
Quantitative Affine Feature Detector Comparison based on Real-World
Images Taken by a Quadcopter
Zolt
´
an Pusztai
1,2
and Levente Hajder
2
1
Geometric Computer Vision Group, Machine Perception Laboratory, MTA SZTAKI, Kende st. 17, Budapest 1111, Hungary
2
Department of Algorithm and Applications, E
¨
otv
¨
os Lor
´
and University, P
´
azm
´
any P
´
eter stny. 1/C, Budapest 1117, Hungary
Keywords:
Feature detector, Quantitative Comparison, Affine Transformation, Detection Error, Ground Truth Generation.
Abstract:
Feature detectors are frequently used in computer vision. Recently, detectors which can extract the affine
transformation between the features have become popular. With affine transformations, it is possible to esti-
mate the properties of the camera motion and the 3D scene from significantly fewer feature correspondences.
This paper quantitatively compares the affine feature detectors on real-world images captured by a quadcopter.
The ground truth (GT) data are calculated from the constrained motion of the cameras. Accurate and very
realistic testing data are generated for both the feature locations and the corresponding affine transformations.
Based on the generated GT data, many popular affine feature detectors are quantitatively compared.
1 INTRODUCTION
Feature detectors have been studied since the born of
computer vision. First, point-related local detectors
are developed to explore properties of camera mo-
tion and epipolar geometry. Local features describe
only a small area of the image, thus they can be ef-
fectively used to find point correspondences, even in
the presence of high illumination, viewpoint change
or occlusion. Affine feature detectors can detect the
local affine warp of the detected point regions. The
affine transformation can be used to solve the basic
task of epipolar geometry (e.g. to detect camera mo-
tion, object detection or 3D reconstruction) using less
correspondences than general point features. This pa-
per deals with the quantitative comparison of affine
feature detectors using video sequences, taken by a
quadcopter, captured in a real-world environment.
Interest feature detectors have been studied in a
long period of computer vision. The well-known Har-
ris (Harris and Stephens, 1988) corner detector or Shi-
Tomasi detector (Shi and Tomasi, 1994) have been
published more than two decades ago. Since then,
new point feature detectors have been implemented,
e.g. SIFT (Lowe, 2004), SURF (Bay et al., 2008),
KAZE (Alcantarilla et al., 2012), BRISK (Leuteneg-
ger et al., 2011) and so on. Correspondences are made
using a feature location and a feature descriptor. The
latter describes the local small area of the feature with
a vector in a compact and distinguish way. These des-
criptor vectors can be used for feature matching over
the successive image. Features, whose descriptor vec-
tors are close to each other, potentially yield a match.
While point-based features estimate only point
correspondences, affine feature detectors can extract
the affine transformations around the feature centers
as well. An affine transformation contains the linear
approximation of the warp around the point corre-
spondences. In other words, this is a 2 by 2 linear
transformation matrix which transforms the local re-
gion of the feature to that of the corresponding fea-
ture. Each affine transformation contains enough in-
formation for estimating the normal vector of the tan-
gent plane at the corresponding 3D location of the fe-
ature. These additional constraints can be used to esti-
mate fundamental matrix, camera movement or other
epipolar properties using less number of features, than
using point correspondences.
The aim of this paper is to quantitatively compare
the feature detectors and the estimated affine transfor-
mations, using real-world video sequences captured
by a quadcopter. The literature of previous work is not
rich. Maybe the most significant work was published
by Mikolajczyk et al. (Mikolajczyk et al., 2005). They
compare several affine feature detectors using real-
world images. However, in their comparison, either
the camera has fixed location or the scenes are planar,
thus, the images are related by homographies. The er-
704
Pusztai, Z. and Hajder, L.
Quantitative Affine Feature Detector Comparison based on Real-World Images Taken by a Quadcopter.
DOI: 10.5220/0007372907040715
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 704-715
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ror for the affine transformations is computed by the
overlapping error of the related affine ellipses or by
the repeatability score. Even trough the authors com-
pared the detectors using several different noise types
(blur, JPEG compression, light change) we think that
the constraints of non-moving camera or planar scene
yield very limited test cases. A comprehensive study
can be found in (Tuytelaars and Mikolajczyk, 2008),
however the paper does not contain any real-world
test. Recently Pusztai et al. proposed a technique to
quantitatively compare feature detectors and descrip-
tors using a structured-light 3D scanner (Pusztai and
Hajder, 2017). However, the testing data consist of
small objects and rotation movement only. Tareen et
al. (Tareen and Saleem, 2018) also published a com-
parison of the most popular feature detector and des-
criptor algorithms. Their ground-truth (GT) data ge-
neration is twofold: (i) They use the Oxfordian data-
set, that was also applied in the work of (Mikolajczyk
et al., 2005), (ii) they generated test images, including
GT transformations, carried out by different kinds of
affine transformations for the original images: trans-
lation, rotation and scale, and the transformed images
are synthesized by common bilinear interpolation. In
the latter case, the processed images are not taken by
a camera, thus the input data for the comparison is not
really realistic.
The literature of affine feature comparisons is not
extensive, despite the fact that it is an important sub-
ject. Most detectors are compared to others, using
only a small set of images, and parameters tuned to
achieve the best results. In real world applications,
the best parameter set may differ from the laboratory
experience. Thus, more comparisons have to be made
using real-world video sequences and various camera
movements.
In this paper, we show, that the affine invariant
feature detectors can be evaluated quantitatively on
real-world test sequences if images are captured by a
quadcopter-mounted camera. The main contributions
of the paper are twofold: (i) First, the GT affine trans-
formation generation is shown in case of several spe-
cial movements of a quadcopter where affine trans-
formations and corresponding point locations can be
very accurately determined. To the best of our know-
ledge, this is the first study in which the ground truth
data is generated using real images of a moving cop-
ter. (ii) Then several affine covariant feature detectors
are quantitatively compared using the generated GT
data. Both point locations and the related affine trans-
formations are examined in the comparison.
The structure of this paper is as follows. First, the
rival methods are theoretically described in Section 2.
Then the ground truth data generation methods are
overviewed for different drone movements and ca-
mera orientations. Section 4 contains the methodo-
logy of the evaluation. The test results are discussed
in Section 5, and Section 6 concludes the research.
2 OVERVIEW OF
AFFINE-COVARIANT
DETECTORS
In this section, the affine transformations and the af-
fine covariant detectors are briefly introduced. The
detectors aim to separately find discriminate features
in the images. If a feature is found, then the affine
shape can be determined which is usually visualized
as an ellipse. Figure 1 shows the local affine regions
of a corresponding feature pair in successive images.
The methods to detect discriminate features and their
affine shapes vary from detector to detector. They are
briefly introduced as follows:
Harris-Laplace, Harris-Affine. The methods intro-
duced by (Mikolajczyk and Schmid, 2002) are based
on the well-known Harris detector (Harris and Ste-
phens, 1988). Harris uses the so-called second mo-
ment matrix to extract features in the images. The
matrix is as follows:
M(x) = σ
2
D
G(σ
I
)∗ (1)
f
2
x
(x,σ
D
) f
x
(x,σ
D
) f
y
(x,σ
D
)
f
x
(x,σ
D
) f
y
(x,σ
D
) f
2
y
(x,σ
D
)
,
where
G(σ) =
1
2πσ
2
exp
−
|
x
|
2
2σ
2
!
,
f
x
(x,σ
D
) =
∂
∂x
G(σ
D
) ∗ f (x).
The matrix (M) contains the gradient distribution
around the feature, σ
D
, σ
I
are called the differenti-
ation scale and integration scale, respectively. A local
feature point is found, if the term det(M)−λtrace(M)
is higher than a pre-selected threshold. This means
that both of the eigenvalues of M are large, which in-
dicates a corner in the image.
After the location of the feature is found, a cha-
racteristic scale selections needs to be carried out.
The circular Laplace operator is used for this purpose.
The characteristic scale is found if the similarity of
the operator and the underlying image structure is the
highest. The final step of this affine invariant detector
is to determine the second scale of the feature points
using the following iterative estimation:
1. Detect the initial point and corresponding scale.
Quantitative Affine Feature Detector Comparison based on Real-World Images Taken by a Quadcopter
705

Figure 1: The affine transformation (A) of corresponding features. The ellipses show the affine shapes around the features. A
approximately transforms the local region of the first image to that of the second one.
2. Estimate the affine shape using M.
3. Normalize the affine shape into a circle using
M
1/2
.
4. Detect new position and scale in the normalized
region.
5. Goto (2), if the the eigenvalues of M are not equal.
The iteration always converges, the obtained affine
shape is described as an ellipse.
The scale and shape selections described above
can be applied to any point feature. Mikolajczyk also
proposed the Hessian-Laplace and Hessian-Affine
detectors, which use the Hesse matrix for extracting
features, instead of the Harris. The matrix is as fol-
lows:
H(x) =
f
xx
(x,σ
D
) f
xy
(x,σ
D
)
f
xy
(x,σ
D
) f
yy
(x,σ
D
)
, (2)
where f
xx
(x,σ
D
) is the second order Gaussian smoot-
hed image derivatives. The Hesse matrix can be used
to detect blob-like features.
Edge-based Regions (EBR). (Tuytelaars and
Van Gool, 2004) introduced a method to detect affine
covariant regions around the corners. The Harris
corner detector is used along with standard Canny
edge detector. Affine regions are found where two
edges meet at a corner. The corner point (p) and two
points moving along the two edges (p
1
and p
2
) define
a parallelogram. The final shape is found, where the
region yields extremum in the following function:
f (Ω) = abs
|(p − p
g
)(q − p
g
)|
|(p − p
1
)(p − p
2
)|
×
M
1
00
q
M
2
00
M
0
00
− (M
1
00
)
2
,
(3)
where
M
n
pq
=
Z
Ω
I
n
(x,y)x
p
y
q
dx dy,
p
g
=
M
1
00
M
1
00
,
M
1
01
M
1
00
,
and p
g
is the center of gravity. The parallelogram re-
gions are then converted to ellipses.
Intensity-extrema-based Regions (IBR). While
EBR find features at the corners and edges, IBR ex-
tracts affine regions based on intensity properties.
First, the image is smoothed, then the local extrema
is selected using non-maximum suppression. These
points cannot be detected precisely, however they are
robust to monotonic intensity transformations. Rays
are cast from the local extremum to every direction,
and the following function is evaluated on each ray:
f
I
(t) =
abs(I(t) − I
0
)
max
R
t
0
abs(I(t)−I
0
)dt
t
,d
(4)
where, t, I(t), I
0
and d are the arclength along the
ray, the intensity at position, the intensity extremum
and a small number to prevent dividing by 0, respecti-
vely. The function yields extremum where the inten-
sity suddenly changes. The points along the cast rays
define an usually irregularly-shaped region, which is
replaced by an ellipse having the same moments up to
the second order.
TBMR. Tree-Based Morse Regions is introduced
in (Xu et al., 2014). This detector is motivated by
Morse theory, selecting critical regions as features,
using the Min and Max-tree. TBMR can be seen as
a variant of MSER, however, TBMR is invariant to
illumination change and needs less number of para-
meters.
SURF. SURF is introduced in (Bay et al., 2008). It
is the fast approximation of SIFT (Lowe, 2004). The
Hessian matrix is roughly approximated using box fil-
ters, instead of Gaussian filters. This makes the detec-
tor relatively fast comparing to the others. Despite the
approximations, SURF can find reliable features.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
706

3 GT DATA GENERATION
1
In order to quantitatively compare the detectors per-
formance and the reliability of affine transformations,
ground truth (GT) data is needed. Many comparison
databases (Mikolajczyk et al., 2005; Cordes et al.,
2013; Zitnick and Ramnath, 2011) are based on ho-
mography, which is extracted from the observed pla-
nar object. Images are taken from different camera
positions, and the GT affine transformations are cal-
culated from the homography. Instead of this, our
comparison is based on images captured by a quad-
copter in a real world environment and the GT affine
transformation is extracted directly from constrained
movement of the quadcopter. This work is motivated
by the fact, that the affine parameters can be calcula-
ted more precisely from the constrained movements,
than from the homography. Moreover, if the parame-
ters of the motion are estimated, the GT location of
the features can be determined as well. Thus, it is
possible to compare not only the affine transformati-
ons, but the locations of the features, additionally. In
this section, these restricted movements, and the com-
putations of the corresponding affine transformations
are introduced.
3.1 Rotation
In case of the rotation movement, the quadcopter
stays at the same position, and rotates around its verti-
cal axis. Thus, the translation vector of the movement
is equivalent to 0 all the time. The rotation matrices
between the images can be computed if the degrees
and center of the rotation are known. Example ima-
ges are given in Fig. 2. The first row shows the images
taken by the quadcopter, and the second row shows
colored boxes, which are related by affine transfor-
mations.
Let α
i
be the degree of rotation in radians, then the
rotation matrix is defined as follows:
R
i
=
cosα
i
−sinα
i
sinα
i
cosα
i
. (5)
This matrix describes the transformation of corre-
sponding affine shapes, in case of the rotation mo-
vement. Let us assume that corresponding feature
points in the images are given, then the relation of the
corresponding features can be expressed as follows:
p
f
i
= v +R
f
p
1
i
− v
, (6)
where p
f
p
, α
i
, v are the p-th feature location in the
f -th image, the degree of rotation between the first
1
Testing data are submitted as supplementary material.
to the f -th image and the center of rotation, respecti-
vely. The latter one is considered constant during the
rotation movement.
To estimate the degree and center of the rotation,
the Euclidean distances of the selected and estimated
features have to be minimized. The cost function des-
cribing the error of estimation is as follows:
F
∑
f =2
P
∑
i=1
p
f
i
− R
f
p
1
i
− v
− v
2
2
, (7)
where F and P are the number of frames and selected
features, respectively. The minimization can be sol-
ved by an alternation algorithm. The alternation itself
consist of two steps: (i) estimation of the center of
rotation v and (ii) estimation of rotation angles α
i
.
3.1.1 Estimation of Rotation Center
The problem of rotation center estimation can be for-
malized as Av = b, where
A =
R
2
− I
.
.
.
R
F
− I
,b =
R
2
p
1
1
− p
2
1
.
.
.
R
F
p
1
P
− p
F
p
. (8)
The optimal solution in the lest-squares sense is given
by the pseudo-inverse of A:
v =
A
T
A
−1
A
T
b (9)
3.1.2 Estimation of Rotating Angles
The rotation angles are separately estimated for each
image. The estimation can be written in a linear form
Cx = d subject to x
T
x = 1, where
C
cosα
i
sinα
i
= d. (10)
The coefficient matrix C and vector d are as follows:
C =
x
1
1
− u v − y
1
1
y
1
1
− v x
1
1
− u
.
.
.
.
.
.
x
1
P
− u v − y
1
P
y
1
P
− v x
1
P
− u
d =
x
f
1
− u
y
f
1
− v
.
.
.
x
f
P
− u
y
f
P
− v
, (11)
where
h
x
f
i
,y
f
i
i
T
= p
f
i
and [u,v]
T
= v.
The optimal solution for this problem is given by
one of the roots of a four degree polynomial as it is
written in the appendix.
Convergence. The steps described above are repeated
one after the other, iteratively. The speed of conver-
gence does not matter for our application. However,
we empirically found that it convergences after a few
Quantitative Affine Feature Detector Comparison based on Real-World Images Taken by a Quadcopter
707

(a) Example images from the sequence.
(b) Colored boxes indicate corresponding areas computed by the rotation parameters. Images are the same as in the first row.
Figure 2: Images are taken while the quadcopter is rotating around its vertical axis, while its position is fixed.
iterations, when the center of the image is used as the
initial value for the center of the rotation.
Ground Truth Affine Transformations. The affine
transformations are easy to determine: they are equal
to the rotation: A = R.
3.2 Uniform Motion: Front View
For this test case, the quadcopter moves along a
straight line and does not rotate. Thus, the rotation
matrix relative to the camera movement is equal to the
identity. The camera faces to the front, thus the Focus
of Expansion (FOE) can be computed. The FOE is
the projection of the spatial line of movement at the
infinity to the camera image. It is also an epipole in
the image, meaning that all epipolar lines intersect at
the FOE. The epipolar lines can be determined from
the projections of corresponding spatial points. Fig. 3
shows an example image sequence for this motion. In
the second row, the red dot indicates the calculated
FOE, and the blue lines mark the epipolar lines.
The maximum likelihood estimation of the FOE
can be solved by a numerical minimization of the sum
of squared orthogonal distances from the projected
points and the measured epipolar lines (Hartley and
Zisserman, 2003). Thus, the cost function to be mini-
mized contains the sum of all feature distance to the
related epipolar line. It can be formalized as follows:
F
∑
f =1
P
∑
i=1
p
f
i
− m
T
−sinβ
i
cosβ
i
2
, (12)
where m and β
i
are the FOE and the angle between
the epipolar line and the X axis. Note, that the ex-
pression [−sinβ
i
,cosβ
i
]
T
is the normal vector of the
i-th epipolar line. This cost function can be minimi-
zed with an alternation, iteratively refining the FOE
and angles of epipolar lines. The center of the image
is used as the initial value for the FOE, then the epi-
polar lines can be calculated as it is described in the
following subsection.
3.2.1 Estimation of Epipolar Lines
The epipolar lines intersect at the FOE, because a
pure translation motion is considered. Moreover, the
epipolar lines connecting corresponding features with
the FOE are the same along the images. Each angle
between the epipolar lines and the horizontal (image)
axis can be computed as a homogeneous system of
equations Ax = 0 with constraint x
T
x = 1 as follows:
A =
y
1
i
− m
y
m
x
− x
1
i
.
.
.
.
.
.
y
F
i
− m
y
m
x
− x
F
i
,x =
cosβ
i
sinβ
i
, (13)
where [m
x
,m
y
] = m and
h
x
f
i
,y
f
i
i
= p
f
i
are the coor-
dinates of the FOE and that of the selected features,
respectively.
The solution which minimizes the cost function is
obtained as the eigenvector (v) of the smallest eigen-
value of matrix A
T
A. Then, β
i
= atan2(v
y
,v
x
).
3.2.2 Estimation of the Focus of Expansion
The FOE is located where the epipolar lines of the
features intersect, thus the estimation of the FOE can
be formalized as a linear system of equations Am = b,
where
A =
−sinβ
1
cosβ
1
−sinβ
1
cosβ
1
.
.
.
.
.
.
−sinβ
1
cosβ
1
−sinβ
2
cosβ
2
.
.
.
.
.
.
.
.
.
.
.
.
−sinβ
N
cosβ
N
, (14)
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
708

(a) A few images of the sequence.
(b) Red dot marks the FOE, blue lines are the epipolar ones. Images are the same as in the first row.
Figure 3: The images are taken while the quadcopter is moving parallel to the ground.
and
b =
y
1
1
∗ cosβ
1
− x
1
1
sinβ
1
y
2
1
∗ cosβ
1
− x
2
1
sinβ
1
.
.
.
y
F
1
∗ cosβ
1
− x
F
1
sinβ
1
y
1
2
∗ cosβ
2
− x
1
2
sinβ
2
.
.
.
.
.
.
y
F
N
∗ cosβ
N
− x
F
N
sinβ
N
. (15)
This system of equations can be solved with the
Pseudo inverse of A. Thus v =
A
T
A
−1
Ab.
3.2.3 The Fundamental Matrix
The steps explained above are iteratively repeated
until convergence. The GT affine transformation is
impossible to compute in an unknown environment,
because it depends on the surface normal (Barath
et al., 2015), and the normals are varying from fe-
ature to feature. However, some constraints can be
achieved if the fundamental matrix is known. The
fundamental matrix describes the transformation of
epipolar lines between stereo images in a static envi-
ronment. It is the composition of the camera matrices
and the parameters of camera motion as follows:
F = K
−T
R[t]
x
K
−1
, (16)
where K, R and [t]
x
are the camera matrix, rotation
matrix and the matrix representation of the cross pro-
duct, respectively. The fundamental matrix can be
computed as F = [v]
x
from the FOE if the relative mo-
tion of cameras contains only translation (Hartley and
Zisserman, 2003). If the fundamental matrix for two
images is known, the closest valid affine transforma-
tion can be determined (Barath et al., 2016). These
closest ones are labelled as ground-truth transforma-
tions in our experiments. The details of the compa-
rison using the fundamental matrix can be found in
Sec. 4.2.
3.3 Uniform Motion: Bottom View
This motion is the same as described in the previous
section. However, the camera observes the ground,
instead of facing forward. Since the movement is pa-
rallel to the image plane, it can be considered as a de-
generative case of the previous one, because the FOE
is located at the infinity. In this scenario the features
of the ground are related by a pure translation between
the images as the ground is planar. The projections
of the same corresponding features form a line in the
camera images, but these epipolar lines are parallel to
each other, and also parallel to the motion of the quad-
copter. Fig. 4 shows example images of this motion
and colored boxes related by the affine transformati-
ons.
Let us denote the angle between the epipolar lines
and the X axis by γ, and l
i
denotes a point which lies
on the i-th epipolar line. The cost function to be mini-
mized contains the squared distances of the measured
points to the related epipolar lines:
F
∑
f =1
P
∑
i=1
p
f
i
− l
i
T
−sinγ
cosγ
2
. (17)
The alternation minimizes the error with refining the
angle of the epipolar lines (γ) first, then their points
(l
i
). The first part of the alternation can be written
as a homogeneous system of equations Ax = 0 with
respect to x
T
x = 1, similarly to Eq. 13, but it contains
all points for all images:
x
f
1
− l
1
x
y
f
1
− l
1
y
.
.
.
.
.
.
x
f
2
− l
2
x
y
f
2
− l
2
y
−sinγ
cosγ
= 0, (18)
the solution is obtained as the eigenvector of the smal-
lest eigenvalue of matrix A
T
A, then γ = atan2(v
x
,v
y
).
The second step of the alternation refines the
points located on the epipolar lines. The equation can
Quantitative Affine Feature Detector Comparison based on Real-World Images Taken by a Quadcopter
709

(a) Example images for uniform motion, bottom view.
(b) The colored boxes indicates the same areas computed by the motion parameters.
Figure 4: The images are taken while the quadcopter is moving forward.
be formed as Ax = b, where
cosγ sinγ
.
.
.
.
.
.
cosγ sinγ
l
i
x
l
i
y
=
x
i
cosγ + y
i
sinγ
.
.
.
x
i
cosγ + y
i
sinγ
,
(19)
the point on the line is given by the pseudoinverse of
A, l =
A
T
A
−1
Ab.
Ground Truth Affine Transformations The GT
affine transformations for forward motion with a
bottom-view camera is a simple identity:
A = I (20)
3.4 Scaling
This motion is generated by the sinking of the quad-
copter, while the camera observes the ground. The
direction of the motion is approximately perpendicu-
lar to the camera plane, thus this can be considered
as a special case of the Uniform Motion: Front View.
The only difference is that the ground can be conside-
red as a plane, thus the parameters of the motion and
the affine transformation can be precisely calculated.
Fig. 5 first row shows an example images captured
during the motion.
Because of the direction of the movement and the
camera plane are not perpendicular, the FOE and the
epipolar lines for the corresponding selected features
can be computed. It is also true, that during the sin-
king of the quadcopter, the features move along their
corresponding epipolar line. See Seq. 3.2 for the com-
putation of the FOE and epipolar lines.
The corresponding features are related in the ima-
ges by the parameter of the scaling. Let s be the sca-
ling parameter, then the distances between the featu-
res and the FOE are related by s. This can be forma-
lized as follows:
p
2
i
− v
= s
2
p
1
i
− v
i ∈ [1,P]. (21)
Thus, the parameter of the scale is given, by the
average of the fraction of the distances:
s
2
=
1
P
P
∑
i=1
p
2
i
− v
2
p
1
i
− v
2
. (22)
Ground Truth Affine Transformations. The GT af-
fine transformations for the scaling is trivially a sim-
ple scaled identity:
A
j
= sI (23)
4 EVALUATION METHOD
The evaluation of the feature detectors is twofold. In
the first comparison, the detection of features location
and affine parameters are evaluated. To compare the
feature locations and affine parameters, the camera
motion needs to be known. These can be calculated
for each motion described in the previous section, ho-
wever, for the Uniform Motion: Front View, it is not
possible. Thus, a second comparison is carried out,
which uses only the fundamental matrix instead of the
motion parameters.
4.1 Affine Evaluation
Location error. The location of the GT feature can
be determined by the location of the same feature in
the previous image, and the parameters of the motion.
The calculation of the motion parameter differs from
motion to motion, the details can be found in the re-
lated sections. The error of the feature detection is
the Euclidean distance of the GT and the estimated
feature:
Err
det
(P
estimated
,P
GT
) =
k
P
estimated
− P
GT
k
2
2
, (24)
where P
GT
, P
estimated
are the GT and estimated feature
points, respectively.
Affine Error. While the error of the feature detection
is based on the Euclidean distance, the error of affine
transformation is calculated using the Frobenius norm
of the difference matrix of the estimated and GT affine
transformation. It can be formalized as follows:
Err
a f f
(A
estimated
,A
GT
) =
k
A
estimated
− A
GT
k
F
,
(25)
where A
GT
,A
estimated
are the GT and estimated affine
transformations, respectively. The Frobenius norm
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
710

(a) Example images for the scaling test.
(b) The colored boxes indicate the same areas computed by the scaling parameters.
Figure 5: The images are taken while the quadcopter is sinking.
is chosen, because it has a geometrical meaning of
the related affine transformations, see (Barath et al.,
2016) for details.
4.2 Fundamental Matrix Evaluation
For the motion named as Uniform Motion: Front
View, the affine transformations and parameters of
the motion can not be estimated. The objects, which
are closer to the camera move more pixels between
the successive images, than objects located at the dis-
tance. Only the direction of the moving features can
be calculated. That is the epipolar line that goes
through the feature and the FOE. However, the funda-
mental matrix can be precisely calculated from FOE,
F = [v]
x
and it can be used to refine the affine trans-
formations.
The refined affine transformations are considered
as GT, and used for the calculation of affine errors, as
it is described in the previous section. (Barath et al.,
2016) introduced the algorithm to find the closest af-
fine transformations corresponding to the fundamen-
tal matrix. The paper states that it can be determi-
ned by solving a six-dimensional linear problem if the
Lagrange-multiplier technique is applied for the con-
straints for the fundamental matrix.
For quantifying the quality of an affine transfor-
mation, the closest valid affine transformation is com-
puted first by the method of (Barath et al., 2016).
Then the difference matrix between the original and
closest valid affine transformation is computed. The
quality is given by the Frobenius norm of this diffe-
rence matrix.
5 COMPARISON
Eleven affine feature detectors have been compared in
our tests. The implementations are downloaded from
the website of Visual Geometry Group, University of
Oxford
2
, except the TBMR, which is available on the
2
www.robots.ox.ac.uk/ vgg/research/affine/index.html
website of the author
3
. Most of the methods are intro-
duced in Sec. 2. Additionally to those, HARHES and
SEDGELAP are added to the comparison. HARHES
is the composition of HARAFF and HESAFF, while
SEDGELAP finds shapes along the edges, using the
Laplace operator.
After the features are extracted from the images,
feature matching is done considering SIFT descrip-
tors. The ratio test published in (Lowe, 2004) was
used for outlier filtering. Finally, the affine transfor-
mations are calculated for the filtered matches. The
detectors determine only the elliptical area of the af-
fine shapes, without orientation. The orientation is
assigned to the areas using the SIFT descriptor in a
separate step. Finally, the affine transformation of the
matched feature is given by:
A = A
2
R
2
(A
1
R
1
)
−1
, (26)
where A
i
,R
i
i ∈ [1, 2] are the local affine areas defined
by ellipses, and the related rotation matrices assigned
by the SIFT descriptor, respectively.
Table 1 summarizes the number of features, num-
ber of matched features and running time of the de-
tectors on the tests. SEDGELAP and HARHES find
the most features, however, the high number of fea-
tures makes the matching more complicated and time
consuming. In general, EBR, IBR and MSER find
hundreds of features, the Harris based methods (HA-
RAFF, HARLAP) find approximately ten to twenty
thousand, and the Hessian based methods (HESAFF,
HESLAP) find a few thousands of features. The ra-
tio test (Lowe, 2004), used for outlier filtering, exclu-
des some feature matches. The second row of each
test sequence in Table 1 shows the number of fea-
tures after matching and outlier filtering. Note, that
approximately 50% of features are lost due to the ra-
tio test. The running time of the methods are shown
in the third rows of each test sequence. These ti-
mes highly depend on the image resolution, which is
5MP in our tests. Each implementation was run on
the CPU, using one core of the machine. Obviously,
MSER is the fastest method, followed by SURF and
3
http://laurentnajman.org/index.php?page=tbmr
Quantitative Affine Feature Detector Comparison based on Real-World Images Taken by a Quadcopter
711
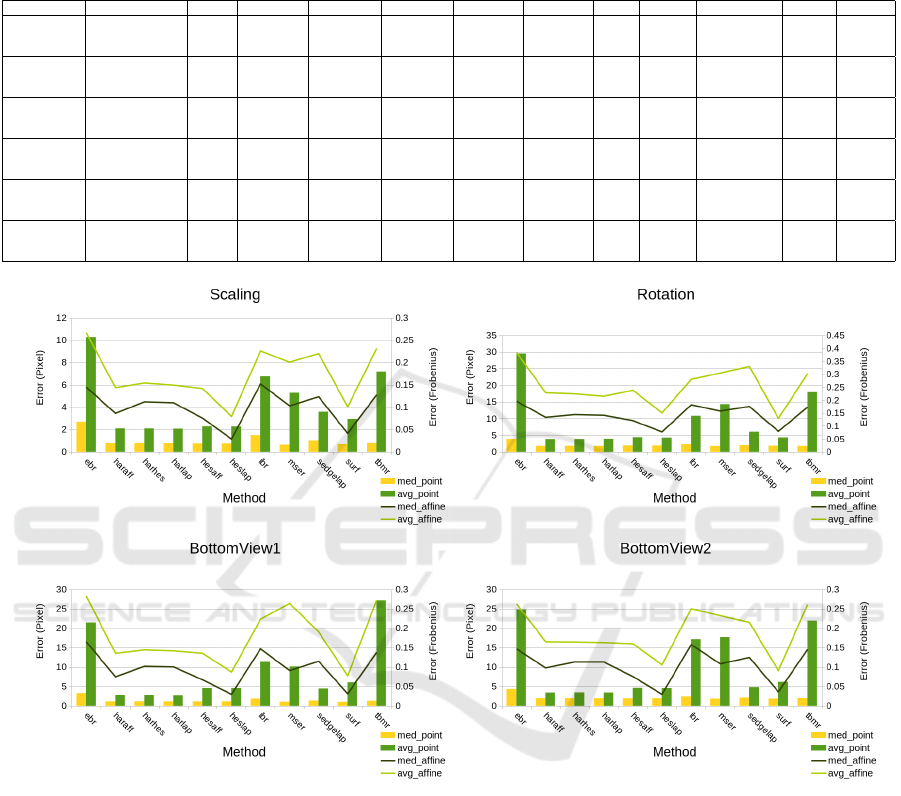
Table 1: Number of features, number of matched features and required running time for test sequences. The columns are the
methods and the rows (triplets) are the test sequences. First row of each sequence shows the number of detected features.
The number of matched features are shown in the second row. The third row of each test sequence contains the required
running times.
EBR HARAFF HARHES HARLAP HESAFF HESLAP IBR MSER SEDGELAP SURF TBMR
Scaling
# All 217 18720 21198 19033 3866 3994 1277 336 20132 783 4122
# Matched 91 8369 9544 8534 1702 1757 678 235 10071 636 2259
Running time (s) 20.43 3.27 2.32 2.06 1.19 0.97 7.59 0.41 3.29 0.65 0.68
Rotation
# All 114 12686 14266 12795 2655 2751 892 223 13173 508 3141
# Matched 33 5235 5943 5294 1070 1111 395 133 5872 390 1447
Running time (s) 18.01 2.21 1.69 1.56 0.91 0.77 6.27 0.35 2.41 0.54 0.54
Bottonview1
# All 59 7514 8122 7629 1211 1216 441 92 7222 204 2688
# Matched 27 3450 3730 3503 522 524 226 64 3743 169 1049
Running time (s) 18.09 1.69 1.37 1.30 0.80 0.73 5.52 0.38 1.85 0.51 0.67
Bottonview2
# All 26 12484 13020 12615 1119 1135 588 117 9461 139 3051
# Matched 8 4451 4681 4506 418 426 241 68 4094 107 1037
Running time (s) 20.49 2.22 1.65 1.64 0.78 0.72 5.25 0.36 2.11 0.57 0.95
FrontView1
# All 78 10128 13639 10415 4708 5032 695 233 14869 803 2083
# Matched 36 4623 6476 4758 2444 2583 416 164 7650 653 1058
Running time (s) 17.97 3.16 2.12 1.66 1.70 1.19 8.47 0.29 2.67 0.81 0.76
FrontView2
# All 59 9210 11193 9369 2108 2812 592 50 12345 511 1856
# Matched 30 4615 5764 4703 1192 1617 398 38 7275 447 1034
Running time (s) 15.56 2.07 1.65 1.48 1.01 0.87 6.58 0.29 2.31 0.65 0.55
Figure 6: The error of affine evaluation. The error of feature detection is measured in pixels, and can be seen on the left axis.
The error of affine transformations is given by the Frobenius norm, it is plotted on the right axis. The average and median
values for both the affine and detection errors are shown.
TBMR. The Hessian based methods need approxima-
tely 1 second to process an image, while Harris based
methods need 1.5 or 2 more times. The slowest are
IBR and EBR. Note that, by parallelism and/or GPU
implementations, the running times may show diffe-
rent results.
5.1 Affine Evaluation
The first evaluation uses the estimated camera moti-
ons and affine transformation introduced in Sec. 3.
The quantitative evaluation is twofold, since the lo-
calization of features and accuracy of affine transfor-
mation can both be evaluated.
Four test sequences are captured. One for the sca-
ling, one for the rotation and two for the Uniform Mo-
tion: Bottom View motions. See Fig. 2 for the rota-
tion, Fig. 5 for the scale, first row of Fig. 4 and Fig. 7
for the Uniform Motion: Bottom View test images.
Fig. 6 summarizes the errors for the detectors. The
average and median error of feature detection can be
seen on the bar-charts, where the left vertical axis
mark the Euclidean distance between the estimated
and GT feature, measured in pixels. The average and
median error of the affine transformations are visuali-
zed as green and black lines, respectively. The mea-
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
712
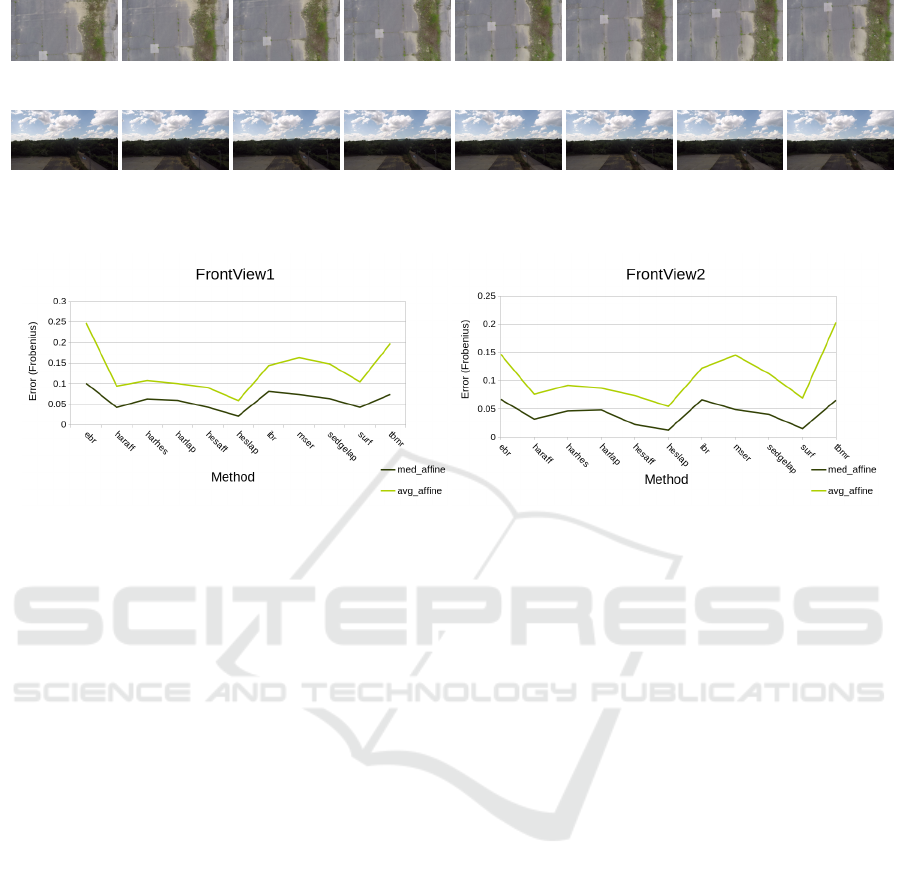
(a) Example images for the BottonView2 test.
(b) Example images for the FrontView test.
Figure 7: The images are taken while the quadcopter is moving parallel to the ground. First Row: The camera observes the
ground. Second row: It faces to the front.
Figure 8: The error of Fundamental Matrix Evaluation.
sure is given by the Frobenius norm of the difference
of the GT and estimated affine transformations. The
quantity of the error can be seen at the right vertical
axis of the charts.
The charts of Fig. 6 indicate similar results for
the test sequences. The detection error is always the
lowest for the Hessian and Harris based methods in
average, indicating that these methods can find featu-
res more accurately than others. This measure is the
highest for the EBR, IBR, MSER and TBMR. The
averages can even be higher than 10 pixels, except for
the scaling test case. Remark that the median values
are always lower than the averages, because despite of
the outlier filtering, the false matches can yield large
detection error, which distorts the averages. Surpri-
singly, the affine error of HESLAP and SURF is the
lowest, while that of the EBR, IBR and TBMR is the
highest in all test cases.
5.2 Fundamental Matrix Evaluation
In case of the fundamental matrix evaluation, the
quadcopter moves forward, perpendicular to the
image plane. Objects are located at different distan-
ces from the camera, thus the GT affine transforma-
tion and GT position of features can not be recovered.
In this comparison, the fundamental matrix is used to
refine the estimated affine transformations. Then, the
error is measured by Frobenius norm of the difference
matrix of the estimated and refined affine transforma-
tion.
Two test scenarios are considered. The example
images of the first one can be seen in Fig. 3, where the
height of the quadcopter was approximately 2 meters.
The images of the second scenario are shown in the
second row of Fig. 7, these images are taken at around
the top of the trees.
Fig. 8 shows the error of the affine transformati-
ons. Two test sequences are captured, each shows
similar result. The HARAFF, HARLAP and SURF
affine transformation yield the least affine errors. The
characteristic of the errors is similar to that in the pre-
vious comparison.
6 CONCLUSIONS
We have compared the most popular affine matcher
algorithms in this paper. The main novelty of our
study is that the comparisons have been carried out
on realistic images taken by a quadcopter. Our test
sequences consists of more complex test cases than a
simple homography estimation: rotation and scaling
appear in the test as well. As a side effect, point ma-
tchers has also been compared as affine matching is
impossible without point matching.
The most important conclusion of the tests that the
performance of the affine detectors do not depend on
the type of the sequence. Based on the results, the
authors of this paper suggest to apply Harris-based,
Quantitative Affine Feature Detector Comparison based on Real-World Images Taken by a Quadcopter
713

Hessian-based and SURF algorithm to retrieve high
quality affine transformations from image pairs.
ACKNOWLEDGEMENTS
EFOP-3.6.3-VEKOP-16-2017-00001: Talent Mana-
gement in Autonomous Vehicle Control Technologies
– The Project is supported by the Hungarian Govern-
ment and co-financed by the European Social Fund.
REFERENCES
Alcantarilla, P. F., Bartoli, A., and Davison, A. J. (2012).
Kaze features. In Fitzgibbon, A., Lazebnik, S., Pe-
rona, P., Sato, Y., and Schmid, C., editors, Computer
Vision – ECCV 2012, pages 214–227, Berlin, Heidel-
berg. Springer Berlin Heidelberg.
Barath, D., Matas, J., and Hajder, L. (2016). Accurate
closed-form estimation of local affine transformati-
ons consistent with the epipolar geometry. In Procee-
dings of the British Machine Vision Conference 2016,
BMVC 2016, York, UK, September 19-22, 2016.
Barath, D., Moln
´
ar, J., and Hajder, L. (2015). Optimal sur-
face normal from affine transformation. In VISAPP
2015 - Proceedings of the 10th International Confe-
rence on Computer Vision Theory and Applications,
Volume 3, Berlin, Germany, 11-14 March, 2015., pa-
ges 305–316.
Bay, H., Ess, A., Tuytelaars, T., and Van Gool, L. (2008).
Speeded-up robust features (surf). Comput. Vis. Image
Underst., 110(3):346–359.
Cordes, K., Rosenhahn, B., and Ostermann, J. (2013).
High-resolution feature evaluation benchmark. In
Wilson, R., Hancock, E., Bors, A., and Smith, W., edi-
tors, Computer Analysis of Images and Patterns, pages
327–334, Berlin, Heidelberg. Springer Berlin Heidel-
berg.
Harris, C. and Stephens, M. (1988). A combined corner
and edge detector. In In Proc. of Fourth Alvey Vision
Conference, pages 147–151.
Hartley, R. and Zisserman, A. (2003). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, New York, NY, USA, 2 edition.
Leutenegger, S., Chli, M., and Siegwart, R. Y. (2011).
Brisk: Binary robust invariant scalable keypoints. In
Proceedings of the 2011 International Conference on
Computer Vision, ICCV ’11, pages 2548–2555, Wa-
shington, DC, USA. IEEE Computer Society.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. Int. J. Comput. Vision, 60(2):91–
110.
Mikolajczyk, K. and Schmid, C. (2002). An affine invariant
interest point detector. In Heyden, A., Sparr, G., Niel-
sen, M., and Johansen, P., editors, Computer Vision
— ECCV 2002, pages 128–142, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman, A.,
Matas, J., Schaffalitzky, F., Kadir, T., and Gool, L. V.
(2005). A comparison of affine region detectors. In-
ternational Journal of Computer Vision, 65(1):43–72.
Pusztai, Z. and Hajder, L. (2017). Quantitative comparison
of affine invariant feature matching. In Proceedings of
the 12th International Joint Conference on Computer
Vision, Imaging and Computer Graphics Theory and
Applications (VISIGRAPP 2017) - Volume 6: VISAPP,
Porto, Portugal, February 27 - March 1, 2017., pages
515–522.
Shi, J. and Tomasi, C. (1994). Good features to track.
Tareen, S. A. K. and Saleem, Z. (2018). A comparative
analysis of sift, surf, kaze, akaze, orb, and brisk. In
International Conference on Computing, Mathematics
and Engineering Technologies (iCoMET).
Tuytelaars, T. and Mikolajczyk, K. (2008). Local invariant
feature detectors: A survey. Found. Trends. Comput.
Graph. Vis., 3(3):177–280.
Tuytelaars, T. and Van Gool, L. (2004). Matching widely
separated views based on affine invariant regions. In-
ternational Journal of Computer Vision, 59(1):61–85.
Xu, Y., Monasse, P., Graud, T., and Najman, L. (2014).
Tree-based morse regions: A topological approach to
local feature detection. IEEE Transactions on Image
Processing, 23(12):5612–5625.
Zitnick, L. and Ramnath, K. (2011). Edge foci interest
points. International Conference on Computer Vision.
APPENDIX
The goal is to show how the following equation:
Ax = b
can be solved subject to x
T
x = 1. The cost function
must be written with the so-called Lagrangian multi-
plier λ. It is as follows:
J = (Ax − b)
T
(Ax − b) + λx
T
x.
The optimal solution is given by the derivative of the
cost function w.r.t x.
∂J
∂x
= 2A
T
(Ax − b) + 2λx = 0.
Therefore the optimal solution is as follows:
x = (A
T
A + λI)
−1
A
T
b.
For the sake of simplicity, we introduce the vector v =
A
T
b and the symmetric matrix C = A
T
A, then:
x = (C + λI)
−1
v.
Finally, the constraint x
T
x = 1 has to be considered:
v
T
(C + λI)
−T
(C + λI)
−1
v = 1.
By definition, it can be written that:
(C + λI)
−1
=
ad j(C + λI)
det(C + λI)
.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
714

If
C =
c
1
c
2
c
3
c
4
,
then
C + λI =
c
1
+ λ c
2
c
3
c
4
+ λ
The determinant and adjoint matrix of C + λI can be
written as:
det(C + λI) = (c
1
+ λ)(c
4
+ λ) − c
2
c
3
and
ad j(C + λI) =
c
4
+ λ −c
2
−c
3
c
1
+ λ
c
4
+ λ −c
2
−c
3
c
1
+ λ
v
1
v
2
=
v
1
λ + c
4
v
1
− c
2
v
2
v
2
λ + c
1
v
2
− c
3
v
1
.
Furthermore, the expression v
T
(C + λI)
−T
(C +
λI)
−1
v = 1 can be rewritten as
v
T
ad j
T
(C + λI)ad j(C + λI)
det(C + λI)det(C + λI)
v = 1,
v
T
ad j
T
(C + λI)ad j(C + λI)v = det
2
(C + λI).
Both sides of the equation contain polynomials.
The degrees of the left and right sides are 2n − 2 and
2n, respectively. If the expression in the sides are
subtracted by each other, a polynomial of degree 2n
is obtained. Note that, n = 2 in the discussed case,
i.e planar motion. The optimal solution is obtained
as the real roots of this polynomial. The vector cor-
responding to the estimated λ
i
, i ∈ 1, 2, is calculated
as g
i
= (L + λ
i
I)
−1
r. Then the vector with minimal
norm
k
Fg
i
− h
k
is selected as the optimal solution of
the problem.
Quantitative Affine Feature Detector Comparison based on Real-World Images Taken by a Quadcopter
715
