
Semantic Image Inpainting through Improved Wasserstein Generative
Adversarial Networks
Patricia Vitoria
*
, Joan Sintes
*
and Coloma Ballester
Department of Information and Communication Technologies, University Pompeu Fabra, Barcelona, Spain
Keywords:
Generative Models, Wasserstein GAN, Image Inpainting, Semantic Understanding.
Abstract:
Image inpainting is the task of filling-in missing regions of a damaged or incomplete image. In this work
we tackle this problem not only by using the available visual data but also by incorporating image semantics
through the use of generative models. Our contribution is twofold: First, we learn a data latent space by
training an improved version of the Wasserstein generative adversarial network, for which we incorporate a
new generator and discriminator architecture. Second, the learned semantic information is combined with
a new optimization loss for inpainting whose minimization infers the missing content conditioned by the
available data. It takes into account powerful contextual and perceptual content inherent in the image itself.
The benefits include the ability to recover large regions by accumulating semantic information even it is
not fully present in the damaged image. Experiments show that the presented method obtains qualitative
and quantitative top-tier results in different experimental situations and also achieves accurate photo-realism
comparable to state-of-the-art works.
1 INTRODUCTION
The goal of image inpainting methods is to recover
missing information of occluded, missing or corrup-
ted areas of an image in a realistic way, in the sense
that the resulting image appears as of a real scene. Its
applications are numerous and range from the auto-
matization of cinema post-production tasks enabling,
e.g., the deletion of annoying objects, to new view
synthesis generation for, e.g., broadcasting of sport
events. Interestingly, it is a pervasive and easy task
for a human to infer hidden areas of an image. Given
an incomplete image, our brain unconsciously recon-
structs the captured real scene by completing the gaps
(called holes or inpainting masks in the inpainting li-
terature). On the one hand, it is acknowledged that lo-
cal geometric processes and global ones (such as the
ones associated to geometry-oriented and exemplar-
based models, respectively) are leveraged in the hu-
mans’ completion phenomenon. On the other hand,
humans use the experience and previous knowledge
of the surrounding world to infer from memory what
fits the context of a missing area. Figure 1 displays
two examples of it; looking at the image in Figure
1(a), our experience indicates that one or more cen-
*
These two authors contributed equally
(a) (b)
(c) (d)
Figure 1: Qualitative illustration of the task. Given the visi-
ble content in (a), our experience indicates that one or more
central doors would be expected in such incomplete buil-
ding. Thus, a plausible completion would be the one of (b).
Also, our brain automatically completes the image in (c)
with a face such as (d).
tral doors would be expected in such an incomplete
building and, thus, a plausible completion would be
the one of (b). Also, our trained brain automatically
completes Figure 1(c) with the missing parts of a face
such as the one shown in (d).
Mostly due to its inherent ambiguity and to the
complexity of natural images, the inpainting problem
remains theoretically and computationally challen-
Vitoria, P., Sintes, J. and Ballester, C.
Semantic Image Inpainting through Improved Wasserstein Generative Adversarial Networks.
DOI: 10.5220/0007367902490260
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 249-260
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
249

ging, specially if large regions are missing. Classi-
cal methods use redundancy of the incomplete input
image: smoothness priors in the case of geometry-
oriented approaches and self-similarity principles in
the non-local or exemplar-based ones. Instead, using
the terminology of (Pathak et al., 2016; Yeh et al.,
2017), semantic inpainting refers to the task of infer-
ring arbitrary large missing regions in images based
on image semantics. Applications such as the identi-
fication of different objects which were jointly occlu-
ded in the captured scene, 2D to 3D conversion, or
image editing (in order to, e.g., removing or adding
objects and changing the object category) could be-
nefit from accurate semantic inpainting methods. Our
work fits in this context. We capitalize on the under-
standing of more abstract and high level information
that unsupervised learning strategies may provide.
Generative methods that produce novel samples
from high-dimensional data distributions, such as
images, are finding widespread use, for instance in
image-to-image translation (Zhu et al., 2017a; Liu
et al., 2017), image synthesis and semantic manipu-
lation (Wang et al., ), to mention but a few. Currently
the most prominent approaches include autoregres-
sive models (van den Oord et al., ), variational au-
toencoders (VAE) (Kingma and Welling, 2013), and
generative adversarial networks (Goodfellow et al.,
2014). Generative Adversarial Networks (GANs) are
often credited for producing less burry outputs when
used for image generation. It consists of a framework
for training generative parametric models based on
a game between two networks: a generator network
that produces synthetic data from a noise source and a
discriminator network that differentiates between the
output of the genererator and true data. The approach
has been shown to produce high quality images and
even videos (Zhu et al., 2017b; Pumarola et al., 2018;
Chan et al., 2018).
We present a new method for semantic image in-
painting with an improved version of the Wasserstein
GAN (Arjovsky et al., 2017) including a new gene-
rator and discriminator architectures and a novel op-
timization loss in the context of semantic inpainting
that outperforms related approaches. More precisely,
our contributions are summarized as follows:
• We propose several improvements to the architec-
ture based on an improved WGAN such as the in-
troduction of the residual learning framework in
both the generator and discriminator, the removal
of the fully connected layers on top of convoluti-
onal features and the replacement of the widely
used batch normalization by a layer normaliza-
tion. These improvements ease the training of the
networks making them to be deeper and stable.
(a)
(b)
(c)
(d)
Figure 2: Image inpainting results using three different ap-
proaches. (a) Input images, each with a big hole or mask.
(b) Results obtained with the non-local method (Fedorov
et al., 2015). (c) Results with the local method (Getreuer,
2012). (d) Our semantic inpainting method.
• We define a new optimization loss that takes into
account, on the one side, the semantic information
inherent in the image, and, on the other side, con-
textual information that capitalizes on the image
values and gradients.
• We quantitatively and qualitatively show that our
proposal achieves top-tier results on two datasets:
CelebA and Street View House Numbers.
The remainder of the paper is organized as follows. In
Section 2, we review the related state-of-the-art work
focusing first on generative adversarial networks and
then on inpainting methods. Section 3 details our
whole method. In Section 4, we present both quan-
titative and qualitative assessments of all parts of the
proposed method. Section 5 concludes the paper.
2 RELATED WORK
Generative Adversarial Networks. GAN learning
strategy (Goodfellow et al., 2014) is based on a game
theory scenario between two networks, the genera-
tor’s network and the discriminator’s network, having
adversarial objectives. The generator maps a source
of noise from the latent space to the input space and
the discriminator receives either a generated or a real
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
250

image and must distinguish between both. The goal
of this training procedure is to learn the parameters
of the generator so that its probability distribution is
as closer as possible to the one of the real data. To
do so, the discriminator D is trained to maximize the
probability of assigning the correct label to both real
examples and samples from the generator G, while
G is trained to fool the discriminator and to minimize
log(1−D(G(z))) by generating realistic examples. In
other words, D and G play the following min-max
game with value function V (G, D) defined as follows:
min
G
max
D
V (D, G) =
E
x∼P
data
(x)
[logD(x)]
+
E
z∼p
z
(z)
[log(1 − D(G(z)))]
(1)
The authors of (Radford et al., 2015) introduced con-
volutional layers to the GANs architecture, and pro-
posed the so-called Deep Convolutional Generative
Adversarial Network (DCGAN). GANs have been
applied with success to many specific tasks such as
image colorization (Cao, 2017), text to image synthe-
sis (Reed et al., 2016), super-resolution (Ledig et al.,
2017), image inpainting (Yeh et al., 2017; Burlin
et al., 2017; Demir and
¨
Unal, 2018), and image gene-
ration (Radford et al., 2015; Mao et al., 2017; Gulra-
jani et al., 2017; Nguyen et al., 2016), to name a few.
However, three difficulties still persist as challenges.
One of them is the quality of the generated images and
the remaining two are related to the well-known insta-
bility problem in the training procedure. Indeed, two
problems can appear: vanishing gradients and mode
collapse.
Vanishing gradients are specially problematic
when comparing probability distributions with non-
overlapping supports. If the discriminator is able to
perfectly distinguish between real and generated ima-
ges, it reaches its optimum and thus the generator
no longer improves the generated data. On the other
hand, mode collapse happens when the generator only
encapsulates the major nodes of the real distribution,
and not the entire distribution. As a consequence, the
generator keeps producing similar outputs to fool the
discriminator.
Aiming a stable training of GANs, several aut-
hors have promoted the use of the Wasserstein GAN
(WGAN). WGAN minimizes an approximation of the
Earth-Mover (EM) distance or Wasserstein-1 metric
between two probability distributions. The EM dis-
tance intuitively provides a measure of how much
mass needs to be transported to transform one dis-
tribution into the other distribution. The authors of
(Arjovsky et al., 2017) analyzed the properties of this
distance. They showed that one of the main bene-
fits of the Wasserstein distance is that it is continuous.
This property allows to robustly learn a probability
distribution by smoothly modifying the parameters
through gradient descend. Moreover, the Wasserstein
or EM distance is known to be a powerful tool to com-
pare probability distributions with non-overlapping
supports, in contrast to other distances such as the
Kullback-Leibler divergence and the Jensen-Shannon
divergence (used in the DCGAN and other GAN ap-
proaches) which produce the vanishing gradients pro-
blem, as mentioned above. Using the Kantorovich-
Rubinstein duality, the Wasserstein distance between
two distributions, say a real distribution P
real
and an
estimated distribution P
g
, can be computed as
W (P
real
, P
g
) = supE
x∼P
real
[ f (x)] − E
x∼P
g
[ f (x)] (2)
where the supremum is taken over all the 1-Lipschitz
functions f (notice that, if f is differentiable, it im-
plies that k∇ f k ≤ 1). Let us notice that f in Equation
(2) can be thought to take the role of the discriminator
D in the GAN terminology. In (Arjovsky et al., 2017),
the Wasserstein GAN is defined as the network whose
parameters are learned through optimization of
min
G
max
D∈D
E
x∼P
real
[D(x)] − E
x∼P
G
[D(x)] (3)
where D denotes the set of 1-Lipschitz functions. Un-
der an optimal discriminator (called a critic in (Ar-
jovsky et al., 2017)), minimizing the value function
with respect to the generator parameters minimizes
W (P
real
, P
g
). To enforce the Lipschitz constraint, the
authors proposed to use an appropriate weight clip-
ping. The resulting WGAN solves the vanishing pro-
blem, but several authors (Gulrajani et al., 2017; Ad-
ler and Lunz, 2018) have noticed that weight clip-
ping is not the best solution to enforce the Lipschitz
constraint and it causes optimization difficulties. For
instance, the WGAN discriminator ends up learning
an extremely simple function and not the real dis-
tribution. Also, the clipping threshold must be pro-
perly adjusted. Since a differentiable function is 1-
Lipschitz if it has gradient with norm at most 1 every-
where, (Gulrajani et al., 2017) proposed an alternative
to weight clipping: To add a gradient penalty term
constraining the L
2
norm of the gradient while opti-
mizing the original WGAN during training.
Recently, the Banach Wasserstein GAN (BW-
GAN) (Adler and Lunz, 2018) has been proposed ex-
tending WGAN implemented via a gradient penalty
term to any separable complete normed space. In this
work we leverage the mentioned WGAN (Gulrajani
et al., 2017) improved with a new design of the gene-
rator and discriminator architectures.
Image Inpainting. Most inpainting methods found
in the literature can be classified into two groups:
Semantic Image Inpainting through Improved Wasserstein Generative Adversarial Networks
251

model-based approaches and deep learning approa-
ches. In the former, two main groups can be dis-
tinguished: local and non-local methods. In local
methods, also denoted as geometry-oriented methods,
images are modeled as functions with some degree
of smoothness. (Masnou and Morel, 1998; Chan and
Shen, 2001; Ballester et al., 2001; Getreuer, 2012;
Cao et al., 2011). These methods show good perfor-
mance in propagating smooth level lines or gradients,
but fail in the presence of texture or for large missing
regions. Non-local methods (also called exemplar-
or patch-based) exploit the self-similarity prior by
directly sampling the desired texture to perform the
synthesis (Efros and Leung, 1999; Demanet et al.,
2003; Criminisi et al., 2004; Wang, 2008; Kawai
et al., 2009; Aujol et al., 2010; Arias et al., ; Hu-
ang et al., 2014; Fedorov et al., 2016). They provide
impressive results in inpainting textures and repeti-
tive structures even in the case of large holes. Howe-
ver, both type of methods use redundancy of the in-
complete input image: smoothness priors in the case
of geometry-based and self-similarity principles in
the non-local or patch-based ones. Figures 2(b) and
(c) illustrate the inpainting results (the inpaining hole
is shown in (a)) using a local method (in particular
(Getreuer, 2012)) and the non-local method (Fedorov
et al., 2015), respectively. As expected, the use of
image semantics improve the results, as shown in (d).
Current state-of-the-art is based on deep learning
approaches (Yeh et al., 2017; Demir and
¨
Unal, 2018;
Pathak et al., 2016; Yang et al., 2017; Yu et al., ). (Pat-
hak et al., 2016) modifies the original GAN architec-
ture by inputting the image context instead of random
noise to predict the missing patch. They proposed
an encoder-decoder network using the combination of
the L
2
loss and the adversarial loss and applied adver-
sarial training to learn features while regressing the
missing part of the image. (Yeh et al., 2017) propo-
ses a method for semantic image inpainting, which
generates the missing content by conditioning on the
available data given a trained generative model. In
(Yang et al., 2017), a method is proposed to tackle
inpainting of large parts on large images. They adapt
multi-scale techniques to generate high-frequency de-
tails on top of the reconstructed object to achieve high
resolution results. Two recent works (Li et al., 2017;
Iizuka et al., 2017) add a discriminator network that
considers only the filled region to emphasize the ad-
versarial loss on top of the global GAN discriminator
(G-GAN). This additional network, which is called
the local discriminator (L-GAN), facilitates exposing
the local structural details. Also, (Demir and
¨
Unal,
2018) designs a discriminator that aggregates the lo-
cal and global information by combining a G-GAN
and a Patch-GAN that first shares network layers and
later uses split paths with two separate adversarial los-
ses in order to capture both local continuity and holis-
tic features in the inpainted images.
3 PROPOSED METHOD
Our semantic inpainting method is built on two main
blocks: First, given a dataset of (non-corrupted) ima-
ges, we train an improved version of the Wasserstein
GAN to implicitly learn a data latent space to subse-
quently generate new samples from it. Then, given
an incomplete image and the previously trained ge-
nerative model, we perform an iterative minimization
procedure to infer the missing content of the incom-
plete image by conditioning on the known parts of the
image. This procedure consists of the search of the
closed encoding of the corrupted data in the latent ma-
nifold by minimization of a new loss which is made
of a combination of contextual, through image values
and image gradients, and prior losses.
3.1 Improved Wasserstein Generative
Adversarial Network
Our improved WGAN is built on the WGAN by (Gul-
rajani et al., 2017), on top of which we propose se-
veral improvements. As mentioned above, the big
counterpart of the generative models is their training
instability which is very sensible not only to the ar-
chitecture but also to the training procedure. In order
to improve the stability of the network we propose se-
veral changes in its architecture. In the following we
explain them in detail:
• First, network depth is of crucial importance in
neural network architectures; using deeper net-
works more complex, non-linear functions can be
learned, but deeper networks are more difficult to
train. In contrast to the usual model architectures
of GANs, we have introduced in both the genera-
tor and discriminator the residual learning frame-
work which eases the training of these networks,
and enables them to be substantially deeper and
stable. The degradation problem occurs when as
the network depth increases, the accuracy satura-
tes (which might be unsurprising) and then degra-
des rapidly. Unexpectedly, such degradation is not
caused by overfitting, and adding more layers to a
suitably deep model leads to higher training er-
rors (He et al., 2016). For that reason we have
introduced residual blocks in our model. Instead
of hoping each sequence of layers to directly fit a
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
252

Figure 3: Overview of the architecture of our improved WGAN. Top: generator and discriminator architectures (left and right,
respectively). Bottom: corresponding residual block strategies
desired mapping, we explicitly let these layers fit
a residual mapping. Therefore, the input x of the
residual block is recast into F(x)+x at the output.
At the bottom of Figure 3, the layers that make up
a residual block in our model are displayed.
• Second, to eliminate fully connected layers on top
of convolutional features is a widely used appro-
ach. Instead of using fully connected layers we
directly connect the highest convolutional featu-
res to the input and the output, respectively, of the
generator and discriminator. The first layer of our
GAN generator, which takes as input a sample z
of a normalized Gaussian distribution, could be
called fully connected as it is just a matrix multi-
plication, but the result is reshaped into a four by
four 512-dimensional tensor and used as the start
of the convolution stack. In the case of the discri-
minator, the last convolution layer is flattened into
a single scalar. Figure 3 displays a visualization of
the architecture of the generator (top left) and of
the discriminator (top right).
• Third, most previous GAN implementations use
batch normalization in both the generator and the
discriminator to help stabilize training. However,
batch normalization changes the form of the dis-
criminator’s problem from mapping a single input
to a single output to mapping from an entire batch
of inputs to a batch of outputs (Salimans et al., ).
Since we penalize the norm of the gradient of the
critic (or discriminator) with respect to each input
independently, and not the entire batch, we omit
batch normalization in the critic. To not introduce
correlation between samples, we use layer norma-
lization (Ba et al., 2016) as a drop-in replacement
for batch normalization in the critic.
• Finally, the ReLU activation is used in the gene-
rator with the exception of the output layer which
uses the Tanh function. Within the discriminator
we also use ReLu activation. This is in contrast to
the DCGAN, which makes use of the LeakyReLu.
3.2 Semantic Image Completion
Once we have trained our generative model until the
data latent space has been properly estimated from
uncorrupted data, we perform semantic image com-
pletion. After training the generator G and the discri-
minator (or critic) D, G is able to take a random vector
z drawn from p
z
and generate an image mimicking
samples from P
real
. The intuitive idea is that if G
is efficient in its representation, then, an image that
does not come from P
real
, such as a corrupted image,
should not lie on the learned encoding manifold of z.
Therefore, our aim is to recover the encoding ˆz that is
closest to the corrupted image while being constrai-
ned to the manifold. Then, when ˆz is found, we can
restore the damaged areas of the image by using our
trained generative model G on ˆz.
We formulate the process of finding ˆz as an opti-
mization problem. Let y be a damaged image and M
a binary mask of the same spatial size as the image,
where the white pixels (M(i) = 1) determine the un-
corrupted areas of y. Figure 5(c) shows two different
masks M corresponding to different corrupted regi-
ons (the black pixels): A central square on the left
and three rectangular areas on the right. We define
the closest encoding ˆz as the optimum of following
optimization problem with the new loss:
ˆz = arg min
z
{αL
c
(z|y, M) + βL
g
(z|y, M) + ηL
p
(z)}
(4)
where α, β, η > 0, L
c
and L
g
are contextual losses
constraining the generated image by the input corrup-
ted image y on the regions with available data given
by M, and L
p
denotes the prior loss. In particular, the
contextual loss L
c
constrains the image values and the
gradient loss L
g
is designed to constraint the image
Semantic Image Inpainting through Improved Wasserstein Generative Adversarial Networks
253
gradients. More precisely, the contextual loss L
c
is
defined as the L
1
norm between the generated sam-
ples G(z) and the uncorrupted parts of the input image
y weighted in such a way that the optimization loss
pays more attention to the pixels that are close to the
corrupted area when searching for the optimum enco-
ding ˆz.
To do so, for each uncorrupted pixel i in the image
domain, we define its weight W (i) as
W (i) =
∑
j∈N
i
(1 − M( j))
|N
i
|
i f M(i) 6= 0
0 i f M(i) = 0
(5)
where N
i
denotes a local neighborhood or window
centered at i, and |N
i
| denotes its cardinality, i.e., the
area (or number of pixels) of N
i
. This weighting term
was also used by (Yeh et al., 2017). In order to pro-
vide a comparison with them, we use the same win-
dow size of 7x7 in all the experiments. Finally, we
define the contextual loss L
c
as
L
c
(z|y, M) = W kM(G(z) − y)k (6)
Our gradient loss L
g
represents also a contextual term
and it is defined as the L
1
-norm of the difference bet-
ween the gradient of the uncorrupted portion and the
gradient of the recovered image, that is,
L
g
(z|y, M) = W kM(∇G(z) − ∇y)k (7)
where ∇ denotes the gradient operator. The idea be-
hind the proposed gradient loss is to constrain the
structure of the generated image given the structure
of the input corrupted image. The benefits are speci-
ally noticeable for a sharp and detailed inpainting of
large missing regions which typically contain some
kind of structure (e.g. nose, mouth, eyes, texture, etc,
in the case of faces). In contrast, the contextual loss
L
c
gives the same importance to the homogeneous zo-
nes and structured zones and it is in the latter where
the differences are more important and easily appre-
ciated. In practice, the image gradient computation
is approximated by central finite differences. In the
boundary of the inpainting hole, we use either for-
ward or backward differences depending on whether
the non-corrupted information is available.
Finally, the prior loss L
p
is defined such as it fa-
vours realistic images, similar to the samples that are
used to train our generative model, that is,
L
p
(z) = −D
w
(G
θ
(z)) (8)
where D
w
is the output of the discriminator D with
parameters w given the image G
θ
(z) generated by the
generator G with parameters θ and input vector z. In
other words, the prior loss is defined as our second
WGAN loss term in (3) penalizing unrealistic ima-
ges. Without L
p
the mapping from y to z may con-
verge to a perceptually implausible result. Therefore
z is updated to fool the discriminator and make the
corresponding generated image more realistic.
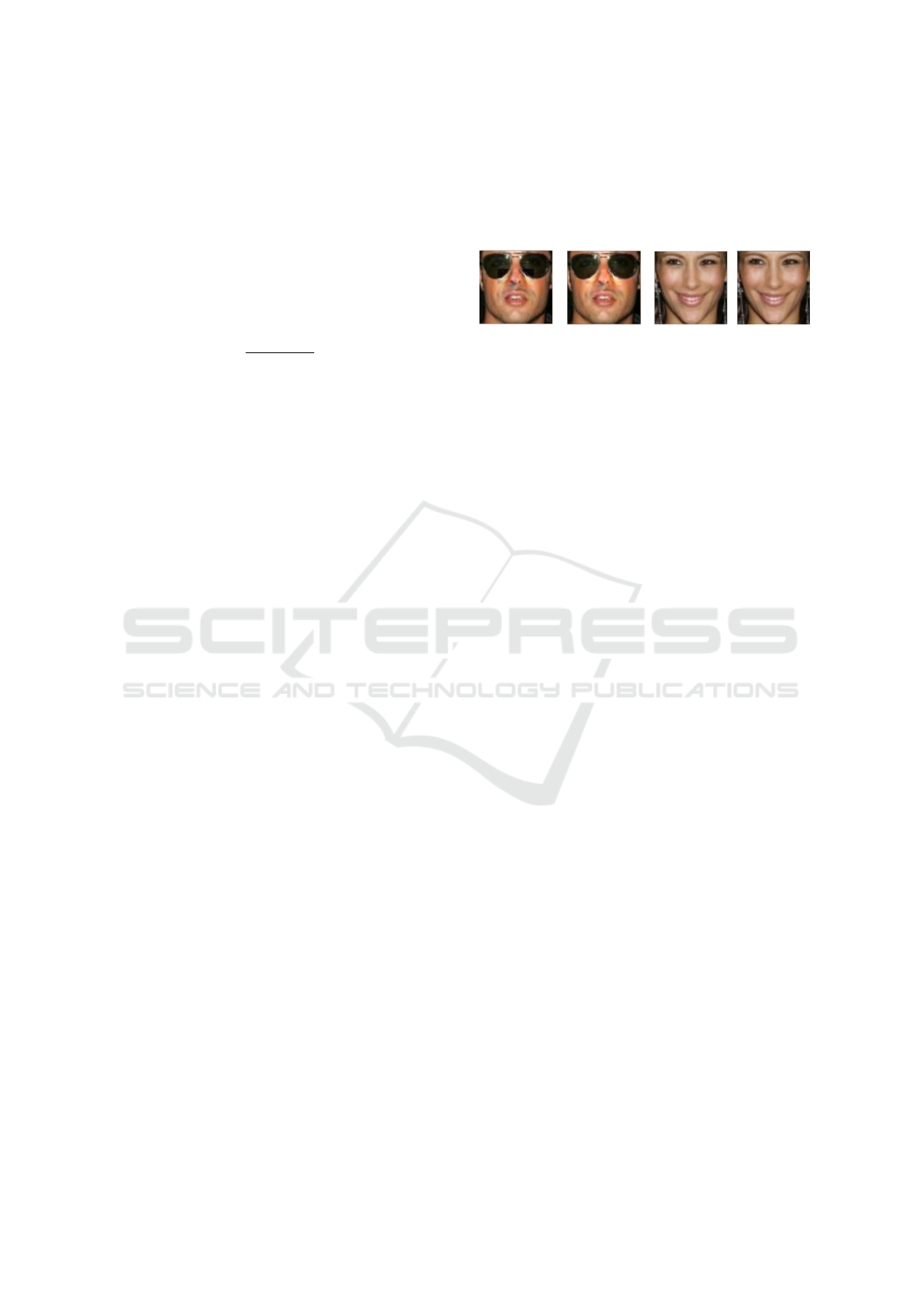
(a) (b) (c) (d)
Figure 4: (b) and (d) show the results obtained after ap-
plying Poisson editing (equation (9) in the text) to the in-
painting results shown in (a) and (c), respectively.
The parameters α, β and η in equation (4) allow
to balance among the three losses. The selected pa-
rameters are α = 0.1, β = 1 − α and η = 0.5 but
for the sake of a thorough analysis we present in Ta-
bles 1 and 2 an ablation study of our contributions.
With the defined contextual, gradient and prior los-
ses, the corrupted image can be mapped to the clo-
sest z in the latent representation space, denoted by
ˆz. z is randomly initialized with Gaussian noise of
zero mean and unit standard deviation and updated
using back-propagation on the total loss given in the
equation (4). Once G(ˆz) is generated, the inpainting
result can be obtained by overlaying the uncorrupted
pixels of the original damaged image to the generated
image. Even so, the reconstructed pixels may not ex-
actly preserve the same intensities of the surrounding
pixels although the content and structure is correctly
well aligned. To solve this problem, a Poisson editing
step (P
´
erez et al., ) is added at the end of the pipeline
in order to reserve the gradients of G(ˆz) without mis-
matching intensities of the input image y. Thus, the
final reconstructed image ˆx is equal to:
ˆx = argmin
x
k∇x − ∇G(ˆz)k
2
2
such that x(i) = y(i) if M(i) = 1
(9)
Figure 4 shows an example where visible seams are
appreciated in (a) and (c), but less in (b) and (d) after
applying (9).
4 EXPERIMENTAL RESULTS
In this section we evaluate the proposed method both
qualitatively and quantitatively by using different eva-
luation metrics. We compare our results with the re-
sults obtained by (Yeh et al., 2017) as both algorithms
use first a GAN procedure to learn semantic informa-
tion from a dataset and, second, combine it with an
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
254

(a)
(b)
(c)
Figure 5: (a) Samples from CelebA training dataset. (b)
Samples from SVHN training dataset. (c) Two masks M
used in our experiments corresponding to different corrup-
ted regions (the black pixels): A central square on the left
and three rectangular areas on the right.
optimization loss for inpainting in order to infer the
missing content. In order to perform an ablation study
of all our contributions, we present the results obtai-
ned not only by using the original algorithm by (Yeh
et al., 2017) but also the results obtained by adding
our new gradient-based term L
g
(z|y, M) to their origi-
nal inpainting loss, and varying the trade-off between
the different loss terms (weights α, β, η).
In the training step of our algorithm, we use the
proposed architecture (see Section 3.1) where the
generative model takes a random vector, of dimen-
sion 128, drawn from a normal distribution. In con-
trast, (Yeh et al., 2017) uses the DCGAN architec-
ture where the generative model takes a random 100
dimensional vector following a uniform distribution
between [−1, 1]. For all the experiments we use: A
fixed number of iterations equal to 50000, batch size
equal to 64, learning rate equal to 0.0001 and expo-
nential decay rate for the first and second moment es-
timates in the Adam update technique, β
1
= 0, 0 and
β
2
= 0, 9, respectively. To increase the amount of trai-
ning data we also performed data augmentation by
randomly applying a horizontal flipping on the trai-
ning set. Training the generative model required three
days using an NVIDIA TITAN X GPU.
In the inpainting step, the window size used to
compute W(i) in (5) is fixed to 7x7 pixels. In our al-
gorithm, we use back-propagation to compute ˆz in the
latent space. We make use of an Adam optimizer and
restrict z to [−1, 1] in each iteration, which we found
it produces more stable results. In that stage we used
the Adam hyperparameters learning rate, α, equal to
0.03 and the exponential decay rate for the first and
second moment estimates, β
1
= 0, 9 and β
2
= 0, 999,
respectively. After initializing with a random 128 di-
mensional vector z drawn from a normal distribution,
we perform 1000 iterations.
The assessment is given on two different data-
sets in order to check the robustness of our method:
the CelebFaces Attributes Datases (Liu et al., 2015)
and the Street View House Numbers (SVHN) (Netzer
et al., ). CelebA dataset contains a total of 202.599
celebrity images covering large pose variations and
background clutter. We split them into two groups:
201,599 for training and 1,000 for testing. In con-
trast, SVHN contains only 73,257 training images
and 26,032 testing images. SVHN images are not
aligned and have different shapes, sizes and back-
grounds. The images of both datasets have been crop-
ped with the provided bounding boxes and resized to
only 64x64 pixel size. Figure 5(a)-(b) displays some
samples from these datasets.
Let us remark that we have trained the proposed
improved WGAN by using directly the images from
the datasets without any mask application. After-
wards, our semanting inpainting method is evaluated
on both datasets using the inpainting masks illustra-
ted in Figure 5(c). Notice that our algorithm can be
applied to any type of inpainting mask.
Qualitative Assessment. We separately analyze each
step of our algorithm: The training of the genera-
tive model and the minimization procedure to infer
the missing content. Since the inpainting optimum of
the latter strongly depends on what the generative mo-
del is able to produce, a good estimation of the data
latent space is crucial for our task. Figure 6 shows
some images generated by our generative model trai-
ned with the CelebA and SVHN, respectively. Notice
that the CelebA dataset is better estimated due to the
fact that the number of images as well as the diver-
sity of the dataset directly affects the prediction of the
latent space and the estimated underlying probability
density function (pdf). In contrast, as bigger the va-
riability of the dataset, more spread is the pdf which
difficult its estimation.
To evaluate our inpainting method we compare it
Semantic Image Inpainting through Improved Wasserstein Generative Adversarial Networks
255

Figure 6: Some images generated by our generative model using the CelebA and the SVHN dataset as training set, respectively.
The CelebA dataset contains around 200k training images which are aligned and preprocessed to reduce the diversity between
samples. The SVHN dataset contains 73.257 training images. In this case, no pre-processing to reduce the diversity between
samples has been applied. Notice that both datasets have been down-sampled to 64x64 pixel size before training.
with the semantic inpainting method of (Yeh et al.,
2017). Some qualitative results are displayed in Figu-
res 7 and 8. Focusing on the CelebA results (Figure
7), obviously (Yeh et al., 2017) performs much better
than local and non-local methods (Figure 2) since it
also makes use of generative models. However, alt-
hough that method is able to recover the semantic in-
formation of the image and infer the content of the
missing areas, in some cases it keeps producing re-
sults with lack of structure and detail which can be
caused either by the generative model or by the proce-
dure to search the closest encoding in the latent space.
We will further analyze it with a quantitative ablation
study of our contributions. Since our method takes
into account not only the pixel values but also the
structure of the image this kind of problems are sol-
ved. In many cases, our results are as realistic as the
real images. Notice that challenging examples, such
as the fifth image from Figure 7, which image struc-
tures are not well defined, are not properly recovered
with our method nor with (Yeh et al., 2017). Some
failure examples are shown in Figure 9.
Regarding the results on SVHN dataset (Figure 8),
although they are not as realistic as the CelebA ones,
the missing content is well recovered even when dif-
ferent numbers may semantically fit the context. As
mentioned before, the lack of detail is probably cau-
sed by the training stage, due to the large variability
of the dataset (and the small number of examples).
Despite of this, let us notice that our qualitative re-
sults outperform the ones of (Yeh et al., 2017). This
may indicate that our algorithm is more robust in the
case of smaller datasets than (Yeh et al., 2017).
Quantitative Analysis and Evaluation Metrics.
The goal of semantic inpainting is to fill-in the mis-
sing information with realistic content. However,
with this purpose, there are many correct possibilities
to semantically fill the missing information. In ot-
her words, a reconstructed image equal to the ground
truth would be only one of the several potential solu-
tions. Thus, in order to quantify the quality of our
method in comparison with other methods, we use
different evaluation metrics: First, metrics based on a
distance with respect to the ground truth and, second,
a perceptual quality measure that is acknowledged to
agree with similarity perception in the human visual
system.
In the first case, considering the real images from
the database as the ground truth reference, the most
used evaluation metrics are the Peak Signal-to-Noise
Ratio (PSNR) and the Mean Square Error (MSE).
Notice, that both MSE and PSNR, will choose as
best results the ones with pixel values closer to the
ground truth. In the second case, in order to evaluate
perceived quality, we use the Structural Similarity in-
dex (SSIM) (Wang et al., 2004) used to measure the
similarity between two images. It is considered to be
correlated with the quality perception of the human
visual system and is defined as:
SSIM(x, y) = l(x, y) · c(x, y) · s( f , g)
where
l(x, y) =
2µ
x
µ
y
+C
1
µ
2
x
+µ
2
g
+C
1
c(x, y) =
2σ
x
σ
y
+C
2
σ
2
x
+σ
2
g
+C
2
s(x, y) =
2σ
xy
+C
3
σ
x
σ
y
+C
3
(10)
The first term in (10) is the luminance comparison
function which measures the closeness of the two
images mean luminance (µ
x
and µ
y
). The second term
is the contrast comparison function which measures
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
256
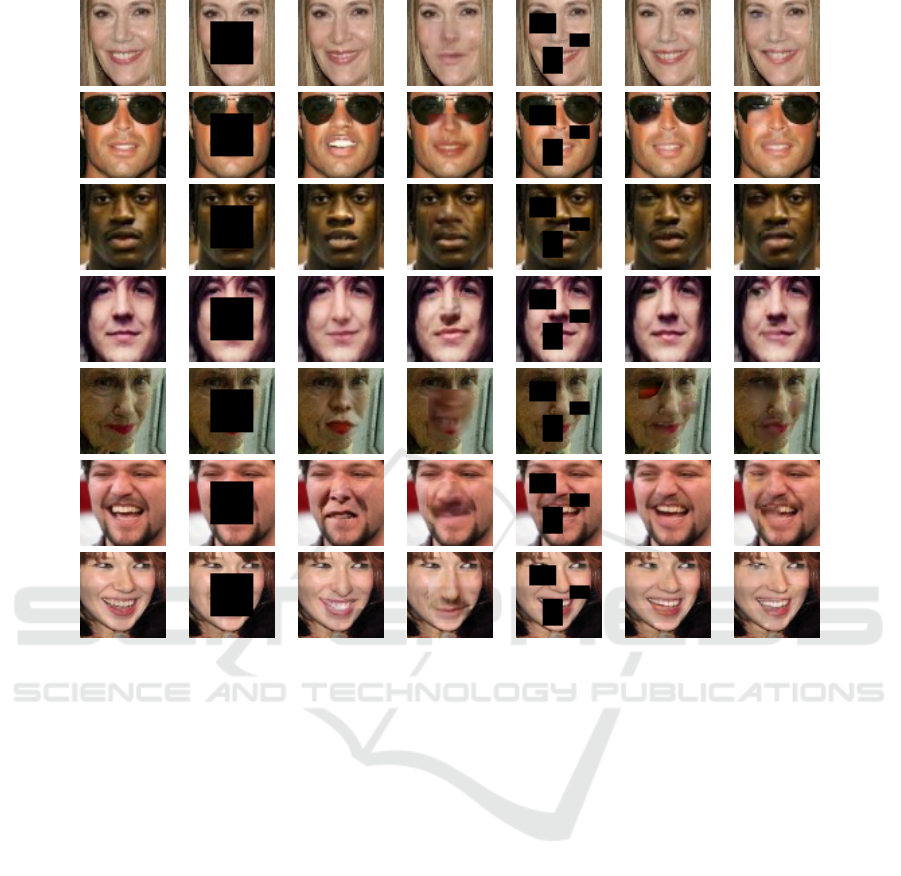
Original Masked Ours SIMDGM Masked Ours SIMDGM
Figure 7: Inpainting results on the CelebA dataset: Qualitative comparison with the method (Yeh et al., 2017) (fourth and
seventh columns, referenced as SIMDGM), using the two masks shown in the second and fifth columns, is also displayed.
the closeness of the contrast of the two images, where
σ
x
, σ
y
denote the standard deviations. The third term
is the structure comparison function which measures
the correlation between x and y. C
1
,C
2
and C
3
are
small positive constants avoiding dividing by zero.
Finally, σ
xy
denotes the covariance between x and y.
The SSIM is maximal when is equal to one.
Given these metrics we compare our results with
the one proposed by (Yeh et al., 2017) as it is the met-
hod more similar to ours. Tables 1 and 2 show the
numerical performance of our method and (Yeh et al.,
2017) using both the right and left inpainting masks
shown in Figure 5(c), respectively, named from now
on, central square and three squares mask, respecti-
vely. To perform an ablation study of all our contri-
butions and a complete comparison with (Yeh et al.,
2017), Tables 1 and 2 not only show the results obtai-
ned by their original algorithm and our proposed al-
gorithm, but also the results obtained by adding our
new gradient-based term L
g
(z|y, M) to their original
inpainting loss. We present the results varying the
trade-off effect between the different loss terms.
Our algorithm always performs better than the se-
mantic inpainting method by (Yeh et al., 2017). For
the case of the CelebA dataset, the average MSE
obtained by (Yeh et al., 2017) is equal to 872.8672
and 622.1092, respectively, compared to our results
that are equal to 785.2562 and 321.3023, respecti-
vely. It is highly reflected in the results obtained using
the SVHN dataset, where the original version of (Yeh
et al., 2017) obtains an MSE equal to 1535.8693 and
1531.4601, using the central and three squares mask
respectively, and our method 622.9391 and 154.5582.
On the one side, the proposed WGAN structure is able
to create a more realistic latent space and, on the ot-
her side, the proposed loss takes into account essential
information in order to recover the missing areas.
Regarding the accuracy results obtained with the
SSIM measure, we can see that ours results always
have a better perceived quality than the ones obtained
by (Yeh et al., 2017). In some cases, the values are
close to the double, for example, in the case of using
the dataset SVHN.
We can also conclude that our method is more sta-
Semantic Image Inpainting through Improved Wasserstein Generative Adversarial Networks
257
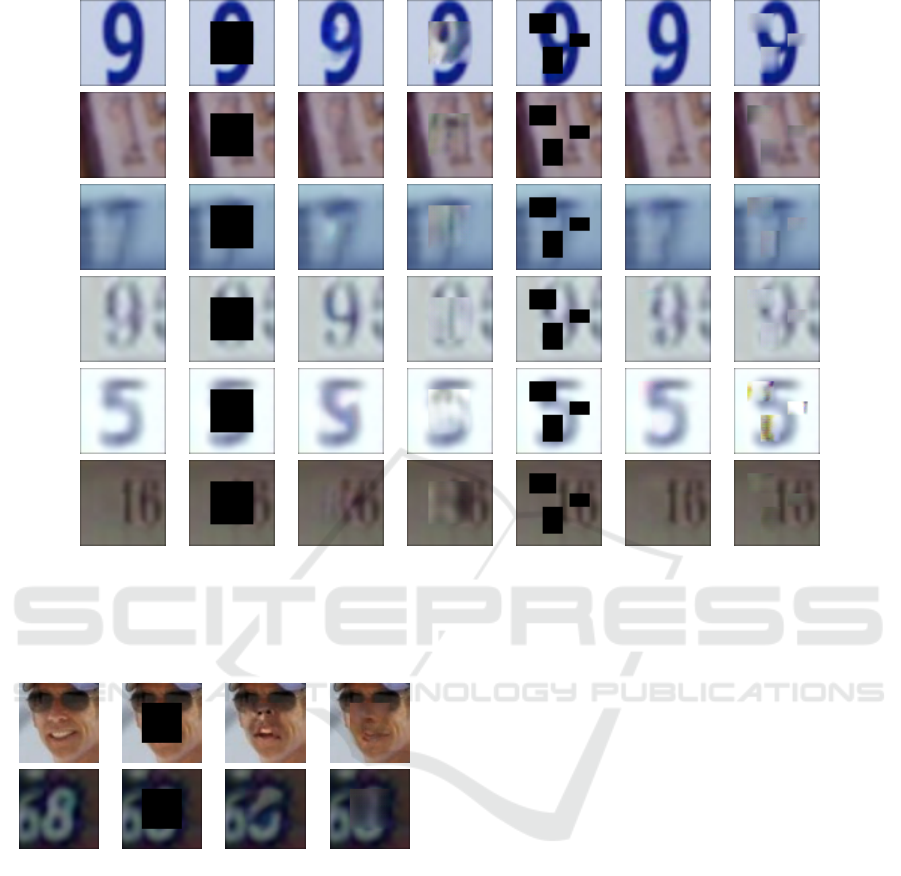
Original Masked Ours SIMDGM Masked Ours SIMDGM
Figure 8: Inpainting results on the SVHN dataset: Qualitative comparison with the method (Yeh et al., 2017) (fourth and
seventh columns, referenced as SIMDGM), using the two masks shown in the second and fifth columns, is also displayed.
Original Masked Ours SIMDGM
Figure 9: Some examples of failure cases.
ble in smaller datasets such in the case of SVHN. In
our case, decreasing the number of samples in the da-
taset does not mean to reduce the quality of the in-
painted images. Contrary with what is happening in
the case of (Yeh et al., 2017). Finally, in the cases
where we add the proposed loss to the algorithm pro-
posed by (Yeh et al., 2017), in most of the cases the
MSE, PSNR and SSIM improves. This fact clarifies
the big importance of the gradient loss in order to per-
form semantic inpainting.
5 CONCLUSIONS
In this work we propose a new method that takes ad-
vantage of generative adversarial networks to perform
semantic inpainting in order to recover large missing
areas of an image. This is possible thanks to, first, an
improved version of the Wasserstein Generative Ad-
versarial Network which is trained to learn the latent
data manifold. Our proposal includes a new genera-
tor and discriminator architectures having stabilizing
properties. Second, we propose a new optimization
loss in the context of semantic inpainting which is
able to properly infer the missing content by condi-
tioning to the available data on the image, through
both the pixel values and the image structure, while
taking into account the perceptual realism of the com-
plete image. Our qualitative and quantitative experi-
ments demostrate that the proposed method can infer
more meaningful content for incomplete images than
local, non-local and semantic inpainting methods. In
particular, our method qualitatively and quantitatively
outperforms the related semantic inpainting method
(Yeh et al., 2017) obtaining images with sharper ed-
ges, which looks like more natural and perceptually
similar to the ground truth.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
258
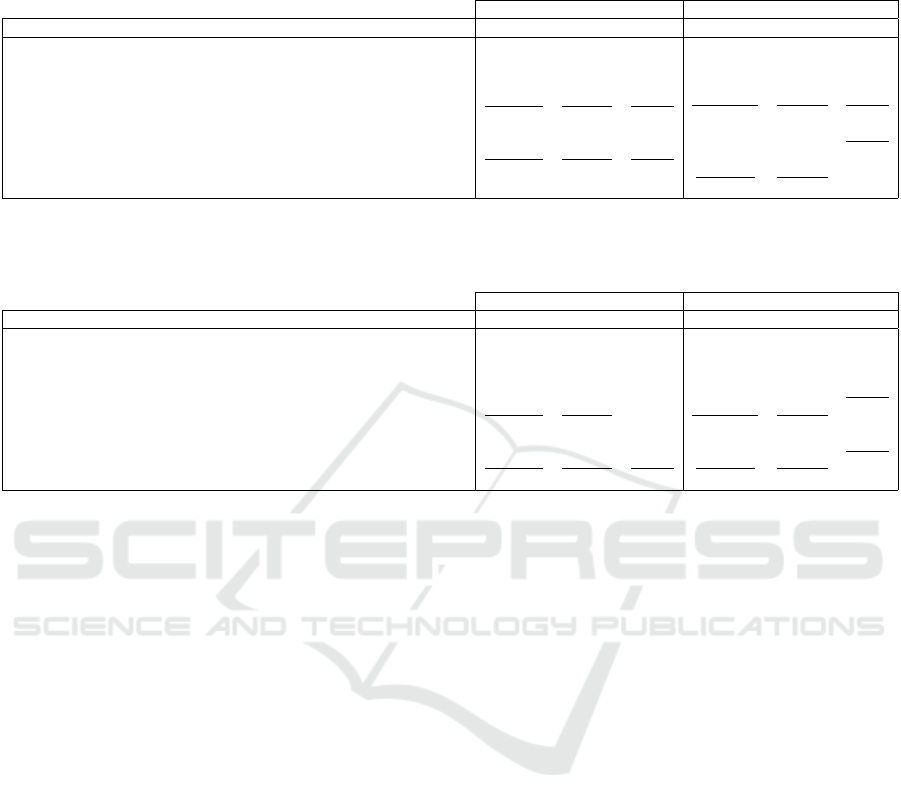
Table 1: Quantitative inpainting results for the central square mask (shown in Fig. 5(c)-left), including an ablation study of
our contributions in comparison with (Yeh et al., 2017). The best results for each dataset are marked in bold and the best
results for each method are underlined.
CelebA dataset SVHN dataset
Loss formulation MSE PSNR SSIM MSE PSNR SSIM
(Yeh et al., 2017) 872.8672 18.7213 0.9071 1535.8693 16.2673 0.4925
(Yeh et al., 2017) adding gradient loss with α = 0.1, β = 0.9 and η = 1.0 832.9295 18.9247 0.9087 1566.8592 16.1805 0.4775
(Yeh et al., 2017) adding gradient loss with α = 0.5, β = 0.5 and η = 1.0 862.9393 18.7710 0.9117 1635.2378 15.9950 0.4931
(Yeh et al., 2017) adding gradient loss with α = 0.1, β = 0.9 and η = 0.5 794.3374 19.1308 0.9130 1472.6770 16.4438 0.5041
(Yeh et al., 2017) adding gradient loss with α = 0.5, β = 0.5 and η = 0.5 876.9104 18.7013 0.9063 1587.2998 16.1242 0.4818
Our proposed loss with α = 0.1, β = 0.9 and η = 1.0 855.3476 18.8094 0.9158 631.0078 20.1305 0.8169
Our proposed loss with α = 0.5, β = 0.5 and η = 1.0 785.2562 19.1807 0.9196 743.8718 19.4158 0.8030
Our proposed loss with α = 0.1, β = 0.9 and η = 0.5 862.4890 18.7733 0.9135 622.9391 20.1863 0.8005
Our proposed loss with α = 0.5, β = 0.5 and η = 0.5 833.9951 18.9192 0.9146 703.8026 19.6563 0.8000
Table 2: Quantitative inpainting results for the three squares mask (shown in Fig. 5(c)-right), including an ablation study of
our contributions and a complete comparison with (Yeh et al., 2017). The best results for each dataset are marked in bold and
the best results for each method are underlined.
CelebA dataset SVHN dataset
Method MSE PSNR SSIM MSE PSNR SSIM
(Yeh et al., 2017) 622.1092 20.1921 0.9087 1531.4601 16.2797 0.4791
(Yeh et al., 2017) adding gradient loss with α = 0.1, β = 0.9 and η = 1.0 584.3051 20.4644 0.9067 1413.7107 16.6272 0.4875
(Yeh et al., 2017) adding gradient loss with α = 0.5, β = 0.5 and η = 1.0 600.9579 20.3424 0.9080 1427.5251 16.5850 0.4889
(Yeh et al., 2017) adding gradient loss with α = 0.1, β = 0.9 and η = 0.5 580.8126 20.4904 0.9115 1446.3560 16.5281 0.5120
(Yeh et al., 2017) adding gradient loss with α = 0.5, β = 0.5 and η = 0.5 563.4620 20.6222 0.9103 1329.8546 16.8928 0.4974
Our proposed loss with α = 0.1, β = 0.9 and η = 1.0 424.7942 21.8490 0.9281 168.9121 25.8542 0.8960
Our proposed loss with α = 0.5, β = 0.5 and η = 1.0 380.4035 22.3284 0.9314 221.7906 24.6714 0.9018
Our proposed loss with α = 0.1, β = 0.9 and η = 0.5 321.3023 23.0617 0.9341 154.5582 26.2399 0.8969
Our proposed loss with α = 0.5, β = 0.5 and η = 0.5 411.8664 21.9832 0.9292 171.7974 25.7806 0.8939
Unsupervised learning needs enough training data
to learn the distribution of the data and generate re-
alistic images to eventually succeed in semantic in-
painting. A huge dabaset with higher resolution ima-
ges would be needed to apply our method to more
complex and diverse world scenes. The presented re-
sults are based on low resolution images (64x64 pixel
size) and thus the inpainting method is limited to ima-
ges of that resolution. Also, more complex features
needed to represent such complex and diverse world
scenes would require a deeper architecture. Future
work will follow these guidelines.
ACKNOWLEDGEMENTS
The authors acknowledge partial support by MI-
NECO/FEDER UE project, reference TIN2015-
70410-C2-1 and by H2020-MSCA-RISE-2017 pro-
ject, reference 777826 NoMADS.
REFERENCES
Adler, J. and Lunz, S. (2018). Banach wasserstein gan.
arXiv:1806.06621.
Arias, P., Facciolo, G., Caselles, V., and Sapiro, G. A vari-
ational framework for exemplar-based image inpain-
ting. IJCV.
Arjovsky, M., Chintala, S., and Bottou, L. (2017). Wasser-
stein gan. arXiv:1701.07875.
Aujol, J.-F., Ladjal, S., and Masnou, S. (2010).
Exemplar-based inpainting from a variational point
of view. SIAM Journal on Mathematical Analysis,
42(3):1246–1285.
Ba, J. L., Kiros, J. R., and Hinton, G. E. (2016). Layer
normalization. arXiv:1607.06450.
Ballester, C., Bertalm
´
ıo, M., Caselles, V., Sapiro, G., and
Verdera, J. (2001). Filling-in by joint interpolation
of vector fields and gray levels. IEEE Trans. on IP,
10(8):1200–1211.
Burlin, C., Le Calonnec, Y., and Duperier, L. (2017). Deep
image inpainting.
Cao, F., Gousseau, Y., Masnou, S., and P
´
erez, P. (2011). Ge-
ometrically guided exemplar-based inpainting. SIAM
Journal on Imaging Sciences, 4(4):1143–1179.
Cao, Y. e. a. (2017). Unsupervised diverse colorization via
generative adversarial networks. In Machine Learning
and Knowledge Discovery in Databases. Springer.
Chan, C., Ginosar, S., Zhou, T., and Efros, A. A. (2018).
Everybody dance now. arXiv:1808.07371.
Chan, T. and Shen, J. H. (2001). Mathematical models for
local nontexture inpaintings. SIAM Journal of App-
lied Mathematics, 62(3):1019–1043.
Criminisi, A., P
´
erez, P., and Toyama, K. (2004). Region fil-
ling and object removal by exemplar-based inpainting.
IEEE Trans. on IP, 13(9):1200–1212.
Demanet, L., Song, B., and Chan, T. (2003). Image inpain-
ting by correspondence maps: a deterministic appro-
ach. App and Comp Mathematics, 1100:217–50.
Semantic Image Inpainting through Improved Wasserstein Generative Adversarial Networks
259

Demir, U. and
¨
Unal, G. B. (2018). Patch-based image in-
painting with generative adversarial networks. CoRR,
abs/1803.07422.
Efros, A. A. and Leung, T. K. (1999). Texture synthesis by
non-parametric sampling. In ICCV, page 1033.
Fedorov, V., Arias, P., Facciolo, G., and Ballester, C. (2016).
Affine invariant self-similarity for exemplar-based in-
painting. In Proceedings of the 11th Joint Conference
on Computer Vision, Imaging and Computer Graphics
Theory and Applications, pages 48–58.
Fedorov, V., Facciolo, G., and Arias, P. (2015). Variational
Framework for Non-Local Inpainting. Image Proces-
sing On Line, 5:362–386.
Getreuer, P. (2012). Total Variation Inpainting using Split
Bregman. Image Processing On Line, 2:147–157.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In Adv in
neural inf processing systems, pages 2672–2680.
Gulrajani, I., Ahmed, F., Arjovsky, M., Dumoulin, V., and
Courville, A. C. (2017). Improved training of wasser-
stein gans. In Adv in Neural Inf Processing Systems,
pages 5769–5779.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resi-
dual learning for image recognition. In CVPR.
Huang, J. B., Kang, S. B., Ahuja, N., and Kopf, J. (2014).
Image completion using planar structure guidance.
ACM SIGGRAPH 2014, 33(4):129:1–129:10.
Iizuka, S., Simo-Serra, E., and Ishikawa, H. (2017). Glo-
bally and locally consistent image completion. ACM
Trans. Graph., 36(4):107:1–107:14.
Kawai, N., Sato, T., and Yokoya, N. (2009). Image inpain-
ting considering brightness change and spatial locality
of textures and its evaluation. In Adv in Image and Vi-
deo Technology, pages 271–282.
Kingma, D. P. and Welling, M. (2013). Auto-encoding va-
riational bayes. arXiv:1312.6114.
Ledig, C., Theis, L., Husz
´
ar, F., Caballero, J., Cunning-
ham, A., Acosta, A., Aitken, A. P., Tejani, A., Totz,
J., Wang, Z., et al. (2017). Photo-realistic single
image super-resolution using a generative adversarial
network. In CVPR, volume 2, page 4.
Li, Y., Liu, S., Yang, J., and Yang, M.-H. (2017). Generative
face completion. In CVPR, volume 1, page 3.
Liu, M.-Y., Breuel, T., and Kautz, J. (2017). Unsupervi-
sed image-to-image translation networks. In Adv in
Neural Inf Processing Systems, pages 700–708.
Liu, Z., Luo, P., Wang, X., and Tang, X. (2015). Deep lear-
ning face attributes in the wild. In ICCV.
Mao, X., Li, Q., Xie, H., Lau, R. Y., Wang, Z., and Smol-
ley, S. P. (2017). Least squares generative adversarial
networks. In ICCV, pages 2813–2821.
Masnou, S. and Morel, J.-M. (1998). Level lines based
disocclusion. In Proc. of IEEE ICIP.
Netzer, Y., Wang, T., Coates, A., Bissacco, A., Wu, B., and
Ng, A. Y. Reading digits in natural images with unsu-
pervised feature learning. In NIPS workshop on deep
learning and unsupervised feature learning.
Nguyen, A., Yosinski, J., Bengio, Y., Dosovitskiy, A., and
Clune, J. (2016). Plug & play generative networks:
Conditional iterative generation of images in latent
space. arXiv:1612.00005.
Pathak, D., Krahenbuhl, P., Donahue, J., Darrell, T., and
Efros, A. A. (2016). Context encoders: Feature lear-
ning by inpainting. In CVPR.
P
´
erez, P., Gangnet, M., and Blake, A. Poisson image edi-
ting. In ACM SIGGRAPH 2003.
Pumarola, A., Agudo, A., Sanfeliu, A., and Moreno-
Noguer, F. (2018). Unsupervised Person Image Synt-
hesis in Arbitrary Poses. In CVPR.
Radford, A., Metz, L., and Chintala, S. (2015). Unsuper-
vised representation learning with deep convolutional
generative adversarial networks. arXiv:1511.06434.
Reed, S., Akata, Z., Yan, X., Logeswaran, L., Schiele, B.,
and Lee, H. (2016). Generative adversarial text to
image synthesis. In Proceedings of The 33rd Intern.
Conf. Machine Learning, pages 1060–1069.
Salimans, T., Goodfellow, I., Zaremba, W., Cheung, V.,
Radford, A., Chen, X., and Chen, X. Improved techni-
ques for training gans. In Adv in Neural Inf Processing
Systems 29.
van den Oord, A., Kalchbrenner, N., Espeholt, L., kavuk-
cuoglu, k., Vinyals, O., and Graves, A. Conditional
image generation with pixelcnn decoders. In Adv in
Neural Inf Processing Systems 29.
Wang, T.-C., Liu, M.-Y., Zhu, J.-Y., Tao, A., Kautz, J., and
Catanzaro, B. High-resolution image synthesis and se-
mantic manipulation with conditional gans. In CVPR.
Wang, Z. (2008). Image affine inpainting. In Image Analy-
sis and Recognition, volume 5112 of Lecture Notes in
Computer Science, pages 1061–1070.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli,
E. P. (2004). Image quality assessment: from error
visibility to structural similarity. IEEE Trans. on IP,
13(4):600–612.
Yang, C., Lu, X., Lin, Z., Shechtman, E., Wang, O., and
Li, H. (2017). High-resolution image inpainting using
multi-scale neural patch synthesis. In CVPR, vo-
lume 1, page 3.
Yeh, R. A., Chen, C., Lim, T.-Y., Schwing, A. G.,
Hasegawa-Johnson, M., and Do, M. N. (2017). Se-
mantic image inpainting with deep generative models.
In CVPR, volume 2, page 4.
Yu, J., Lin, Z., Yang, J., Shen, X., Lu, X., and Huang, T. S.
Generative image inpainting with contextual attention.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017a).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. arXiv preprint.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017b).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. In ICCV.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
260
