
Next Viewpoint Recommendation by Pose Ambiguity Minimization
for Accurate Object Pose Estimation
Nik Mohd Zarifie Hashim
1,5
, Yasutomo Kawanishi
1
, Daisuke Deguchi
2
, Ichiro Ide
1
, Hiroshi Murase
1
,
Ayako Amma
3
and Norimasa Kobori
4
1
Graduate School of Informatics, Nagoya University, Japan
2
Information Strategy Office, Nagoya University, Japan
3
Toyota Motor Corporation, Japan
4
Toyota Motor Europe, Belgium
5
Faculty of Electronic and Computer Engineering, Universiti Teknikal Malaysia Melaka, Malaysia
murase@i.nagoya-u.ac.jp, ayako amma@mail.toyota.co.jp, Norimasa.Kobori@toyota-europe.com
Keywords:
3D Object, Deep Learning, Next Viewpoint, Pose Ambiguity, Pose Estimation.
Abstract:
3D object pose estimation by using a depth sensor is one of the important tasks in activities by robots. To
reduce the pose ambiguity of an estimated object pose, several methods for multiple viewpoint pose estimation
have been proposed. However, these methods need to select the viewpoints carefully to obtain better results. If
the pose of the target object is ambiguous from the current observation, we could not decide where we should
move the sensor to set as the next viewpoint. In this paper, we propose a best next viewpoint recommendation
method by minimizing the pose ambiguity of the object by making use of the current pose estimation result as
a latent variable. We evaluated viewpoints recommended by the proposed method and confirmed that it helps
us to gain better pose estimation results than several comparative methods on a synthetic dataset.
1 INTRODUCTION
3D object pose estimation which estimates the three
axes rotation of a target object, has recently become
one of the focussed topics in the machine vision field
for application on tasks in activities by robots. Espe-
cially, object picking is an essential task for industrial
robots and home helper robots. For example, home
helper robots are required to pick an object and pass
it to a person.
As a machine vision problem, robots require a
sensor for observing their surrounding environment.
There are several types of sensors utilized to observe
the environment, e.g. light detection and ranging (Li-
DAR), stereo cameras, RGB and depth (RGB-D) ca-
meras, and so on. All these sensors are being actively
improved year by year. In this paper, since they are
robust to the object’s texture and can obtain much in-
formation about the object’s shape, we focus on depth
images captured by a depth sensor, and use them for
estimating the object’s pose.
Among techniques for pose estimation from depth
images, the simplest approach is estimating an ob-
ject’s pose from a single depth image captured from a
certain viewpoint. In this approach, the object’s pose
is described as a relative pose to the sensor.
If an object has a distinct shape to be distinguis-
hed from various viewpoints, object pose estimation
would be easy. However, most objects have view-
points where their poses cannot be uniquely distin-
guished by their appearances because they resemble
each other. We call this the “pose ambiguity pro-
blem”. In single viewpoint pose estimation, this pro-
blem leads to inaccurate pose estimation.
Since a robot can move and thus change view-
points, after the initial observation, it can move to
another viewpoint and re-observe the object. By ob-
serving an object from multiple viewpoints, the am-
biguity could be reduced. In this approach, to esti-
mate the object’s pose accurately, it is necessary to
choose the best next viewpoint. A better viewpoint
helps us to achieve a more accurate object pose esti-
mation as shown in Figure 1. However, if the pose
estimation result from the initial viewpoint is ambi-
guous, the robot could not properly decide in which
direction and how far it should move to reach the best
60
Hashim, N., Kawanishi, Y., Deguchi, D., Ide, I., Murase, H., Amma, A. and Kobori, N.
Next Viewpoint Recommendation by Pose Ambiguity Minimization for Accurate Object Pose Estimation.
DOI: 10.5220/0007366700600067
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 60-67
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
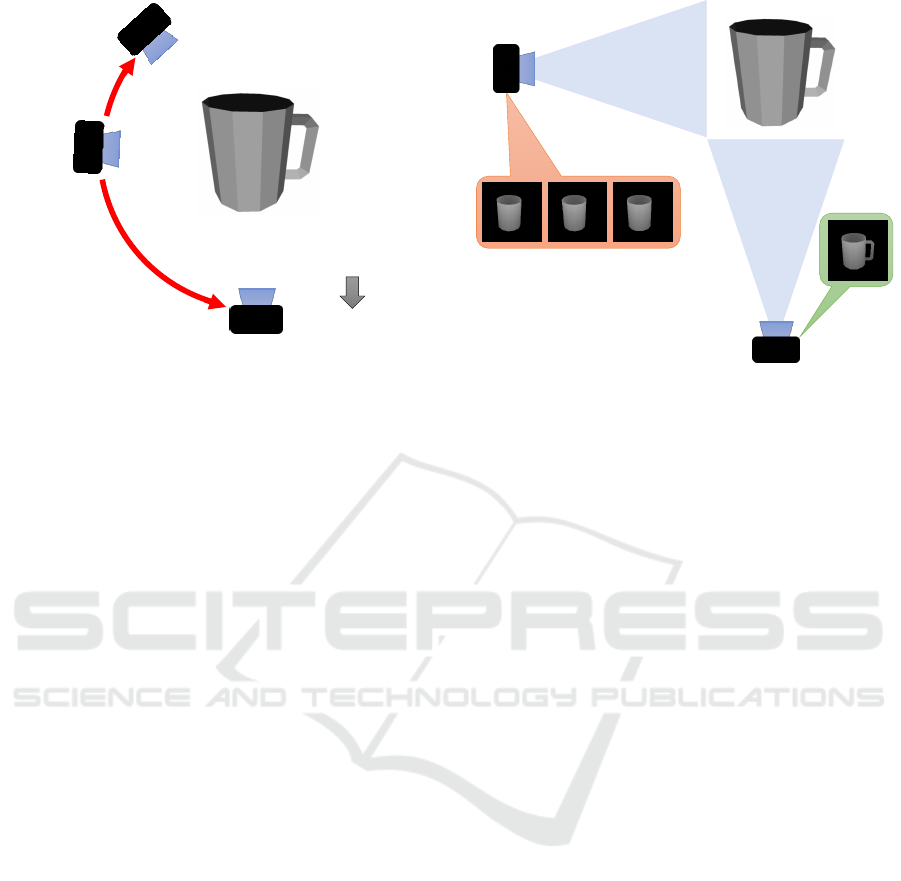
The best
next viewpoint
Low ambiguity
Initial
viewpoint
move
move
?
?
Figure 1: Recommendation of the best next viewpoint.
next viewpoint. The question here is that, how can we
know the best next viewpoint from the current obser-
vation as illustrated in Figure 2.
Research on pose estimation from multiple vie-
wpoints is actively proposed by the instance-level
approach (Doumanoglou et al., 2016) (Sock et al.,
2017). Though this approach seems to work, if an
application needs to estimate a pose between various
object shapes in a same category, they may not per-
form well. Thus, we focus on the category-level pose
estimation.
In this paper, we propose a method for the next
viewpoint recommendation for accurate object pose
estimation even if there are various shapes in the same
category. To evaluate the effectiveness of the recom-
mended viewpoint, we define a metric called “pose
ambiguity”, which reflects how ambiguous the pose
estimation is. By minimizing the pose ambiguity, we
will find the next viewpoint which will be the best
to estimate the object’s pose. This pose estimation
is realized by averaging the pose estimation of two
viewpoints which are the initial observation and the
next viewpoint. To handle the pose estimation am-
biguity of the initial observation, we make use of the
estimated pose from the initial observation as a latent
variable. We introduce an estimation method of the
pose ambiguity by marginalizing the latent variable,
which can consider all possibilities of the initial esti-
mation result. To make the problem simple and focus
on the key idea, in this paper, we limit the movement
of the sensor only to the z-axis rotation and consi-
der the non-cascade case for analyzing the next view-
point. However, the proposed method and discussion
could be straightforwardly extended to 3D rotation.
We evaluate the effectiveness of the proposed method
on a dataset generated from a publicly available 3D
object dataset: ShapeNet (Chang et al., 2015).
?
80
°
90
°
100
°
High ambiguity
0
°
Low
ambiguity
Figure 2: Selection problem in pose estimation from multi-
ple viewpoints.
Our contribution can be summarized as follows:
• We define a metric “pose ambiguity” to evaluate
the ambiguousness of the pose estimation.
• We propose a next viewpoint recommendation
method which finds the best next viewpoint where
the pose ambiguity is minimized.
• We show that the proposed method ourperforms
two other naive viewpoint recommendation met-
hods, and also that it achieves a better result than
the pose estimation result from a single viewpoint.
• We introduce a new paradigm of searching the
best next viewpoint for category-level object pose
estimation compared to conventional instance-
level object pose estimation.
The remaining of this paper is structured as fol-
lows: In Section 2, related works that have been pre-
viously proposed will be introduced. After that, we
will explain the proposed method in detail. Section 4
will discuss the evaluation results. Finally, we con-
clude our paper in Section 5.
2 RELATED WORK
In the past few years, many researchers proposed met-
hods to tackle various difficulties in 3D object pose
estimation. Here, we categorize the pose estimation
methods into the following two approaches: those
from a single viewpoint and those from multiple vie-
wpoints.
Next Viewpoint Recommendation by Pose Ambiguity Minimization for Accurate Object Pose Estimation
61

2.1 Object Pose Estimation from a
Single Viewpoint
The template matching approach is one of the ear-
liest pose estimate method from a single viewpoint
(Chin and Dyer, 1986). This method utilizes many
templates of the target object captured from various
viewpoints beforehand, and the pose estimation result
is taken from the best matched template. To reduce
the number of templates, Murase and Nayer (Mu-
rase and Nayar, 1995) proposed the Parametric Ei-
genspace method. This method represents an object’s
pose variation on a manifold in a low-dimensional
subspace obtained by Principal Component Analysis
(PCA). By interpolating the pose (template) of the
target object on the manifold, we can achieve accu-
rate object pose estimation even with few templates.
Since PCA focuses on the appearance variation of
templates, some poses with similar appearances may
be mapped to similar points in the low-dimensional
subspace, which is difficult to distinguish. This dimi-
nishes the accuracy of the pose estimation. Moreover,
the method is based on PCA, which is an unsupervi-
sed learning method, so it does not fully utilize the
pose information for estimating the object’s poses.
Recently, Ninomiya et al. (Ninomiya et al., 2017)
proposed a supervised feature extraction method for
embedding templates into a pose manifold. They
focused on Deep Convolutional Neural Networks
(DCNNs) (Krizhevsky et al., 2012) which is one
of the deep-learning models, as a supervised lear-
ning method for manifold embedding. They modi-
fied DCNNs for object pose estimation, named Pose-
CyclicR-Net, which can correctly handle object rota-
tion by describing the rotation angle using trigonome-
tric functions. By introducing the Pose-CyclicR-Net
based manifold embedding, which is called Deep Ma-
nifold Embedding, the method estimates the object’s
pose from a single viewpoint.
In general, object pose estimation from a single
viewpoint faces the problem of inaccurate pose esti-
mation due to the ambiguity issue, namely, an object
may have some poses which look similar and hard to
be distinguished.
2.2 Object Pose Estimation from
Multiple Viewpoints
To avoid the pose ambiguity issue, several methods
focus on object pose estimation from multiple vie-
wpoints. Collet and Srinivasa (Collet and Srini-
vasa, 2010) proposed a multi-view object pose es-
timation method based on multi-step optimization
and global refinement. Erkent et al. (Erkent et al.,
2016) tackle object pose estimation in cluttered sce-
nes. This is a multi-view approach based on proba-
bilistic, appearance-based pose estimation. Vikst
´
en
et al. (Vikst
´
en et al., 2006) proposed a method com-
bining several pose estimation algorithms and infor-
mation from several viewpoints. Zeng et al. (Zeng
et al., 2017b) proposed a self-supervised approach
for object pose estimation in the Amazon Picking
Challenge (Zeng et al., 2017a) scenario. Kanezaki et
al. (Kanezaki et al., 2018) proposed the RotationNet,
which takes multi-view images of an object as input
and jointly estimates its pose and object category. As
such, there are various methods for object pose esti-
mation from multiple viewpoints, but these methods
do not consider which viewpoint is effective for the
estimation. Unlike others, in this paper we propose
an idea of estimating the current viewpoint which will
increase the pose estimation later.
Recently, some researches focus on predicting
Next-Best-View for object pose estimation. Douma-
noglou et al. (Doumanoglou et al., 2016) and Sock et
al. (Sock et al., 2017) proposed next-best-view pre-
diction methods for multiple object pose estimation
based on Hough Forest (Gall and Lempitsky, 2009).
We expect that this approach will be the next inte-
resting topic. This idea will allow us to support an
application in which various instances in a specific
object category need to be considered as the target
object. However, we acknowledge that these methods
could not be applied for the category-level object pose
estimation since they are designed only for instance-
level object pose estimation. As the pose estimation
on category-level has not been studied in the past, we
initiated the study with our proposed method.
3 NEXT VIEWPOINT
RECOMMENDATION
3.1 Overview
In this paper, we propose a novel next viewpoint
recommendation method based on pose ambiguity
minimization; We define a metric called “pose am-
biguity” given two different viewpoints which should
be minimized. Since the initial viewpoint may be am-
biguous, by handling the current viewpoint as a la-
tent variable, the pose ambiguity function is decom-
posed into “pose ambiguity under given two view-
points” and “viewpoint ambiguity under a given ob-
servation”. Figure 3 illustrates the angle distribution
for the “pose ambiguity” G. Here, the minimum value
of G at y-axis infers the best next viewpoint as δ [
◦
]
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
62
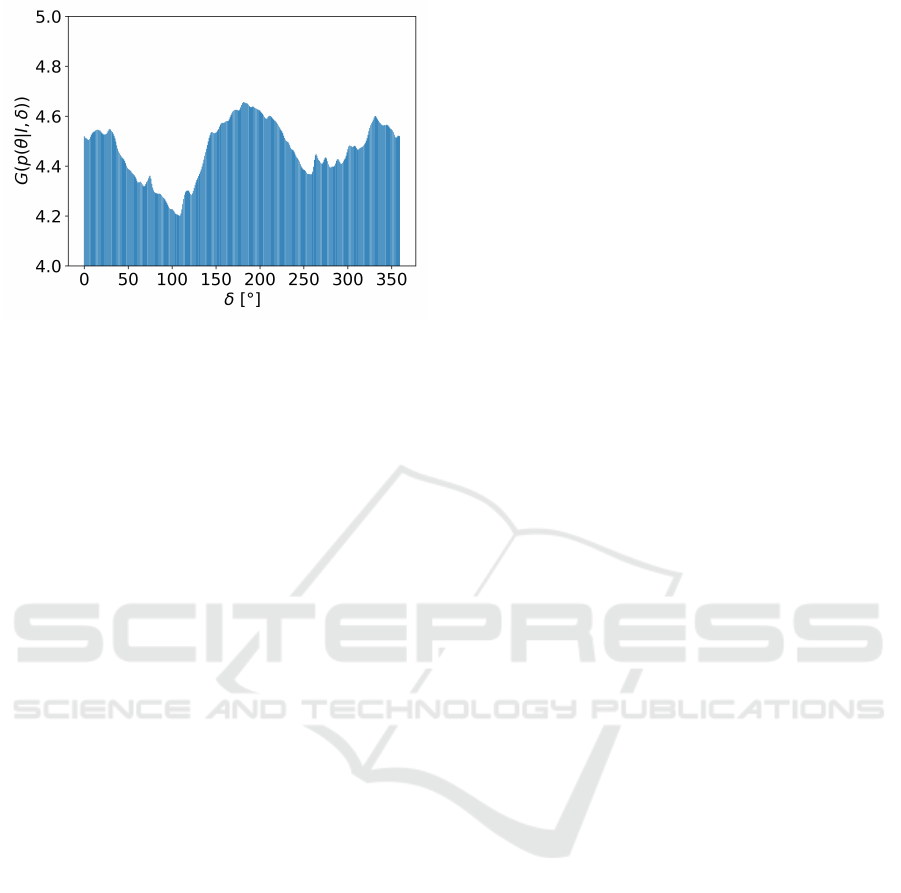
Figure 3: Pose ambiguity minimization (Input image with
90
◦
rotation angle).
from x-axis. This δ will be utilized to estimate all the
object poses. We calculate the pose estimation for two
viewpoints by averaging them as it provides us a re-
liable pose between the two different angles. We will
introduce the details of the process in the following
sections.
3.2 Pose Ambiguity Minimization
Framework
This framework will measure the pose ambiguity in a
quantitative way. First of all, what is pose ambiguity?
Here, we define it as the difficulty to estimate the pose
of an object from a viewpoint. Given a pose likeli-
hood distribution over the possible poses, if the dis-
tribution is largely diverse, the pose will be difficult
to be estimated correctly. Thus, we define the pose
ambiguity G as a function of the pose likelihood dis-
tribution p(θ ). For example, G can be defined by the
Entropy of p(θ ) as
G(p) =
Z
−p(θ)log p(θ)dθ . (1)
Here, we evaluate the pose likelihood distribution
under an image observed from the initial viewpoint,
and then yield the rotation angle to the best next vie-
wpoint. Therefore, we define the pose likelihood dis-
tribution as a conditional distribution p(θ|I, δ ) when
an image I from the current viewpoint and a rotation
angle δ are given.
The minimum value of the pose ambiguity in G
will tell us the best next viewpoint for accurate pose
estimation using the two viewpoints. By using the
formulation, we find the best viewpoint by minimi-
zing the entropy as
ˆ
δ = argmin
δ
G(p(θ|I, δ )). (2)
To handle the ambiguity of the initial viewpoint,
we further decompose the pose likelihood distribution
as follows:
p(θ|I, δ ) =
Z
p(θ|φ, δ)p(φ|I)dφ. (3)
The first term p(θ |φ , δ ) indicates the pose likelihood
distribution under two given viewpoints φ and φ + δ ,
and the rest part p(φ |I) indicates the viewpoint like-
lihood under a given observation. In the following
sections, we explain more details on the two distribu-
tions.
3.3 Estimation of Viewpoint Likelihood
Distribution p(φ|I)
Since the absolute viewpoint of an observation is dif-
ficult to obtain, the viewpoint likelihood distribution
can be considered as a relative pose estimation from
the initial viewpoint. In the ideal case, if we have a
discrete pose classifier in hand for the pose estima-
tion, we may obtain not only the estimation result
(pose) but also the likelihood for all possible poses.
On the other hand, if we take a regression-based ap-
proach for the pose estimation, such as Pose-CyclicR-
Net proposed by Ninomiya et al. (Ninomiya et al.,
2017), we may only obtain an estimation result such
as
φ = f (I), (4)
where I represents a given image and f the pose es-
timator. For such a regression-based pose estimator,
how can we obtain the viewpoint likelihood distribu-
tion? Since we have many images I
i
of various objects
in a class, by applying pose estimation for many ima-
ges, we can obtain many pose estimation results φ
i
.
From these pose estimation results and their ground
truth, we can obtain a huge number of pairs of an esti-
mation result and a ground truth. By applying density
estimation to the data, we can obtain a conditional dis-
tribution as p(φ | f (i)) = p(φ
gt
|φ
est
), where φ
gt
repre-
sents the ground truth and φ
est
the estimation result.
By using the conditional distribution, we can
obtain the viewpoint likelihood distribution as,
p(φ|I) = p(φ | f (I)) (5)
for a regression-based object pose estimator. This vie-
wpoint likelihood distribution is illustrated in Figure
4.
Next Viewpoint Recommendation by Pose Ambiguity Minimization for Accurate Object Pose Estimation
63
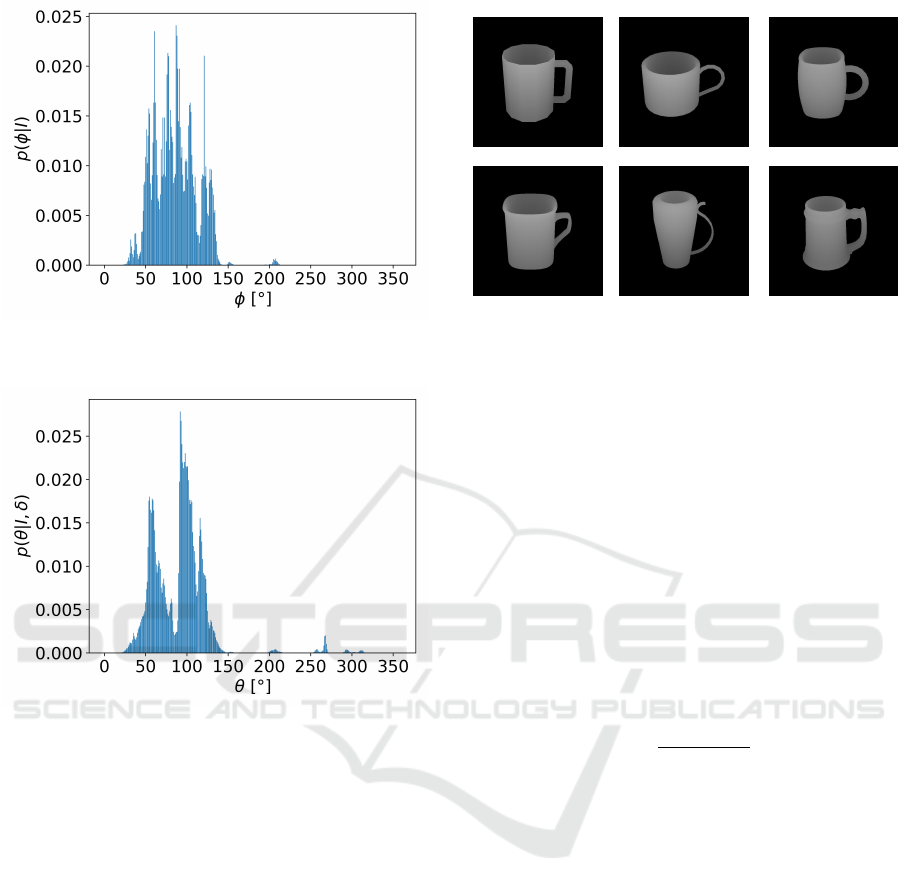
Figure 4: Viewpoint likelihood distribution p(φ|I) (Input
image with 90
◦
rotation angle).
Figure 5: Pose likelihood distribution given two viewpoints
p(θ|I, δ) (Input image with 90
◦
rotation angle).
3.4 Estimation of Pose Likelihood
Distribution p(θ|φ, δ)
Here we explain the pose likelihood distribution given
two viewpoints φ and φ + δ , where φ represents the
current viewpoint and δ the rotation angle to the next
viewpoint. The likelihood represents how accurately
the objects’ pose can be estimated given the two vie-
wpoints. The pose likelihood distribution given two
viewpoints is illustrated in Figure 5. Here, we simply
decompose the likelihood distribution into two pose
likelihoods as
p(θ|φ, δ) = p(θ |φ )p(θ |φ + δ ), (6)
where p(θ |φ) and p(θ |φ + δ) denote the pose like-
lihood distributions given a viewpoint φ and φ + δ ,
respectively. This equation holds by assuming p(θ),
which is the pose likelihood without any information,
follows a uniform distribution. Each likelihood dis-
Figure 6: Example images from the “Mug” class in the
ShapeNet dataset (Chang et al., 2015).
tribution given a viewpoint can also be calculated by
applying density estimation for the pairs of a pose es-
timation result and the ground truth similarly as to the
method described in Section 3.3.
3.5 Pose Estimation θ
e
Finally we can estimate the object’s pose from two
viewpoints: the initial viewpoint and the next view-
point. Here, I
1
is the image observed from the initial
viewpoint. After rotating δ [
◦
], we obtain I
2
, which is
the image observed from the next viewpoint.
We estimate the pose for these two viewpoints θ
e
as the average of pose estimation results from I
1
and
I
2
(by considering the rotation angle δ ) as
θ
e
=
φ
1
+ φ
2
− δ
2
, (7)
where φ
1
= f (I
1
) is the pose estimation from the ini-
tial viewpoint and φ
2
= f (I
2
) that from the next vie-
wpoint.
4 EXPERIMENTS
4.1 Dataset
To show the effectiveness of the proposed viewpoint
recommendation method, we performed a simulation-
based evaluation. For the simulation, we used a set of
3D models in the ShapeNet (Chang et al., 2015). We
collected 135 models in the “Mug” class. Concretely,
we put a 3D model in a virtual environment and ob-
served it using a virtual depth sensor. By rotating the
sensor around the z-axis of the 3D model, we obtai-
ned 360 depth images in the range of [0
◦
, 360
◦
) for
each model as shown in Figure 6.
Additionally, in the simulation, we changed the
elevation angle of the virtual sensor as 0
◦
, 15
◦
, 30
◦
,
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
64

0
°
15
°
30
°
45
°
60
°
75
°
Figure 7: Example of images observed from different ele-
vation angles.
45
◦
, 60
◦
, and 75
◦
which is elevated upright from the
z-plane as shown in Figure 7. In total, 135 objects
were observed from each elevating angle with a total
of 48,600 images. We used the rendered images for
training and testing in the evaluation. These images
are divided into two folds: a training set and a testing
set. Images of 100 objects are randomly selected for
the training set and the rest are used for the testing set.
We conducted an experiment with the synthetic mug
dataset, which we consider is adequate to address the
ambiguity issue for category-level pose estimation.
4.2 Evaluation Method
4.2.1 Pose Estimation Method
We prepared a network architecture similar to the
Pose-CyclicR-Net proposed by Ninomiya et al. (Ni-
nomiya et al., 2017) as the pose estimator. The origi-
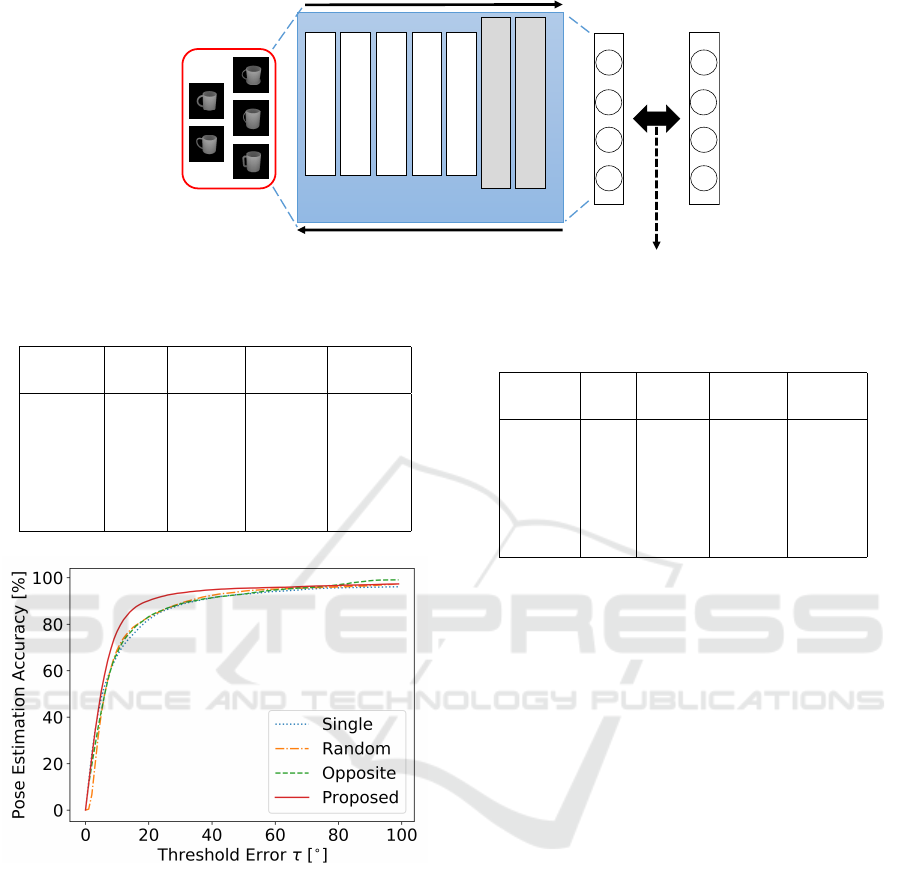
nal network architecture is shown in Figure 8. Since
we assumed that the object pose variation is limited
to a single axis rotation, we modified the network out-
put to a pair of trigonometric functions (cos θ , sin θ)
instead of the original quaternion. We trained the pose
estimator using the training images.
4.2.2 Evaluation Criteria
We evaluated how the recommended viewpoints are
appropriate for the pose estimation by using several
criteria. One criterion is the Mean Absolute Error
(MAE) of the pose estimation results with the ground
truth. The pose estimation results are obtained by
using a pair of the initial viewpoint and the recom-
mended viewpoint. By considering the circularity of
angles, the error can be calculated as
MAE =
1
N
N
∑
i=1
d(θ
i
e
, θ
i
g
), (8)
where N represents the number of images, θ
i
e
and θ
i
g
are the pose estimation result and the ground truth,
respectively. d(θ
i
e
, θ
g
)
i
is the absolute difference of
the poses considering the circularity defined as
d(θ
e
, θ
g
) =
|θ
e
− θ
g
| if |θ
e
− θ
g
| > 180
◦
,
180
◦
− |θ
e
− θ
g
| otherwise.
(9)
The other criterion is Pose Estimation Accuracy
(PEA). This criterion is be defined as
PEA(τ) =
1
N
N
∑
i=1
F(d(θ
i
e
, θ
i
g
) < τ), (10)
where τ represents a threshold error which reflects
the difference of pose estimation result θ
i
e
and ground
truth θ
i
g
, F(·) is a function which returns 1 if the con-
dition in the function holds and 0 vice versa.
4.2.3 Comparative Methods
We compared the pose estimation results by the pro-
posed method and several other baseline methods. To
the best of our knowledge, there is no existing met-
hod that could be directly compared with our propo-
sed method as the category-level next best viewpoint
estimation study is just initiated by us. Thus as a base-
line, we used pose estimation from a single viewpoint,
which just applies Pose-CyclicR-Net-like Network to
the input image. We also compared with several vie-
wpoint recommendation methods.
We adapted two other baseline methods from
(Sock et al., 2017) which are “Random” and “Furt-
hest”. The first baseline viewpoint recommendation
method is recommending the next viewpoint rand-
omly, named “Random”. Because of the random-
ness, we selected ten viewpoints randomly and avera-
ged the estimation results. The second baseline view-
point recommendation method is recommending the
next viewpoint by simply selecting the opposite side
or the furthest point from the initial viewpoint, named
“Opposite” (equivalent to “Furthest”).
4.3 Results
4.3.1 Mean Absolute Error (MAE)
The experimental results are summarized in Table 1.
Here, for all elevation angles, the proposed method
Next Viewpoint Recommendation by Pose Ambiguity Minimization for Accurate Object Pose Estimation
65
Convolution
Convolution
Convolution
Convolution
Convolution
Fully
-Connected
𝒙in
𝑡
𝐸
Fully
-Connected
𝑥
1
𝑥
2
𝑥
3
𝑥
4
𝑞
1
𝑞
2
𝑞
3
𝑞
4
𝑓
1
𝑓
2
𝑓
3
𝑓
4
𝑓
5
𝑓
6
𝑓
7
𝒙out
Figure 8: Original Pose-CyclicR-Net (Ninomiya et al., 2017).
Table 1: Comparison of overall Pose Estimation Accuracy.
Elevation Single Random Opposite Proposed
angle
0
◦
18.36
◦
16.34
◦
14.91
◦
14.18
◦
15
◦
15.55
◦
14.01
◦
13.35
◦
11.58
◦
30
◦
15.40
◦
13.87
◦
12.75
◦
11.96
◦
45
◦
10.71
◦
9.32
◦
8.81
◦
8.28
◦
60
◦
8.15
◦
7.27
◦
7.15
◦
6.31
◦
75
◦
7.36
◦
6.57
◦
6.36
◦
5.15
◦
Figure 9: Pose Estimation Accuracy within threshold error
0
◦
– 100
◦
(elevation angle = 15
◦
).
outperformed all other comparative methods. This re-
sult clearly shows that the proposed method is promi-
sing and gave a better way (next viewpoint) for object
pose estimation. We successfully managed to reduce
the pose ambiguity in the difficult observation view-
point which has been mentioned earlier in Figure 1
at the beginning of this paper. We can see that esti-
mating object’s pose from two viewpoints yields bet-
ter results than from a single viewpoint. By compa-
ring with the other pose recommendation methods,
the proposed method achieved better results by care-
fully selecting the best viewpoint for object pose esti-
mation. By reducing the pose ambiguity, the proposed
method achieved the lowest pose estimation error.
Table 2: Comparison using Partial-AUC (pAUC) between τ
from 0
◦
to 60
◦
.
Elevation Single Random Opposite Proposed
angle
0
◦
75.61 76.75 78.19 80.80
15
◦
79.13 79.14 79.16 84.05
30
◦
79.79 79.69 80.23 83.75
45
◦
84.94 85.46 86.07 87.65
60
◦
88.31 88.42 88.57 90.49
75
◦
89.47 89.42 89.91 92.03
4.3.2 Pose Estimation Accuracy (PEA)
In Figure 9, we plotted the pose estimation accuracy
by changing the threshold error τ in Equation 10 in
the case of elevation angle = 15
◦
. We confirmed
that the proposed method outperforms all the com-
parison methods when the threshold error is within
0
◦
< τ < 60
◦
. When 60
◦
< τ < 100
◦
, the “Opposite”
method outperformed the proposed method. Howe-
ver, a large threshold error value will not critically in-
fluence the pose estimation accuracy, so we consider
the results when τ > 60
◦
are not significant for this
purpose. We also calculated partial-AUCs (pAUCs)
for all curves as summarized in Table 2. With all six
elevation angles, we showed that the proposed met-
hod achieves the most accurate pose estimation com-
pared to the other methods.
5 CONCLUSION
We proposed a new idea to estimate the best next vie-
wpoint for an accurate pose estimation and a new fra-
mework for minimizing the pose ambiguity. We sho-
wed that the proposed method outperforms three ba-
seline methods by utilizing the latent variable which
provides us with a new next viewpoint in the category-
level pose estimation. Therefore, by having this next
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
66

viewpoint, a reliable and high pose estimation accu-
racy is achievable.
For future improvement, we are looking for-
ward to evaluating the proposed method with multi-
dimension elevation angles as to compare with our
current single elevation angle implementation in this
paper. The improvement for obtaining a higher
pose estimation accuracy by expanding the two vie-
wpoints into several points has also been projected
as our upcoming task. To overcome the non-cascade
next viewpoint in specific cases, we also consider to
have “several” best next viewpoint where the multi-
dimensional elevation angles are utilized. This appro-
ach may be utilized with a different class of multiple
objects for having a wider scope of application and
could help the development of the human helper ro-
bot field.
ACKNOWLEDGEMENT
The authors would like to thank Toyota Motor Corpo-
ration, Ministry of Education of Government of Ma-
laysia (MOE), and Universiti Teknikal Malaysia Me-
laka (UTeM). Parts of this research were supported by
MEXT, Grant-in-Aid for Scientific Research.
REFERENCES
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P.,
Huang, Q., Li, Z., Savarese, S., Savva, M., Song,
S., Su, H., Xiao, J., Yi, L., and Yu, F. (2015).
ShapeNet: An information-rich 3D model repository.
arXiv:1512.03012.
Chin, R. T. and Dyer, C. R. (1986). Model-based re-
cognition in robot vision. ACM Computing Surveys,
18(1):67–108.
Collet, A. and Srinivasa, S. S. (2010). Efficient multi-view
object recognition and full pose estimation. In Pro-
ceedings of the 2010 IEEE International Conference
on Robotics and Automation, pages 2050–2055.
Doumanoglou, A., Kouskouridas, R., Malassiotis, S., and
Kim, T.-K. (2016). Recovering 6D object pose and
predicting next-best-view in the crowd. In Procee-
dings of the 2016 IEEE International Conference
on Computer Vision and Pattern Recognition, pages
3583–3592.
Erkent,
¨
O., Shukla, D., and Piater, J. (2016). Integration
of probabilistic pose estimates from multiple views.
In Proceedings of the 2016 European Conference on
Computer Vision, volume 7, pages 154–170.
Gall, J. and Lempitsky, V. (2009). Class-specific Hough fo-
rests for object detection. In Proceedings of the 2009
IEEE International Conference on Computer Vision
and Pattern Recognition, pages 1022–1029.
Kanezaki, A., Matsushita, Y., and Nishida, Y. (2018). Rota-
tionNet: Joint object categorization and pose estima-
tion using multiviews from unsupervised viewpoints.
In Proceedings of the 2018 IEEE International Con-
ference on Computer Vision and Pattern Recognition,
pages 5010–5019.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Proceedings of the 25th Internatio-
nal Conference on Neural Information Processing Sy-
stems, pages 1097–1105.
Murase, H. and Nayar, S. K. (1995). Visual learning and
recognition of 3-D objects from appearance. Interna-
tional Journal of Computer Vision, 14(1):5–24.
Ninomiya, H., Kawanishi, Y., Deguchi, D., Ide, I., Murase,
H., Kobori, N., and Nakano, Y. (2017). Deep ma-
nifold embedding for 3D object pose estimation. In
Proceedings of the 12th Joint Conference on Compu-
ter Vision, Imaging and Computer Graphics Theory
and Applications, pages 173–178.
Sock, J., Kasaei, S. H., Lopes, L. S., and Kim, T. K. (2017).
Multi-view 6D object pose estimation and camera mo-
tion planning using RGBD images. In Proceedings of
the 2017 IEEE International Conference on Computer
Vision Workshops, pages 2228–2235.
Vikst
´
en, F., S
¨
oderberg, R., Nordberg, K., and Perwass, C.
(2006). Increasing pose estimation performance using
multi-cue integration. In Proceedings of the 2006
IEEE International Conference on Robotics and Au-
tomation, pages 3760–3767.
Zeng, A., Song, S., Yu, K., Donlon, E., Hogan, F. R.,
Bauz
´
a, M., Ma, D., Taylor, O., Liu, M., Romo, E.,
Fazeli, N., Alet, F., Dafle, N. C., Holladay, R., Mo-
rona, I., Nair, P. Q., Green, D., Taylor, I., Liu, W.,
Funkhouser, T. A., and Rodriguez, A. (2017a). Ro-
botic pick-and-place of novel objects in clutter with
multi-affordance grasping and cross-domain image
matching. arXiv/1710.01330.
Zeng, A., Yu, K.-T., Song, S., Suo, D., Walker, E., Ro-
driguez, A., and Xiao, J. (2017b). Multi-view self-
supervised deep learning for 6D pose estimation in the
amazon picking challenge. In Proceedings of the 2017
IEEE International Conference on Robotics and Auto-
mation, pages 1386–1383.
Next Viewpoint Recommendation by Pose Ambiguity Minimization for Accurate Object Pose Estimation
67
