
Novel View Synthesis using Feature-preserving Depth Map Resampling
Duo Chen, Jie Feng and Bingfeng Zhou
Institute of Computer Science and Technology, Peking University, Beijing, China
Keywords:
Novel View Synthesis, Depth Map, Importance Sampling, Image Projection.
Abstract:
In this paper, we present a new method for synthesizing images of a 3D scene at novel viewpoints, based on a
set of reference images taken in a casual manner. With such an image set as input, our method first reconstruct
a sparse 3D point cloud of the scene, and then it is projected to each reference image to get a set of depth
points. Afterwards, an improved error-diffusion sampling method is utilized to generate a sampling point set
in each reference image, which includes the depth points and preserves the image features well. Therefore the
image can be triangulated on the basis of the sampling point set. Then, we propose a distance metric based on
Euclidean distance, color similarity and boundary distribution to propagate depth information from the depth
points to the rest of sampling points, and hence a dense depth map can be generated by interpolation in the
triangle mesh. Given a desired viewpoint, several closest reference viewpoints are selected, and their colored
depth maps are projected to the novel view. Finally, multiple projected images are merged to fill the holes
caused by occusion, and result in a complete novel view. Experimental results demonstrate that our method
can achieve high quality results for outdoor scenes that contain challenging objects.
1 INTRODUCTION
Given a set of reference images of a scene, novel view
synthesis (NVS) methods aim to render the scene at
novel viewpoints. NVS is an important task in com-
puter vision and graphics, and is useful in areas such
as stereo display and virtual reality. Its applications
include 3DTV, Google Street View (Anguelov et al.,
2010), scene roaming and teleconferencing.
NVS methods can be divided into two categories:
small-baseline methods and large-baseline methods,
where “baseline” refers to the translation and rotation
between adjacent viewpoints.
In the case of small-baseline problems, some
methods focus on parameterizing the plenoptic func-
tion with high sampling density. They arrange the
camera positions in well-designed manners and sam-
ple the scene uniformly with reference images. Typ-
ical examples include light field (Levoy et al., 1996)
and unstructured lumigraphs (Buehler et al., 2001).
Some other methods (Mahajan et al., 2009; Evers-
Senne and Koch, 2003) were proposed to produce
novel views by interpolating video frames, where ad-
jacent video frames have close viewpoints. Some
methods based on optical flow also belong to the
small-baseline category.
On the other hand, large-baseline NVS is a chal-
lenging, under constrained problem due to the lack of
full 3D knowledge, scale changes and complex oc-
clusions. It is thus necessary to seek additional depth
and geometry information or constraints like photo-
consistency and color-consistency.
For example, Google Street View (Anguelov et al.,
2010) directly acquire depth information with laser
scanners to interpolate large-baseline images. Some
other methods utilize structure-from-motion (SFM)
and multi-view stereo (MVS) to recover sparse 3D
point cloud of the scene and synthesis novel views
based on them. For instance, the rendering algo-
rithm of Chaurasia et al. (Chaurasia et al., 2013) syn-
thesized depth for the poorly constructed regions of
MVS and provides a plausible image-based naviga-
tion. However, their approach is limited by the ca-
pabilities of the oversegmentation, and the very thin
structures in the novel view may be missing.
Recent works also address the problem of large-
baseline NVS by training neural networks in an end-
to-end manner (Flynn et al., 2016). These methods
only require sets of posed images as training dataset,
and are general since they can give good results on
test sets that are considerably different from the train-
ing set. These methods are usually slower than MVS
based methods, and detailed textures in the images are
usually blurred. Moreover, the relationship between
3D objects and their 2D projections has a clear for-
mulation, and requiring neural networks to learn this
Chen, D., Feng, J. and Zhou, B.
Novel View Synthesis using Feature-preserving Depth Map Resampling.
DOI: 10.5220/0007308701930200
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 193-200
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
193

relationship is inefficient.
The input of our method is a set of photographs
of the scene captured with common commercial cam-
eras, and the camera positions are selected in a ca-
sual manner rather than pre-designed. The position of
novel viewpoints can also be arbitrary, as long as it
is not too far from the existing camera positions. We
first reconstruct the scene using SfM and MVS, and
the resulting 3D point cloud is projected to reference
camera positions to get per-view coarse depth maps.
We then apply a feature-preserving sampling and tri-
angulation method to the input images, followed by a
depth propagation step to generate dense depth maps.
Finally, the novel view can be rendered by an image
projection and merging step.
The main contributions of this paper include:
1. We present a method to achieve high quality large-
baseline NVS for challenging scenes. The pro-
posed approach decomposes the problem into four
steps: 1) sparse 3D point cloud reconstruction,
2) importance sampling, 3) depth propagation and
4)image projection and merging.
2. A novel depth propagation algorithm to generate
pixel-wise depth map for reference images based
on resampling and triangulation.
2 RELATED WORK
2.1 Image-based Rendering
Unlike traditional approaches based on geometry
primitives, image-based rendering (IBR) techniques
render novel views based on input image sets. IBR
techniques can be classified into different categories
according to how much geometry information they
use.
Light field rendering (Levoy et al., 1996) and un-
structured lumigraphs (Buehler et al., 2001) are repre-
sentative techniques for rendering with no geometry.
They characterize subsets of the plenoptic function
from high-density discrete samples, and novel views
can be rendered in real time using light fields or lumi-
graphs. The main limitation of these methods is that
they all require high sampling density, and rendering
novel views far from the existing viewpoints is very
challenging.
View interpolation approaches (Stich et al., 2008;
Mahajan et al., 2009) rely on implicit geometry and
are able to create high-quality transitions between
image sequences or video frames. However, these
methods are only suitable for small-baseline tasks and
hence beyond our consideration.
Some recent works take advantage of the mod-
ern multi-view stereo (MVS) techniques. They uti-
lize the sparse point cloud generated by MVS as
geometric proxies, and project input images to the
novel view. Since these point clouds usually have
poorly constructed regions, Goesele et al. use am-
bient point cloud (Goesele et al., 2010) to represent
unconstructed regions of the scene, and render them
in a non-photorealistic style.
2.2 3D Reconstruction
Structure-from-motion (SfM) has been widely used
for 3D reconstruction from uncontrolled photo collec-
tions. Taken a set of images along with their intrinsic
camera parameters as input, a typical SfM system ex-
tracts feature points in each image and matches them
between image pairs. Then, starting from an initial
two-view reconstruction, the 3D point cloud and per
image external camera matrix is reconstructed by iter-
atively adding new images, triangulating feature point
matches and bundle-adjusting the 3D points and cam-
era poses (Wu, 2013).
Multi-view stereo (MVS) algorithms can recon-
struct reasonable point clouds from multiple pho-
tographs or video clips. The method proposed by Fu-
rukawa and Ponce (Furukawa and Ponce, 2010) takes
multiple calibrated photographs as input, and match
images at both per-pixel and per-view level. The
matching results are improved by optimizing the sur-
face normal within a photo-consistency measure, and
lead to a dense set of patches covering the surfaces of
the object or scene.
However, point clouds reconstructed by MVS are
still relatively sparse, and their distribution is usu-
ally irregular. Although these MVS methods work
well for regular scenes like buildings and sculptures,
objects with complex occlusions or texture-poor sur-
faces are usually poorly constructed or totally miss-
ing, due to the lack of photo-consistency in these re-
gions. Without accurate depth information, MVS-
based NVS approaches are prone to generate unrealis-
tic results, including tearing of occlusion boundaries,
elimination of complete textures or aliasing in such
challenging scenes.
2.3 Depth Synthesis
When depth information is available for every pixel in
reference images, a novel view can be rendered at any
nearby viewpoint by projecting the pixels of the refer-
ence images back to the 3D world coordinate system
and re-projecting them to the novel viewpoint. Thus,
synthesizing dense depth maps from sparse ones is
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
194
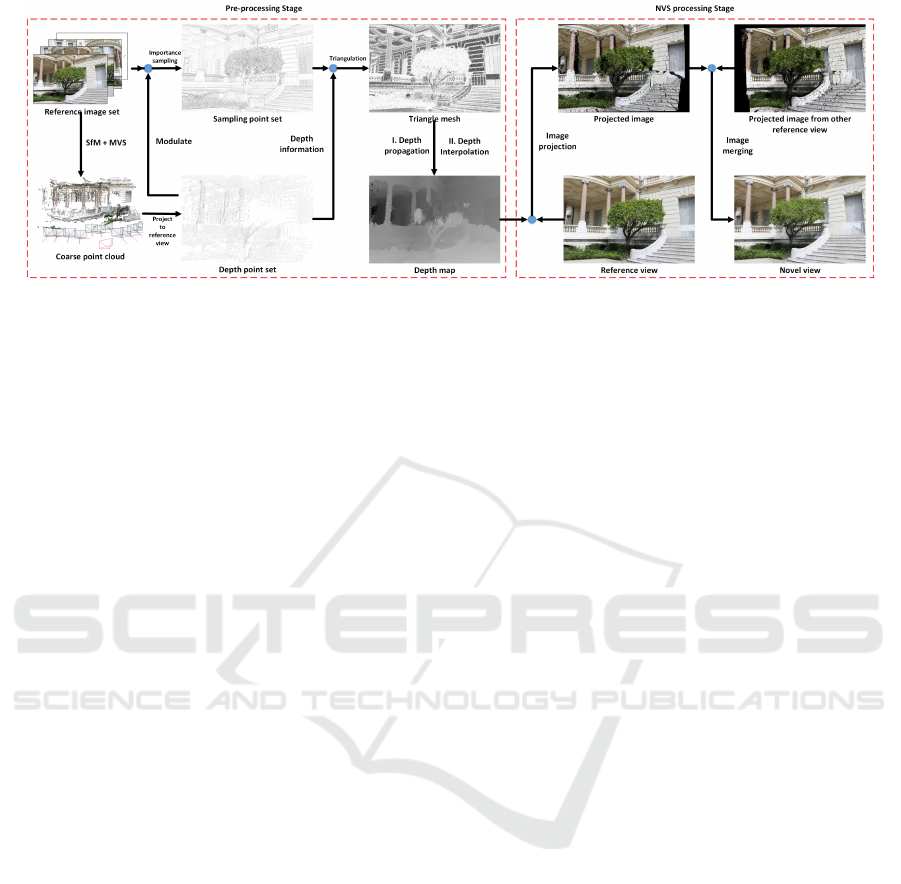
Figure 1: The pipeline of our method.
necessary for our task.
Several works focus on generating dense depth
maps by propagating depth samples to the uncon-
structed pixels of the image. The method proposed
by Lhuillier and Quan (Lhuillier and Quan, 2003) re-
constructs per-view depth maps and introduce a con-
sistent triangulation of depth maps for pairs of views.
Snavely et al. (Snavely et al., 2006) detect intensity
edges using a Canny edge detector, and smoothly in-
terpolate depth maps by placing depth discontinuities
across the edges. Hawe et al. (Hawe et al., 2011)
present an algorithm for dense disparity map recon-
struction from sparse yet reliable disparity measure-
ments. They perform the reconstruction by making
use of the sparsity in wavelet domain based on the the-
ory of compressive sensing. In the work of Chaurasia
et al. (Chaurasia et al., 2013), depth information is
synthesized for poorly reconstructed regions based on
oversegmented superpixels and a graph traversal algo-
rithm. A following shape-preserving warp algorithm
is implemented to achieve image-based navigation.
2.4 Importance Sampling
In this paper, sampling refers to the process of gener-
ating a set of representative pixels from continuous
images, with certain functions controlling the sam-
pling density in different regions. The sampling point
set should preserve the features of input images and
has good distribution property.
In 2001, Ostromoukhov proposed an improved
error-diffusion algorithm by applying variable co-
efficients for different key levels (Ostromoukhov,
2001). Zhou and Fang (Zhou and Fang, 2003) made
furhter improvement using threshold modulation to
remove visual artifacts in the variable-coefficient
error-diffusion algorithm. By controlling the level of
the modulation strength, an optimal result with blue-
noise property can be achieved.
Zhao et al. (Zhao et al., 2013) proposed a high-
efficiency image vectorization method based on im-
portance sampling and triangulation. In this method,
a sampling point set is generated on the image plane
according to an important function defined by struc-
ture and color features. Hence this sampling point
set can preserve both edge and internal features in
the image, and possesses good distribution property.
The areas with significant features have higher impor-
tance value together with sample point density, and
vise verse. By triangulating the sampling points and
interpolating color inside the triangles, the image can
be easily recovered.
3 OUR APPROACH
3.1 Overview
In this paper, we propose a NVS method based on
feature-preserving depth map resampling and triangu-
lation. The input of our method is a set of reference
images taken from different viewpoints of a scene
(noted as reference image set). For a desired novel
viewpoint, our method is able to generate plausible
novel view image. As shown in Fig.1, the method in-
cludes the following steps:
1) 3D reconstruction and Propagation. First, we
use SfM to extract camera matrices for each input im-
age and reconstruct a very sparse 3D point cloud of
the scene, and then refine it by MVS. The resulting
point cloud is projected to each reference viewpoint,
providing depth information to a set of points (noted
as depth point set) in each reference image.
2) Importance Sampling. Next, an importance func-
tion is defined based on the boundaries and feature
lines in each reference image. Then a sampling point
set is generated according to the importance func-
tion and the depth point set, using an improved error-
diffusion algorithm. The sampling points are triangu-
lated to form a triangle mesh.
Novel View Synthesis using Feature-preserving Depth Map Resampling
195

3) Depth Propation. Afterwards, with a distance
metric which considers Euclidean distance, color sim-
ilarity and color gradient, depth information is propa-
gated from the depth point set to the whole sampling
point set, and depth values are interpolated in each
triangle to reconstruct a dense depth map.
4) Image Projection and Merging. Finally, given
a desired novel viewpoint, several input images are
chosen as reference, and their corresponding col-
ored depth maps are projected onto the novel image
plane. The projected images are merged, and the
holes caused by occlusion are filled to obtain the fi-
nal image.
Note that in this pipeline, step 1)∼3) belong to
the pre-processing stage, and hence runs offline only
once. Step 4) is performed online, according to the
desired novel viewpoint.
3.2 3D Reconstruction and Projection
Our input is a set of images {I
i
|i = 1...n} of a
3D scene taken by commercial cameras at differ-
ent viewpoints, together with their intrinsic matrices
{K
i
|i = 1...n}. The camera positions are chosen in
a casual manner rather than requiring specific con-
straints (Fig.2(b)). Instead of reconstructing the com-
plete 3D geometry of the scene, we demonstrate that
a sparse point cloud generated by MVS can provide
enough depth information to generate reliable pixel-
wise depth maps for novel view synthesis.
First, we adopt an SfM method (Wu, 2013) to
extract extrinsic matrices for each camera position,
that is, {R
i
|i = 1...n} for rotation and {t
i
|i = 1...n}
for translation. SfM methods can also reconstruct a
sparse point cloud of the scene. On the basis of that,
we further utilize an MVS method (Furukawa and
Ponce, 2010) to refine the 3D point cloud. For the
datasets we use in this paper, the MVS method typ-
ically reconstruct 100k∼200k points from 10 to 30
images with 4M∼6M resolution. The reconstructed
point cloud is irregular for all scenes, regions like
vegetation and walls are often poorly reconstructed
(Fig.2(c)). The depth information for these regions
will be compensated in the following depth synthesis
step.
Then, the 3D point cloud is projected to each ref-
erence viewpoint, producing a set of projected points
with depth information in each input image (Fig.2(c)).
The 3D points and their projections are denoted in ho-
mogeneous notations P = (x,y,z,1) and p = (u,v,1) re-
spectively. The projection is formulated as:
zp = K[R|T]P. (1)
Notice that, some of the projected points should
(a) Reference image set (b) Sparse point cloud
(c) Depth point set projected to a refer-
ence view
Figure 2: Input images and reconstructed sparse point
cloud. Note the poorly reconstructed regions shown in (c).
be discarded because of occlusions. While the dis-
tant objects are usually occulded by the near ob-
jects, points belonging to distant objects are hardly
occluded by the near points since they are very sparse,
and therefore wrong depth values will be introduced
to the image.
We tackle this problem by making use of photo-
consistency, i.e., a 3D point P
1
= (r
1
,g
1
,b
1
) should
have similar color with its corresponding projected
point P
2
= (r
2
,g
2
,b
2
) for any viewpoint. Therefore,
the projected points whose colors are seriously differ-
ent from their sources will be marked as outliers and
then discarded.
This process also helps to eliminate mistakes in
the sparse point cloud. When the global illumi-
nation does not change radically, the normal Eu-
clidean distance in the RGB or a modified HSV space
works nearly equally for evaluating color changes
(Hill et al., 1997). Therefore, the color similarity is
measured with the Euclidean distance in RGB color
space throughout this paper.
3.3 Importance Sampling
The depth information produced by SfM / MVS tech-
niques is not sufficient for NVS, for significant re-
gions with very sparse or no depth information often
exist. That is because MVS methods reconstruct 3D
points based on feature points matching and photo-
consistency, which will become highly ambiguous for
objects with no or repetitive textures and complex ge-
ometry like self-occlusions. Besides, the number of
reconstructed 3D points is usually less than 5% of the
image pixels, hence the projected points will be sparse
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
196

Figure 3: The four templates of the improved Sobel opera-
tor.
and irregular in the depth maps. Directly interpolat-
ing the projected points is prone to create bulky depth
maps with errors near object silhouettes.
In general, depth maps usually consist of large
smooth regions with homogeneous depth values in-
side, and between them existing discontinuities where
depth values change rapidly. Regarding the work of
(Zhao et al., 2013), the large smooth regions can be
represented by a small number of sampling points,
while a large number of sampling points are needed
near the discontinuities.
Although the distribution of smooth regions and
discontinuities in depth maps is previously unknown,
an assumption can be made that discontinuities in the
depth map coincide with the edges in the correspond-
ing reference image. The assumption is not a pre-
cise one, but work well even for the datasets with
quite complex geometry, and the following processes
of sampling and triangulation are robust.
Based on that assumption, we first apply an im-
proved Sobel operator (Fig.3) to the reference images
to detect edge features. The improved Sobel operator
contains two more template for diagonal lines, hence
it is able to detect more detailed and accurate features
(shown in Fig.4(a)). Since the resulting gradient val-
ues x are integers ranging from 0 to the maxium gra-
dient over the whole image, we define an importance
function F to map x from [0,max] to [0,255]:
F(x) = 255[1 − (
x
max
)
γ
], x ∈ [0, max]. (2)
Here, γ ∈ [0,1] is a constant that controls the im-
portance function. Higher γ will raise the importance
of pixels near the edges, which leads to higher sam-
pling density in these areas, and much lower den-
sity in smooth regions. The distribution of sampling
(a) Egde features (b) The sampling point set
Figure 4: The gradient map (a) preserves the edge features
the reference image. The red points in (b) stand for the
original depth points.
points will be more uniform with lower γ. In our im-
plementation, we set γ to 0.8 to achieve high qual-
ity NVS. Additionally, the importance values of pro-
jected depth points are set to 0 (the highest impor-
tance) to make sure they are sampled.
So far, we obtain an pixel-wise importance map
with importance values ranging from 0 to 255. Then,
an improved error-diffusion sampling method (Zhao
et al., 2013) is performed according to the importance
map to produce the final sampling point set (shown in
Fig.4(b)). The number of sampling points is about 10
to 15 % of the total pixels. They have perfect blue-
noise distribution property, and preserve the edge and
internal features in reference images.
We denote the sampling point as P
s
, which in-
cludes the subset of projected depth points P
d
. Then,
taking P
s
as vertices, a triangle mesh is generated by
Delaunay triangluation (shown in Fig.5(a)). The gra-
dient and depth values can be stored in each vertex for
further depth propagation.
(a) Triangle mesh (b) Depth map
Figure 5: (a) Triangle mesh generated by Delaunay trian-
gulating the sampling points. (b) The generated pixel-wise
depth map.
3.4 Depth Propagation
In this step, we propose an efficient and robust ap-
proach to propagate depth information from the pro-
jected depth point set P
d
to the rest of sampling points
P
0
s
= P
s
-P
d
.
A common observation is that, pixels that are spa-
tially close usually belong to the same object and
hence have similar depth values, unless there is dis-
continuity between them. On another aspect, simi-
lar color in large smooth regions also implies similar
contents and depth values, while color discontinuities
roughly coincide with depth discontinuities.
Thus, we can define a distance function to eval-
uate the similarity between a pair of pixels, based
on both color and spatial proximity. Euclidean dis-
tance between points P
1
and P
2
is calculated in both
RGB color space and reference image coordinate to
describe their similarity. Linear weights k
1
and k
2
are
introduce to adjust their influence.
However, in complex outdoor scenes, neighboring
pixels in reference image may actually belong to
Novel View Synthesis using Feature-preserving Depth Map Resampling
197

distinct objects with very different depths, and in
some situations these pixels also have close colors.
Propagating depth information between these pixels
will destroy the desired discontinuities in the depth
map. We handle this problem by introducing a
penalty term C to limit depth propagation across
object boundaries. The penalty term between P
1
and
P
2
is computed based on the Sobel gradients stored
in the vertices which imply object boundaries in the
image. The final form of the distance function is:
D(P
1
, P
2
) = {k
1
[(r
1
− r
2
)
2
+ (g
1
− g
2
)
2
+ (b
1
− b
2
)
2
]
+k
2
[(u
1
− u
2
)
2
+ (v
1
− v
2
)
2
]}
1
2
+C(P
1
, P
2
). (3)
C(P
1
, P
2
) = argmin
Γ
∑
P
i
∈Γ
g(P
i
). (3)
Here Γ represents the set of paths between P
1
and P
2
on the triangle mesh. Since larger gradient values im-
ply edges in the image, we take the minimum sum
of the gradients along the paths as the penalty term
C(P
1
, P
2
). The shortest path can be calculated by the
Dijkstra shortest path algorithm.
During the closest point searching, a five-
dimensional kd-tree is built to achieve higher effi-
ciency. The five dimensions of the kd-nodes include
(u,v) in the image coordinate and (r,g,b) color values.
The distance between kd-nodes is defined similarly to
Eq.3, but without the penalty term. Using the kd-tree,
we find the nearest P
d
for each P
0
s
, and calculate the
final distance using Eq.3. Hence, for each point in P
0
s
,
its depth value can be propagated from its closest P
d
.
After propagating depth information to all the ver-
tices in the triangle mesh, the depth values can be in-
terpolated inside each triangle by a bilinear interpo-
lation and finally generate a dense pixel-wise depth
map (shown in Fig.5(b)).
3.5 Image Projection and Merging
After generating dense depth map for each reference
image, a novel view can be interpolated by image pro-
jection. Given a desired novel viewpoint, we first se-
lect several input images as reference based on their
camera positions and poses. Then each selected refer-
ence image is projected to the novel viewpoint seper-
ately, exploiting its corresponding depth map (Fig.6).
An intuitive approach for image projection is to
project each pixel in the reference image to the novel
viewpoint discretely. Pixels on the image plane are
back-projected to the world coordinate based on their
depth and the camera matrices, and then projected to
the novel viewpoint. A z-buffer is introduced to han-
dle the occlusions. Regions with no projected pixels
(a) Reference image I
1
(b) Projected image from I
1
(c) Reference image I
2
(d) Projected image from I
2
Figure 6: Projected images from different reference images.
will be marked as cracks and holes. Holes often ap-
pear near the occusions, while little cracks may ap-
pear everywhere.
In the final step of our method, all the projected
image are merged to form a final result. For each tar-
get pixel in the novel view, its source pixels will come
from different projected images. Their weights are
assigned according to the depth hints and reference
camera positions. In general, the projected images
whose camera position is closer to the novel view-
point in terms of spatial and angular proximity will be
given higher merging weight. The source pixels may
also come from different objects due to occlusions,
hence we increase the merging weight of the source
pixels with lower depth values. Besides, cracks and
holes in the projected image will share no merging
weight. After the merging step, the majority of holes
and cracks could be filled, and the remaining ones can
be further eliminated using median filtering.
4 EXPERIMENTAL RESULTS
We test our NVS method on several datasets from
(Chaurasia et al., 2013), including scenes with se-
vere occlusions and challenging objects. In order to
evaluate the effectiveness our method, we take one
image in each dataset as ground truth and synthesize
novel view at the same position. All the algorithms
are implemented on a laptop with Intel Core i5-7300
2.50GHz CPU. Note that in our method, all the steps
except image projection and merging run only once.
The time costs of all the steps for different datasets
and resolution are listed in Table1.
In Fig.7, our synthesizing results are compared to
the ground truth. Result images on University and
Museum2 datasets are shown in Fig.8 together with
corresponding ground truth. In Fig.9 we show the
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
198

Table 1: Running time for all the steps.
Dataset Resolution Step 1(s) Step 2(s) Step 3(s) Step 4(s)
Museum1 2256*1504 294 78 150 36
Museum1 1200*900 231 27 10 12
Museum2 2256*1504 363 87 103 35
University 1728*1152 168 46 15 19
depth map generated using different set of kd-tree pa-
rameters, and demonstrate their effect on the follow-
ing projection step.
Fig.7 illustrates that our method can produce plau-
sible result image for challenging scenes containing
vegetations and complex occlusions. However, neigh-
boring objects with similar color may have very dif-
ferent depth, e.g. white railing in foreground and
white window blind in background (lower right in
Fig.7(b)). This will lead to misalignment in the depth
synthesis step and result in distortions in the result im-
age. Since all the pixels are projected to novel view-
points discretely, our image projection and merging
step cannot ensure the completeness of image tex-
utres. The broken textures will appear as fragments
in result image (lower left in Fig.7(b)), and decrease
the image quality seriously.
k
1
and k
2
are the two parameters controlling the
distance function Eq.3 in triangle mesh, and they
stand for the weight of color and spatial proximity
respectively. As shown in Fig.9, smaller k
2
leads to
bulky depth map, and the object boundaries appear
irregular. As the value of k
2
increases, depth map be-
comes smoother or even be overfitted to the image
texture.
Fig.8 demonstrate that our method can render re-
gions with complex texture properly (e.g. words
on warning board in Fig.8(b) and the billboard in
Fig.8(d)). Objects involving severe occlusion (the
huge pillar in Fig.8(b)) can also be well rendered us-
ing a simple z-buffer. Besides, the black region on the
left edge of Fig.8(b) means that pixels in this area are
absent in all other reference images.
5 CONCLUSIONS
In this paper, we propose a novel method for syn-
thesizing novel views from a set of reference im-
ages taken in a casual manner. Our method has a
pre-processing stage consisting of 3D reconstruciton,
importance sampling and depth propagation steps to
generate pixel-dense depth maps for each reference
view, and a projection and merging step for rendering.
We show the efficiency and robusness of our method
on some challenging outdoor scenes containing vege-
tations and complex geometry.
The main limitaion of our method is the rendering
(a) Ground truth
(b) Result image
Figure 7: Novel view synthesis result comparison for Mu-
seum1 dataset.
speed. We will implement the image projection and
merging step on GPU for acceleration, and investigate
new rendering algorithms.
Our future work also includes making more use
of photo-consistency. Although the sparse point
cloud generated by MVS is supposed to be photo-
consistent, in some regions of our synthesized depth
maps, this desired property will be lost. We would
like to refine our depth maps by applying photo-
consistency, which will help revising the wrong depth
values.
Novel View Synthesis using Feature-preserving Depth Map Resampling
199

(a) Ground truth (b) Result image
(c) Ground truth (d) Result image
Figure 8: Result comparison for University (a)(b) and Mu-
seum2 (c)(d) dataset.
(a) Depth map 1 (b) Depth map 2
Figure 9: Depth maps generated using different kd-tree pa-
rameters. (a) the depth map with k
2
= 0.5 k
1
, (b) depth map
with k
2
= 10 k
1
.
ACKNOWLEDGEMENTS
This work was supported by National Natural Sci-
ence Foundation of China (NSFC) [grant number
61602012].
REFERENCES
Anguelov, D., Dulong, C., Filip, D., Frueh, C., Lafon,
S., Lyon, R., Ogale, A., Vincent, L., and Weaver, J.
(2010). Google street view: Capturing the world at
street level. Computer, 43(6):32–38.
Buehler, C., Bosse, M., Mcmillan, L., Gortler, S., and Co-
hen, M. (2001). Unstructured lumigraph rendering.
In Conference on Computer Graphics and Interactive
Techniques, pages 425–432.
Chaurasia, G., Duchene, S., Sorkine-Hornung, O., and
Drettakis, G. (2013). Depth synthesis and local warps
for plausible image-based navigation. Acm Transac-
tions on Graphics, 32(3):1–12.
Evers-Senne, J. F. and Koch, R. (2003). Image based inter-
active rendering with view dependent geometry. Com-
puter Graphics Forum, 22(3):573582.
Flynn, J., Neulander, I., Philbin, J., and Snavely, N. (2016).
Deep stereo: Learning to predict new views from the
world’s imagery. In Computer Vision and Pattern
Recognition, pages 5515–5524.
Furukawa, Y. and Ponce, J. (2010). Accurate, dense, and ro-
bust multiview stereopsis. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 32(8):1362–
1376.
Goesele, M., Ackermann, J., Fuhrmann, S., Haubold, C.,
Klowsky, R., Steedly, D., and Szeliski, R. (2010). Am-
bient point clouds for view interpolation. Acm Trans-
actions on Graphics, 29(4):1–6.
Hawe, S., Kleinsteuber, M., and Diepold, K. (2011).
Dense disparity maps from sparse disparity measure-
ments. In International Conference on Computer Vi-
sion, pages 2126–2133.
Hill, B., Roger, T., and Vorhagen, F. W. (1997). Compar-
ative analysis of the quantization of color spaces on
the basis of the cielab color-difference formula. Acm
Transactions on Graphics, 16(2):109–154.
Levoy, Marc, and Hanrahan (1996). Light field rendering.
Computer Graphics.
Lhuillier, M. and Quan, L. (2003). Image-based rendering
by joint view triangulation. IEEE Transactions on Cir-
cuits and Systems for Video Technology, 13(11):1051–
1063.
Mahajan, D., Huang, F. C., Matusik, W., Ramamoorthi, R.,
and Belhumeur, P. (2009). Moving gradients: a path-
based method for plausible image interpolation. In
ACM SIGGRAPH, page 42.
Ostromoukhov, V. (2001). A simple and efficient error-
diffusion algorithm. Proc Siggraph, pages 567–572.
Snavely, N., Seitz, S. M., and Szeliski, R. (2006). Photo
tourism: Exploring photo collections in 3d. Acm
Transactions on Graphics, 25(3):pgs. 835–846.
Stich, T., Linz, C., Wallraven, C., Cunningham, D., and
Magnor, M. (2008). Perception-motivated interpola-
tion of image sequences. pages 97–106.
Wu, C. (2013). Towards linear-time incremental structure
from motion. In International Conference on 3d Vi-
sion, pages 127–134.
Zhao, J., Feng, J., and Zhou, B. (2013). Image vectorization
using blue-noise sampling. Proceedings of SPIE - The
International Society for Optical Engineering, 8664.
Zhou, B. and Fang, X. (2003). Improving mid-tone qual-
ity of variable-coefficient error diffusion using thresh-
old modulation. Acm Transactions on Graphics,
22(3):437–444.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
200
