
Structural Change Detection by Direct 3D Model Comparison
Marco Fanfani and Carlo Colombo
Department of Information Engineering (DINFO), University of Florence, Via S. Marta 3, 50139, Florence, Italy
Keywords:
Change Detection, 3D Reconstruction, Structure from Motion.
Abstract:
Tracking the structural evolution of a site has important fields of application, ranging from documenting the
excavation progress during an archaeological campaign, to hydro-geological monitoring. In this paper, we
propose a simple yet effective method that exploits vision-based reconstructed 3D models of a time-changing
environment to automatically detect any geometric changes in it. Changes are localized by direct comparison
of time-separated 3D point clouds according to a majority voting scheme based on three criteria that compare
density, shape and distribution of 3D points. As a by-product, a 4D (space + time) map of the scene can also
be generated and visualized. Experimental results obtained with two distinct scenarios (object removal and
object displacement) provide both a qualitative and quantitative insight into method accuracy.
1 INTRODUCTION
Monitoring the evolution over time of a three-
dimensional environment can play a key role in se-
veral application fields. For example, during an
archaeological campaign it is often required to re-
cord the excavation progress on a regular basis. Si-
milarly, tracking of changes can be useful to con-
trast vandalism in a cultural heritage site, to prevent
natural damages and reduce hydro-geological risks,
and for building construction planning and manage-
ment (Mani et al., 2009).
A simple strategy to change tracking requires that
photos or videos of the scene are acquired and in-
spected regularly. However, a manual checking of
all the produced data would be time consuming and
prone to human errors. To solve this task in a fully
automatic way, 2D and 3D change detection methods
based on computer vision can be employed.
Vision-based change detection is a broad topic
that includes very different methods. They can be
distinguished by the used input data—pairs of ima-
ges, videos, image collections or 3D data—and by
their application scenarios, that can require different
levels of accuracy. In any case, all methods have
to consider some sort of registration to align the in-
put data before detecting the changes. Through the
years, several methods have been proposed (Radke
et al., 2005). The first approaches were based on
bi-dimensional data, and used to work with pairs of
images acquired at different times. In order to de-
tect actual scene changes, geometric (Brown, 1992)
and radiometric (Dai and Khorram, 1998; Toth et al.,
2000) registration of images were implemented to
avoid detection of unrelevant changes due to differen-
ces in point of view or lighting conditions. Video-
surveillance applications (Collins et al., 2000) were
also considered: In this case a video of a scene acqui-
red from a single point of view is available, and
change detection is obtained by modelling the back-
ground (Toyama et al., 1999; Cavallaro and Ebrahimi,
2001)—typically using mixture-of-Gaussian models.
Successively, solutions exploiting three-dimensional
information were introduced, in order to obtain bet-
ter geometric registration and mitigate problems rela-
ted to illumination changes. In (Pollard and Mundy,
2007), the authors try to learn a world model as a
3D voxel map by updating it continuously when new
images are available—a sort of background model-
ling in 3D. Then change detection is performed by
checking if the new image is congruent with the le-
arned model. However, camera poses are supposed
to be known and lighting conditions are kept almost
constant. Other methods exploit instead a 3D model
pre-computed from image collections (Taneja et al.,
2011; Palazzolo and Stachniss, 2017) or depth esti-
mates (Sakurada et al., 2013) of the scene so as to
detect structural changes in new images. After regis-
tering the new image sequence on the old 3D model—
using feature matching and camera resectioning (Ta-
neja et al., 2011; Sakurada et al., 2013) or exploiting
also GPS and inertial measurements (Palazzolo and
760
Fanfani, M. and Colombo, C.
Structural Change Detection by Direct 3D Model Comparison.
DOI: 10.5220/0007260607600767
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 760-767
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Stachniss, 2017)—change detection is obtained by re-
projecting a novel image onto the previous views by
exploiting the 3D model, so as to highlight possible
2D misalignments, indicating a change in 3D. Howe-
ver, these solutions find not only structural changes
but also changes due to moving objects (i.e. cars, pe-
destrians, etc.) that can appear in the new sequence:
in order to discard such nuisances, object recogni-
tion methods have been trained and used to select
changed areas to be discarded (Taneja et al., 2011).
In (Taneja et al., 2013), a similar solution is adop-
ted, using instead a cadastral 3D model and panora-
mic images. Differently, in (Qin and Gruen, 2014)
the reference 3D point cloud is obtained with an accu-
rate yet expensive laser scanning technology; chan-
ges are then detected in images captured at later ti-
mes by re-projection. Note that, in order to register
the laser-based point cloud with the images, control
points have to be selected manually. More recently,
even deep network have been used to tackle change
detection (Alcantarilla et al., 2016) using as input re-
gistered images from the old and new sequences.
Differently from the state-of-the-art, in this pa-
per we propose a simple yet effective solution ba-
sed on the analysis of 3D reconstructions computed
from image collections acquired at different times. In
this way, our method focuses on detecting structural
changes and avoids problem related to difference in
illumination, since it exploits only geometric infor-
mation from the scene. Moreover, 3D reconstruction
methods such as Structure from Motion (SfM) (Sze-
liski, 2010), Simultaneous Localization and Mapping
(SLAM) (Fanfani et al., 2013) or Visual Odome-
try (Fanfani et al., 2016) build 3D models of fixed
structures only, thus automatically discarding any mo-
ving elements in the scene. By detecting differences
in the 3D models, the system is able to produce an
output 3D map that outlines the changed areas. Our
change detection algorithm is fully automatic and is
composed by two main steps: (i) initially, a rigid re-
gistration at six degrees of freedom has to be esti-
mated in order to align the temporally ordered 3D
maps; (ii) then, the actual change detection is per-
formed by comparing the local 3D structures of cor-
responding areas. The detected changes can also be
transported onto the input photos/videos to highlight
the image areas with altered structures. It is worth
noting that our method is easy to implement and can
be sided with any SfM software—as for example Vi-
sualSFM (Wu, 2013) or COLMAP (Sch
¨
onberger and
Frahm, 2016), both freely available—to let even non
expert users build their own change detection system.
2 METHOD DESCRIPTION
Let I
0
and I
1
be two image collections of the same
scene acquired at different times t
0
and t
1
. At first, our
method exploits SfM approaches to obtain estimates
for the intrinsic and extrinsic camera parameters and
a sparse 3D point cloud representing the scene, for
both I
0
and I
1
. We also retain all the corresponden-
ces that link 2D points in the images with 3D points
in the model. Then, the initial point clouds is enri-
ched with region growing approaches (Furukawa and
Ponce, 2010) to obtain more dense 3D data. Note that
camera positions and both the sparse and dense mo-
dels obtained from I
0
and I
1
are expressed in two in-
dependent and arbitrary coordinate systems, since no
particular calibration is used to register the two col-
lections.
Hereafter we present the two main steps of the
change detection method: (i) to estimate the rigid
transformation that maps the model of I
0
onto that of
I
1
, implicitly exploiting the common and fixed struc-
tures in the area, (ii) to detect possible changes in the
scene by comparing the registered 3D models.
2.1 Photometric Rigid Registration
Since 3D models obtained through automatic re-
construction methods typically include wrongly es-
timated points, before using a global registration
approach—such as the Iterative Closest Point (ICP)
algorithm (Besl and McKay, 1992)—our system ex-
ploits the computed correspondences among image
(2D) and model (3D) points, to obtain an initial esti-
mate of the rigid transformation between the two 3D
reconstructions.
Once computed the sparse reconstructions S
0
and
S
1
, from I
0
and I
1
respectively, for each 3D point we
can retrieve a list of 2D projections and, additionally,
for each 2D projection a descriptor vector based on
the photometric appearance of its neighbourhood is
also recovered. Exploiting this information, we can
establish correspondences among images in I
0
and I
1
,
as follows. Each image in I
0
is compared against all
images in I
1
and putative matches are found using the
descriptor vectors previously computed. More in de-
tail, let f
i
0
= {m
i
0
, , m
i
N
} be the set of N 2D features
in image I
i
0
∈ I
0
that have an associated 3D point, and
f
j
1
= {m
j
0
, , m
j
M
} the set relative to I
j
1
∈ I
1
. For each
2D point in f
i
0
we compute its distance w.r.t. all points
in f
j
1
by comparing their associated descriptor vec-
tors. Then, starting from the minimum distance ma-
tch, every point in f
i
0
is put in correspondence with a
point in f
j
1
.
Structural Change Detection by Direct 3D Model Comparison
761
Since we know the relation between 2D and 3D
points in S
0
and S
1
, once obtained the matches bet-
ween the 2D point sets, we can promote these rela-
tionships to 3D: Suppose the point m
i
n
∈ f
i
0
is rela-
ted to the 3D vertex X
0
∈ S
0
, and similarly the point
m
j
m
∈ f
j
1
is related to the 3D vertex X
1
∈ S
1
, then if
m
i
n
matches m
j
m
, X
0
and X
1
can be put in correspon-
dence with each other. In this way, all the 2D matches
found can be transformed into correspondences of 3D
points.
3D correspondences obtained by comparing all
images in I
0
with every image in I
1
are accumulated
into a matrix Q. Since erroneous matches are possi-
ble, inconsistent correspondences could be present in
Q. To extract a consistent matching set
ˆ
Q, we count
the occurrences of a match in Q (note that, since a 3D
point can be the pre-image of several 2D points, by
comparing all images, we can find multiple occurren-
ces). Starting from the most frequent, a match is se-
lected and copied into
ˆ
Q, then all matches in Q that in-
clude points already present in
ˆ
Q are removed. Once
completed this analysis, and emptied Q,
ˆ
Q will de-
fine a consistent 3D matching set without repetitions
or ambiguous correspondences.
An initial rigid transformation between S
0
and S
1
is then computed using (Horn, 1987), by exploiting
the 3D matches in
ˆ
Q. Since wrong correspondences
could still be present in
ˆ
Q, we include a RANSAC fra-
mework by randomly selecting three correspondences
per iteration. Inliers and outliers are found by obser-
ving the cross re-projection error. For example, if
T
1,0
is a candidate transformation that maps S
1
onto
S
0
, the system evaluates re-projection errors between
the transformed 3D
˜
S
1
= T
1,0
(S
1
) and the 2D points
of the images in I
0
and vice-versa, using 3D points
from
˜
S
0
= T
−1
1,0
(S
0
) and 2D points from I
1
. The best
transformation T
∗
1,0
is estimated using the largest in-
lier set. Now, let D
0
and D
1
be the dense reconstructi-
ons obtained respectively from S
0
and S
1
using a re-
gion growing approach. As final step, our system runs
an ICP algorithm using as input D
0
and
˜
D
1
= T
∗
1,0
D
1
to refine the registration.
Note also that, once the registration is completed,
the 3D maps can be easily overlapped so as to visually
observe the environment evolution and produce a 4D
map (space + time).
2.2 Structural Change Detection
Once the 3D models are registered, surface normal
vectors are computed for both D
0
and D
1
: for each
vertex, a local plane is estimated using neighbouring
3D points, then the plane normal is associated to the
3D vertex.
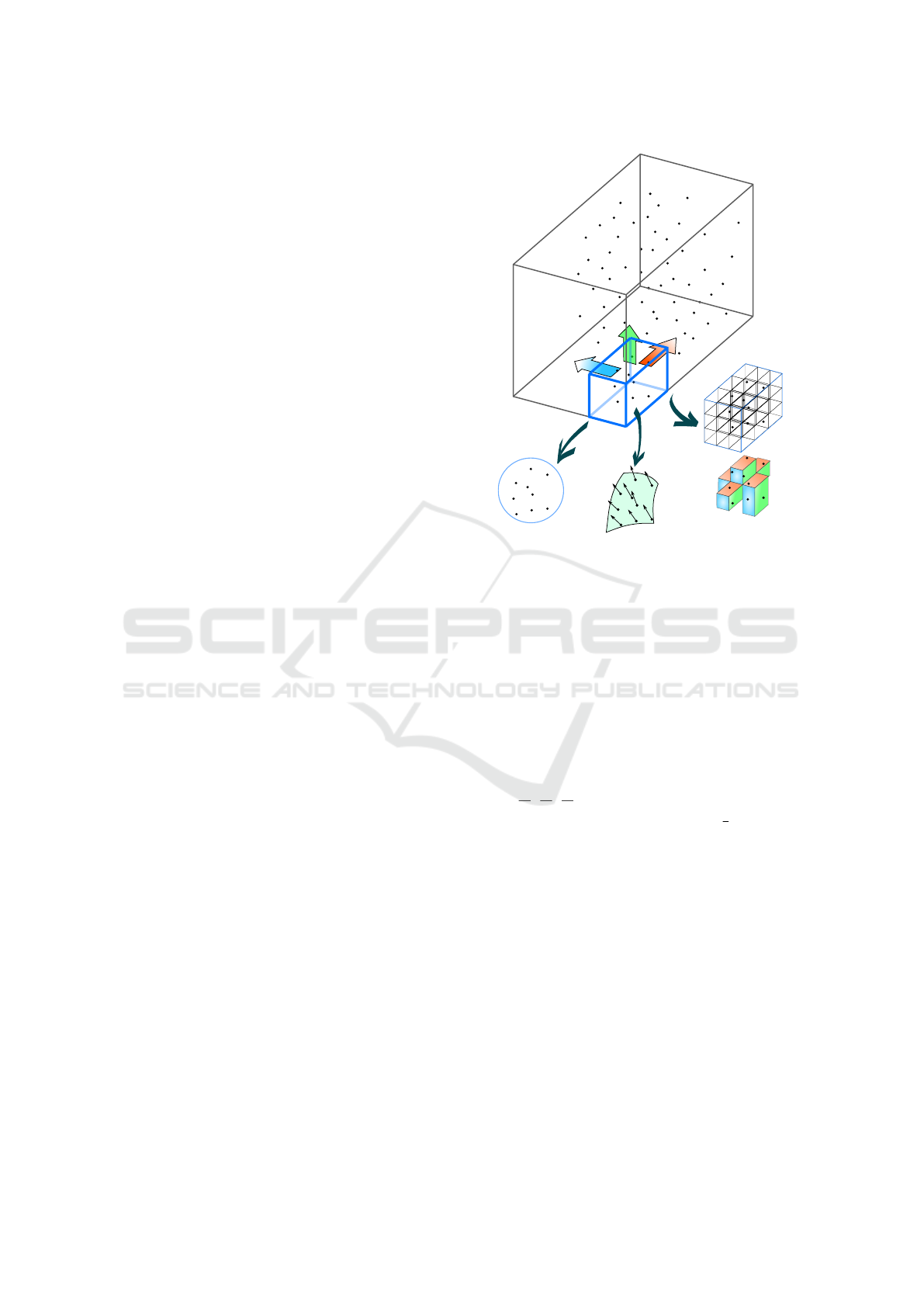
Quantity
Orientation
Occupancy
V
B
Figure 1: Graphical representation of our change detection
method. Top: the volume B and the voxel V that shifts
across the point cloud. Bottom: the three criteria used to
detect changes: Quantity, that takes into account the num-
ber of 3D points enclosed in V , Orientation, that is rela-
ted to the local 3D shape, and Occupancy,that describes the
spatial point distribution in V.
Change detection works by shifting a 3D box
over the whole space occupied by the densely recon-
structed model. A bounding volume B is created so
as to include all points in D
0
and D
1
, then a voxel V
is defined whose dimensions (V
x
, V
y
, V
z
) are respecti-
vely (
B
x
10
,
B
y
10
,
B
z
10
). V is progressively shifted to cover
the entire B volume with an overlap of
3
4
between ad-
jacent voxels. Corresponding voxels in D
0
and D
1
are
then compared by evaluating the enclosed 3D points
with three criteria named Quantity, Orientation and
Occupancy (see Fig. 1).
Quantity Criterion. The quantity criterion compa-
res the effective number of 3D points in V for D
0
and
D
1
. If their difference is greater than a threshold α,
the criterion is satisfied. Note that, even if counting
the 3D points easily provides hints about a possible
change, this evaluation can be misleading since D
0
and D
1
could have different densities—i.e. the same
area, without changes, can be reconstructed with finer
or rougher details, mostly depending on the number
and the resolution of the images used to build the 3D
model.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
762

Figure 2: The angles used to describe normal vector orien-
tation.
Orientation Criterion. To evaluate local shape si-
milarity, the normal vectors of points included in V ,
both for D
0
and D
1
, are used. For each normal n we
define its orientation by computing the angles θ
1
, be-
tween n and its projection n
0
onto the XY -plane, and
θ
2
, between n
0
and the X axis (see Fig. 2). Quantized
values of both θ
1
and θ
2
for all considered 3D points
are accumulated in a 2D histogram to obtain a des-
criptor of the surfaces enclosed in V, both for D
0
and
D
1
. These descriptors are then vectorized by concate-
nation of their columns, and the Euclidean distance
(spanning the dimensions of the histogram bins) is
employed to evaluate their similarity. If the distance
is greater than a threshold β, the orientation criterion
is satisfied. Note that the reliability of this criterion is
compromised if too few 3D points (and normal vec-
tors) are included in V ; hence, we consider this crite-
rion only if the number of 3D points in V is greater
than a threshold value µ for both D
0
and D
1
.
Occupancy Criterion. This last criterion is used to
evaluate the overall spatial distribution of points in V .
The voxel V is partitioned into 3
3
= 27 sub-voxels.
Each sub-voxel is labeled as “active” if at least one
3D point falls into it; again, for both D
0
and D
1
we construct this binary occupancy descriptor. If
more than γ sub-voxels have different labels, then the
occupancy criterion is satisfied.
If at least two out of these three criteria are satis-
fied, a token is given to all points enclosed in V, both
for D
0
and D
1
. Once V has been shifted so as to cover
the entire B volume, a 3D heat-map can be produced
by considering the number of tokens received by each
3D point in B, referred to as change score.
2.3 2D Change Map Construction
Since it could be difficult to appreciate the change de-
tection accuracy just by looking at the 3D heat-map
(examples of which are in Fig. 6), results will be pre-
sented in terms of a 2D change map. This is con-
structed by projecting the 3D points onto one of the
input images, and assigning a colour to each projected
point related to the local change score. Although bet-
ter than the heat-map, the 2D map thus obtained is
sparse and usually presents strong discontinuities (see
e.g. Fig. 8). This is mainly due to the use of a sparse
point cloud as 3D representation. Since any surface
information is missing, we cannot account for cor-
rect visibility of 3D points during the projection. As
a consequence, some points falling on scene objects
actually belong to the background plane.
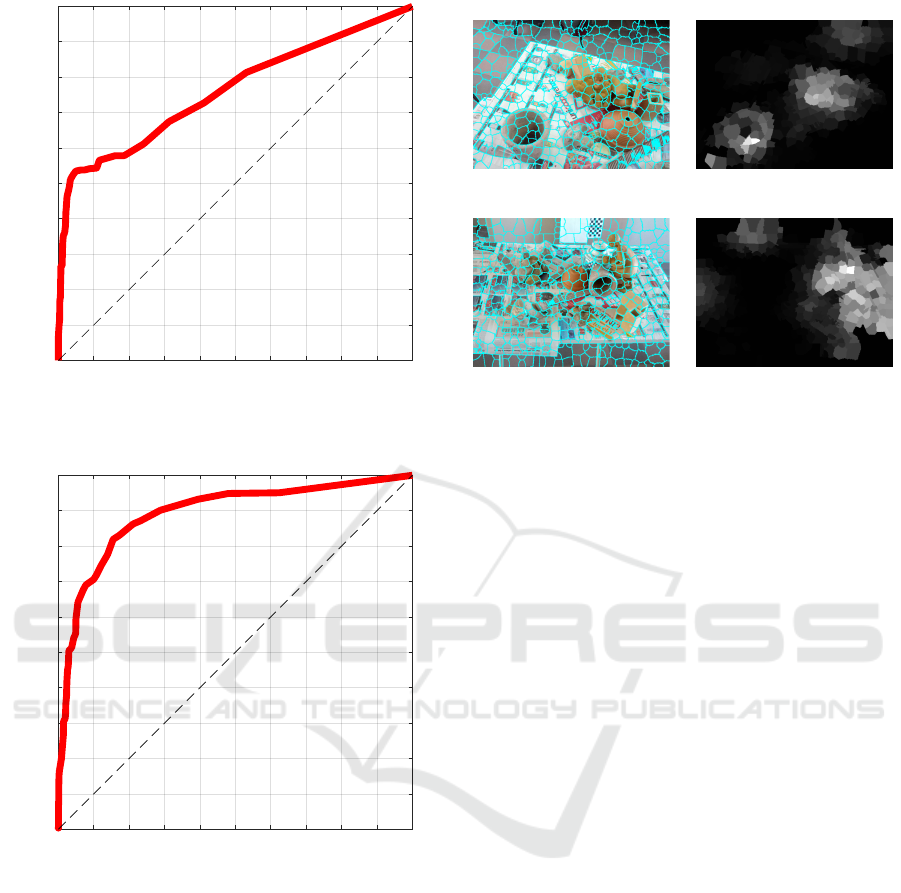
In order to improve the 2D map, we split the
input image into superpixels, using the SLIC met-
hod (Achanta et al., 2012) (see Fig. 10a and 10c) and
then, for each superpixel, we assign, to all the pixels
in it, the mean change score value of the 3D points
that project onto the superpixel. The resulting 2D
change maps is denser and smoother w.r.t. the pre-
vious one (see Fig. 10b and 10d).
3 EXPERIMENTAL EVALUATION
To evaluate the accuracy of the proposed method we
ran two different tests with datasets recorded in our
laboratory. In the first test (”Object removal”), we
built a scene simulating an archaeological site where
several artefacts are scattered over the ground plane
and we acquired a first collection of images I
0
. Then
we removed two objects (the statue and the jar) and
acquired a second collection I
1
(see Fig. 3).
For the second test (”Object insertion and displa-
cement”), using a similar scene with objects positi-
oned according to a different setup, we recorded the
collection I
2
. The original setup was then changed
by inserting two cylindrical cans on the left side, by
laying down the statue on the right side and by dis-
placing in a new position the jar, the rocks, and the
bricks. A new collection I
3
was then acquired (see
Fig. 4).
(a) (b)
Figure 3: Example frames of the two sequences. (a) I
0
se-
quence; (b) I
1
sequence. Note that the statue in the middle
and the jar in the top left corner have been removed.
Structural Change Detection by Direct 3D Model Comparison
763
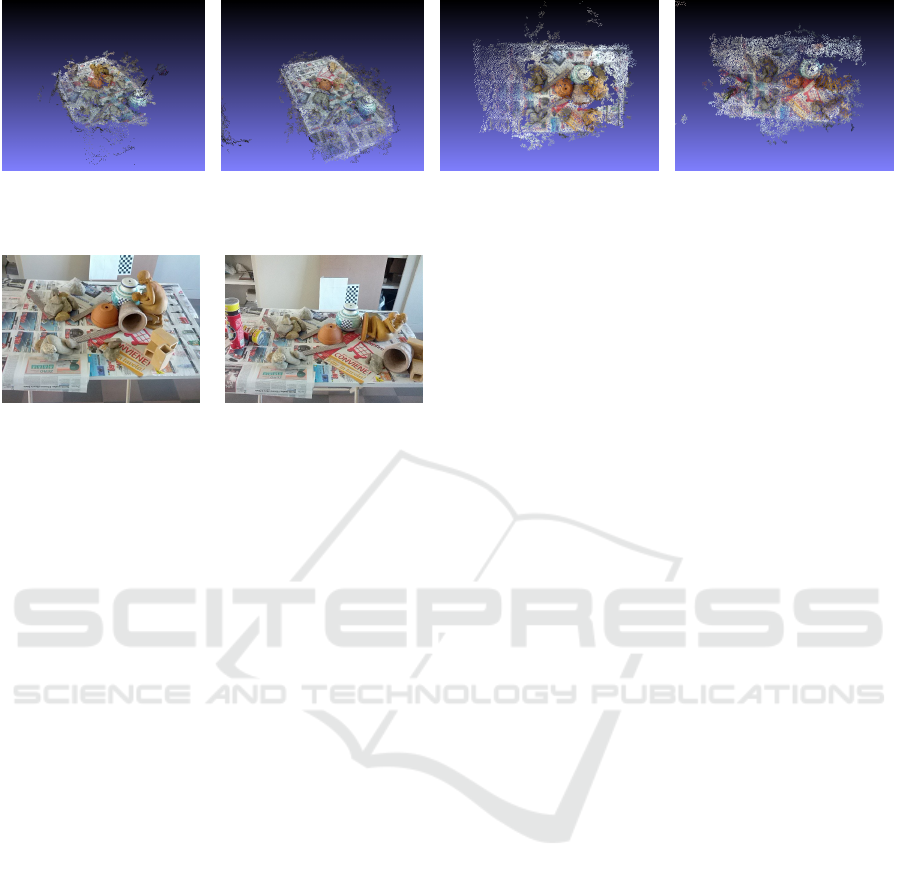
(a) (b) (c) (d)
Figure 5: Dense 3D reconstructions obtained respectively from (a) I
0
, (b) I
1
, (c) I
2
, and (d) I
3
.
(a) (b)
Figure 4: Frames from the sequences I
2
(a) and I
3
(b). Two
cylindrical cans were added in the left side, the statue on the
right was laid down, and the jar, the rocks, and the bricks
were moved to a different position.
All images were acquired with a consumer camera
with resolution 640x480; for I
0
and I
1
, 22 and 30 ima-
ges were recorded respectively, while I
2
and I
3
are
made of 22 and 18 images. Parameters were selected
experimentally as follows: α is equal to the average
number of points per voxel computed over D
0
and D
1
,
β = 0.5, γ = 10, and µ = 75.
3.1 Qualitative Results
Figure 5 shows the dense 3D models obtained with
SfM for the four image collections described before.
To visually appreciate the detected changes, in Fig. 6
we present the obtained 3D heat-maps for the first (I
0
vs I
1
) and the second (I
2
vs I
3
) test setups. Hotter areas
indicate a higher probability of occurred change.
As clear from the inspection of Fig. 6a, the remo-
ved jar and statue correspond to the hottest areas of
the heat-map for the ”Object removal” test. Similarly,
all the relevant objects of the ”Object insertion and
displacement” test are correctly outlined by red areas
in Fig. 6b. However, some false positives are present
in both the 3D heat-maps: This is probably due to
errors in the 3D reconstruction. Indeed, these false
positives appear mostly on peripheral areas of the re-
construction, related to background elements that are
under-represented in the image collection (the acqui-
sition was made circumnavigating the area of interest)
and thus reconstructed in 3D with less accuracy.
In order to better assess the performance of the
proposed method, and also to observe the impact of
the false positives visible in the heat-maps, we com-
plemented the above qualitative analysis with a quan-
titative one.
3.2 Quantitative Results
Ground-truth (GT) masks highlighting the changes
occurred between the two image sequences were ma-
nually constructed. Fig. 7 reports two example of GT
masks: Fig. 7b shows the changes between I
0
and I
1
,
reported in the reference system of I
0
, while Fig. 7d
depicts the comparison of I
2
and I
3
, in the coordinate
frame of I
2
.
The GT masks were used to evaluate the Receiver
Operating Characteristic (ROC) curve and assess the
performance of our method for both the tests at hand.
Fig. 8 shows the performance obtained with the
sparse 2D change maps. In Figure 9 ROC curves
obtained for I
0
vs I
1
and I
2
vs I
3
are reported. The
values of the Area Under the ROC Curve (AUC) are
respectively 0.76 and 0.89.
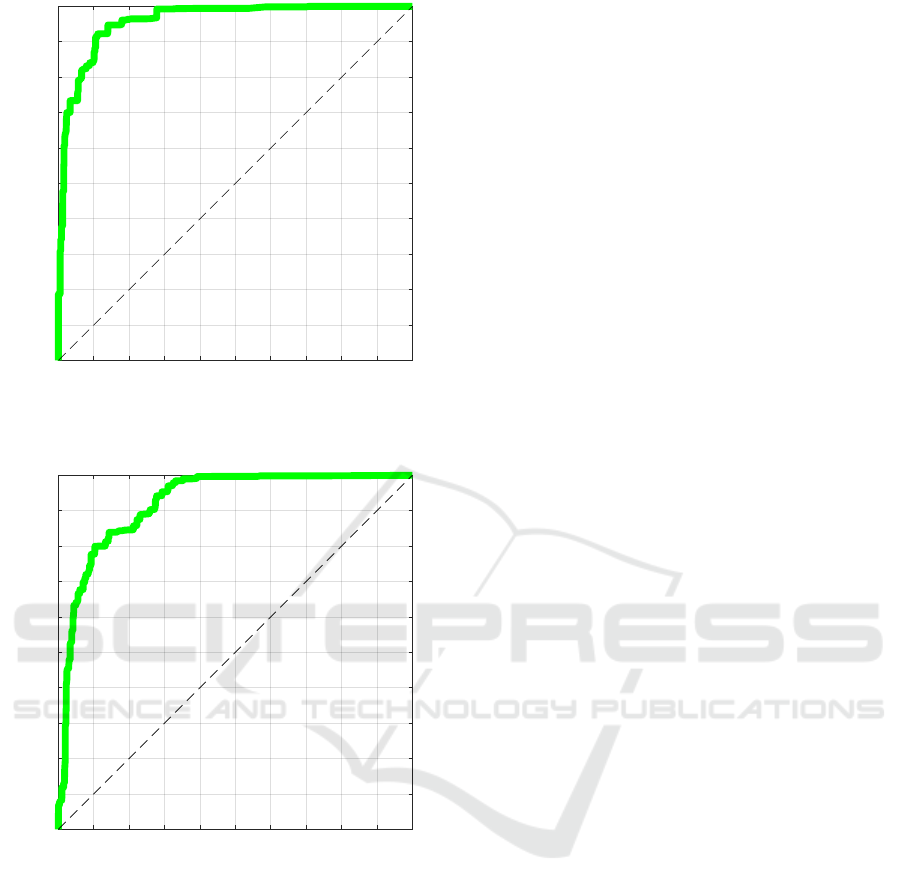
Improving the 2D change maps as described
in Sect. 2.3 by exploiting superpixel segmentation
(see Figs. 10a and 10c), yields denser and smoother
maps—see Figs. 10b and 10d. The corresponding
ROC curves are shown in Figs. 11a and 11b respecti-
vely. AUC values are 0.96 for I
0
vs I
1
, and 0.92 for I
2
vs I
3
. With the improved change maps, the AUC for
the ”Object insertion and displacement” test increases
only by 3%, while in the ”Object removal” test the
AUC increases by almost 20% (0.19). This is due to
the fact that the reconstructed 3D maps from I
2
and
I
3
are denser that those obtained from I
0
and I
1
(see
again Fig. 5). As a result, the sparse 2D change map
for the ”Object insertion and displacement” test is of
better quality than its homologous for the ”Object
removal” test. For completeness, we report in Table 1
True Positive (TP), False Positive (FP), True Negative
(TN), and False Negative (FN) values obtained at
the ROC cut-off point that maximizes the Younden’s
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
764

(a) (b)
Figure 6: Heat-maps obtained from (a) I
0
vs I
1
and (b) I
2
vs I
3
.
(a) (b)
(c) (d)
Figure 7: Example of ground-truth masks: (a) an image
from I
0
and (b) its GT mask, (c) an image from I
2
and (d)
its GT mask. It is worth noting that, while the GT mask
of I
0
vs I
1
is simply obtained by highlighting the removed
object only, in the mask for I
2
vs I
3
highlighted areas have to
account for removed, displaced or inserted objects. For this
reason, the GT map (d) was obtained by fusing the masks of
I
2
with those of I
3
—after having performed view alignment
based on the registered 3D models.
Index, i.e.
max{Sensitivity + Speci ficity − 1} =
max{T PR − FPR}
(1)
where TPR and FPR are the True Positive Rate and
the False Positive Rate, respectively.
(a) (b)
Figure 8: Sparse 2D change maps obtained by projecting
the computed 3D heat-map onto a reference frame of I
0
(a),
and I
2
(b).
Table 1: True Positive (TP), False Positive (FP), True Nega-
tive (TN), and False Negative (FN) percentage obtained at
the ROC cut-off point for each test sequence, plus the rela-
ted AUCs. The subscript
SPX
indicates the improved change
maps using superpixel segmentation.
Scene TP FP TN FN AUC
I
0
vsI
1
0.12 0.04 0.74 0.10 0.76
I
0
vsI
1
SPX
0.13 0.10 0.76 0.01 0.96
I
2
vsI
3
0.23 0.11 0.61 0.05 0.89
I
2
vsI
3
SPX
0.15 0.10 0.72 0.03 0.92
4 CONCLUSIONS AND FUTURE
WORK
In this paper, a vision-based change detection met-
hod based on three-dimensional scene comparison
was presented. Using as input two 3D reconstructions
of the same scene obtained from images acquired at
different times, the method estimates a 3D heat-map
that outlines the occurred changes. Detected chan-
ges are also highlighted into the image space using a
2D change map obtained from the 3D heat-map. The
Structural Change Detection by Direct 3D Model Comparison
765
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FPR
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
TPR
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FPR
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
TPR
(b)
Figure 9: ROC curves obtained from the sparse 2D change
map. In (a) ROC for I
0
vs I
1
achieving an AUC of 0.76. In
(b) ROC for I
2
vs I
3
achieving an AUC of 0.89.
method works in two steps. First, a rigid transfor-
mation to align the 3D reconstructions is estimated.
Then, change detection is evaluated by comparing lo-
cally corresponding areas. Three criteria are used to
assess the occurrence of a change: a quantity crite-
rion based on the number of 3D points, an orientation
criterion that exploits the normal vector orientations
to assess shape similarity, and an occupancy criterion
to evaluate the local spatial distribution of 3D points.
As a by-product, a 4D map (space plus time) of the
environment can be constructed by overlapping the
(a) (b)
(c) (d)
Figure 10: Superpixel segmentation examples and impro-
ved 2D change maps.
aligned 3D maps. Qualitative and quantitative results
obtained from tests on two complex datasets show the
effectiveness of the method, that achieves AUC values
higher than 0.90.
Future work will address a further improvement
of the 2D change map, based on the introduction of
surface (3D mesh) information into the computational
pipeline.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
Ssstrunk, S. (2012). Slic superpixels compared to
state-of-the-art superpixel methods. IEEE Transacti-
ons on Pattern Analysis and Machine Intelligence,
34(11):2274–2282.
Alcantarilla, P. F., Stent, S., Ros, G., Arroyo, R., and Gher-
ardi, R. (2016). Street-view change detection with de-
convolutional networks. In Proceedings of Robotics:
Science and Systems, AnnArbor, Michigan.
Besl, P. J. and McKay, N. D. (1992). A method for regis-
tration of 3-d shapes. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 14(2):239–256.
Brown, L. G. (1992). A survey of image registration techni-
ques. ACM Comput. Surv., 24(4):325–376.
Cavallaro, A. and Ebrahimi, T. (2001). Video object ex-
traction based on adaptive background and statistical
change detection. In Proc.SPIE Visual Communicati-
ons and Image Processing, pages 465–475.
Collins, R. T., Lipton, A. J., and Kanade, T. (2000). Intro-
duction to the special section on video surveillance.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 22(8):745–746.
Dai, X. and Khorram, S. (1998). The effects of image misre-
gistration on the accuracy of remotely sensed change
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
766
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FPR
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
TPR
(a)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
FPR
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
TPR
(b)
Figure 11: ROC curves obtained from the improved 2D
change maps. In (a) ROC for I
0
vs I
1
achieving an AUC
of 0.96. In (b) ROC for I
2
vs I
3
achieving an AUC of 0.92.
detection. IEEE Transactions on Geoscience and Re-
mote Sensing, 36(5):1566–1577.
Fanfani, M., Bellavia, F., and Colombo, C. (2016). Accurate
keyframe selection and keypoint tracking for robust
visual odometry. Machine Vision and Applications,
27(6):833–844.
Fanfani, M., Bellavia, F., Pazzaglia, F., and Colombo, C.
(2013). Samslam: Simulated annealing monocular
slam. In International Conference on Computer Ana-
lysis of Images and Patterns, pages 515–522. Sprin-
ger.
Furukawa, Y. and Ponce, J. (2010). Accurate, dense, and ro-
bust multiview stereopsis. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 32(8):1362–
1376.
Horn, B. K. P. (1987). Closed-form solution of absolute
orientation using unit quaternions. Journal of the Op-
tical Society of America A, 4(4):629–642.
Mani, G. F., Feniosky, P. M., and Savarese, S. (2009). D
4
AR
– A 4-dimensional augmented reality model for au-
tomating construction progress monitoring data col-
lection, processing and communication. Electronic
Journal of Information Technology in Construction,
14:129 – 153.
Palazzolo, E. and Stachniss, C. (2017). Change detection
in 3D models based on camera images. In 9th Works-
hop on Planning, Perception and Navigation for In-
telligent Vehicles at the IEEE/RSJ Int. Conf. on Intel-
ligent Robots and Systems (IROS).
Pollard, T. and Mundy, J. L. (2007). Change detection in
a 3-d world. In 2007 IEEE Conference on Computer
Vision and Pattern Recognition, pages 1–6.
Qin, R. and Gruen, A. (2014). 3D change detection at street
level using mobile laser scanning point clouds and ter-
restrial images. ISPRS Journal of Photogrammetry
and Remote Sensing, 90:23 – 35.
Radke, R. J., Andra, S., Al-Kofahi, O., and Roysam, B.
(2005). Image change detection algorithms: a sys-
tematic survey. IEEE Transactions on Image Proces-
sing, 14(3):294–307.
Sakurada, K., Okatani, T., and Deguchi, K. (2013). De-
tecting changes in 3D structure of a scene from multi-
view images captured by a vehicle-mounted camera.
In Computer Vision and Pattern Recognition (CVPR),
2013 IEEE Conference on, pages 137–144. IEEE.
Sch
¨
onberger, J. L. and Frahm, J.-M. (2016). Structure-
from-motion revisited. In Conference on Com-
puter Vision and Pattern Recognition (CVPR).
https://colmap.github.io/.
Szeliski, R. (2010). Computer Vision: Algorithms and
Applications. Springer-Verlag New York, Inc., New
York, NY, USA, 1st edition.
Taneja, A., Ballan, L., and Pollefeys, M. (2011). Image
based detection of geometric changes in urban envi-
ronments. In 2011 International Conference on Com-
puter Vision, pages 2336–2343.
Taneja, A., Ballan, L., and Pollefeys, M. (2013). City-scale
change detection in cadastral 3D models using ima-
ges. In 2013 IEEE Conference on Computer Vision
and Pattern Recognition, pages 113–120.
Toth, D., Aach, T., and Metzler, V. (2000). Illumination-
invariant change detection. In 4th IEEE Southwest
Symposium on Image Analysis and Interpretation, pa-
ges 3–7.
Toyama, K., Krumm, J., Brumitt, B., and Meyers, B.
(1999). Wallflower: principles and practice of back-
ground maintenance. In Proceedings of the Seventh
IEEE International Conference on Computer Vision,
volume 1, pages 255–261 vol.1.
Wu, C. (2013). Towards linear-time incremental struc-
ture from motion. In 2013 International Confe-
rence on 3D Vision - 3DV 2013, pages 127–134.
http://ccwu.me/vsfm/.
Structural Change Detection by Direct 3D Model Comparison
767
