
Bootstrapping Vector Fields
Paula Ceccon Ribeiro and H
´
elio Lopes
Pontif
´
ıcia Universidade Cat
´
olica do Rio de Janeiro, Departamento de Inform
´
atica, Rio de Janeiro, Brazil
Keywords:
Vector Field, Uncertainty Quantification, Helmholtz-Hodge Decomposition, Bootstrapping.
Abstract:
Vector fields play an essential role in a large range of scientific applications. They are commonly generated
through computer simulations. Such simulations may be a costly process since they usually require high
computational time. When researchers want to quantify the uncertainty in such kind of applications, usually
an ensemble of vector fields realizations are generated, making the process much more expensive. In this
work, we propose the use of the Bootstrap technique jointly with the Helmholtz-Hodge Decomposition as
a tool for stochastic generation of vector fields. Results show that this technique is capable of generating a
variety of realizations that can be used to quantify the uncertainty in applications that use vector fields as an
input.
1 INTRODUCTION
It is recognized in the literature that the task of model-
ing a physical spatial/temporal phenomenon is a very
important for decision making applications (Beccali
et al., 2003). When you have to deal specifically on
the natural phenonema forecasting, it is mandatory to
represent uncertainty (Mariethoz and Caers, 2014).
Several physical phenomena models that consider
uncertainty have two categories: 1) deterministic
models, which generates physically-based simulated
outcomes; 2) stochastic models, which provides re-
alizations that somehow cover the uncertainty space
and at the same time mimic the physics (providing a
certain level of realism) (Mariethoz and Caers, 2014).
The main objective of this paper is to present a
new stochastic method to generate 2D vector fields,
since they are very important in a variety set of de-
cision making problems related to Scientific Comput-
ing. Applications that make use of vector fields in-
clude, for example: fluid flow simulation (Anderson
and Wendt, 1995), analysis of MRI data for medical
prognosis (Tong et al., 2003) and weather prediction
(Luo et al., 2012), just to cite a few. The deterministic
simulation of vector fields in such applications may
require expensive numerical computations (Anderson
and Wendt, 1995). The stochastic generation of phys-
ically realistic vector fields realizations is a challeng-
ing task. Many algorithms for multivariate stochas-
tic simulation are based on very complex probabilistic
models (Popescu et al., 1998; Xiu, 2009; Lall et al.,
2016) and generally they are not adequate to mimic
physical phenomena such as wind, for example.
In this work, we propose an algorithm to stochas-
tically simulate vector field realizations based on a
given gridded 2D vector field V, which will from
now on be called the training data. Such algo-
rithm is based on the Helmholtz-Hodge Decompo-
sition (HHD) (Bhatia et al., 2013) and on the non-
parametric Bootstrap method (Efron, 1979). The pro-
posed algorithm aims to physically mimic V and ap-
propriately cover the space of uncertainty. More pre-
cisely, our algorithm first use the HHD of V to ob-
tain its rotational-free and divergence-free potentials
components. With such potentials in hand, we per-
form a bootstrap-like approach to generate R other re-
alizations of these potentials and differentiate them.
Finally, we add the generated components to the
original harmonic component to generate R vector
field realizations. Through Multi-Dimension Scaling
(MDS), we could verify that our results were capable
to provide some variability. To exemplify its use, we
apply our algorithm to the uncertainty quantification
introduced by the use of the curl and the divergence
finite-difference differential operators.
Paper Outline. The remainder of this paper is or-
ganized as follows: Section 2 presents some previous
and related work. Section 3 and 4 describes the Boot-
strap method and the Helmholtz-Hodge Decomposi-
tion, in that other. Section 6 presents an analyses of
the method’s capabilities, whilst Section 7 shows an
application of the technique, followed by the perfor-
Ribeiro, P. and Lopes, H.
Bootstrapping Vector Fields.
DOI: 10.5220/0007248900190030
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 19-30
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
19

mance results in Section 8. Finally, Section 9 presents
our conclusion as well as some final remarks and fu-
ture studies.
2 RELATED WORK
This section has the objective to discuss the related
work about the three main concepts used in this work:
stochastic simulation, Helmholtz-Hodge Decomposi-
tion and the Bootstrap method.
Stochastic Simulation. As mentioned in the previ-
ous section, the stochastic generation of physically
realistic vector fields realizations is a challenging
task. In one side, many algorithms based on proba-
bilistic models for multivariate stochastic simulation
(Popescu et al., 1998; Xiu, 2009; Lall et al., 2016)
are very complex mathematically speaking and gen-
erally they are not adequate to mimic physical phe-
nomena such as wind, for example. In the other side,
there are several geostatistical methods in the litera-
ture dedicated to the stochastic simulation of spatial
physical phenomena (Lantu
´
ejoul, 2013). Generally,
they are applied to the generation of univariate con-
tinuous or categorical functions defined on a 2D or
3D grid. They usually propose a parametric model
of uncertainty to formulate the lack of knowledge,
and models based on variogram are the most tradi-
tional ones (Oliver and Webster, 2014). Alternatively,
non-parametric approaches, such as the ones based on
Multiple-Point Statistics (MPS), have received a lot of
investigation in the last five years. These approaches
generate realizations of a spatial phenomenon based
on a training image, which implicitly describes the
phenomenon’s construction process (Mariethoz and
Caers, 2014). These methods have a very strong
connection with computer graphics’ texture synthe-
sis techniques (Mariethoz and Lefebvre, 2014), like
Image Quilting (Efros and Freeman, 2001), for exam-
ple. Similarly to MPS methods, this work proposes a
new non-parametric method for the stochastic genera-
tion of 2D vector-fields that is also based on a training
data. However, this new method uses the bootstrap
technique instead of the MPS.
Helmholtz-Hodge Decomposition. A wide range
of the applications of the Helmholtz-Hodge Decom-
position can be found in the literature. These include
the use of the HHD to detect singularities for finger-
print matching (Gao et al., 2010), its application in the
field of complex ocean flow visualization and anal-
ysis for feature extraction (Wang and Deng, 2014),
cardiac video analysis (Guo et al., 2006), hurricane
eye tracking (Palit, 2005) and the aerodynamic design
of cars and aircrafts (Tong et al., 2003). Recently,
Ribeiro and Lopes (Ribeiro et al., 2016) proposed the
use of the HHD as a tool to analyze 2D vector field
ensembles. This work will use the HHD to decom-
pose the training data in order to obtain the rotational-
free and the divergent-free potentials. With these two
scalar fields in hands a bootstrap-based perturbation is
performed and the resulted fields are then differenti-
ated to construct a vector field realization by summing
their perturbed components. Perturbing the scalar po-
tentials independently is fundamental to achieve the
objective of providing a certain level of realism of the
generated vector fields.
Bootstrap. The Bootstrap method is a statistical
method based on resampling with replacement. It is
commonly applied to measure the accuracy of statis-
tical estimators (Efron, 1979). In general, such accu-
racy could be defined in terms of bias, variance, confi-
dence intervals, prediction error or some other disper-
sion measure. This technique has been applied to vi-
sual computing problems, such as: performance eval-
uation for computer vision systems (Cho et al., 1997),
searching for radial basis function parameter (Liew
et al., 2016), evaluation of the influence of hidden
information on supervised learning problems (Wang
et al., 2014) and edge detection (Fu et al., 2012),
among others. This technique has in also very impor-
tant in this paper. Not only because it performs the
perturbation of the potential fields, but also because it
is adopted to quantify the algorithm uncertainty intro-
duced by the use of the curl and the divergence finite-
difference differential operators.
3 THE BOOTSTRAP METHOD
The Bootstrap method is based on the notion of a
bootstrap sample (Efron, 1979; Wasserman, 2004).
To better understand it, let
ˆ
F be an empirical distribu-
tion, with probability 1/n on each of the n observed
values x
i
, with i ∈ {1,2,··· ,n}. Then, a bootstrap
sample is defined as a random sample of size n drawn
from
ˆ
F with replacement, say x
∗
= (x
∗
1
,x
∗
2
,··· , x
∗
n
) .
The star notation indicates that x
∗
is not the actual
data set x, but a randomized, or resampled, version of
x. For more details about this technique, see (Wasser-
man, 2004).
With this concept in mind, assume that
T
n
= g(x
1
,x
2
,···x
n
) is a statistic of the data set
{x
1
,··· , x
n
}. To compute the variance of T
n
, denoted
by V
F
(T
n
), it would be necessary to know the
distribution F of the data. Often, however, this
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
20

is unknown. The Bootstrap technique estimates
V
F
(T
n
) by the use of stochastic simulations, where
the unknown distribution F is approximated by a
distribution named
ˆ
F. Then, an approximation of
V
F
(T
n
) is computed as V
ˆ
F
(T
n
). Generating B boot-
strap samples, it is now possible to approximate the
distribution of T
n
by evaluating T
∗
n
= g(x
∗
1
,··· , x
∗
n
).
Using this distribution, we can finally compute the
variance V
ˆ
F
(T
n
) according to the following formula:
V
ˆ
F
(T
n
) =
1
B
B
∑
i=1
T
∗
i
−
1
B
B
∑
b=1
T
∗
n,b
!
2
, (1)
where T
∗
i
, i = 1,.. .,B, represents the statistics com-
puted at the i
th
bootstrap sample.
4 HELMHOLTZ-HODGE
DECOMPOSITION
The Helmholtz-Hodge Decomposition (Chorin and
Marsden, 1993) states that a square-integrable vector
field V can be formulated as the sum of three orthog-
onal components:
V = ∇ϕ + ∇ ×ψ + h, (2)
where ∇ϕ is the rotational-free term (∇ ×∇ϕ = 0),
∇ ×ψ is the divergence-free term (∇ ·(∇ ×ψ) = 0)
and h is the harmonic term (∇×h = 0 and ∇ ·h = 0).
Figure 1 shows an example.
The scalar field ϕ is called the potential field of
the curl-free term.
The curl of a 2D vector field V is defined by
∇ ×V = ∇ ×(V
1
,V
2
) =
∂V
2
∂x
−
∂V
1
∂y
,
Thus, one can write ∇ ×V as (∇ ·J)V, where J is
an operator that rotates a vector by
π
2
in a clockwise
direction: J(x,y) = (y, −x).
As a consequence, Equation 2 can be rewritten for
a 2D vector field (Polthier and Preuß, 2003) as:
V = ∇ϕ + J(∇ψ) + h, (3)
where ψ is a scalar field that will be called the poten-
tial field of the divergent-free component.
To obtain the HHD of a given 2D vector field V
means to determine the scalar functions ϕ and ψ and
the harmonic function h that satisfies Equation 3. This
leads to the following system of equations:
∇ ·V = ∆ϕ
(∇ ·J)V = −∆ψ
, (4)
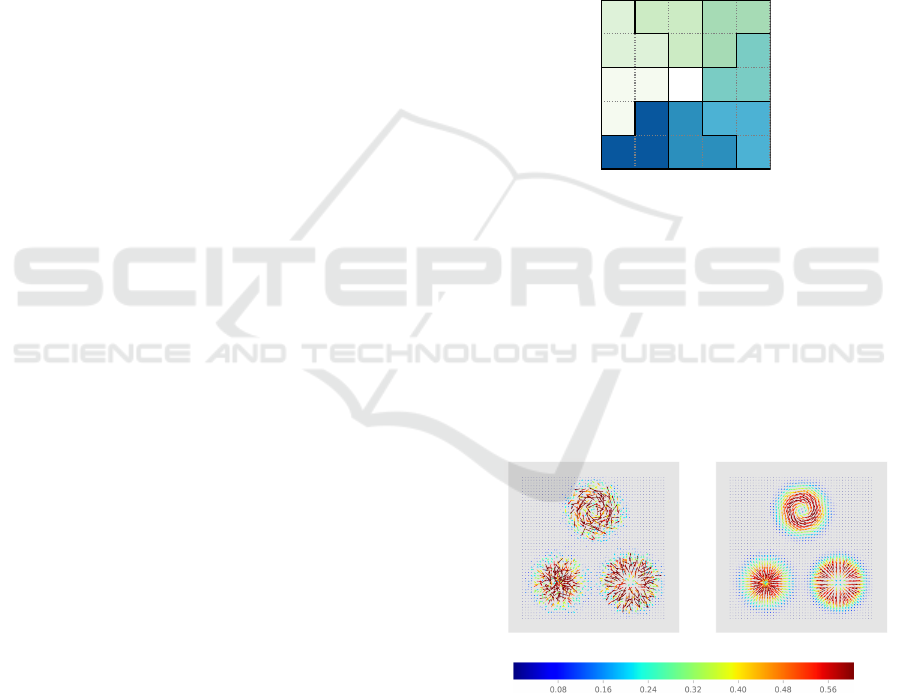
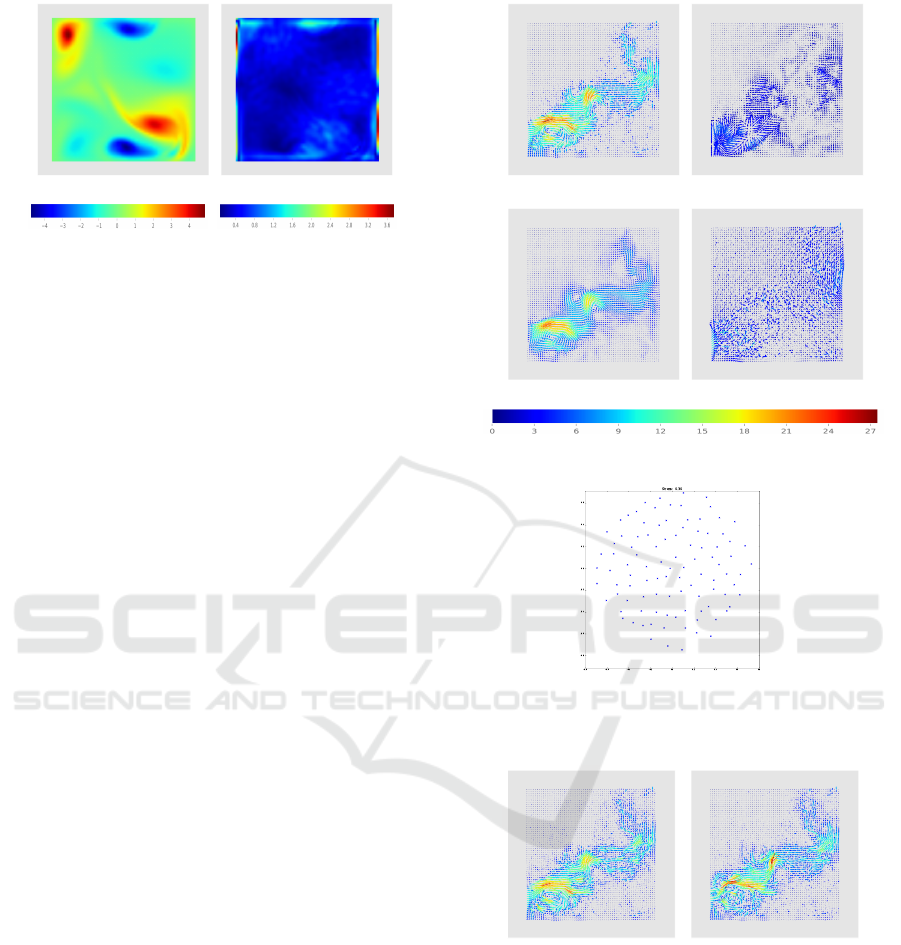
(a) Vector Field (b) Rotational-free term
(c) Divergence-free term (d) Harmonic term
Figure 1: The HHD states that a vector field (a) is com-
posed of a rotational-free (b), a divergence-free (c), and a
harmonic component (d). The color bar represents the vec-
tor magnitudes.
where ∆ is the the Laplacian operator.
An important fact is that the HHD is unique for
vector fields vanishing at infinity on unbounded do-
mains (Pascucci et al., 2014). However, to obtain
an unique solution for closed domains, some bound-
ary conditions should be established. The normal-
parallel (NP) boundary condition is the most com-
monly used, which requires the divergence-free and
the rotational-free components to be parallel and nor-
mal to the boundary, respectively:
∇ϕ ×n = 0
(∇ ·J)ψ ·n = 0
, (5)
where n represents the outward normal to the bound-
ary. Another possible boundary condition is to impose
constant potentials on the boundary, which implies
the rotational-free component normal to the boundary
and the divergence-free tangent to it (Petronetto et al.,
2010). However, these two types of boundary condi-
tions may introduce artifacts that were not observed in
the original field due to the imposed dependency be-
tween the vector field components and the shape and
orientation of the boundary. To overcome this prob-
lem, Pascucci et al. (Pascucci et al., 2014) proposed
the Natural HHD (NHHD), which decomposes V by
separating the components by its influences, which
can be internal or external. Its formulation is written
as follows:
V = ∇ϕ
∗
+ (∇ ·J)ψ
∗
+ h
∗
where, ∇ϕ
∗
is the natural divergence and (∇ ·J)ψ
∗
Bootstrapping Vector Fields
21
is the natural rotational. They represent the compo-
nents influenced by the divergence and rotational of
V inside the domain. Moreover h
∗
is the natural har-
monic, which is influenced only by the exterior of the
domain.
In this work, we adopted the NHHD method to
obtain the rotational-free, divergence-free and har-
monic natural components of a given 2D vector field
V. More details for how to obtain this decomposition
can be found in the original work of (Pascucci et al.,
2014).
5 PROPOSED METHOD
This section presents a new stochastic method to gen-
erate 2D vector field realizations from a given train-
ing data, i.e. a gridded 2D vector field. This ap-
proach is based on the Bootstrap technique and uses
the Helmholtz-Hodge Decomposition to consistently
generate stochastic realizations of vector fields.
Consider a discrete sampling of a two-
dimensional domain on a Cartesian grid structure
S
m,n
= {x
i, j
∈ R
2
: 1 ≤ i ≤ m, 1 ≤ j ≤ n}. Also,
suppose that a discrete 2D vector field V is given,
i.e., to each spatial point in S
m,n
there is a 2D vector
associated. This 2D vector field V is the training
data.
The main goal of this method is to randomly gen-
erate vector fields that have similar characteristics of
the training one, i.e., that are structural perturbations
of the original vector field.
Overview. The first step in our method is to compute
the NHHD of the training data V. So, at each point
x
i, j
∈ S
m,n
we have the following equality:
V
∗
(x
i, j
) = ∇ϕ
∗
(x
i, j
)+(∇ ·J)ψ
∗
(x
i, j
)+h
∗
(x
i, j
). (6)
With the NHHD components of the given train-
ing data V in hand, we stochastically generate other
R 2D vector fields based on V. To obtain each real-
ization, we firstly perturb the divergence-free ϕ
∗
and
rotational-free ψ
∗
scalar potentials around b points
x
i, j
∈ S
m,n
using a Bootstrap-like technique. From
these perturbed scalar potentials, we then compute
the corresponding rotational-free and divergent-free
terms from their partial derivatives. We add these two
terms to the original harmonic term h
∗
in order to fi-
nally create a vector field realization.
The number b of blocks in which to perform the
Bootstrap is defined through a Poisson Distribution
(Wasserman, 2004) with rate λ. This rate represents
the mean number of blocks that are going to be per-
turbed. The greater the λ the higher the variability
induced in the samples.
Given that we are dealing with vector fields, we
adopted an strategy to preserve their structure during
the resampling step. Such strategy is based on a ker-
nel proposed by (Fu et al., 2012) and depicted in Fig-
ure 2. This kernel explores the directional coherence
of the contours that pass through the central pixel.
As can be seen, the kernel divides a n ×n block in
8 subgroups. When performing the Bootstrap-based
technique, each of these regions is resampled with
replacement separately to obtain a Bootstrap sample
around the central pixel. The size of the kernel pre-
sented in Figure 2 is 5 ×5. The bigger the mask, the
higher the variation of the Bootstrap samples in rela-
tion to the input sample.
X
1
2
3
4
5
6
7
8
Figure 2: A kernel that divides a n ×n block of the domain
into 8 subgroups in order to preserve the vector field orien-
tation after resampling with replacement the pixels in each
subgroup separately.
Once again, taking as a realization the vector field
depicted in Figure 1, one can perceive, through Fig-
ure 3, that the adopted kernel is capable of preserving
the orientation of the vector field used as input for
the Bootstrap method. More than that, in regions in
which the potentials are practically constant, no noise
is added to the vector samples.
(a) Example of a single sample (b) Mean of 100 samples
Figure 3: Example of vector fields obtained using a kernel
divided in regions to preserve the vector field orientation.
The color scale matches the one presented in Figure 1 for
comparison purposes.
With this knowledge, we can now specify that, in
this work, λ is defined as a percentage of the training
data size divided by the kernel size.
At last, a smoothing step is performed through a
Gaussian Filter (Gonzalez and Woods, 2006), which
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
22

standard deviation (σ) can be parameterized, for both
x and y dimensions.
The Algorithm. We implemented the proposed
method according to the pseudocode described in Al-
gorithm 1. This pseudocode generates a stochastic
realization R
∗
based on the NHHD components of a
training data V.
The method has as input the following list of vari-
ables:
• the scalar potentials ϕ
∗
, ψ
∗
and the vector field h
∗
obtained by the NHHD of the training data V;
• the kernel K of size l ×l used to perform the re-
sampling with replacement on the potentials;
• the number b of blocks in which we will perform
the Bootstrap.
Algorithm 1: Generation of a realization R
∗
based on the
NHHD components of a training 2D vector field V.
input : ϕ
∗
, ψ
∗
, h
∗
, K, b
output: R
∗
, a vector field realization
1 ϕ
∗
boot
← ϕ
∗
;
2 φ
∗
boot
← φ
∗
;
3 x ← randInt(1, m, b);
4 y ← randInt(1, n, b);
5 for k ← 1 to b do
6 i ← x[b] ;
7 j ← y[b] ;
8 boot indices ← local bootstrap(K);
9 ϕ
∗
boot
(i, j) ←
ˆ
Fϕ(boot indices);
10 ψ
∗
boot
(i, j) ←
ˆ
Fψ(boot indices);
11 end
12 ϕ
∗
boot
← smooth(ϕ
∗
boot
);
13 ψ
∗
boot
← smooth(ψ
∗
boot
);
14 ∇ϕ
∗
R
← divergent(ϕ
∗
boot
);
15 ∇ ×ψ
∗
R
← curl(ψ
∗
boot
);
16 R
∗
(x
i, j
) ← ∇ϕ
∗
R
(x
i, j
) + ∇ ×ψ
∗
R
(x
i, j
) + h
∗
;
The input b defines the number of indexes that
will be generated through an Uniform Distribution
(Wasserman, 2004) (lines 3 and 4). These indexes
represent central positions of regions in the scalar po-
tentials of V that are going to be perturbed using a
Bootstrap-like approach.
Then, for each one of the b indexes pairs, say x
i, j
,
we perform a local bootstrap (line 8) centered on x
i, j
based on the input kernel K, which results in a new
organization of the l ×l region around x
i, j
. In other
words, the region around x
i, j
will be perturbed and
new values will be assigned to ?
∗
boot
(i, j).
In the following, we perform a smoothing step on
?
∗
boot
, i.e., we obtain a smoothed version of
ˆ
F
?
. The
smoothing step is required because a small change in
the potentials can lead to a significant change in the
vector field, once this is obtained deriving these po-
tentials. In this work, we used σ equal to 2 pixels in
the smoothing step.
After these steps, we can now derive the new
scalar potentials to obtain new realizations for the
divergence-free (line 14) and rotational-free (line 15)
components of V. Finally, a new vector field realiza-
tion is obtained summing these components with the
original harmonic component of V (line 16), follow-
ing Equation 2.
Repeating this procedure R times, we will then
have a set of R realizations of vector fields obtained
through the original NHHD components of V.
6 RESULTS AND DISCUSSION
To verify the results that the proposed method can
achieve, we make use of a 2D vector field ensem-
ble comprehended by seven multi-method wind fore-
cast realizations E , provided by the Brazilian Instituto
Nacional de Pesquisas Espaciais (INPE). Each real-
ization in E represent a possible wind forecast for a
region delimited by 35
◦
48
0
S and 83
◦
W as the mini-
mum latitude and longitude coordinates (DMS), re-
spectively, and by 6
◦
12
0
N and 25
◦
48
0
W as the max-
imum latitude and longitude coordinates, in that or-
der. The data is defined over a Cartesian grid structure
with dimension of 144 ×106.
As a first step, we apply the NHHD on each
realization R in E to derive its divergence-free,
rotational-free and harmonic components. Through
this decomposition, we obtain the potentials of the
rotational-free and divergence-free components. With
those potentials in hand, we can then derive the
rotational-free, divergence-free and harmonic compo-
nents as stated in Equation 2. For each realization R
in E , we apply Algorithm 1 to obtain 100 other new
realizations.
Similarity Measure and MDS Projection. To pro-
vide a way of visually encode the similarity between
the vector fields, we make use of the MDS (Kruskal,
1964) technique for dimensionality reduction to visu-
alize high-dimensional data in a 2-dimensional space.
The MDS method aims to provide insight in the un-
derlying structure and relations between patterns by
providing a geometrical representation of their sim-
ilarities (Honarkhah and Caers, 2010). Mathemat-
ically speaking, MDS translates a dissimilarity ma-
Bootstrapping Vector Fields
23
trix into a configuration of points in a n-D Euclidean
space.
For two vector fields A and B, we adopted the fol-
lowing similarity measure, known as the Cosine Sim-
ilarity:
similarity
A,B
= cos θ =
A ·B
kAk·kBk
(7)
Such a measure states how related two vector
fields are given their angles. For similar vectors the
similarity coefficient will be close to 1, for opposite
vectors, such coefficient will be close to −1. For un-
related vectors, on the other hand, this coefficient will
be around 0.
To take into account both the magnitude and ori-
entation of the vector fields A and B in the cosine sim-
ilarity computation, we perform the following trans-
formation.
Firstly, for a vector V of dimensions m×n, we un-
roll it from a 2-dimensional vector to a 1-dimensional
vector. Then, we generate a new vector V
∗
= (v
∗
x
,v
∗
y
)
based on V such as:
v
∗
x
= atan2(v
y
,v
x
)
v
∗
y
= kVk
V
∗
= (v
x
,v
y
)
For an ensemble E , after this step, we have a new
set E
∗
in hand. All vectors in E
∗
are normalized as
follows:
v
∗
x
=
v
∗
x
π/2
v
∗
y
=
v
∗
y
max(v
∗
y
∈ E
∗
)
After this transformation, we apply the similarity
measure for each pair of realizations in E
∗
.
Figure 4 presents the MDS for the wind fore-
cast ensemble and its mean vector, after applying the
transformation described before.
Figure 4: MDS visualization for the original ensemble E .
Colors represent each realization in E . The black square
represent the mean vector of E .
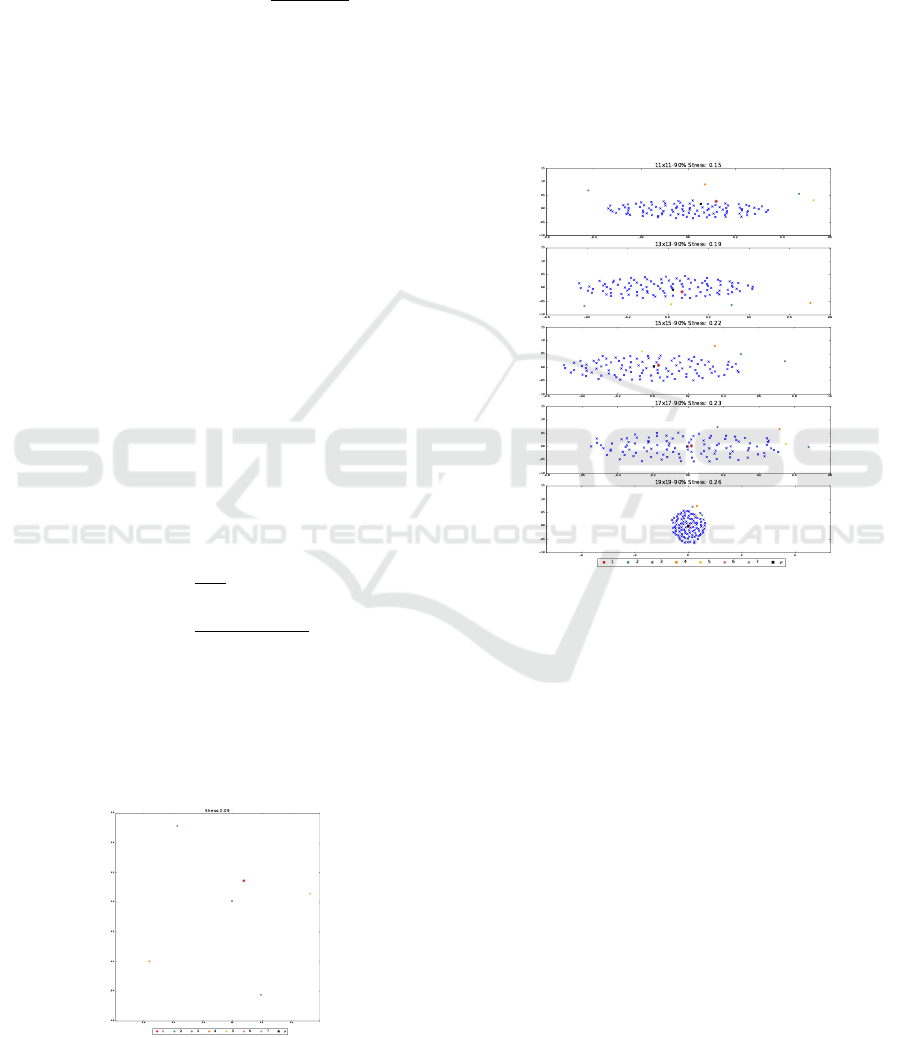
Coverage Test. It is relevant to verify whether we
can generate a set of realizations that covers the given
ensemble set or not. This might state if, from a sin-
gle realization, it is possible to obtain certain scenar-
ios that could be derived through another simulation
process (possible more costly). To do this, we first
tried different values for the λ parameter given differ-
ent bootstrap kernel sizes to generate 100 new sam-
ples from the mean vector field µ. They ranged from
30% to 90% and from 5 ×5 to 17 ×17, respectively.
We achieved the best coverage using a λ value of
90% and a kernel size of 19 ×19, as can be seen in
Figure 5.
Figure 5: MDS visualization between E and a new ensam-
ble generated through the mean of E , represented as a black
square.
Given that, Figure 6 present the MDS for each
vector field in the original set E and a new set of re-
alizations derived from it using a kernel size and λ
as specified before. Markers of same color belongs
to the same set, i.e, were generated based on a com-
mon realization. Circle markers represent each re-
alization of the set E . Cross markers represent new
realizations, and square markers show both the clos-
est and farthest simulation given a base realization –
Table 4 depict these simulations for each realization
in E . Through this image, we can see that, for each
realization s ∈ (1,··· ,7), the resulting set of realiza-
tions present some variability in relation to the origi-
nal vector field used as base for the stochastic simula-
tion method.
Putting all these simulations together, we have the
result presented in Figure 7. From this image, we can
notice that the original set E is completely surrounded
by the new realizations.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
24
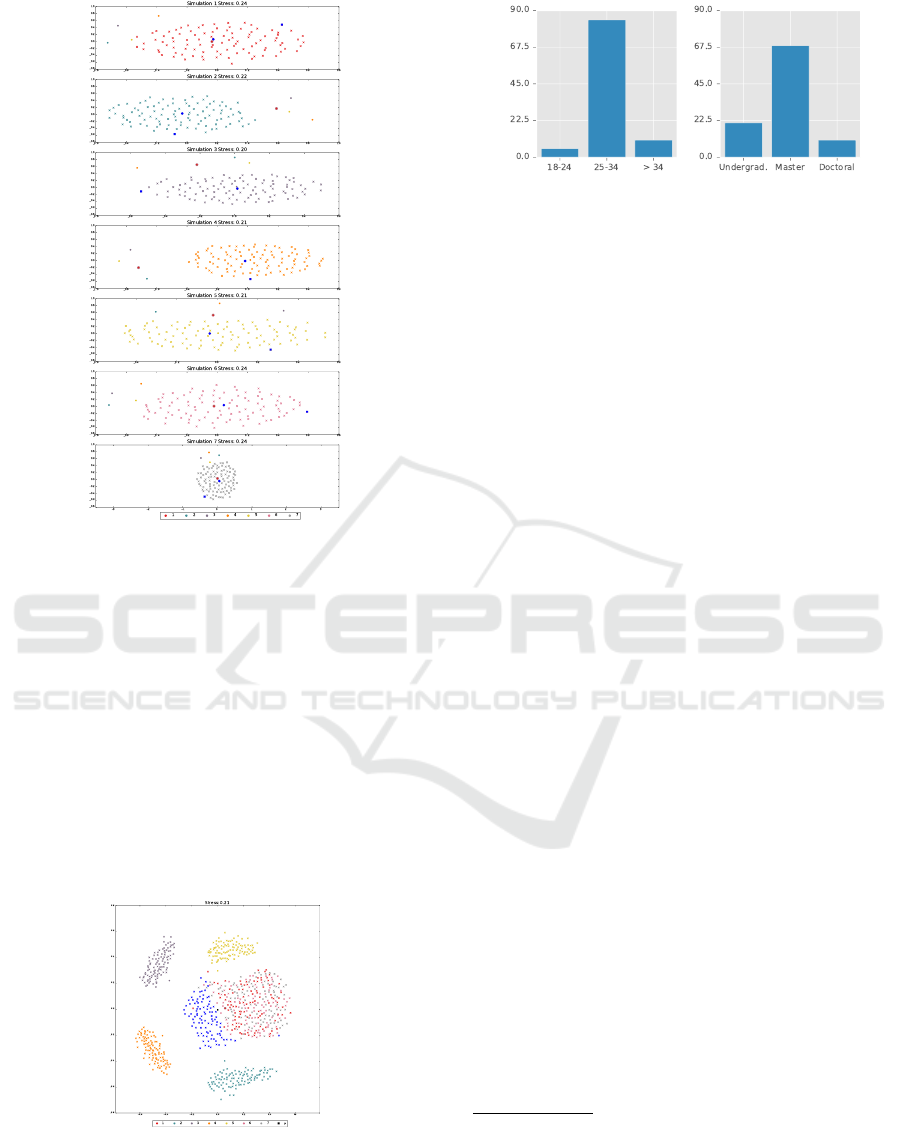
Figure 6: MDS visualization between each set of new real-
izations and the original ensemble E . Colors represent each
realization of the set E . Circular markers represent each re-
alization in E . Cross markers represent, for each V in E , the
new realizations derived from V, both presenting the same
color.
Evaluation. Willing to evaluate the quality of the
results achieved with the proposed method, we con-
ducted an informal study with 19 people with a var-
ied age range as well as educational level (Figure 8).
Here, we define quality as the capacity of a generated
realization be as realistic as the input data set (1) and
unique in comparison with its members (2).
To evaluate (1) we displayed 4 vector fields (2 of
Figure 7: MDS visualization between each new realization
and the original ensemble E . Colors represent each realiza-
tion of the set E . Circular markers represent each realiza-
tion in E. Cross markers represent new realizations derived
from the original one (presented with a circular marker of
the same color).
(a) Age (b) Level of Education
Figure 8: Summary of the 19 participants of our informal
study.
them from the wind forecast data set – members 1 and
5
1
– and the other 2 generated through the proposed
method – realizations 4f and 7c) and asked the par-
ticipants to classify them as training or stochastically
generated or choose the option I don’t know. Most
of the participants got the right answer, however, for
a close call. For instance, training data 5 was cor-
rectly classified by 57.9% of the participants, while
21.1% classified it as stochastically generated and the
remaining couldn’t tell the difference. The same re-
sult was observed for the stochastically generated vec-
tor field 7c. On average, 60.55% of the participants
chose the correct answer, 21% chose the wrong an-
swer and 18.45% didn’t know how to classify it.
For the evaluation of (2) we presented two sets of
vector fields. The first one contained 3 members of
the wind forecast data set (members 1, 2 and 3). The
second one was composed by 3 vector fields (realiza-
tions 1c, 2c and 3c) generated using the first set mem-
bers. We then asked the participants to indicate, for
each member of the second set, which vector field in
the first one was used to generate it, or the option I
don’t know. For all vector fields in the second set, the
majority of the participants did not identify the cor-
rect training vector field. The percentage that did it
was 10.5%, 21.1% and 10.5%, for each vector field
in the second set. For the first vector field in this
set, 1c, 31.1% of the participants couldn’t chose the
most similar vector field from the original data set.
For the second and third vector fields, this percentage
was 21.1%. Realization 3c was characterized as al-
most similar to two different vector fields (31.6% for
3 and 36.8% for 1), being considered more similar to
a vector field different from its training one.
These results show that, despite being possible to
identify the tested vector fields as training or stochas-
1
For all data used in this test and here presented, read
Table 4 as:
1. member x: x-th vector field in column Realization;
2. xc: x-th vector field in column Closest Simulation;
3. xf: x-th vector field in column Farthest Simulation.
Bootstrapping Vector Fields
25
tically generated, our method was capable to generate
realizations that mimics the physical simulation.
7 APPLICATIONS
As mentioned before, the presented approach may be
useful in a varied range of applications. In this sec-
tion, we present a quantification approach to the algo-
rithm uncertainty related to different scenarios of the
curl and divergence discrete differential operators.
Navier-Stokes. Consider the vector field presented
in Figure 9. This field is defined over a grid of
64×64, with its minimum and maximum as 0.007812
and 0.992188, respectively, in the x and y directions.
This field is the result of a Navier-Stokes simulation
(Chorin, 1968), which aims to describe the motion
of viscous fluid flows. Such kind of simulation can
be used to model a varied set of physics phenomena,
ranging from waves simulation (Abadiea et al., 2010)
to image and video inpainting (Bertalmio et al., 2001).
As can be seen, the divergence-free component de-
fines such field (we may consider the rotational-free
and harmonic components as noise).
(a) Vector Field (b) Rotational-free
(c) Divergence-free (d) Harmonic
Figure 9: Navier-Stokes simulation and its NHHD compo-
nents.
After generating 100 new realizations through the
procedure presented in Algorithm 1, using a kernel
of 5 ×5, we have a set of realizations E . Figure 10
shows the MDS for this set. As can be seen, the orig-
inal sample is surrounded by the new ones.
Figure 10: MDS visualization between each new realization
and the original realization. Samples generated using a 5×5
kernel.
(a) Closest Simulation (b) Farthest Simulation
Figure 11: Closest and farthest simulation of the Navier-
Stokes vector field.
Figure 11 shows the closest and farthest simula-
tion derived from the original vector field. They are
represented using the same magnitude scale as the
original field (Figure 9).
With this set in hand, it is now possible to quan-
tify the uncertainty related to the curl operator, which
is obtained using partial derivatives. In other words,
we can measure the uncertainty related to the kernel
used to obtain such attribute. To do so, for each new
realization R ∈E , we obtain the curl of R. We do the
same for the original sample V. To derive the uncer-
tainty of the curl operator, we then compute its mean
squared error (RMSE).
In statistics, the mean squared error, MSE, of an
estimator is a way to measure the difference between
values implied by an estimator and the true values of
its target parameter (Wackerly et al., 2008).
For instance, being
ˆ
T the curl of V and T
∗
i
, i =
1,.. .,100 the curl of each one of the generated sam-
ples, the MSE of the predictor
ˆ
T is defined as:
MSE(
ˆ
T) =
1
100
100
∑
i=1
(
ˆ
T −T
∗
i
)
2
(8)
The RMSE is given as the square root of the MSE,
i.e., RMSE =
√
MSE.
Figure 12 presents the RMSE of the curl given the
generated realizations.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
26
(a) Curl of V (b) RMSE of the curl
Figure 12: Curl of V (a) and RMSE of the curl operator (b)
between the set E and the realization V.
Particle-Image Velocimetry. Often, PIV applica-
tions aims to study the behavior of turbulent flows, an-
alyzing the stability of features such as vortices. Be-
sides providing means to perform this kind of study
through the generation of different realizations, we
can go further with the new samples generated using
the proposed technique.
The following PIV simulation is defined over a
grid of 124 ×126. Its horizontal dimension ranges
from 0.3824 to 47.4176. On the other hand, its verti-
cal dimension ranges from 0.3824 to 48.1824. Figure
13 shows this vector field, as well as its NHHD com-
ponents. This image corresponds to a velocity field of
a gas flow that is continuously injected horizontally
on the bottom left corner and that flows on the domain
from left to right until it meets a wall (image’s right
edge). It is possible to observe that the divergence-
free component seems to have a high magnitude and
basically dominate the flow behavior; we can also no-
tice that the rotational-free component present some
features that characterize it.
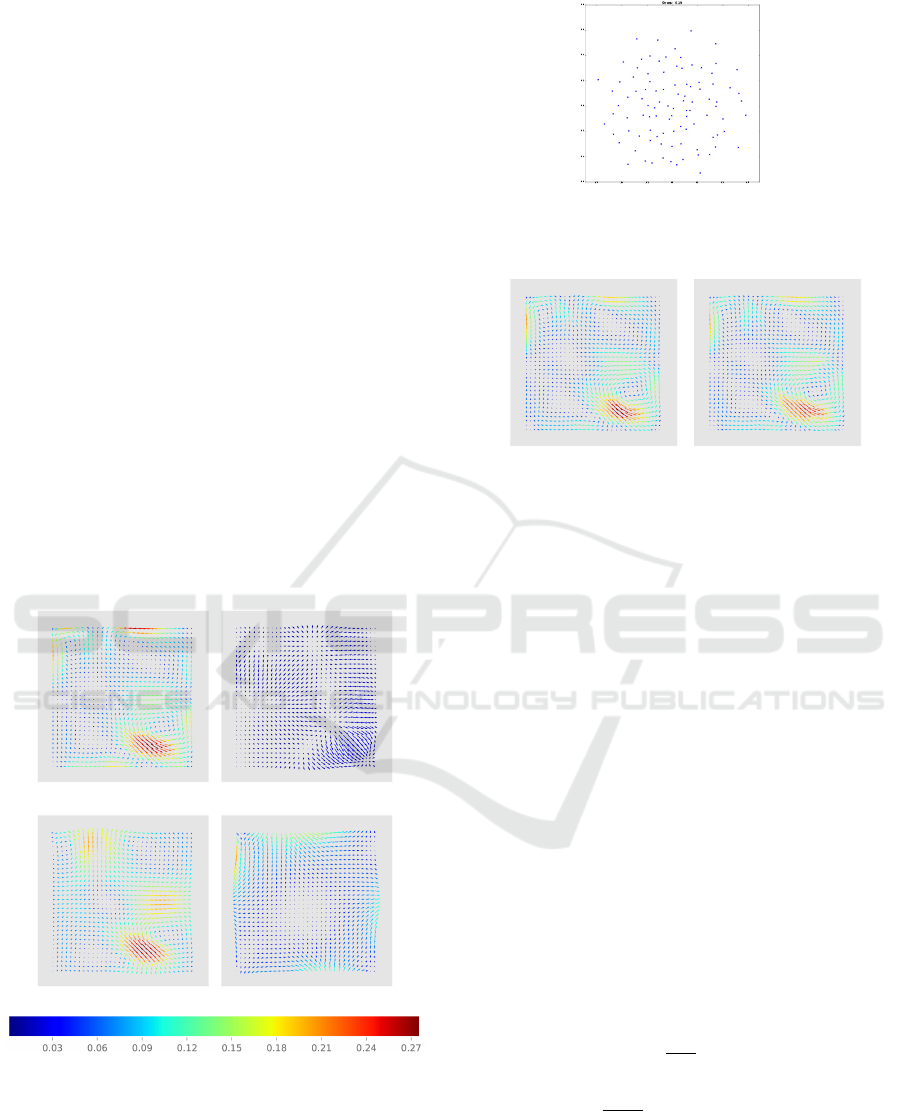
Figure 14 presents the MDS between the new re-
alizations (generated using a kernel of size 19 ×19)
and the original one. Once again, the training data is
surrounded by the generated realizations.
Figure 15 shows the closest and farthest simula-
tion derived from the original vector field. They are
represented using the same magnitude scale as their
original field (Figure 13).
From Figure 16, we can see that, for the curl oper-
ator, the RMSE is higher on regions with high magni-
tude. In such areas, the scalar field also present high
values. So, a small change in these regions are capa-
ble of generating a great change in the vector field.The
same behavior happens with the divergence operator,
i.e., we have a higher uncertainty in areas where the
magnitude of the vector field is also higher.
(a) Vector Field (b) Rotational-free
(c) Divergence-free (d) Harmonic
Figure 13: PIV simulation and its NHHD components.
Figure 14: MDS visualization between each new realization
and the original realization. Samples generated using a 19×
19 kernel.
(a) Closest Simulation (b) Farthest Simulation
Figure 15: Closest and farthest simulation of the Navier-
Stokes vector field.
8 PERFORMANCE
Here we present the performance of the proposed
technique. Tests were performed using a machine
running ubuntu 16.04 LTS with the configuration pre-
sented in Table 1.
For each data set presented in this paper, we mea-
sured the time necessary to compute the NHHD and
to generate new realizations (as the mean of the time
Bootstrapping Vector Fields
27

(a) Curl of V (b) RMSE of the curl
Figure 16: Curl of V (a) and RMSE of the curl operator (b)
between the set E and the realization V.
(a) Divergence of V (b) RMSE of the divergence
Figure 17: Divergence of V (a) and RMSE of the divergence
operator (b) between the set E and the realization V.
Table 1: Machine configuration.
Memory 62.8 GiB
Processor Intel
R
Core
TM
i7-5820K CPU @ 3.30 GHz ×12
Graphics GeForce GTX 960/PCle/SSE2
OS Type 64 bit
Disk 55 GB
spent to generate a set with 100 new samples). Those
can be seen in Table 2. It is important to notice that
all methods here presented, as well as the time mea-
surement, were coded in Python 2.7, using the Numpy
numerical library and the SciPy library of scientific
tools.
Table 2: Performance of the proposed method per sample,
in seconds. Tested using λ equal to 90% for all scenarios
and a kernel of 15 ×15.
Forecast
2
Navier-Stokes
3
PIV
4
NHHD 1025.775 86.497 1200.545
Samples Gen. 0.584 0.209 0.992
As can be seen, the NHHD is the most time con-
suming step. For more details on the performance of
the NHHD, see (Pascucci et al., 2014).
We also tested the effect of different kernel sizes
on the samples generation step. This is shown in Ta-
2
19 ×19 kernel.
3
5 ×5 kernel.
4
19 ×19 kernel.
ble 3. As we can observe, the size of the kernel didn’t
cause a significant change in the algorithm perfor-
mance. It is also interesting to note that, the bigger
the size of the kernel the lesser the time consump-
tion. This means that the bootstrap step performance
is mostly affected by the number of blocks chosen,
instead of the size of the chosen kernel.
Table 3: Performance of the sample generation step for dif-
ferent kernel sizes. Tested with the wind forecast ensemble
mean and λ equal to 90%.
11 ×11 13 ×13 15 ×15 17 ×17
0.613 0.612 0.580 0.577
9 CONCLUSION
This paper proposed a technique to stochastic simu-
late vector fields given a single realization. Thanks
to the Helmholtz-Hodge Decomposition method we
could develop a method that provides a good level
of realistic scenarios. To the best of our knowledge,
this is the first approach that uses the Helmholtz-
Hodge Decomposition to stochastic generate vector
fields given a training data. Results were evaluated us-
ing a set of multi-method wind forecast realizations,
as well as simulations from Navier-Stokes and PIV.
For each data, 100 new scenarios were generated us-
ing the presented method. We applied the MDS tech-
nique to proper visualize the results; we could ob-
serve that the simulated scenarios were able to pro-
vide a great variability and that they mimic the train-
ing data. The applicability of this approach ranges
from uncertainty quantification to data assimilation
(Kalnay, 2003). Further studies includes expanding
this method for 3-dimensional vector fields, as well
as exploring other techniques for random vector field
synthesis.
ACKNOWLEDGEMENTS
We would like to thank CAPES and CNPq for the
financial support of this research. Additionally, we
would like to thank INPE and Haroldo Fraga de Cam-
pos Velho for the wind forecast data models used in
this work.
REFERENCES
Abadiea, S., Morichona, D., Grillib, S., and Glockner, S.
(2010). Numerical simulation of waves generated by
landslides using a multiple-fluid NavierStokes model.
Coastal Engineering, 57(9):779–794.
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
28

Anderson, J. D. and Wendt, J. (1995). Computational fluid
dynamics, volume 206. Springer.
Beccali, M., Cellura, M., and Mistretta, M. (2003).
Decision-making in energy planning. application of
the electre method at regional level for the diffusion
of renewable energy technology. Renewable Energy,
28(13):2063–2087.
Bertalmio, M., Bertozzi, A. L., and Sapiro, G. (2001).
Navier-stokes, fluid dynamics, and image and video
inpainting. In Proceedings of the 2001 IEEE Com-
puter Society Conference, pages 355–362. IEEE.
Bhatia, H., Norgard, G., Pascucci, V., and Bremer, P.
(2013). The Helmholtz-Hodge Decomposition - A
Survey. IEEE Transactions on Visualization and Com-
puter Graphics, 19(8):1386–1404.
Cho, K., Meer, P., and Cabrera, J. (1997). Perfor-
mance assessment through bootstrap. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
19(11):1185–1198.
Chorin, A. J. (1968). Numerical solution of the Navier-
Stokes equations. Mathematics of Computation,
22:745–762.
Chorin, A. J. and Marsden, J. E. (1993). A mathematical in-
troduction to fluid mechanics. Texts in Applied Math-
ematics. Springer-Verlag, 3rd edition.
Efron, B. (1979). Bootstrap Methods: Another Look at the
Jackknife. Annals of Statistics, 7:1–26.
Efros, A. A. and Freeman, W. T. (2001). Image quilting
for texture synthesis and transfer. In Proceedings of
the 28th annual conference on Computer graphics and
interactive techniques, pages 341–346. ACM.
Fu, X., You, H., and Fu, K. (2012). A Statistical Approach
to Detect Edges in SAR Images Based on Square Suc-
cessive Difference of Averages. IEEE Geoscience And
Remote Sensing Letters, 9(6):1094–1098.
Gao, H., Mandal, M. K., Guo, G., and Wan, J. (2010). Sin-
gular point detection using Discrete Hodge Helmholtz
Decomposition in fingerprint images. In ICASSP’10,
pages 1094–1097. IEEE.
Gonzalez, R. C. and Woods, R. E. (2006). Digital Image
Processing. Prentice-Hall, Inc.
Guo, Q., Mandal, M. K., Liu, G., and Kavanagh,
K. M. (2006). Cardiac video analysis using Hodge-
Helmholtz field decomposition. Computers in Biology
and Medicine, 36(1):1–20.
Honarkhah, M. and Caers, J. (2010). Stochastic Simulation
of Patterns Using Distance-Based Pattern Modeling.
Mathematical Geosciences, 42(5):487–517.
Kalnay, E. (2003). Atmospheric modeling, data assimila-
tion and predictability. Cambridge university press.
Kruskal, J. B. (1964). Multidimensional scaling by optimiz-
ing goodness of fit to a nonmetric hypothesis. IEEE
Transactions on Visualization and Computer Graph-
ics, 29(1):1–27.
Lall, U., Devineni, N., and Kaheil, Y. (2016). An empiri-
cal, nonparametric simulator for multivariate random
variables with differing marginal densities and nonlin-
ear dependence with hydroclimatic applications. Risk
Analysis, 36(1):57–73.
Lantu
´
ejoul, C. (2013). Geostatistical simulation: models
and algorithms. Springer Science & Business Media.
Liew, K. J., Ramli, A., and Majid, A. A. (2016). Searching
for the optimum value of the smoothing parameter for
a radial basis function surface with feature area by us-
ing the bootstrap method. Computational and Applied
Mathematics, pages 1–16.
Luo, C., Safa, I., and Wang, Y. (2012). Feature-aware
streamline generation of planar vector fields via topo-
logical methods. Computers & Graphics, 36(6):754–
766.
Mariethoz, G. and Caers, J. (2014). Multiple-point geo-
statistics: stochastic modeling with training images.
John Wiley & Sons.
Mariethoz, G. and Lefebvre, S. (2014). Bridges between
multiple-point geostatistics and texture synthesis: Re-
view and guidelines for future research. Computers &
Geosciences, 66:66–80.
Oliver, M. and Webster, R. (2014). A tutorial guide to geo-
statistics: Computing and modelling variograms and
kriging. Catena, 113:56–69.
Palit, B. (2005). Application of the Hodge Helmholtz De-
composition to Video and Image Processing. Master’s
thesis, University of Alberta.
Pascucci, V., Bremer, P.-T., and Bhatia, H. (2014). The
Natural Helmholtz-Hodge Decomposition For Open-
Boundary Flow Analysis. IEEE Transactions on Vi-
sualization and Computer Graphics, 99(PrePrints):1–
11.
Petronetto, F., Paiva, A., Lage, M., Tavares, G., Lopes, H.,
and Lewiner, T. (2010). Meshless Helmholtz-Hodge
Decomposition. IEEE Transactions on Visualization
and Computer Graphics, 16(2):338–349.
Polthier, K. and Preuß, E. (2003). Identifying Vector Field
Singularities Using a Discrete Hodge Decomposition.
In Visualization and Mathematics III, pages 113–134.
Springer Berlin Heidelberg.
Popescu, R., Deodatis, G., and Prevost, J. H. (1998). Simu-
lation of homogeneous nongaussian stochastic vector
fields. Probabilistic Engineering Mechanics, 13(1):1–
13.
Ribeiro, P. C., de Campos Velho, H. F., and Lopes, H.
(2016). Helmholtz-hodge decomposition and the anal-
ysis of 2d vector field ensembles. Computers &
Graphics, 55:80–96.
Tong, Y., Lombeyda, S., Hirani, A. N., and Desbrun, M.
(2003). Discrete Multiscale Vector Field Decomposi-
tion. In ACM SIGGRAPH 2003 Papers, pages 445–
452. ACM.
Wackerly, D. D., Mendenhall, W., and Scheaffer, R. L.
(2008). Mathematical Statistics with Applications.
Thomson.
Wang, H. and Deng, J. (2014). Feature extraction of com-
plex ocean flow field using the helmholtz-hodge de-
composition. In 2013 IEEE International Confer-
ence on Multimedia and Expo Workshops, pages 1–6.
IEEE.
Wang, Z., Wang, X., and Ji, Q. (2014). Learning with hid-
den information. In ICPR, pages 238–243.
Wasserman, L. (2004). All of Statistics: A Concise Course
in Statistical Inference. Springer.
Xiu, D. (2009). Fast numerical methods for stochastic com-
putations: a review. Communications in computa-
tional physics, 5(2-4):242–272.
Bootstrapping Vector Fields
29
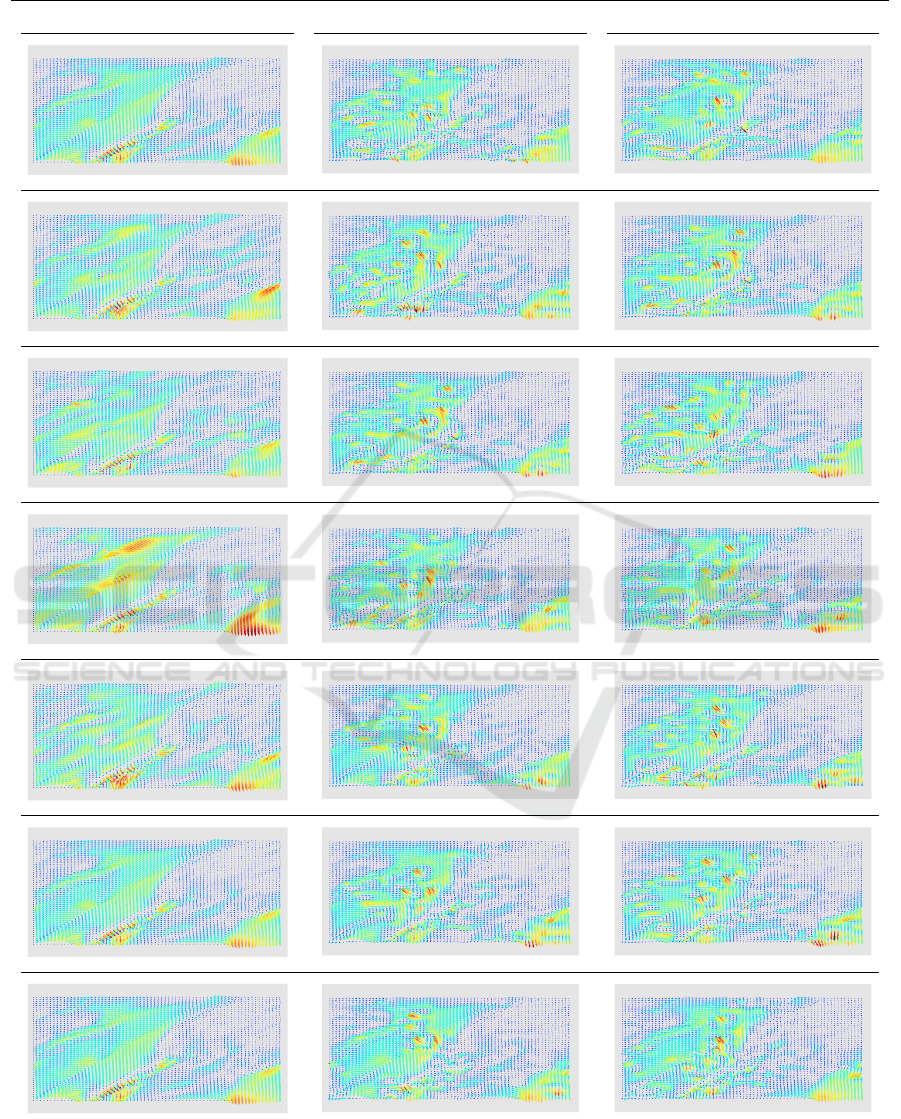
Table 4: Original realization and its closest and farthest simulation.
Realization Closest Simulation Farthest Simulation
GRAPP 2019 - 14th International Conference on Computer Graphics Theory and Applications
30
