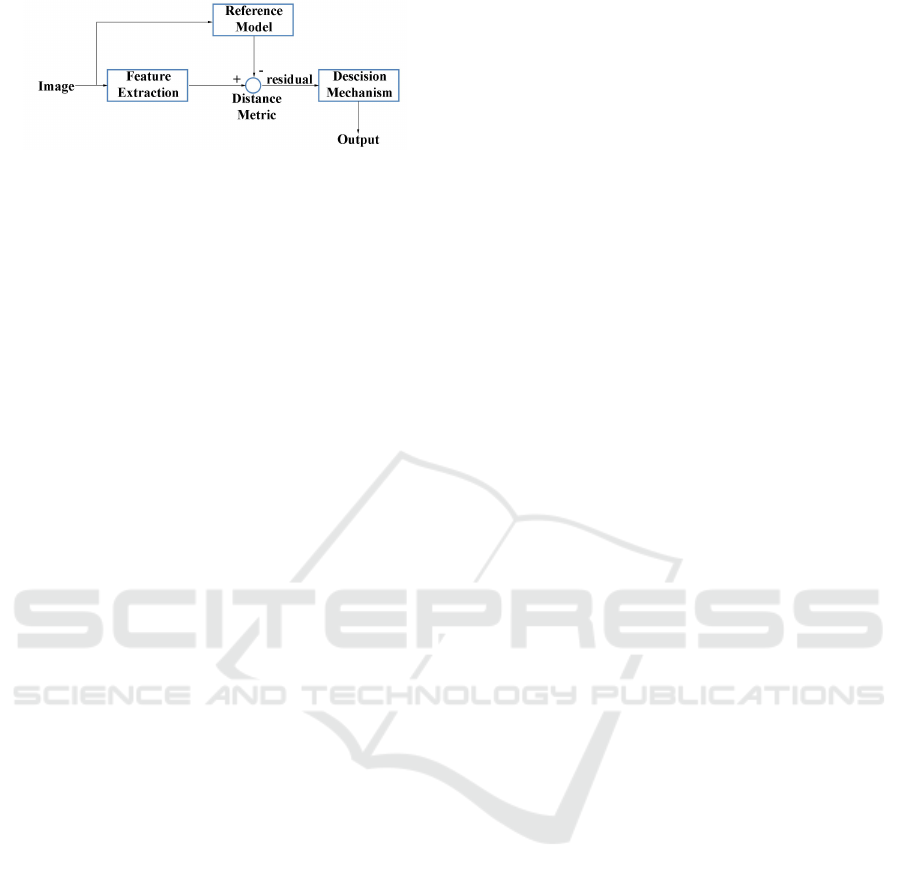
Figure 1: Residual based structure for detecting tampering.
1985). Willsky et al. (Willsky, 1985) proposed a resi-
dual based structure for detecting abrupt changes (See
Figure. 1). Most methods for detecting tampering can
be described using a similar structure. The framework
depicts the idea that certain features of the image re-
main constant under normal operating conditions of
the surveillance camera. A large deviation in this fe-
ature is associated with a tampering. The reference
model provides the features under normal operating
conditions that are compared against the feature from
a test image, and a large distance between them is
used to detect a tamper.
The feature extraction step isolates the features
from image that the framework assumes to be con-
stant under normal operating conditions. Some re-
searchers have worked with the assumption that it is
the background that remains unchanged, others have
assumed that it is the edges, and yet a few assumed
that it is the interest points (like corners). Existing
methods for tampering detection can be organized as
background, edge, and interest point modeling met-
hods. Unlike the existing methods that use handcraf-
ted features, we propose to learn features from the
data for tampering detection. Recently, researches
have found success in training CNNs to detect visibi-
lity loss (Ivanov and Yudin, 2019), and detecting color
and intensity based abnormality (Dong et al., 2016).
We propose a deep learning approach with extended
ability to detect covered, defocussed, and moved tam-
per. While existing methods use images information
from the immediate past as reference, we propose to
learn the probability distribution of normal images,
and sample from it to generate reference images. To
compute a residual, existing methods have compared
statistical measures such as mean, histogram, and en-
tropy computed over the features of the test and re-
ference image. We propose to transform the test and
reference image to a new features space, and perform
classification in this feature space to discriminate tam-
pered from the normal images. To summarize, the
contributions of this paper are:
1. Training a generative adversarial network to sam-
ple reference images from a complex probability
density function.
2. Training a Siamese network to distinguish normal
images from tampered images.
3. Training and evaluating performance of tampe-
ring detection on synthetic data.
2 RELATED WORK
This section describes the existing work with respect
to each module in the framework.
2.1 Feature Extraction
Tampering detection can be organized as background,
edge, and interest point modeling methods.
Background Modeling: Background refers to the
elements of a scene that do not undergo motion. Many
a method have leveraged this idea to model back-
ground as a feature for detecting tampers. Back-
ground can be modeled using efficient frame diffe-
rencing (Collins et al., 2000; Aksay et al., 2007;
Saglam and Temizel, 2009; Kryjak et al., 2012; Gu-
ler et al., 2016), mixture of Gaussians’ (Czyzew-
ski and Dalka, 2008; Ellwart et al., 2012), and code
books (Tung et al., 2012; Kim et al., 2005).
Huang et al. (Huang et al., 2014) used the abso-
lute difference between the reference and test back-
ground to compute a residual for detecting moved and
covered tampers. Saglam et al. (Saglam and Temi-
zel, 2009) modeled two backgrounds separated by a
time delay to compute the residual. The first was used
as a reference and the latter as the test image for de-
tecting moved tampers. Ellwart et al. (Ellwart et al.,
2012) computed the entropy of the two backgrounds
and used the difference as a residual to detect covered
tampering. Akshay et al. (Aksay et al., 2007) and ot-
hers (Saglam and Temizel, 2009; Huang et al., 2014;
Guler et al., 2016) have computed the histogram and
used the concentration in the lower intensity bins of
the histogram as a feature. The difference in concen-
trations of the reference and the test images, is used
as a residual to detect covered tampering.
Edge Modeling: Edges correlate with sharp intensity
changes in the image. Edges can be computed using
pixel-wise gradient (Mantini and Shah, 2017; Ha-
rasse et al., 2004; Tsesmelis et al., 2013); spatial fil-
ters like Sobel (Gaibotti et al., 2015; Lee et al., 2015;
Huang et al., 2014; Shih et al., 2013; Raghavan et al.,
2012; Ellwart et al., 2012; Ribnick et al., 2006) and
Prewitt; frequency filters like Gaussian high pass fil-
ter (Guler et al., 2016; Saglam and Temizel, 2009;
Huang et al., 2014); and robust edge detection met-
hods like canny edge detector (Lee et al., 2014; Wang
et al., 2014; Lin and Wu, 2012; Ellwart et al., 2012;
Wang et al., 2011; Sidnev et al., 2018). A camera
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
86

operating out-of-focus has indistinct edges. A camera
that is covered or moved, results in disappearance of
edges that are present in the reference image. Lin and
Wu (Lin and Wu, 2012) used the intersection of edges
between the test and reference image to compute a re-
sidual, and detect covered and moved tampers. Defo-
cussing degrades edge content. Gaibotti et al. (Gai-
botti et al., 2015), Mantini and Shah (Mantini and
Shah, 2017) used pixel wise gradient to filter the edge
content. Difference between the accumulated magni-
tude of the gradients is used as a residual (Gil-Jim
´
enez
et al., 2007; Wang et al., 2011; Huang et al., 2014).
High frequency content in an image correspond to the
sharp changes in the image. Saglam et al. (Saglam
and Temizel, 2009) and Akshay et al. (Aksay et al.,
2007) accumulated the co-efficient of high frequency
components as a feature. Wavelet transform is app-
lied to obtain the frequency content in the image. Hu-
ang et al. (Huang et al., 2014) and Guler et al. (Guler
et al., 2016) followed a similar approach by applying
discrete Fourier transform. Harasse et al. (Harasse
et al., 2004) and Jiminez et al. (Gil-Jim
´
enez et al.,
2007) used the entropy of the edges as a feature for
detecting covered tampering. The features described
so far, quantify the magnitude of gradients/edges in
the image. Ribneck et al. (Ribnick et al., 2006) used
histogram of oriented gradients (HOG) as a feature.
This captures the orientation of gradient as well. The
sum of absolute difference between the HOGs of re-
ference and test image is used as a residual.
A combination of background and edges can be used
to extract robust features. Lee et al. (Lee et al., 2014;
Lee et al., 2015) applied edge detection on the back-
ground image and used it as a feature for detecting
tampering. Saglam et al. (Saglam and Temizel, 2009)
used the high frequency content of the background
image as a feature for detecting defocussing.
Interest Points Modeling: These methods assumes
that the location of interest points in the image remain
fixed under normal operating conditions. SIFT (Scale
invariant Feature Transform) and SURF (Speeded
Up Robust Features) are common algorithms used to
identify keypoints in reference and test images. A re-
sidual is computed by comparing the two sets of in-
terest points. Tsesmelis et al. (Tsesmelis et al., 2013)
used the difference in number of interest points as a
residual. Yin et al. (Yin et al., 2013) used SIFT based
image descriptors as a feature, and the difference bet-
ween them is used as a residual for detecting covered
and moved tampers. Javadi et al. (Javadi et al., 2015)
estimated the global motion by matching SIFT points
between the reference and test image. The displace-
ment is used as a residual to detect moved tampers.
2.2 Reference Model
The reference model generates the expected feature
under normal operating conditions. Residual is com-
puted by comparing this against the features of test
image. The input to reference model is usually a set of
images. The reference image ideally represent the ca-
mera under normal operating conditions. This data is
not available. A general strategy is to assume tempo-
ral constancy. Under this assumption, frames from the
immediate past are used as reference images. A com-
mon technique is to use a linear combination of the
reference images to arrive at a reference value. This
technique allows the system to adapt with naturally
occurring illumination changes, like dusk, dawn, and
etc. For example, Jimenez et al. (Gil-Jim
´
enez et al.,
2007; Ellwart et al., 2012; Aksay et al., 2007; Saglam
and Temizel, 2009; Huang et al., 2014) updated the
background reference image using a moving average
model, and Wang et al. (Wang et al., 2011; Lin and
Wu, 2012; Ellwart et al., 2012; Harasse et al., 2004)
accumulated the edges over a set of frames to form
reference edges.
Assuming temporal constancy has disadvantages.
If images in the immediate past are tampered, then
the model accumulates these features as well. The
model drifts and fails to detect tampering. Adversely,
the system falsely identifies normal frames as tampe-
red. Selectivity is a common technique to avoid this,
where frames identified as normal are selectively in-
cluded in the model. However, performance of the
system is contingent on its ability to detect tampe-
ring. In this paper, we overcome this disadvantage
by proposing a generative model for estimating re-
ference images. Until recently, it has been difficult
to learn the probability density function of the ima-
ges captured by a surveillance camera. Hence, ge-
nerative models are not commonly practiced. Howe-
ver, with the recent advancement in training complex
deep neural network architectures, it is possible to le-
arn such distributions. Goodfellow et al. (Goodfellow
et al., 2014) proposed a generative adversarial training
scheme that can learn probability density function of
the features. Generative adversarial network (GAN)
is a neural network architecture that is capable of sam-
pling features from the learned probability density
function. Redford et al. (Radford et al., 2015) brid-
ged the gap between GAN and convolutional neural
networks (CNN) using deep convolutional generative
adversarial network that is capable of learning a hier-
archy of representations from an image dataset. This
is capable of generating images with visual simila-
rity to the training images. GANs have found applica-
tions in multiple facets. They have shown to enhance
Camera Tampering Detection using Generative Reference Model and Deep Learned Features
87
resolution (Ledig et al., 2017), create images from
text (Zhang et al., 2017), generate face images (Gau-
thier, 2014), and generate CT images form MRI (Nie
et al., 2017). We explore its applicability pertaining
to surveillance video.
2.3 Detection Mechanism
The detection mechanism analyzes the distance bet-
ween features of the reference image and test image;
and labels the image as either tampered or normal.
It takes as input a residual value and maps it to a
decision. A linear decision boundary using a thres-
holding scheme has been the norm (Saglam and Te-
mizel, 2009; Gil-Jim
´
enez et al., 2007; Wang et al.,
2011; Lin and Wu, 2012; Ellwart et al., 2012; Aksay
et al., 2007). Some methods have proposed multi-
ple thresholds (Huang et al., 2014). Lee et al. (Lee
et al., 2014) proposed an adaptive threshold, produ-
cing a non-linear boundary to cope with the complex-
ity. However, a thresholding mechanism has limita-
tions; A parameter tuning is required to choose an
appropriate threshold. A non-linear decision making
capability is required to cope with the complexity of
surveillance camera. We propose to use a Siamese
network (Bromley et al., 1994) as a detection mecha-
nism. This allows us to create a non-linear mapping
(transformation) of the input to a new feature space.
The network takes as input two images and minimizes
the distance between transformed features of normal
image, while maximizing the distance between trans-
formed features of the tampered, and normal images.
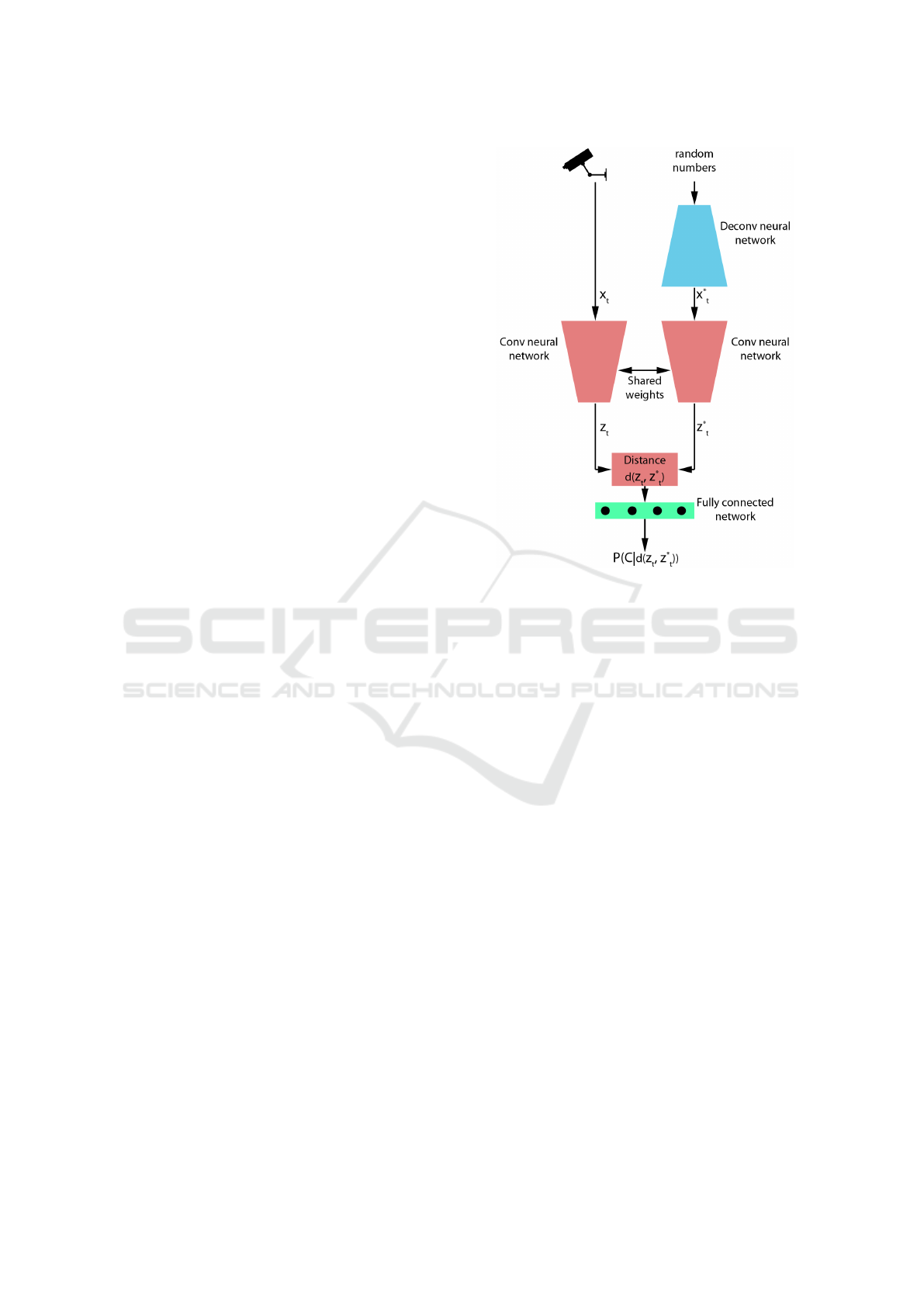
3 PROPOSED SOLUTION
The proposed solution is depicted in Figure 2. It con-
sists of
• A deconvolutional neural network (generator).
• A pair of convolutional neural network (CNN)
with shared weights (Siamese network).
• A fully connected neural network.
The generator takes as input a vector of random num-
bers. It generates an image that represents surveil-
lance camera under normal operating condition. The
image from camera at time t along with the genera-
ted image, are used as input to the pair of CNNs that
share weights. This stage acts as a feature extractor
for the generated and test images. The distance be-
tween transformed features are input to a fully con-
nected neural network. The output is a posterior value
estimating the probability of choosing class C given
the distance between two inputs.
Figure 2: Proposed framework for camera tampering de-
tection.
3.1 Generator as a Reference Model
The generator maps a latent space to a particular data
distribution. It is a deconvolutional neural network
composed of sequence of upsampling layers with in-
termittent non-linear activation layers. We train it
to map the latent space to the distribution of ima-
ges under normal operating condition. We train the
network in an adversarial fashion. The generator is
contended against another convolutional neural net-
work, referred to as the discriminator (see Figure.3).
The generator and the discriminator are involved in
a zero-sum game. The generator aims at creating
images that are visually similar to training example,
while the discriminator aims at distinguishing the ge-
nerated image from the original training image. The
generator and discriminator are trained alternatively
by back-propagating the error. Generative adversarial
networks (GAN) have gained popularity in the recent
past. We direct interested readers to Goodfellow et
al. (Goodfellow et al., 2014) and Radford et al. (Rad-
ford et al., 2015) for a detailed description.
Consider G is the generator function and x
∗
be a
sample from the generator, such that x
∗
= G(y), where
y ∼ p
y
, and p
y
is a uniform distribution. Now, let
us consider a discriminator (D), goal of which is to
distinguish x
∗
from x, where x is an image from the
camera. Assume that D assigns a high score to an
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
88

Figure 3: Generative Adversarial Network.
image, if it is the original image, and a low score if
it is generated. The goal of generator is to maximize
D(G(y)) (or minimize 1−D(G(y))). The generator is
trained to optimize the following function:
min
G
V
G
(D, G) = min
G
(E
y∼p
y
[log(1 − D(G(y)))]), (1)
where V is the loss function. The discriminator max-
imizes the score for original images (D(x)) while mi-
nimizing the score for generated images, i.e. mini-
mizing (D(G(y)) or maximizing (1 − D(G(y)). The
discriminator optimizes the following function
max
D
V
D
(D, G) = max
D
(E
x
[log(D(x))]+
E
y∼p
y
[log(1 − D(G(y)))])
(2)
The combined loss function for the generator and the
discriminator is,
min
G
max
D
V (D, G) = min
G
max
D
(E
x
[log(D(x))]+
E
y∼p
y
[log(1 − D(G(y)))])
(3)
The two networks are trained to achieve Nash equi-
librium (Osborne and Rubinstein, 1994), i.e. the ge-
nerator creates images that are realistic to the training
data and the discriminator fails to distinguish the ge-
nerated images from training images. We train the
GAN on normal images from the camera. Figure 4
shows images generated by GAN ((a), (c)) and com-
pares against the original images ((b), (d)). The two
sets of images are representative of day and night. We
apply log scaling on the night image.
3.2 Siamese Network as a Feature
Extractor
The generator synthesizes reference images (x
∗
). The
images from the camera (x) are compared against the
synthesized images (x
∗
) using a distance measure that
is used to detect a tamper. A linear boundary is too
restricted for this task because of the complex nature
(a) left, (b) mid-left, (c) mid-right, (d) right
Figure 4: Comparison of generated images vs original ima-
ges. a) generated image (daytime), b) original image (day-
time), c) generated image (nighttime), and d) original image
(nighttime). The night time images are log scaled.
of images from the surveillance camera. We trans-
form x and x
∗
into another feature space, such that the
distance between the transformed features of x and x
∗
is maximum, if x is tampered; and minimum, if x is
normal. A linear boundary can be established in the
transformed feature space to distinguish between dif-
ferent classes. This is modeled using a Siamese net-
work. The network consists of two parallel convoluti-
onal network (Figure 2). The two networks share the
same set of weights ( f (x, w)), where w are the weig-
hts. The shared weights allow us to apply the same
transformations on the reference (x
∗
) and input ima-
ges (x).
z = f (x, w) and z
∗
= f (x
∗
, w) (4)
We compare the transformed features using a distance
measure (d(z, z∗)). The distance vector is used as
input to a fully connected layer. This estimates the
posterior values of the image belonging to each class
(p(C|d(z, z∗))). We follow a maximum posterior ap-
proach to choose class o.
o = arg
i
max p(c
i
|d(z, z
∗
)) (5)
Camera Tampering Detection using Generative Reference Model and Deep Learned Features
89
The network is trained to minimize the categorical
cross entropy loss.
min
S
V
S
= min
S
N
∑
i=1
k
∑
c=1
1
o∈c
i
log(p(o ∈ c
i
)) (6)
Where 1
o∈c
i
is the indicator function.
4 IMPLEMENTATION
We discuss the system architecture, training proce-
dure, and the dataset in this section.
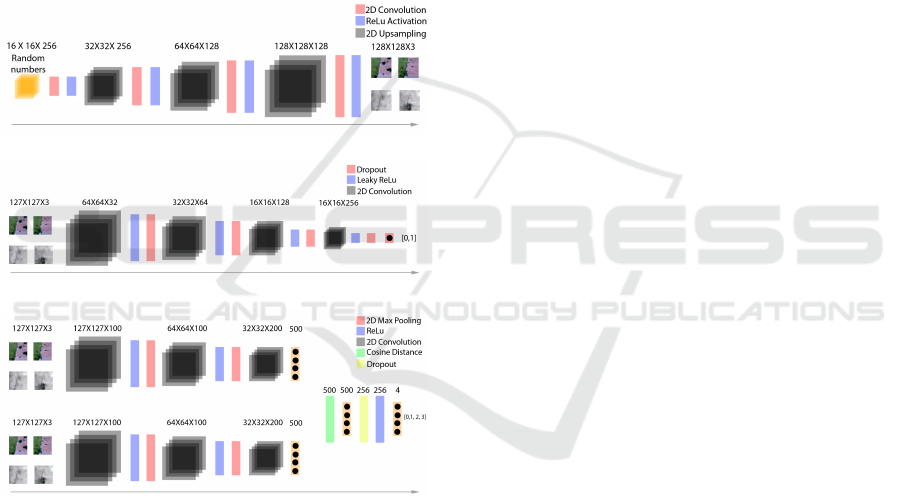
4.1 System Architecture
(a)
(b)
(c)
Figure 5: System architecture. a) Generator, b) Discrimina-
tor, and c) Siamese.
Figure 5(a) shows the system architecture of the
generator. The input is a matrix of random num-
bers with size 16X16X256, the numbers are passed
through three 2D upsampling layers. Each upsam-
pling layer is followed by a 2D convolution layer.
We perform batch normalization and apply activa-
tion using rectified linear units (ReLu). The output
is a matrix of size 127X127X3. We choose this size
to match the size of the images in the dataset. Fi-
gure 5(b) shows the system architecture of the discri-
minator used in the adversarial training of the genera-
tor. It consists of four 2D convolution layers. We per-
form batch normalization and use leaky ReLu for acti-
vation after each convolution layer. We allow a 25%
dropout after each activation to avoid over-fitting. Fi-
gure 5(c) shows the architecture of the Siamese net-
work. The base CNN consists of two convolution lay-
ers; each followed by ReLu activation and 2D max
pooling layers. A pair of these CNNs are initiali-
zed; one takes the input from the generator, and the
other takes the input from the camera. We compute
the cosine distance between the output vector from
the two CNNs. The distance vector is given as input
to a fully connected layer followed by a dropout and
ReLu activation layer. Finally passed through another
fully connected layer, the output of which, is mapped
to posterior values of the four classes using softmax
activation. The four classes represent normal, cove-
red, defocussed, and moved status of the camera.
4.2 Training Approach
The generative adversarial network and the Siamese
network are trained separately. The dataset requi-
red for training the two networks is different. The
GAN requires a large number of images, represen-
ting the normal operating conditions of the camera.
The Siamese network, requires a combination of nor-
mal, covered, defocussed, and moved images. Large
scale datasets representing camera tampering in sur-
veillance camera are not available.
Training the GAN: The GAN is trained using ima-
ges from a normally functioning surveillance camera.
The GAN fails to learn representation of images that
are contrasting. For example, we failed to train a
GAN to sample images that represent both day and
night (Fig 6 (a, b) respectively). The training data is
segmented into multiple clusters based on their color
features using K-means. (Fig 6 (c, d)) shows the re-
presentation of the centers of the clusters for K = 2.
While testing, the suitable GAN is selected based on
the image’s distance to the cluster.
Fig 6 (e, f) shows sample images generated by the
two GANs. Furthermore, the GAN fail to learn the
distribution for night images because of their low dy-
namic range. We apply log scaling, on the images in
the training and testing phases. Figure 6 (b) show the
night image after log scaling.
Training the Siamese Network: We synthesize the
data required for training the Siamese network, using
image processing techniques. Four classes of data are
required for training the Siamese network. We apply
spatial translation, spatial smoothing, and pixel copy
operations to synthesize moved, defocussed, and co-
vered tampers; respectively. Figure 7 shows the steps
in synthesizing tampering in surveillance images. The
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
90

(a) (b)
(c) (d)
(e) (f)
Figure 6: Surveillance camera view a) Day, b) Night; Kme-
ans center: c) K = 0, d) K = 1; Generated Images e) K = 0,
and f) K = 1.
Figure 7: Synthetic Data: Method to synthesize original,
covered, defocussed, and moved images.
center region is cropped and used as a region of inte-
rest (roi) for normal images; cropping the images al-
lows us to simulate moved tampers. The roi is transla-
ted and and then cropped to simulate a moved tamper.
The image is cropped first, and then a block of pixels
are replaced by a random texture, to simulate covered
tampers. We choose random textures from Kylberg
Texture Dataset (Kylberg, 2011) to accomplish this.
The image is cropped first, and then smoothed using
a Gaussian kernel to simulate a defocussed tamper.
We use various range of parameters for translation,
smoothing, and copying to induce various extents of
tampering. Figure 8 shows examples of original, co-
vered, defocussed, and moved images.
We use normal images captured to train the GAN,
and synthetic data containing a uniform distribution
of four classes to train the Siamese network. The data
are captured from a surveillance camera operating at
3 fps. Twenty four hours of data are used to train the
GANs and the Siamese network. We split the data
into two cluster for day and night to train individual
GANs and the Siamese network. The GANs and Si-
amese network are trained over 5 and 10 epochs, re-
spectively.
(a) left, (b) mid-left, (c) mid-right, (d) right
Figure 8: Synthetic Data. a) Original, b) Covered, c) Defo-
cussed, and d) Moved images.
4.3 Evaluations
We evaluate performance of the system over a tes-
ting dataset that is representative of video from a sur-
veillance camera. Testing dataset consists of video
from surveillance camera, captured over a period of
24 hours at 3 fps. The images are originally captured
at 1080p and down sampled to 127X127. The data-
set consists of over 250K images of which a quarter
(65K) are tampered; the tampers are distributed uni-
formly (approximately 21K each).
The testing data are synthetic in nature. A random
tamper is induced every ten minutes over a period of
24 hours; this ensures that the testing data are well
distributed over different illumination changes occur-
ring through the day. Each tamper last between five
to ten minutes. Two parameters are varied to indu-
ces tampers: extent, and rate. The extent parameter
allows us to test the ability of the system to detect va-
rying amounts of tampering. In covered tampering,
extent defines the ratio of the image area that is co-
vered. In defocussed images, it defines the blurriness
of the image. In moved images, it defines the ratio of
overlap between the original and moved image. The
rate parameter, allows us to test the ability of the sy-
stem to detect tampering that occurs at different rate.
Rate defines the time it takes for tampering to occur.
For example, a covered tampering that covers the en-
tire image can occur instantaneously or over a period
of five minutes.
We compare the performance of the propo-
sed system against two existing approaches, which
are (Mantini and Shah, 2017) and (Lee et al., 2014).
(Mantini and Shah, 2017), and (Lee et al., 2014) are
unified tampering detection systems. They have the
capability to detect tampering, but lack the capacity
Camera Tampering Detection using Generative Reference Model and Deep Learned Features
91
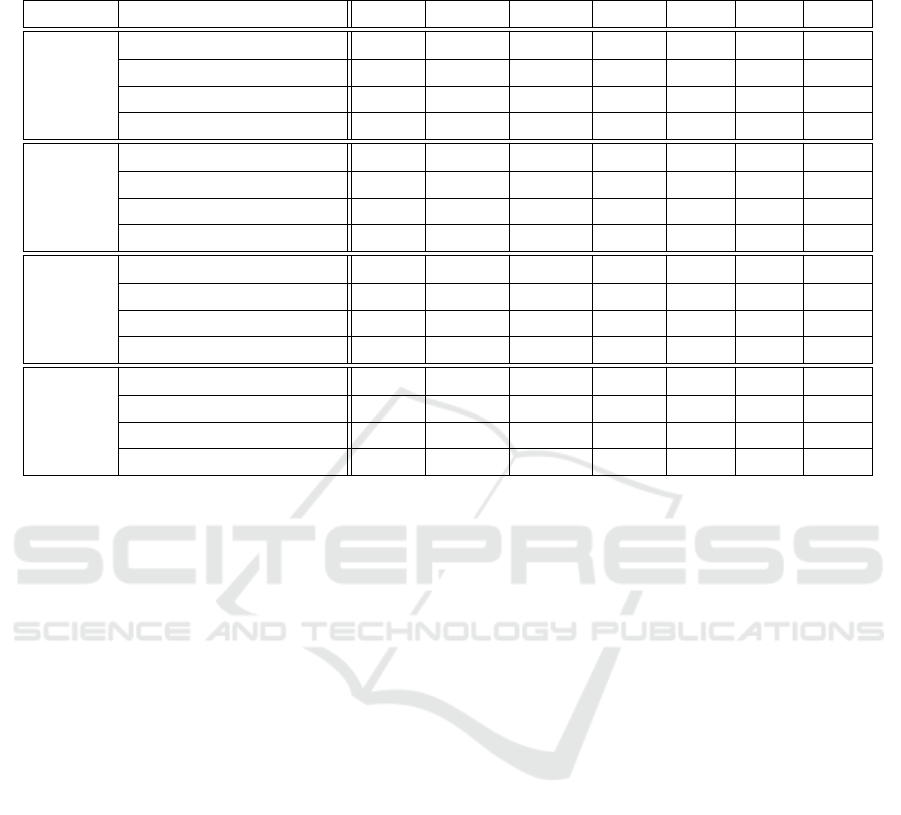
Table 1: Performance comparison against (Lee et al., 2014) and (Mantini and Shah, 2017), where, TP - true positives, FP -
false positives, TN - true negatives, FN - false negatives, TPR - true positive rate, FPR, false positive rate, and Acc - accuracy.
Method TP FP TN FN TPR FPR Acc
Covered (Lee et al., 2014) 20213 189383 4405 1567 0.928 0.977 0.114
(Mantini and Shah, 2017) 14704 7720 186068 7076 0.675 0.039 0.931
(Proposed) 21599 22286 171474 181 0.991 0.115 0.895
(Proposed
2
) 27889 5233 166712 1980 0.933 0.030 0.964
Defocus (Lee et al., 2014) 21502 189383 4405 278 0.987 0.977 0.120
(Mantini and Shah, 2017) 18929 7720 186068 2851 0.869 0.039 0.950
(Proposed) 21508 22286 171474 272 0.987 0.115 0.895
(Proposed
2
) 26892 5233 166712 2449 0.916 0.030 0.961
Moved (Lee et al., 2014) 20306 189383 4405 1474 0.932 0.977 0.114
(Mantini and Shah, 2017) 2966 7720 186068 18814 0.136 0.039 0.876
(Proposed) 21757 22286 171474 23 0.998 0.115 0.896
(Proposed
2
) 25567 5233 166712 2373 0.915 0.030 0.961
Overall (Lee et al., 2014) 62021 189383 4405 3319 0.949 0.977 0.256
(Mantini and Shah, 2017) 36599 7720 186068 28741 0.560 0.039 0.859
(Proposed) 64864 22286 171474 476 0.992 0.115 0.912
(Proposed
2
) 80348 5233 166712 6802 0.921 0.030 0.953
to classify the tampering as covered, defocussed, and
moved. We perform comparison under a two class
assumption of normal, and tampered.
Most methods so far have relied on image’s appea-
rance features to detect tampering, and temporal ana-
lysis to suppress false positives. (Mantini and Shah,
2017) used gradient magnitude as feature to detect
tampering, and a Kalman filter to suppress false po-
sitives. (Lee et al., 2014) uses edges as features to de-
tect tampering, and a moving average mechanism to
suppress spurious false alarms. The proposed system
uses image’s features to detect tampering, and does
not conduct any temporal analysis. While the core
objective of this paper is in understanding the appea-
rance features of an image that can be leveraged for
detecting tampering, in order to compare it with ex-
isting methods, we supplement the proposed system
with a simple temporal analysis mechanism to sup-
press spurious false alarms, and demonstrate the re-
sults for the two class scenario (c ∈ [0, 1]). Proposed
2
,
detects a tamper at time t, by taking the mode of the
class predictions from the previous t − n instances.
c
t
= mode(c
t−1
, c
t−2
, ..., c
t−n
) (7)
Proposed
2
uses n = 3.
We quantify the performance of detecting the
three classes of tampering by dividing the dataset into
three sets, each containing of normal images and only
one variety of tamper (covered, defocussed, and mo-
ved). Table 1 shows the performance of the propo-
sed system against (Lee et al., 2014) and (Mantini and
Shah, 2017).
Results show Proposed
2
to perform best with an
ovarall accuracy of 95%, followed by the proposed
method with 91%, (Mantini and Shah, 2017) with
85%, and (Lee et al., 2014) with 25%. It should be
noted that the (Lee et al., 2014) is unable to cope
with the complexity of the scene and eventually la-
bels all images as tampered. This is evident from the
97% false positive rate. Mantini and Shah’s (Man-
tini and Shah, 2017) method is capable of detecting
defocussed images better than other tampers. Their
method models signal activity, an accumulated mea-
sure of gradient magnitude, to detect tampering. The
edges degrade under a defocussed tamper but not ne-
cessarily during a covered or moved tamper. Their
system performs poorly while detecting moved tam-
pers. (Mantini and Shah, 2017) shows a higher accu-
racy for covered and defocussed images, and produ-
ced less false positives as well, compared to the pro-
posed system. This can be attributed to the systems
ability to suppress false alarms, rather than its ability
to detect tampering. This can be demonstrated from
the fact that Proposed
2
method outperforms (Mantini
and Shah, 2017) with respect to accuracy and false
positive rate because it is supplemented to perform
temporal analysis. The proposed method is highly ca-
pable of detecting tampering, it detected 99%, 98%
and 99% of covered, defocussed, and moved tampers
respectively, while Proposed
2
detected 93%, 91% and
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
92
Table 2: Confusion matrix.
Normal Covered Defocus Moved
Normal 171474 6872 8119 7295
Covered 181 21383 185 31
Defocus 272 85 21011 412
Moved 23 1529 26 20202
91%, and (Mantini and Shah, 2017) detected 67%,
86% and 13%. Temporal analysis lowers the false
positives, but effects the systems capability to detect
tampering.
The proposed system classifies the image as one
of the four classes: normal, covered, defocussed, and
moved. Table 2 shows the confusion matrix, and there
is a noticeable confusion amongst the three tampering
classes and normal images. These correspond to the
false alarms. The false negatives are minimal. Five
percent of moved images have been classified as co-
vered, and two percent of defocussed images are clas-
sified as moved. Overall, the system is highly capable
of detecting and classifying tampers.
4.4 Disadvantages
The proposed system requires a large dataset for trai-
ning, compared to (Mantini and Shah, 2017; Lee
et al., 2014). Most methods use selectivity to update
the moving average and the reference model. The pro-
posed method does not formally introduce an online
mechanism to update the trained model. So, the per-
formance of the system under extreme weather condi-
tions is unpredictable. Furthermore, this renders the
system scene dependent. While the existing methods
are also scene dependent, their training phases are
quick involving only a few hundred frames. This is
not viable with the proposed system. We wish to ex-
plore the performance of the system using scene inde-
pendent features in future, and validate if the learning
can transfer to various scenes.
5 CONCLUSION
This paper presents a novel deep learning approach
for detecting tampering in surveillance cameras. In
the process we have trained a generative adversarial
network that is capable of sampling images, which
represent the normal operating conditions of the ca-
mera. We trained a Siamese network that transforms
image into a new feature space so as to maximize
the distance between normal and tampered images,
while minimizing the distance amongst normal ima-
ges. This paper shows a method to induce artificial
tampering in images to synthesize tampering in sur-
veillance videos. We have compared the performance
of the proposed system against (Mantini and Shah,
2017), and (Lee et al., 2014). Results show that
the model is highly capable of detecting and classi-
fying tampering, and outperforms two existing met-
hods with respect to accuracy and false positive rate.
ACKNOWLEDGEMENTS
This work was performed in part through the
the financial assistance award, Multi-tiered Vi-
deo Analytics for Abnormality Detection and Aler-
ting to Improve Response Time for First Respon-
der Communications and Operations (Grant No.
60NANB17D178), from U.S. Department of Com-
merce, National Institute of Standards and Techno-
logy.
REFERENCES
Aksay, A., Temizel, A., and Cetin, A. E. (2007). Camera
tamper detection using wavelet analysis for video sur-
veillance. In 2007 IEEE Conference on Advanced Vi-
deo and Signal Based Surveillance, pages 558–562.
Bedagkar-Gala, A. and Shah, S. K. (2014). A survey of ap-
proaches and trends in person re-identification. Image
and Vision Computing, 32(4):270 – 286.
Bromley, J., Guyon, I., LeCun, Y., S
¨
ackinger, E., and Shah,
R. (1994). Signature verification using a” siamese”
time delay neural network. In Advances in neural in-
formation processing systems, pages 737–744.
Collins, R. T., Lipton, A. J., Kanade, T., Fujiyoshi, H., Dug-
gins, D., Tsin, Y., Tolliver, D., Enomoto, N., Hase-
gawa, O., Burt, P., et al. (2000). A system for vi-
deo surveillance and monitoring. Technical report,
Technical Report CMU-RI-TR-00-12, Robotics Insti-
tute, Carnegie Mellon University.
Czyzewski, A. and Dalka, P. (2008). Moving object de-
tection and tracking for the purpose of multimodal
surveillance system in urban areas. In New Directi-
ons in Intelligent Interactive Multimedia, pages 75–
84. Springer.
Dong, L., Zhang, Y., Wen, C., and Wu, H. (2016). Ca-
mera anomaly detection based on morphological ana-
lysis and deep learning. In 2016 IEEE International
Conference on Digital Signal Processing (DSP), pa-
ges 266–270.
Ellwart, D., Szczuko, P., and Czy
˙
zewski, A. (2012). Ca-
mera Sabotage Detection for Surveillance Systems,
pages 45–53. Springer Berlin Heidelberg, Berlin, Hei-
delberg.
Gaibotti, A., Marchisio, C., Sentinelli, A., and Boracchi,
G. (2015). Tampering Detection in Low-Power Smart
Camera Tampering Detection using Generative Reference Model and Deep Learned Features
93

Cameras, pages 243–252. Springer International Pu-
blishing, Cham.
Gauthier, J. (2014). Conditional generative adversarial nets
for convolutional face generation. Class Project for
Stanford CS231N: Convolutional Neural Networks for
Visual Recognition, Winter semester, 2014(5):2.
Gil-Jim
´
enez, P., L
´
opez-Sastre, R., Siegmann, P., Acevedo-
Rodr
´
ıguez, J., and Maldonado-Basc
´
on, S. (2007). Au-
tomatic Control of Video Surveillance Camera Sabo-
tage, pages 222–231. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In Advan-
ces in neural information processing systems, pages
2672–2680.
Guler, P., Emeksiz, D., Temizel, A., Teke, M., and Temizel,
T. T. (2016). Real-time multi-camera video analytics
system on gpu. Journal of Real-Time Image Proces-
sing, 11(3):457–472.
Harasse, S., Bonnaud, L., Caplier, A., and Desvignes, M.
(2004). Automated camera dysfunctions detection.
In 6th IEEE Southwest Symposium on Image Analy-
sis and Interpretation, 2004., pages 36–40.
Huang, D.-Y., Chen, C.-H., Chen, T.-Y., Hu, W.-C., and
Chen, B.-C. (2014). Rapid detection of camera tampe-
ring and abnormal disturbance for video surveillance
system. Journal of Visual Communication and Image
Representation, 25(8):1865 – 1877.
Ivanov, A. and Yudin, D. (2019). Visibility loss detection
for video camera using deep convolutional neural net-
works: Volume 1. pages 434–443.
Javadi, M. S., Kadim, Z., Woon, H. H., Khairunnisa, M. J.,
and Samudin, N. (2015). Video stabilization and tam-
pering detection for surveillance systems using homo-
graphy. In 2015 International Conference on Compu-
ter, Communications, and Control Technology (I4CT),
pages 275–279.
Kim, K., Chalidabhongse, T. H., Harwood, D., and Da-
vis, L. (2005). Real-time foreground–background seg-
mentation using codebook model. Real-time imaging,
11(3):172–185.
Kryjak, T., Komorkiewicz, M., and Gorgon, M. (2012).
Fpga implementation of camera tamper detection in
real-time. In Proceedings of the 2012 Conference on
Design and Architectures for Signal and Image Pro-
cessing, pages 1–8.
Kylberg, G. (2011). Kylberg Texture Dataset v. 1.0. Centre
for Image Analysis, Swedish University of Agricultu-
ral Sciences and Uppsala University.
Ledig, C., Theis, L., Husz
´
ar, F., Caballero, J., Cunning-
ham, A., Acosta, A., Aitken, A. P., Tejani, A., Totz,
J., Wang, Z., et al. (2017). Photo-realistic single
image super-resolution using a generative adversarial
network. In CVPR, volume 2, page 4.
Lee, G.-b., Lee, M.-j., and Lim, J. (2015). Unified camera
tamper detection based on edge and object informa-
tion. Sensors, 15(5):10315–10331.
Lee, G.-b., Shin, Y.-c., Park, J.-h., and Lee, M.-j. (2014).
Low-complexity camera tamper detection based on
edge information.
Lin, D. T. and Wu, C. H. (2012). Real-time active tampering
detection of surveillance camera and implementation
on digital signal processor. In 2012 Eighth Internatio-
nal Conference on Intelligent Information Hiding and
Multimedia Signal Processing, pages 383–386.
Mantini, P. and Shah, S. K. (2014). Human trajectory fore-
casting in indoor environments using geometric con-
text. In Proceedings of the 2014 Indian Conference
on Computer Vision Graphics and Image Processing,
page 64. ACM.
Mantini, P. and Shah, S. K. (2015). Person re-identification
using geometry constrained human trajectory mo-
deling. In Technologies for Homeland Security (HST),
2015 IEEE International Symposium on, pages 1–6.
IEEE.
Mantini, P. and Shah, S. K. (2016a). Camera placement
optimization conditioned on human behavior and 3d
geometry. In VISIGRAPP (3: VISAPP), pages 227–
237.
Mantini, P. and Shah, S. K. (2016b). Multiple people
tracking using contextual trajectory forecasting. In
Technologies for Homeland Security (HST), 2016
IEEE Symposium on, pages 1–6. IEEE.
Mantini, P. and Shah, S. K. (2017). A signal detection
theory approach for camera tamper detection. In Ad-
vanced Video and Signal Based Surveillance (AVSS),
2017 14th IEEE International Conference on, pages
1–6. IEEE.
Nie, D., Trullo, R., Lian, J., Petitjean, C., Ruan, S.,
Wang, Q., and Shen, D. (2017). Medical image synt-
hesis with context-aware generative adversarial net-
works. In International Conference on Medical Image
Computing and Computer-Assisted Intervention, pa-
ges 417–425. Springer.
Osborne, M. J. and Rubinstein, A. (1994). A course in game
theory. MIT press.
Radford, A., Metz, L., and Chintala, S. (2015). Unsuper-
vised representation learning with deep convolutio-
nal generative adversarial networks. arXiv preprint
arXiv:1511.06434.
Raghavan, A., Price, R., and Liu, J. (2012). Detection
of scene obstructions and persistent view changes in
transportation camera systems. In 2012 15th Interna-
tional IEEE Conference on Intelligent Transportation
Systems, pages 957–962.
Ribnick, E., Atev, S., Masoud, O., Papanikolopoulos, N.,
and Voyles, R. (2006). Real-time detection of camera
tampering. In 2006 IEEE International Conference on
Video and Signal Based Surveillance, pages 10–10.
Saglam, A. and Temizel, A. (2009). Real-time adaptive ca-
mera tamper detection for video surveillance. In 2009
Sixth IEEE International Conference on Advanced Vi-
deo and Signal Based Surveillance, pages 430–435.
Shih, C. C., Chen, S. C., Hung, C. F., Chen, K. W., Lin,
S. Y., Lin, C. W., and Hung, Y. P. (2013). Real-time
camera tampering detection using two-stage scene
matching. In 2013 IEEE International Conference on
Multimedia and Expo (ICME), pages 1–6.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
94

Sidnev, A., Barinova, M., and Nosov, S. (2018). Efficient
camera tampering detection with automatic parameter
calibration. In Advanced Video and Signal Based Sur-
veillance (AVSS), 2018 15th IEEE International Con-
ference on, pages 061–066. IEEE.
Tsesmelis, T., Christensen, L., Fihl, P., and Moeslund, T. B.
(2013). Tamper detection for active surveillance sys-
tems. In 2013 10th IEEE International Conference on
Advanced Video and Signal Based Surveillance, pages
57–62.
Tung, C.-L., Tung, P.-L., and Kuo, C.-W. (2012). Ca-
mera tamper detection using codebook model for vi-
deo surveillance. In 2012 International Conference on
Machine Learning and Cybernetics, volume 5, pages
1760–1763.
Wang, Y.-K., Fan, C.-T., and Chen, J.-F. (2014). Traffic ca-
mera anomaly detection. In Proceedings of the 2014
22Nd International Conference on Pattern Recogni-
tion, ICPR ’14, pages 4642–4647, Washington, DC,
USA. IEEE Computer Society.
Wang, Y. K., Fan, C. T., Cheng, K. Y., and Deng, P. S.
(2011). Real-time camera anomaly detection for real-
world video surveillance. In 2011 International Con-
ference on Machine Learning and Cybernetics, vo-
lume 4, pages 1520–1525.
Willsky, A. S. (1985). Detection of abrupt changes in dyn-
amic systems. In Detection of abrupt changes in sig-
nals and dynamical systems, pages 27–49. Springer.
Yin, H., Jiao, X., Luo, X., and Yi, C. (2013). Sift-based
camera tamper detection for video surveillance. In
2013 25th Chinese Control and Decision Conference
(CCDC), pages 665–668.
Zhang, H., Xu, T., Li, H., Zhang, S., Huang, X., Wang,
X., and Metaxas, D. (2017). Stackgan: Text to photo-
realistic image synthesis with stacked generative ad-
versarial networks. arXiv preprint.
Camera Tampering Detection using Generative Reference Model and Deep Learned Features
95
