
Design of Real-time Semantic Segmentation Decoder
for Automated Driving
Arindam Das
1
, Saranya Kandan
1
, Senthil Yogamani
2
and Pavel K
ˇ
r
´
ı
ˇ
zek
3
1
Detection Vision Systems, Valeo India, India
2
Valeo Vision Systems, Valeo Ireland, Ireland
3
Valeo R&D DVS, Prague, Czech Republic
Keywords:
Semantic Segmentation, Visual Perception, Efficient Networks, Automated Driving.
Abstract:
Semantic segmentation remains a computationally intensive algorithm for embedded deployment even with
the rapid growth of computation power. Thus efficient network design is a critical aspect especially for ap-
plications like automated driving which requires real-time performance. Recently, there has been a lot of
research on designing efficient encoders that are mostly task agnostic. Unlike image classification and boun-
ding box object detection tasks, decoders are computationally expensive as well for semantic segmentation
task. In this work, we focus on efficient design of the segmentation decoder and assume that an efficient
encoder is already designed to provide shared features for a multi-task learning system. We design a novel
efficient non-bottleneck layer and a family of decoders which fit into a small run-time budget using VGG10
as efficient encoder. We demonstrate in our dataset that experimentation with various design choices led to an
improvement of 10% from a baseline performance.
1 INTRODUCTION
Semantic segmentation provides complete semantic
scene understanding wherein each pixel in an image
is assigned a class label. It has applications in va-
rious fields including automated driving, augmented
reality and medical image processing. The complex-
ity of Convolution Neural Networks (CNN) architec-
tures have been growing consistently. However for in-
dustrial applications, there is a computational bound
because of limited resources on embedded platforms.
It is essential to design efficient models which fit the
run-time budget of the system. There are many papers
which demonstrate large run-time improvements with
minimal loss of accuracy by using various techniques.
An overview of efficient CNN for semantic segmen-
tation is provided in (Briot et al., 2018).
Semantic segmentation architectures typically
have an encoder and a decoder as shown in Figure 1.
The encoder extracts features from the image which is
then decoded to produce semantic segmentation out-
put. ImageNet pre-trained networks are typically used
as encoder. In early architectures (Badrinarayanan
et al., 2015) (Ronneberger et al., 2015), decoder was a
mirror image of encoder and had the same complex-
ity. Newer architectures use a relatively smaller de-
coder. There can also be additional connections from
encoder to decoder. For example, SegNet (Badrina-
rayanan et al., 2015) passes max-pooling indices and
Unet (Ronneberger et al., 2015) passes intermediate
feature maps to decoder.
In this paper, we propose the design of a novel
non-bottleneck layer particularly to perform seman-
tic segmentation task where the encoder is task inde-
pendent unlike existing methods. Our non-bottleneck
layer based on residual learning, has been designed to
perform well for some classes that are not well repre-
sented in the dataset. Having cascaded skip connecti-
ons make our non-bottleneck layer capable to handle
high gradient flow and suitable for an embedded plat-
form to run on real time with lightweight encoder mo-
del. Table 1 presents the efficacy of the proposed de-
coder architecture over many variants of the decoder
model while maintaining the encoder to be task inde-
pendent and constant.
The rest of the paper is structured as follows.
Section 2 discusses the related work on semantic seg-
mentation. 3 explains the details of the proposed net-
work. Section 4 details the experimental setup and
results. Finally, section 5 summarizes the paper and
provides potential future directions.
Das, A., Kandan, S., Yogamani, S. and K
ˇ
rížek, P.
Design of Real-time Semantic Segmentation Decoder for Automated Driving.
DOI: 10.5220/0007366003930400
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 393-400
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
393

2 BACKGROUND
The main purpose of convolutional neural network
was to perform image classification so that an object
of a particular category can be predicted irrespective
of its rotation, translation and scale. But Long et al.
(Long et al., 2015) considered the same concept as en-
coder and added fully convolutional upsampling layer
using the concept of unpooling to construct the out-
put. Later deconvolution technique was introduced
instead of unpooling in (Badrinarayanan et al., 2015)
along with considering skip connections to pull en-
coded feature maps. As part of the recent advance-
ment in semantic segmentation tasks, high usage of
dilated convolution is observed in many works (Chen
et al., 2018a) (Chen et al., 2018b) (Hamaguchi et al.,
2017) (Romera et al., 2017) (Wang et al., 2018) (Yu
and Koltun, 2015) (Zhao et al., 2017) (Yang et al.,
2018), this is because it helps to grow the receptive
field exponentially without loss of resolution. As no-
table other works, DeepLab2 (Chen et al., 2018a) uses
spatial pyramid pooling in ResNet-101 and it includes
Conditional Random Fields (CRF) as well. RefineNet
(Lin et al., 2017) proposed a multi-path refinement
network that exploits information to perform better
segmentation in higher resolution. It basically refi-
nes features from low resolution in recursive manner
to obtain better prediction in high resolution. Though
none of the methods use task independent lightweight
encoder model as used in this work. Pohlen et al.
(Pohlen et al., 2017) proposed a ResNet like archi-
tecture that considers multi-scale input in two stream
process. One stream extracts features from full re-
solution to get knowledge about semantic boundaries
and the other one works on different dimension as re-
ceived from sequence of pooling layers to extract ro-
bust local features. ENet (Paszke et al., 2016) presen-
ted a network aimed for mobile devices where Res-
Net like architecture is considered as encoder and it
contains dilated convolution to extract semantic fe-
atures. Another realtime segmentation work, ICNet
(Zhao et al., 2017) reported a multi-branch architec-
ture where inputs in different resolution are conside-
red and it developed cascade feature fusion unit across
multiple branches. In one more recent paper, Context-
Net (Poudel et al., 2018) proposed multi-column en-
coder architecture and later fusion at decoder. A deep
network as encoder is used to extract contextual fe-
atures from relatively smaller resolution and another
encoder that is shallow in nature is added to extract
global features.
The methods mentioned above do not use task in-
dependent lightweight encoder model as used in this
work and do not support multi task learning practice.
3 PROPOSED METHOD
3.1 Overview
The reported work is conceptualized for the embed-
ded platform where the entire system can run on real
time, thus priority is execution speed over accuracy.
Similar to existing neural network architectures such
as FCN (Long et al., 2015), SegNet (Badrinarayanan
et al., 2015), UNet (Ronneberger et al., 2015) for seg-
mentation, the proposed network has also two parts
which are encoder and decoder, which is furnished
in Figure 1. An encoder is basically a Convolutional
Neural Network (CNN) that helps to extract features
from various feature dimensions and thus reduces the
problem space as it becomes deeper. A decoder does
the opposite of encoder, it consumes the feature maps
from last layer as well as intermediate layers of enco-
der and reconstructs the original input space. For re-
construction we use deconvolution layer instead max-
unpooling as used in SegNet (Badrinarayanan et al.,
2015) and ENet (Paszke et al., 2016). Once the re-
construction is done then the decoder generates class
prediction for each pixel in original input space.
3.2 Encoder
It is mentioned earlier that the intention of this study
is to develop a lightweight decoder for segmentation
task where the encoder is task independent. It means
that the features extracted by the single encoder will
be shared across all decoders to accomplish separate
tasks (segmentation, detection, classification etc.). In
the context of our work, it is observed that the en-
coder design is mostly specific to the semantic seg-
mentation task such as (Badrinarayanan et al., 2015),
(Romera et al., 2017), (Treml et al., 2016), (Yu and
Koltun, 2015), thus these encoders had all necessary
components to extract semantic features and the de-
coder performs well with the readily available infor-
mation. However, our study is intended towards use
of a more generic encoder. So we designed a task
independent, designed a VGG (Simonyan and Zisser-
man, 2014) style classifier of 10 layers as encoder and
no special attention given for semantic segmentation
such as heavy usage of dilated convolution as used in
(Chen et al., 2018a) (Chen et al., 2018b) (Hamaguchi
et al., 2017) (Romera et al., 2017) (Wang et al., 2018)
(Yu and Koltun, 2015) (Zhao et al., 2017) (Yang et al.,
2018) or information fusion at different resolution
(Lin et al., 2017) (Poudel et al., 2018) (Zhao et al.,
2017) (Zhang et al., 2018).
As per Figure 3, convolution with stride 2 follo-
wed by max-pooling is used to reduce the problem
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
394

Figure 1: Typical encoder-decoder architecture of CNN based semantic segmentation network.
space, thus reducing the number of hyperparameters
and also the run-time. Obviously, this is a trade-off
for segmentation accuracy, but that is not the case for
other tasks like detection, classification etc. Conside-
ring this encoder to be function independent, this gap
of spatial information exploration needs to be over-
come in the decoder side by learning semantic fea-
tures extensively. Convolution layers are added se-
quentially along with increasing width and decrea-
sing feature space in regular interval. All the convolu-
tion layers use kernel of size 5X5 followed by Batch-
Normalization (Ioffe and Szegedy, 2015) to speed up
the convergence and ReLU (Nair and Hinton, 2010)
to add non-linearity. The last layer of encoder produ-
ces total 256 feature maps.
3.3 Decoder
The proposed architecture of decoder has been obtai-
ned after redesigning the existing features of the
convolutional nets, such as residual learning (He
et al., 2016) and non-bottleneck layers (Romera et al.,
2017). In the recent past, learning through residual
blocks has shown breakthrough performance in many
vision related tasks and made it possible to make the
network grow more deeper very easily. This advance-
ment helped to outperform significantly in many ob-
ject recognition tasks. Further the same learning stra-
tegy has been also used for semantic segmentation as
in (Romera et al., 2017). However, in (Das and Yoga-
mani, 2018), it has been demonstrated that residual le-
arning for a network with lesser depth is not efficient.
This is because the network can not handle high gra-
dient flow during back-propagation. To circumvent
this issue, in this study, the original residual learning
(He et al., 2016) strategy has been modified with an
adequate arrangement to distribute the high gradients
through multiple skip connections.
As per our design of the encoder, it can be realized
that there has been no suitable mechanism employed
to extract semantic features. Now, following with the
recent trend, if the decoder is going to have only few
set of deconvolution layers to reconstruct the output
then the segmentation result will be definitely poor.
The reason is the performance of the decoder is li-
mited to the knowledge shared by the encoder and as
per our design, the encoder is expected to share kno-
wledge that is non-semantic in nature. To address this
affair, there is a requisite to learn semantic informa-
tion from the encoded feature space in the decoder.
Hence, we need non-bottleneck blocks between two
deconvolution layers. In (Romera et al., 2017), the
authors have designed non-bottleneck layer which is
1D in nature and claimed to be a better regularizer and
also faster. The same non-bottleneck layer is used in
the encoder as well and most of the convolutions are
dilated.
The design of our non-bottleneck layer is shown
in Figure 2. It contains both 1D and 3D kernels.
1D kernel is used to extract information mainly in
one direction at a time and 3D kernel is for gather-
ing features from bigger receptive area. Later we try
to look for dense information through multiple ker-
nels with different sizes for example 3X3, 5X5 and
1X1 respectively. Following this, the features extrac-
ted using different kernels are fused. This method
helps to summarize the semantic features that are col-
lected from different receptive area. The resultant fe-
atures are again fused with the input features to the
same non-bottleneck layer. The multiple skip con-
nections to the feature fusion blocks in the proposed
non-bottleneck layer help to handle high gradient flow
because during back-propagation the incoming gra-
dient gets distributed among all paths. As per Figure
2, our non-bottleneck layer has two variants that are
type-1 (left) and type-2 (right). The only difference
between two variants is the block at the right uses di-
lated convolution where the kernel size is 3X3 and
5X5. Dilated convolution helps to extract spatial in-
formation by expanding the field-of-view as per the
dilation factor while maintaining the same resolution.
With increasing dilation rate, receptive field is also
expanded however, for the present work the dilation
rate has been kept constant and it is 1. It is possible to
receive better accuracy with incremental dilation rate
but dilated convolution is computationally expensive
and it becomes more costlier as the dilation rate in-
creases. Considering the present study to be aimed
for embedded platform, usage of similar features need
to be employed carefully to meet the run-time. After
each convolution operation, ReLU (Nair and Hinton,
2010) is used as activation unit for better convergence
Design of Real-time Semantic Segmentation Decoder for Automated Driving
395
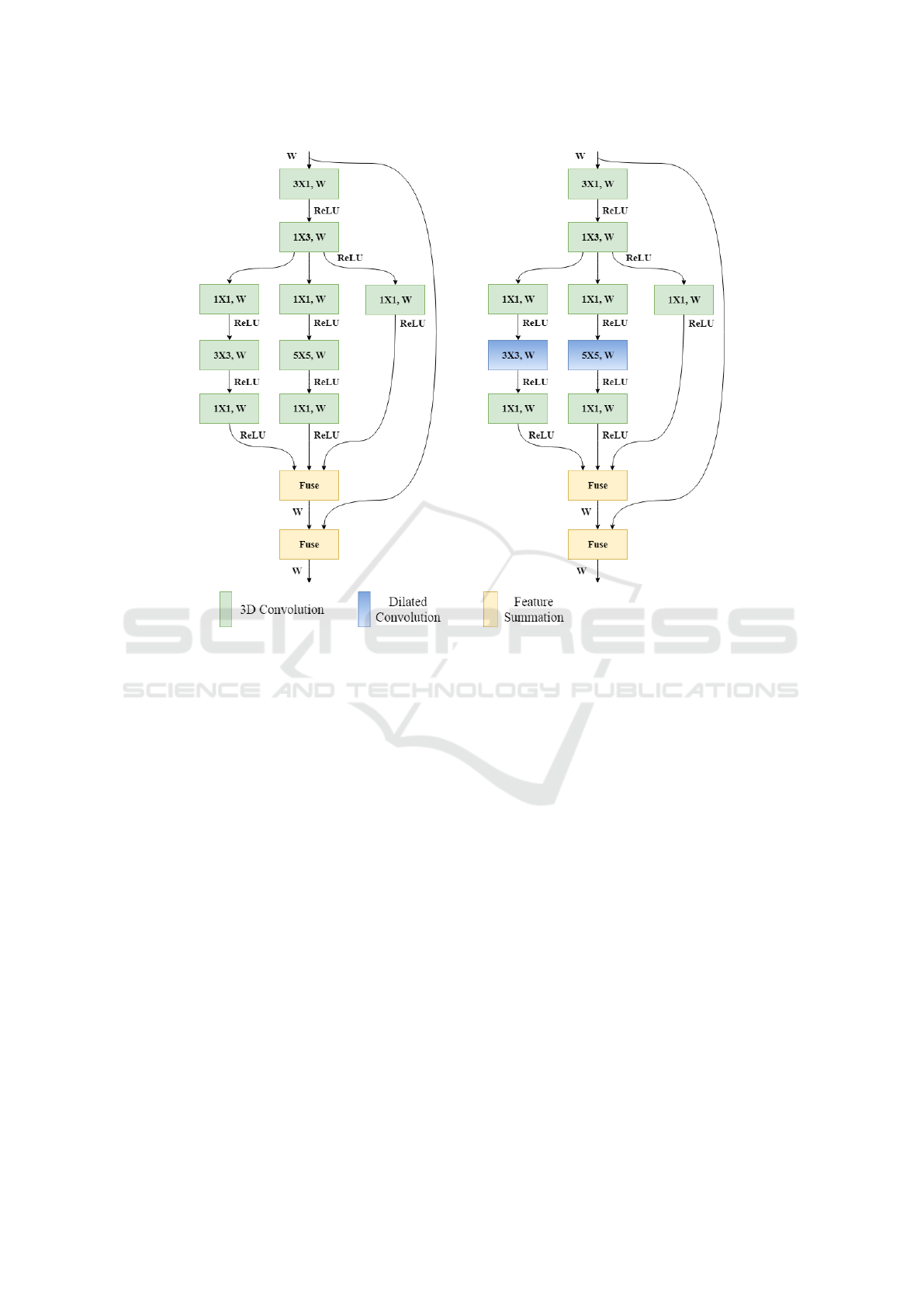
Figure 2: Illustration of non-bottleneck layers.
(Krizhevsky et al., 2012).
3.4 Encoder-Decoder Architecture
Figure 3 shows the encoder-decoder pair that is used
in this work. The encoder is a very generic one and
the decoder is our main proposal. The feature maps
passed from the encoder are downsampled from 256
to 4 as the present study concentrates on 4 classes.
One can argue that drastic change in the number of
feature maps such as this can impact on accuracy but
if we make the decoder wider that will shoot up the
runtime significantly. Thus decreasing the number
of feature maps in regular interval is not affordable
and out of our budget. After first deconvolution layer,
non-bottleneck layer of type-1 is used two times. Fol-
lowing second and third deconvolution layers, non-
bottleneck layers of type-2 are used twice and once
respectively. There is no non-bottleneck layer used
after fourth deconvolution. The non-bottleneck layers
are designed in such a way that first repetitive usage of
type-1 as intermediate block between two deconvolu-
tion layers and then having multiple type-2 especially
between the later deconvolution layers will help to re-
move the gap of learning semantic information that
we have seen in the encoder side. Hence, our propo-
sed non-bottleneck layer is generic and can be used
for any segmentation task. Also we pulled intermedi-
ate feature maps from the second and third last con-
volution layers of the encoder. This has to be highlig-
hted that our encoder consumed most of the run time
because it is much wider than the decoder. To circum-
vent this issue, we could use the concept of group con-
volution as proposed by Xie et al. (Xie et al., 2017)
but in (Das et al., 2018), it has been experimentally
demonstrated that aggregated residual transformation
shows adverse effect for lightweight networks such as
our encoder.
Details on how to train our proposed network end-
to-end, other training strategy and hyperparameter de-
tails, are discussed in the next section.
4 EXPERIMENTS
We have performed thorough investigation to show
the efficacy and robustness of our proposed network.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
396
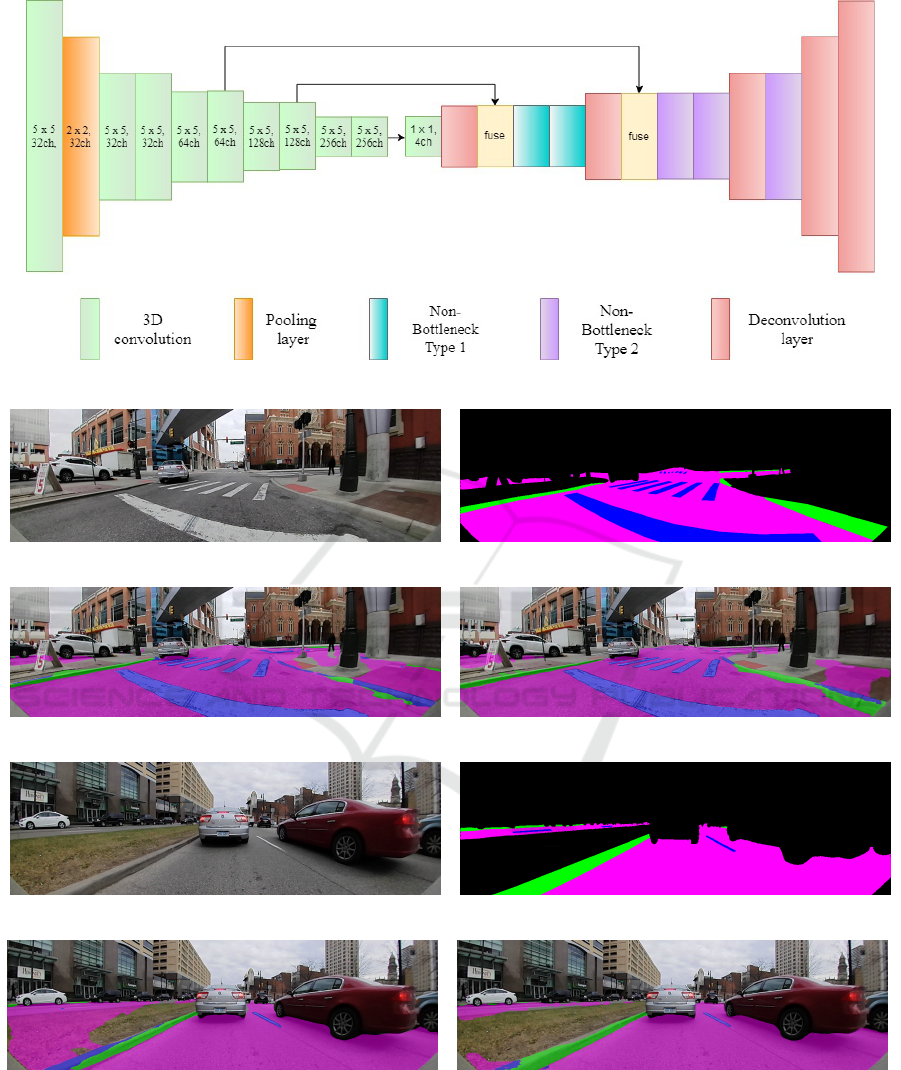
Figure 3: CNN based encoder-decoder architecture used for semantic segmentation task.
(a) Input Image - Example 1 (b) Ground Truth - Example 1
(c) FCN Output - Example 1 (d) Proposed Decoder Output - Example 1
(e) Input Image - Example 2 (f) Ground Truth - Example 2
(g) FCN Output - Example 2 (h) Proposed Decoder Output - Example 2
Figure 4: Comparison of proposed optimal decoder against a standard FCN decoder.
Dataset. We have used dataset that is owned by our
organization. However, some samples of the data-
set are shown in Figure 4. In this dataset, dimension
of each image is 1280X384. Samples are highly va-
ried in nature and mostly urban scenes. Diverse lig-
hting conditions and presence of dense shadow make
this dataset challenging. In the present study, to per-
form semantic segmentation, we concentrated only
Design of Real-time Semantic Segmentation Decoder for Automated Driving
397

on 4 critical classes that are lanes, curb, road and
void (everything else). The entire dataset is divided
into Training, Validation and Test set each containing
3016, 981 and 1002 images respectively. Correspon-
ding each sample image, single channel annotation
was developed where each pixel has only one class
label.
Training. First we train our encoder from scratch
on ImageNet and then transfer the weights for the pre-
sent task. This transfer learning will help to get better
initialization of the weights at the beginning of the
training for semantic segmentation. The pre-training
on a much larger dataset was required because our
model is quite shallow and the dataset used in this
work is very small in size. Consequently there is a
high chance that the network will suffer from over-
fitting due to lack of training samples. We could fol-
low the concept of layer-wise training in a supervised
fashion to train the encoder to extract more robust fe-
atures as reported in (Roy et al., 2016) as the encoder
used in this work is quite lightweight. Implementation
of the proposed network and all experiments are exe-
cuted using Keras (Chollet et al., 2015) framework.
We considered very popular Adam (Kingma and Ba,
2014) as optimizer. Regarding the other network con-
figuration, weight decay and batch size were set to 0.9
and 4 respectively. Training was started with 0.0005
as initial learning rate including standard polynomial
decay strategy to decrease this value over 350K itera-
tions. Dropout (Srivastava et al., 2014) is not used in
our model. For all experiments, we used NVIDIA Ti-
tan X 12G GPU with 24 GB RAM. No data augmen-
tation technique has been performed during training.
Experimental Results and Comparison Study.
The hardware that we use is designed with automo-
tive power constraints in mind, thus having restricted
number of features for design of a convolutional neu-
ral network. Also we intend to utilize a generic en-
coder network that stays well within the budget.Thus
our main objective is to design an efficient decoder
that satisfies both these constraints. In the course of
design of an efficient decoder, we have experimen-
ted multiple versions of decoder all of which are ex-
plained later in this section. With all these deco-
ders VGG10 pre-trained with Imagenet is used as the
encoder. This will help to have fair comparison of
the different variants of the decoder. The entire net-
work containing the encoder along with different de-
coders is trained end to end with the available pixel-
wise ground truth label. All these variants of decoder
reported in Table 1, fits all our constraints. It is quite
general while capturing an urban scene, there will be
very limited region occupied by lanes, curbs but it is
exactly opposite for roads and void classes. So we
clearly see that for effective learning there is a huge
gap in problem space in these two classes while com-
paring with other. Without even attempting any data
augmentation and class weighing technique, our non-
bottleneck layers worked better for curb though there
is a slight deterioration for lanes. To evaluate the seg-
mentation performance on all the designed decoders,
widely used Intersection over Union (IoU) metric is
considered and details are furnished in Table 1.
As put forth earlier, we did experiments with se-
veral combinations of Non-Bottleneck layers in the
network whose results are updated in Table 1. De-
coder D1 uses our proposed non-bottleneck layer wit-
hout 1X1 convolution after 3X3 and 5X5 convolution.
Decoder D2 is same as D1 but it does not use second
skip connection from encoder. Decoder D3 shares the
same configuration as D2 but the batch size during
training was 8 whereas it was 4 for D2. Decoder D4
is same as D3 but it does not use 1X1 convolution
even before 3X3 and 5X5 convolution. Decoder D5
is a bit different. After first deconvolution layer two
sets of 3X1, 1X3 convolutions followed by ReLU is
used. Also it uses skip connection to fuse the resul-
tant features with the input feature maps of first 3X1
convolution. After second deconvolution layer, one
3X3 dilated convolution with dilation rate 1 is used
and then the same non-bottleneck as used after first
deconvolution layer. Only 3X3 dilated convolution
with dilation rate 1 is used after third and fourth de-
convolution layer. Decoder D6 is same as D5 but it
uses batch size as 4 where 8 was used in D5. Decoder
D7 is different in terms of kernel size in deconvolu-
tion layers. It uses kernel of size 2X2 in first and se-
cond, 3X3 in third and fourth, 5X5 in fifth upsampling
layer. Decoder D8 uses same non-bottleneck as D7
without 3X3 and 5X5 convolution. In the pattern mNp
in Table 1, m stands for number of non-Bottleneck (N)
layers, p stands for the type of non-bottleneck layer.
Representation within braces ( and ) stands for set of
non-bottleneck layers after a deconvolution layer star-
ting from the first one. Further to explore more, we
have modified the design of our non-bottleneck layer
from various aspects to check what variant of change
seems to work better. Please note that the modified
non-bottleneck layers are non-repetitive between two
deconvolution layers. Of the different decoder vari-
ant, the best version is the one put forth in Figure
3, which is obtained after several optimization efforts
and this network uses the Non-bottleneck layers de-
tailed in Figure 2. This network also takes care of
the class imbalance for Lanes and Curb and impro-
ves its class-wise IoU. We also compared the runtime
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
398
Table 1: Results of different variants of our decoder with non-bottleneck layer and VGG10 as encoder for semantic segmen-
tation on our dataset.
Avg. class accuracy Avg. class IoU score
Decoder configuration Lanes Curb Road Lanes Curb Road Mean
D1 0.5678 0.6228 0.9688 0.4943 0.4296 0.9265 0.7255
D2 0.4363 0.6082 0.9694 0.4021 0.4445 0.9198 0.6989
D3 0.5096 0.5682 0.9689 0.4333 0.4264 0.9254 0.7038
D4 0.4769 0.5932 0.9684 0.4152 0.4534 0.9248 0.7013
D5 0.4561 0.6059 0.9668 0.4013 0.403 0.9138 0.6866
D6 0.5775 0.6539 0.9566 0.4567 0.4198 0.9154 0.7106
D7 0.5263 0.4284 0.9464 0.4192 0.2911 0.8689 0.6458
D8 0.5628 0.6755 0.9686 0.4752 0.4717 0.9296 0.727
(2N1)(2N1)(2N2)(2N2) 0.6054 0.6534 0.9685 0.5294 0.4755 0.9299 0.742
(2N2)(2N2)(2N2)(2N2) 0.5951 0.647 0.9655 0.5061 0.5061 0.9267 0.7323
(2N2)(2N2)(2N2) 0.6 0.639 0.9661 0.5063 0.4391 0.9279 0.7315
(2N1)(2N1)(2N1)(2N1) 0.5743 0.6343 0.9691 0.4961 0.4486 0.9275 0.7284
(1N1-1N2)(1N1-1N2)(1N1-1N2)(1N1-1N2) 0.5938 0.6338 0.9681 0.5051 0.4438 0.9264 0.731
Optimal 0.6118 0.6588 0.9689 0.5304 0.4696 0.9314 0.7441
measurement of this network with the popular FCN
network on our custom hardware. We find that this
network has the advantage of improving the IoUs es-
pecially of the key classes with less than 2ms increase
in runtime. The sample segmentation outputs of our
proposed optimal decoder and a standard FCN deco-
der are shown in Figure 4.
5 CONCLUSION
Design of efficient encoders is a growing area of re-
search. In this work, we focused on design of effi-
cient decoders. Firstly, we designed a novel efficient
non-bottleneck layer and a family of decoders based
on this layer. We experimentally show that different
choice of decoder design had a large impact and the
optimal configuration had 10% improvement of accu-
racy in terms of mean IoU over a baseline configu-
ration. In particular, for more difficult segmentation
classes like lanes and curb, higher improvements of
12% and 18% were obtained. Thus we demonstrate
that the design of an efficient decoder can play a cri-
tical role for segmentation tasks as it covers a signi-
ficant portion of the overall computation of the net-
work. We hope that our preliminary study demonstra-
tes the need for further research on efficient decoders.
In future work, we build a systematic family of meta-
architectures with a fixed run-time budget and learn
the optimal configuration using meta-learning techni-
ques.
REFERENCES
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2015).
Segnet: A deep convolutional encoder-decoder ar-
chitecture for image segmentation. arXiv preprint
arXiv:1511.00561.
Briot, A., AI, G., Creteil, V., Viswanath, P., and Yogamani,
S. (2018). Analysis of efficient cnn design techni-
ques for semantic segmentation. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition Workshops, pages 663–672.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2018a). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE transactions on
pattern analysis and machine intelligence, 40(4):834–
848.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018b). Encoder-decoder with atrous se-
parable convolution for semantic image segmentation.
arXiv preprint arXiv:1802.02611.
Chollet, F. et al. (2015). Keras. https://keras.io.
Das, A., Boulay, T., Yogamani, S., and Ou, S. (2018). Eva-
luation of group convolution in lightweight deep net-
works for object classification. In Proceedings of the
24th International Conference on Pattern Recognition
Workshop.
Das, A. and Yogamani, S. (2018). Evaluation of residual
learning in lightweight deep networks for object clas-
sification. In Proceedings of the 20th Irish Machine
Vision and Image Processing Conference, pages 205–
208.
Hamaguchi, R., Fujita, A., Nemoto, K., Imaizumi, T., and
Hikosaka, S. (2017). Effective use of dilated convolu-
tions for segmenting small object instances in remote
sensing imagery. CoRR, abs/1709.00179.
Design of Real-time Semantic Segmentation Decoder for Automated Driving
399

He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resi-
dual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Ioffe, S. and Szegedy, C. (2015). Batch normalization:
Accelerating deep network training by reducing inter-
nal covariate shift. arXiv preprint arXiv:1502.03167.
Kingma, D. P. and Ba, J. (2014). Adam: A method for sto-
chastic optimization. arXiv preprint arXiv:1412.6980.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in neural information pro-
cessing systems, pages 1097–1105.
Lin, G., Milan, A., Shen, C., and Reid, I. D. (2017).
Refinenet: Multi-path refinement networks for high-
resolution semantic segmentation. In Cvpr, volume 1,
page 5.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 3431–3440.
Nair, V. and Hinton, G. E. (2010). Rectified linear units im-
prove restricted boltzmann machines. In Proceedings
of the 27th international conference on machine lear-
ning (ICML-10), pages 807–814.
Paszke, A., Chaurasia, A., Kim, S., and Culurciello, E.
(2016). Enet: A deep neural network architecture
for real-time semantic segmentation. arXiv preprint
arXiv:1606.02147.
Pohlen, T., Hermans, A., Mathias, M., and Leibe, B. (2017).
Fullresolution residual networks for semantic segmen-
tation in street scenes. arXiv preprint.
Poudel, R. P., Bonde, U., Liwicki, S., and Zach, C.
(2018). Contextnet: Exploring context and detail for
semantic segmentation in real-time. arXiv preprint
arXiv:1805.04554.
Romera, E., Alvarez, J. M., Bergasa, L. M., and Arroyo,
R. (2017). Efficient convnet for real-time semantic
segmentation. In IEEE Intelligent Vehicles Symp.(IV),
pages 1789–1794.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Roy, S., Das, A., and Bhattacharya, U. (2016). Generali-
zed stacking of layerwise-trained deep convolutional
neural networks for document image classification. In
Pattern Recognition (ICPR), 2016 23rd International
Conference on, pages 1273–1278. IEEE.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: a simple way
to prevent neural networks from overfitting. The Jour-
nal of Machine Learning Research, 15(1):1929–1958.
Treml, M., Arjona-Medina, J., Unterthiner, T., Durgesh, R.,
Friedmann, F., Schuberth, P., Mayr, A., Heusel, M.,
Hofmarcher, M., Widrich, M., et al. (2016). Speeding
up semantic segmentation for autonomous driving. In
MLITS, NIPS Workshop.
Wang, P., Chen, P., Yuan, Y., Liu, D., Huang, Z., Hou, X.,
and Cottrell, G. (2018). Understanding convolution
for semantic segmentation. In 2018 IEEE Winter Con-
ference on Applications of Computer Vision (WACV),
pages 1451–1460. IEEE.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Computer Vision and Pattern Recogni-
tion (CVPR), 2017 IEEE Conference on, pages 5987–
5995. IEEE.
Yang, M., Yu, K., Zhang, C., Li, Z., and Yang, K. (2018).
Denseaspp for semantic segmentation in street scenes.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 3684–3692.
Yu, F. and Koltun, V. (2015). Multi-scale context ag-
gregation by dilated convolutions. arXiv preprint
arXiv:1511.07122.
Zhang, Z., Zhang, X., Peng, C., Cheng, D., and Sun, J.
(2018). Exfuse: Enhancing feature fusion for seman-
tic segmentation. arXiv preprint arXiv:1804.03821.
Zhao, H., Qi, X., Shen, X., Shi, J., and Jia, J. (2017).
Icnet for real-time semantic segmentation on high-
resolution images. arXiv preprint arXiv:1704.08545.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
400
