Topolet: From Atomic Hand Posture Structures to a Comprehensive
Gesture Set
Amin Dadgar and Guido Brunnett
Computer Science, Chemnitz University of Technology, Straße der Nationen 62, 09111, Chemnitz, Germany
Keywords:
Generative Poselet, Topolet, Topological-based Temporal Model, Hidden Markov Model, Gestures’ Compre-
hensive Set, Context-Free Gesture Recognition, Description-based (Data) Specification.
Abstract:
We propose a type of time-series model for hierarchical hand posture database which can be viewed as a
Markovian temporal structure. The model employs the topology of the points’ cloud, existing in each layer
of the database, and exploits a novel type of atomic structure, we refer to as Topolet . Moreover, our temporal
structure utilizes a modified version of another atomic gesture structure, known as Poselet. That modification
considers Poselets from the vector-based generative perspective (instead of the pixel-based discriminative
one). The results suggest a considerable improvement in the accuracy and time-complexity. Furthermore,
in contrast to other approaches, our Topolet is capable of considering random gestures, thus introduces a
comprehensive set of gestures (suitable for context-free application domain) within the shape-based approach.
We prove that the Topolet could be enhanced to different resolutions of gestures’ set which provide the system
with the potential to be adapted to different application requirements.
1 INTRODUCTION
Hand gesture recognition systems would benefit from
a number of atomic structures within postures which
could capture the temporal information necessary to
relate a large set of postures to different gestures ef-
ficiently. These atomic structures would systemat-
ically construct interrelationships between different
postures, and thus relate different gestures more effec-
tively. Such structures could eradicate the necessity
of repetitive recording of similar postures and distinct
modeling of their temporal relation in different ges-
tures. Therefore, they exhibit potentials to resolve the
issue of high time-space complexities when a com-
prehensive/random gestures’ set is considered.
In the context of human body pose/action recog-
nition the novel idea of Grouplets was proposed by
(Yao and Fei-Fei, 2010). From that Orderlet (Yu
et al., 2015) and Gesturelet (Meshry et al., 2016)
for body pose, and Poselet (Bourdev and Malik,
2009) for hand gesture recognition were derived.
These Grouplets provide tools to formulate atomic
structures, however, they have a number of limita-
tions: First, they are action-dependent and thus, can-
not consider a random and comprehensive set of ac-
tions/gestures. Second, they lack an effective tem-
poral relationship, as the number of features are too
large. Finally, all these features are defined as the
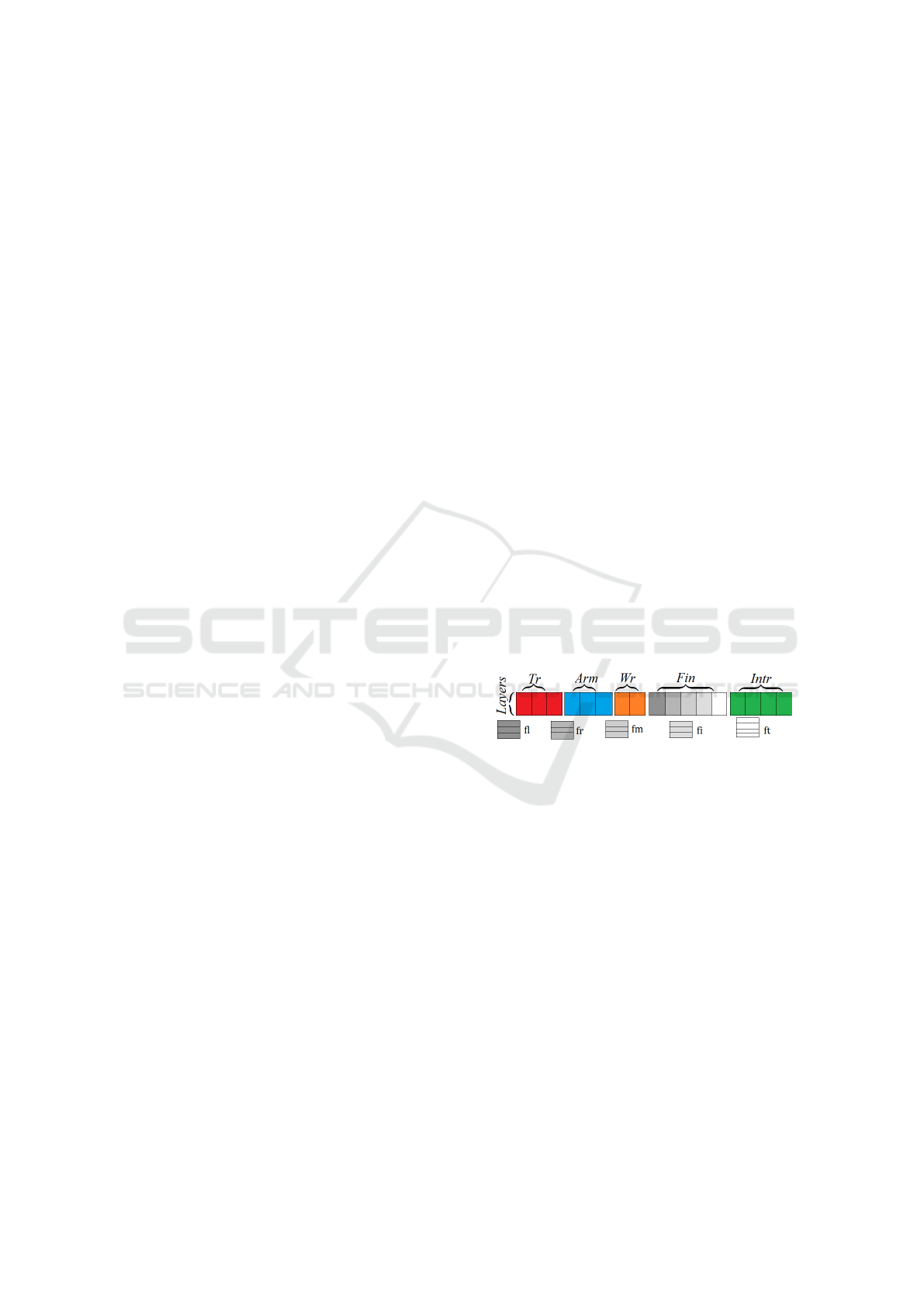
Figure 1: The data structure and the degree-of-freedom for
each (sub)layer: global translation (Tr, layer 1) with 3DoF,
global rotation (Arm, layer 2) with 3DoF, wrist rotation
(Wr, layer 3) with 2DoF, little fin states (fl, 3DoF), mid-
dle fin states (fm, 3DoF), index fin states (fi, 3DoF), thumb
fin states (ft, 4DoF), inter-finger states (Intr, 4DoF).
discriminative features on pixel-level data. That type
of data are highly dependent on camera view-point.
Therefore, any possible smaller structures on pixel-
level hardly follow a unique arrangement. Addition-
ally, pixel-level features may be invisible for a con-
siderable time interval. Therefore, robust sequential
relation could not be derived.
To address the last issue, we employ the pose-level
vector of hand. The hand’s pose-vector introduces
a type of data which can robustly be trackable over
time. The high degree-of-freedom (28), and thus the
presence of enormous number of states, is resolved
by employing the hierarchical database proposed by
(Dadgar and Brunnett, 2018). There, each posture is
restructured by a set of sub-vectors and layers ( Figure
1). Furthermore, for a set of postures that the database
Dadgar, A. and Brunnett, G.
Topolet: From Atomic Hand Posture Structures to a Comprehensive Gesture Set.
DOI: 10.5220/0007244701570164
In Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2019), pages 157-164
ISBN: 978-989-758-354-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
157
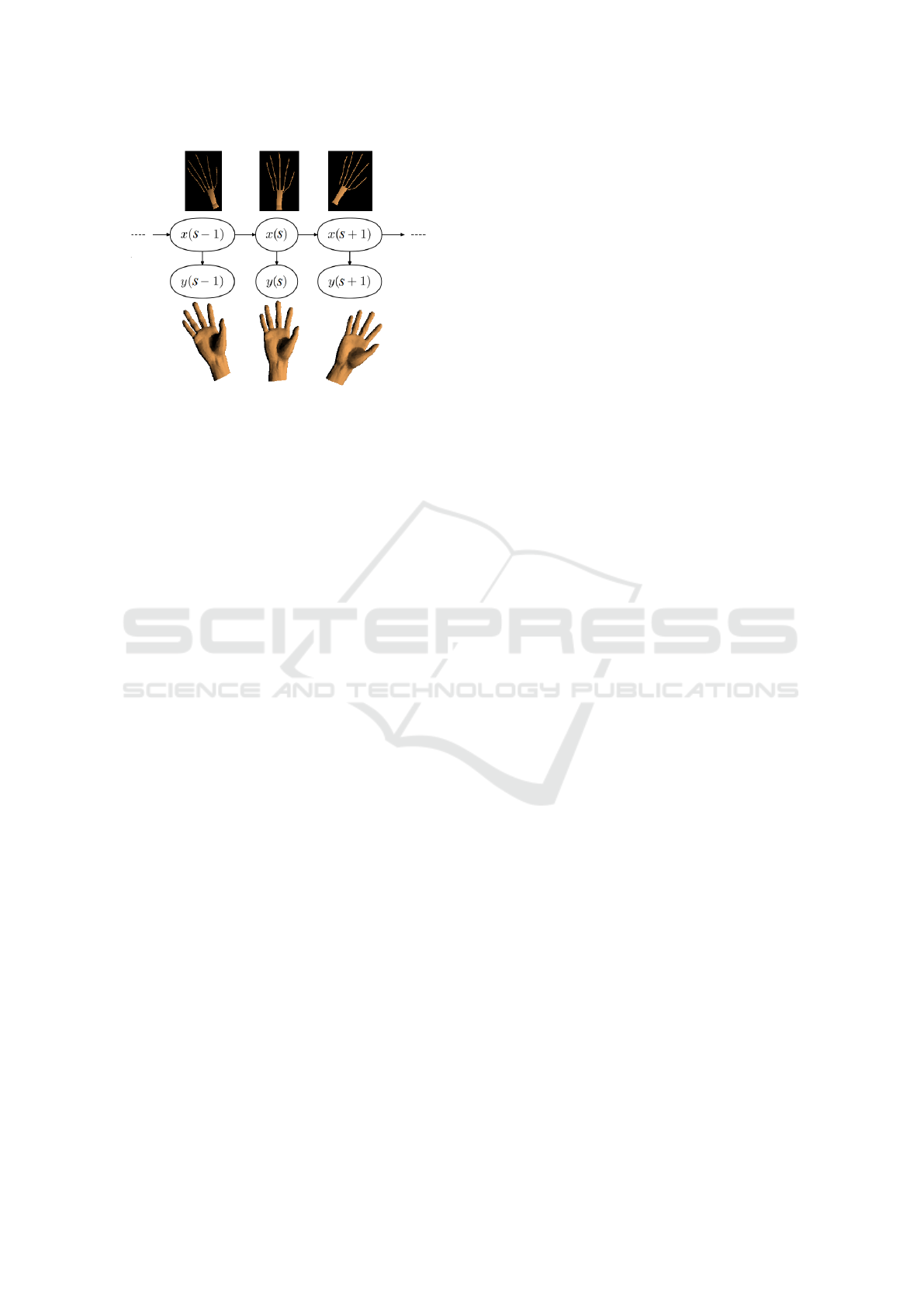
Figure 2: An example of allowable transition for the Topo-
let of layer 2 (global rotation) to the neighboring Poselets in
that space. The skeletons indicate the hidden states (in 3D
pose configuration space), and hand meshes indicate obser-
vation states (in 2D pixel space).
contains, each layer’s space consists of an equal num-
ber of points. We consider these points as one type of
our atomic structures (the generative Poselet).
Hidden Markov Model (HMM) (Rabiner, 1989)
has been frequently employed to acquire the tempo-
ral information of hand gesture between successive
frames and describe that gesture by a sequence of
states (Yang et al., 1994). Our novel method of ac-
quiring temporal information extends the specifica-
tions of HMM to the topology of the layers in our
hierarchical database. Our divide-and-conquer ap-
proach considers each of the mentioned generative
Poselet as one hidden state of our HMM-like method.
At each point in time only a few Poselets (features)
are relevant to construct a posture as the gesture pro-
ceeds, thus the second issue would be addressed.
To overcome the first issue, our procedure re-
duces the number of required temporal models to one-
model-for-one-layer. This approach is in the con-
trary of the conventional one-model-for-one-gesture
method. Therefore, for any gestures one requires
to have only a limited (but fixed) number of HMM-
like structure. One can use our structure to construct
a comprehensive gestures’ set or enable a context-
free (gesture-independent) application domain recog-
nition. Since our temporal information is acquired
based on the topology of each layer we refer to it as
the Topolet (topology + Poselet, Section 3.1).
In our results ( Section 4) we prove the flexibility
of the model in dealing with different resolutions of
the postures’ set based on shape feature. Moreover,
we demonstrate the potentials of our Topolet to per-
form the gesture recognition task in real-time.
2 RELATED WORK
Hand gesture is inherently stochastic (Yang et al.,
1994). That is, if a person repeats (or if a group of
individuals performs) a certain gesture, the measure-
ments of that gesture will be different. That implies,
there are hidden specifications which are common in
the different recordings for one certain gesture (Yang
et al., 1994). In the field of hand gesture recognition,
(Yang et al., 1994) employed nine HMMs for recog-
nizing nine 2D gestures in drawing the digits from 1
to 9 with a mouse. These gestures were single-path
(palm point) ones and no details about finger poses
were estimated. To unfold the hidden patterns of ges-
tures, HMM needs an index of the previous state (s)
of the system together with the approximate dynam-
ics (a
i j
) of the system which would be represented in a
transitional matrix (A). Additionally, it is necessary to
store the same-class variations of the observations in
an emission matrix (B) together with the initialization
variable (π). To calculate and employ these variables
three standard problems must be solved (Rabiner,
1989): evaluation, decoding, and training. Standard
solutions to these problems, which relate them to each
other under Bayesian framework (Rabiner, 1989).
Bayesian semantics enable the HMM to cope with
uncertainties in both human performances and sens-
ing processes (Yang et al., 1994). The standard solu-
tions to these problems exhibit inefficiencies. In order
to more efficiently employ HMM for the purpose of
hand gesture recognition, the approach of collecting
the training data is an important decision.
There are two ways of collecting gestures’ data:
example-based and description-based (Yang et al.,
1994). Most gesture recognition systems employ the
example-based specification because it shows more
flexibility on small variations of one gesture (Yang
et al., 1994). However, its main drawback is the
diffi- culty of considering a large number of gestures
(Yang et al., 1994). The description-based specifica-
tion was applied to the field of sign language (Starner
and Pentland, 1995) and was capable of consider-
ing greater number of gestures. However, because of
lacking a meaningful relation between the syntaxes
and the hidden states, the description-based specifica-
tion exhibits two main problems: First, the number of
learned HMMs has to be still large (Yang et al., 1994).
Second, slight variations of the same gestures can be
easily misclassified. In order to acquire a comprehen-
sive temporal information, description-based specifi-
cation is a preferable method of data collection, how-
ever its two drawbacks must be addressed first. To
address those issues, we extend the HMM’s specifi-
cations to a topology-based scheme ( Section 3.1).
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
158

Figure 3: Next posture (P
3
) in a gesture sequence mod-
eled with eight parallel HMMs (Pl means Poselet). Bigger,
lower and equal indexes of next Poselets indicate forward,
backward, and no transitions, respectively.
3 METHODOLOGY
One main difficulty with HMM is to determine an ap-
propriate number of hidden states (Sangjun et al.,
2015). That especially is a problem when HMM is
employed to model random/comprehensive gestures’
set. That is, when a large number of gestures with var-
ied lengths is to be recognized, the number of states
also must be altered. In order to model all gestures the
underlying structure of the acquired temporal infor-
mation should be flexible to considerable modifica-
tions. That obliges the system to repetitively perform
that difficult task of state-number estimation. We ef-
fectively address that issue by employing the genera-
tive Poselets as the states in each (sub)layer. Since the
number of Poselets in each (sub)layer is fixed, there-
fore, the number of states and thus the structure of our
HMM-like Topolet also remains unchanged.
Our proposed Topolet could also effectively ad-
dress the first problem of description-based specifica-
tion (Section 2). More specifically, we utilize one-
HMM-for-one-layer training scheme based on the
topology of the points’ trajectory in each (sub)layer
(nearest neighbors of each Poselet). Therefore, us-
ing these atomic structures, Poselet and Topolet, the
number of HMM-like structures will be fixed to the
number of (sub)layers (e.g. eight). Therefor, the issue
of linear growth of the complexities with the number
of considered gestures is effectively addressed.
We also propose an effective novel method to cal-
culate the emission matrix. More specifically, we
model the same-class variations of the Poselets, and
thus postures/gestures, based on the inter-topological-
spaces between the neighboring Poselets. That could
eliminate the necessity of recording several gesture
sequences which belong to an identical class and in-
crease the flexibility of the system when slight vari-
ations in gestures are observed. Therefore, it ad-
dresses the second issue existing in the construction
of description-based database.
The entire temporal information is encoded in all
these layered-wise HMM-like structures in parallel
(Figures 2 and 3). That is, one posture is constructed
by orderly-connecting all Topolets at each point in
time. A gesture also is formed by considering all these
Topolets over a period of time. To acquire the Topo-
lets, however, it is necessary to appropriately modify
the solutions to the standard problems of HMM.
3.1 Topolet: Temporal Information of
Poselet’s Topoloy
Data Structure: The Poselets’ vector (
−→
Pl) for each
(sub)layer is as follow (See Figures 1 and 3):
Pl
1
= {p
x
, p
y
, p
z
}: global translation (p, position),
Pl
2
= {a
x
,a
y
,a
z
}: global (Arm) rotation (a, angels),
Pl
3
= {w
x
,w
z
,}: wrist rotation (angel),
Pl
4
1
= { f l
u
x
, f l
m
x
, f l
l
x
}: little finger ( f l) states,
Pl
4
2
= { f r
u
x
, f r
m
x
, f r
l
x
}: ring finger ( f r) states,
Pl
4
3
= { f m
u
x
, f m
m
x
, f m
l
x
}: mid finger ( f m) states,
Pl
4
4
= { f i
u
x
, f i
m
x
, f i
l
x
}: index finger ( f i) states
Pl
4
5
= { f t
l
z
, f t
m
z
, f t
l
x
, f t
l
z
}: thumb fin ( f t) states and
Pl
5
= { f l
z
, f r
z
, f m
z
, f i
z
} inter finger states, where
u,m, and l denote the upper part, middle part and the
lower part of each finger, respectively.
Database Enhancement: To introduce the required
modifications to HMM structure we enhance the pre-
viously proposed database (Dadgar and Brunnett,
2018) in two directions. First, we form the global
(forearm) rotation layer (L
2
) using the quaternions
(instead of Euler angles). That assists us to eradi-
cate the duplicated rotations introduced by Euler axis
uniform quantization. Second, we loosely divide the
finger-state layer (L
4
) into five sub-layers (little finger
L
4
1
, ring L
4
2
, middle L
4
3
, index L
4
4
,and thumb L
4
5
,
Figure 1). That facilitates the system to consider one
Topolet for each finger. Furthermore, these two en-
hancements enrich the gestures vocabulary that could
be considered by our system.
Parameters of the Topolet: We determine the en-
tire temporal information of all gestures as a set of
parallel Topolets: Λ = {T l
i
,T l
4
j
|i = [1,5], j = [1,5]},
where T l denotes a Topolet, i is the layer index and j
is the finger index. The Topolet of layer i is defined as:
T l
i
= {Pl
i
s
,A
L
i
,B
L
i
,π
L
i
}, where Pl denotes a Poselet,
s is index of the Poselet in the layer, A
L
i
marks the
transitional matrix, B
L
i
defines the emission matrix,
and π
L
i
determines the initialization variable of the
Topolet for that layer. In our implements, we assume
that the detection and localization of hand is a solved
problem. Therefore, we do not consider the layer one
Topolet: From Atomic Hand Posture Structures to a Comprehensive Gesture Set
159

a) b) c) d) e) f) g)
Figure 4: Topology of the layers for Arm-rotation (Figure a), Wrist-rotation (Figure b), Inter-Finger states (Figures f and g),
and sub-layers Little-Fingers states (Figure c) and Thumb-Finger states (Figure d and e) in Low-resolution (LD). The little,
ring, index, and middle state spaces are similar (Figure c). Therefore, only one finger is shown.
in this work.
Transitional Matrix A
L
i
: According to the above
data structure and the Figures 1 and 4, the Poselets
of the layers L
2
, L
3
, and L
5
are situated on lattices (n-
orthotope). More specifically, Layers two (L
2
), three
(L
3
), and five (L
5
) are 3-orthotope (cube), 2-orthotope
(rectangle), and 4-orthotope, respectively. We con-
sider each point in the lattices as the hidden state of in
our HMM-like structure. Therefore, the topological-
based formation of the transitional matrix for each
layer using n-nearest-neighbors scheme is as follow-
ing: For any given Poselet (current-state) we find the
n
s
-nearest-neighbors (n
s
possible next-states) in that
specific lattice. These neighbors determine the possi-
ble transitions from each Poselet at each point in time
to other Poselets. The specific topological structure
of each layer introduces a particular number of neigh-
bors for any current state in that layer. For example, in
layer L
2
, which has a rectangular topology, the local
number of neighbors for each state, n
s
, when n = 1,
is either 2, 3, or 4 (green and orange Poselets in Fig-
ures 9.b). Based on that local number of neighbors
the transitional probability to a specific state is set as
1/n
s
. Thus, the transitional matrices for these layers
(A
L
2
,A
L
3
,A
L
5
) are constructed.
The transitional matrix of Layer 4 (L
4
), which
consists of five sub-layers of finger-states, is com-
puted by a different approach. In that layer, little,
ring, middle, and index fingers each contains 3DoF
and thumb has 4DoF topological structure ( Figure 1),
but the Poselets do not form complete lattices ( Fig-
ure 4.c-e). Therefore, n-nearest neighbors cannot be
computed correctly. But the number of states for each
finger is limited, hence the possible transitions be-
tween these states are visually determined ( Figure 6).
These transitional matrices for fingers are specified as
A
L
4
j
. In our implements, we set n = 1. However,
other values (such as n = 2, Bakis model (Rabiner,
1989)) which suit different system/application spec-
ifications (e.g. camera frame-rate) are also possible.
Furthermore, our Topolet handles the self-transition.
That facilitates the system to recognize the stationary
(alongside with dynamic) gestures which remain at a
specific posture for an interval of time.
In addition to the mentioned advantages, our
topology-based computation of the transitional ma-
trix extends the conventional HMM in the following
ways: First, it enables the system to consider the left-
right forward and right-left backward transitions both
at the same time and in one unified structure. Second,
the major problem with conventional HMMs is that
one cannot use a single observation sequence to train
the parameters. That is principally due to a large num-
ber of transient states exists between two main states.
Hence, to make a reliable estimation of all parame-
ters, one has to use multiple observation sequences.
In our Topolet, the training is performed based on the
topological positions of the trajectory points. There-
fore, one could train the inter-space of two states as
transient postures, and hence eradicate the necessity
of several observation sequences for training.
Higher-Resolution Transitional Matrix: To provide
the system with a richer set of postures, and hence
smoother gestures, a collection of higher-resolution
A
L
i
is calculated. These matrices are calculated based
on the layers of mid-resolution database (MD) which
contains higher number of Poselets ( Figure 5) as
compared to the low-resolution database (LD). Thus
the number of states and size of the transitional matri-
ces are increased. Enhancing the resolution of the lay-
ers L
2
,L
3
,L
5
is accomplished by uniformly increas-
ing the population of Poselets of these layers’ space (
Figure 5). However, the number of Poselets for each
finger (sub)layer is manually increased. For exam-
ple, different versions for Bend-state (Bend
1
, Bend
2
,
Bend
3
, and Bend
4
) are visually defined ( Figure 6).
The calculated higher-resolution matrices, and
thus richer set of gestures, emphasizes an other im-
portant advantage of our Topolet. That is, the increase
in the size of the transitional matrices does not lead
to higher time-complexity during the search. This is
due to the fact that the local number of next Poselets
(states) is determined by the value of n, which in our
implementation is set to one (= 1). The topological
properties of these layers (n
s
) do not change after we
increase the resolution of them. Therefore, no extra
time-complexity is imposed to the system.
Initialization Variable π
L
i
: The initial state proba-
bilities are calculated similar to conventional HMM:
π
L
i
Pl
=⇒ {0, Pl 6= 1 and 1, Pl = 1}.
Emission Matrix B
L
i
: Conventionally HMM is de-
fined as follows (Rabiner, 1989) (Yang et al., 1994):
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
160
a) b) c) d) e) f) g)
Figure 5: Topology of the layers for Arm-rotation (Figure a), Wrist-rotation (Figure b), Inter-Finger states (Figures f and g),
and sub-layers Little-Fingers states (Figure c) and Thumb-Finger states (Figure d and e) in Mid-resolution (MD). The little,
ring, index, and middle state spaces are similar (Figure c). Therefore, only one finger is shown.
Figure 6: Visually determining the transitions between fin-
gers’ states. This figure shows the transitional matrix of the
finger states for the mid-resolution database. The allowed
transitions are marked with : a. Up, b. Forward, c. Half-
Bend
1
, d. Half-Bend
2
, e. Bend
1
, f. Bend
2
, g. Bend
3
, h.
Bend
4
, i. Half-Close
1
, j. Half-Close
2
, k. Half-Close
3
, l.
Half-Close
4
, m. Close. Notice that, in our implementation,
the self-transition is allowed.
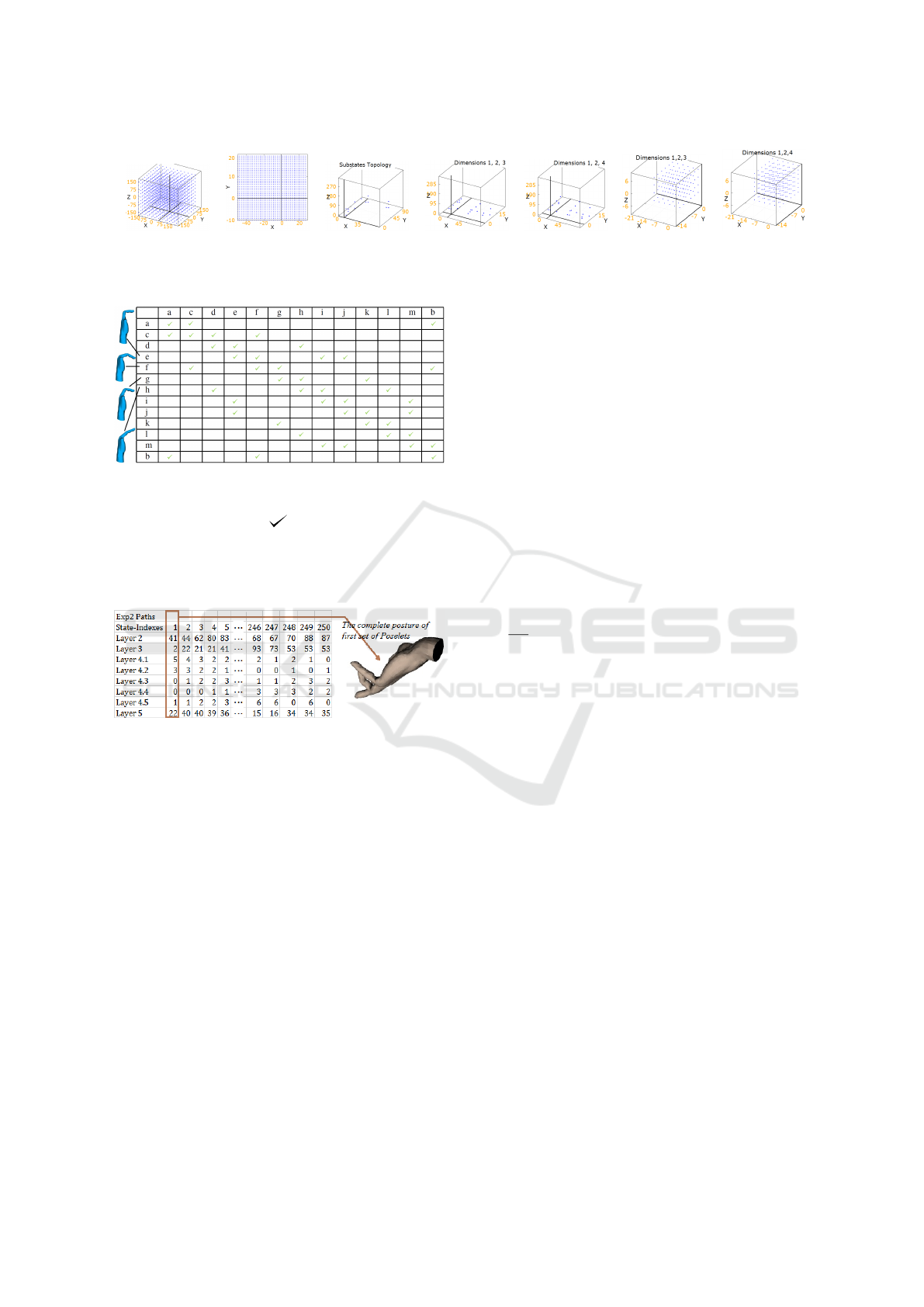
Figure 7: Eight different paths of one gesture in experi-
ment 2 which is consisted of a sequence of 250 complete
(all-eight-layers) postures. At each point in time one com-
plete posture can be constructed by using all eight indexes
of Poselets in each layer.
If a multi (P)-path gesture has N (= 10) postures, the
size of the transition matrix will be 10 × 10. Further-
more, if there are M (= 5) gestures of the same class
in the observation/training data (with variations), the
size of the emission matrix will be N × M (10 × 5).
One main issue with this definition is the inaccu-
rate and inefficient determination of the number of
emissions. More specifically, we cannot systemati-
cally determine how many same-class variations of
a gesture should be recorded to calculate the emis-
sion matrix efficiently. Our Topolet, however, intro-
duces a systematic approach for computing that ma-
trix. That is, the emissions are calculated based on
the distance of the inter-space points to the neighbor-
ing points. That topological information determines
the same-class variations accurately and thus, reduces
the required number of recordings for identical class
of gestures. Furthermore, in our approach we do not
need an extra signal processing technique (on pixel-
level) to convert the continuous paths into P-symbols,
as it is reported in (Yang et al., 1994).
To determine the emission matrix we utilize
two mentioned databases (MD and LD) in K-means
framework (MacQueen, 1967). That is, the Pose-
lets within LD database are employed as the initializa-
tion centers of the K-means (the number of LD Pose-
lets determines the number of clusters). Whereas, the
Poselets in MD database are regarded as the points’
cloud which are to be clustered ( Figure 9.c). There-
fore, those Poselets, which are classified in one clus-
ter, is considered as the same-class variations for each
state. Within this efficient approach, the emission
probabilities determine the closeness of each emis-
sion to the center of that cluster. Thus, each proba-
bility is calculated based on the ratio of two distances
as:
d
e
∑
d
e
, where d
e
marks the distance of each ele-
ment from the center of cluster. Since each K-means
cluster has different number of Poselets, we consider
the minimum number, existing in all clusters, as the
number of emissions, M
L
i
, for that layer. Therefore,
N
L
i
× M
L
i
emission matrix is constructed.
4 EXPERIMENT
To demonstrate the efficacy of our Topolet, we con-
duct five experiments. For these experiments, the
input to the recognition system is created as follow-
ing: First, a Viterbi-like algorithm is employed to re-
turn a path of Q states, based on the (maximum-a-
posterior) probabilities of the n
s
-nearest neighbors for
each layer. The initial state and length of the Topolet,
Q, for each layer are the inputs to the Viterbi algo-
rithm. Furthermore, the number of returned paths is
equal to the number of considered layers of interest
in each experiment. For example, if an experiment
is aimed at evaluating the performance of complete
posture sequence, eight different paths (one for each
layer) is returned ( Figure 7). Second, the Poselet ’s
image corresponding to each of these state-indexes’
sequence is retrieved ( Figure 9.a). Similarly, if the
experiment is on multiple layers (Exp 2-5), the input
Topolet: From Atomic Hand Posture Structures to a Comprehensive Gesture Set
161
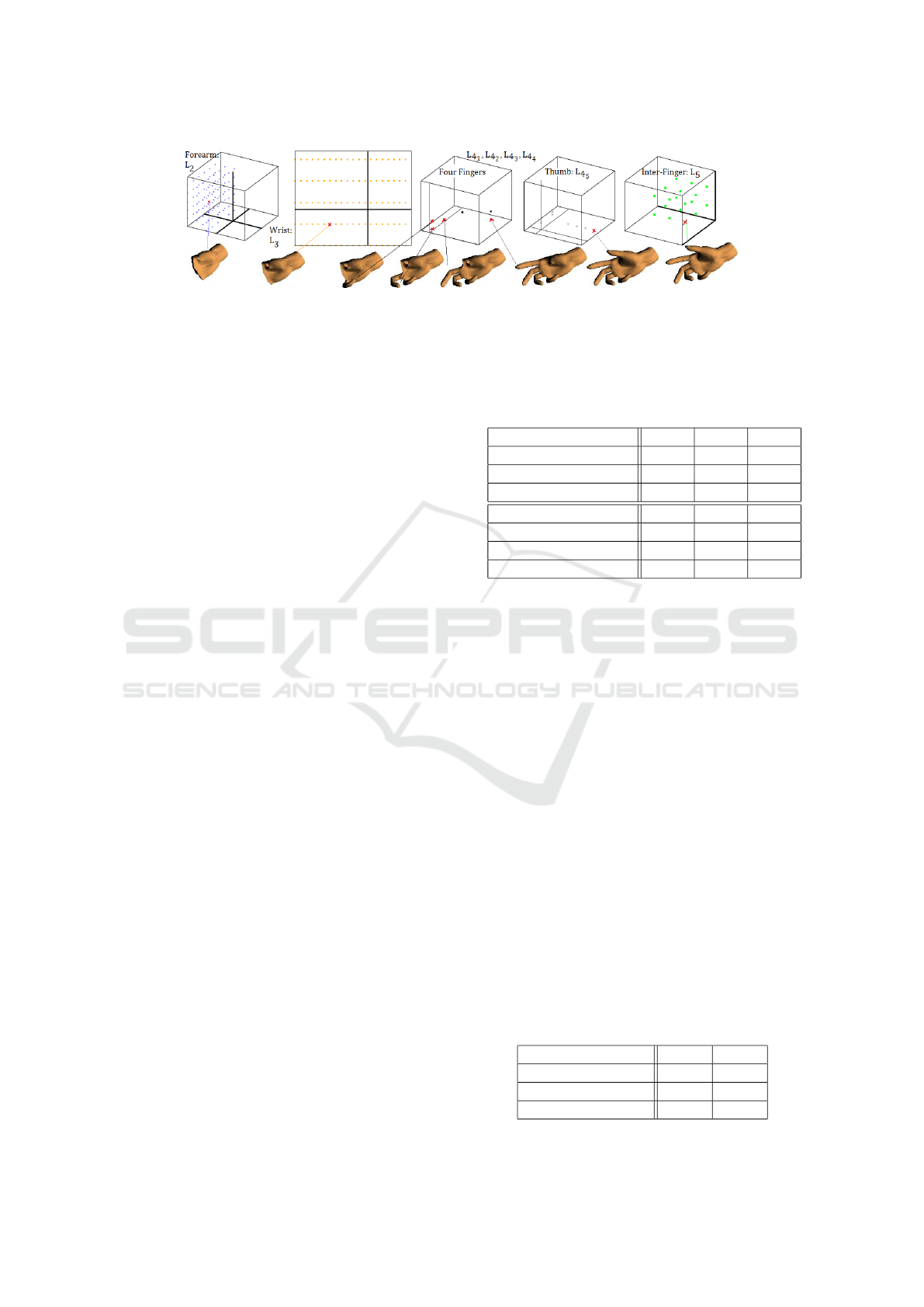
Figure 8: Process of combining eight parallel Poselets to construct a posture. The next posture is constructed from the
nearest-neighbors of these Poselets. The Poselet spaces’ colors correspond to the colors’ code of each layer in Figure 1.
will be the combination of all Poselets in the paral-
lel format to form a complete posture image ( Figure
8). Third, the OpenCV’s contour extraction method
(Bradski, 2000) is applied to the input frames to ex-
tract the contour points. In our experiments, the input
and searched images’ size is 800 × 600 pixels, and
the 3D hand model’s length and width (in 3D frontal
view) are 10 and 4 units (cm), respectively.
Estimation is performed using the maximum-a-
prior (MAP) criterion and the Chamfer distance as
the penalty function. The criterion finds the optimal
Poselet at each layer by comparing the contour points
of the nearest Poselets and of the input. If the input
is a sequence of Poselets in one layer, the solution to
each frame is one index which minimizes the penalty
function. Whereas, if the input is a sequence of com-
plete postures, the solution will be a set of (eight) in-
dexes. During the search, the previous state of each
Poselet in the sequence is known.
The first experiment evaluates the estimation ac-
curacy and time of the Topolet for layer-two (forearm-
rotation), layer-three (wrist-rotation), and layer-five
(inter-finger rotation), separately. The goal is to
demonstrate, by employing our Topolet we can out-
perform the results (mean errors and fps) in com-
parison with layered-exhaustive search (Dadgar and
Brunnett, 2018). For this experiment, we have created
a synthetic gesture consiting of 250 Poselets, and as
the results show ( Table 1), considerable improvement
is recorded during estimation using our Topolet. The
estimation of the layers- three and five is relatively
easier than the layer-two, because we set the forearm
to bind-pose (frontal and upward-view in this case) in
those two searches ( Figure 9.a). On the other hand,
that frontal-view of the Poselets leads to a slower fps
than many other views of the forearm. That is due
to the higher number of contour points existing in the
frontal view of the hand. That greater number of con-
tour points obliges more expensive contours extrac-
tion and slower pixel-wise comparison process than
other views.
In experiments two and three we consider the
combination of all layers (L
2
, L
3
, L
4
, and L
5
).
Table 1: Comparison of the Topolet and layered-exhaustive
search (Layered-EXH) methods. This experiment is per-
formed on layer-two (L
2
), layer-three (L
3
), and layer-five
(L
5
). The performance improvement (duration and accu-
racy of the searches) based on our (Topolet) is evident.
Exp1 Topolet L
2
L
2
L
2
L
3
L
3
L
3
L
5
L
5
L
5
Mean 3D Error (cm) 0.246 0.244 0
Mean 2D Error (px) 0.7 0.7 0
Search Time (s) 0.094 0.108 0.195
Exp1 Layered-EXH L
2
L
2
L
2
L
3
L
3
L
3
L
5
L
5
L
5
Mean 3D Error (cm) 1.503 0.557 0
Mean 2D Error (px) 11.4 16.5 0.1
Search Time (s) 1.859 2.480 1.718
Accordingly, we consider a synthetic gesture with
250 postures for experiment-two and 2500 postures
for experiment-three. While the experiment-two is
oriented to evaluate the performance on the low-
resolution (LD) database, the experiment-three is tar-
geted to examine the efficiency of the Topolet on
the mid-resolution (MD) database. The goal of the
experiment-three is to demonstrate the possibilities
of decreasing the errors (compared to experiment-
two) by training our Topolet on the layers with a
more aggregated points-cloud. We can observe that
experiment-three exhibits better accuracy while the
fps remains almost the same ( Table 2). The main
source of the errors is due to the invisibility of the
fingers in many inputs. Since the image sequences
are selected in a random Viterbi-like process, encoun-
tering invisible fingers is inevitable. Depending on
the application, one could constraint the hand to have
reasonable rotation toward the camera by which the
Table 2: The overview of experiment-two and -three. These
two experiments are aimed to find the optimum complete-
postures (combination of all layers). The enhancement of
the accuracy in experiment-three (which is performed on
mid-resolution (MD) database) is evident while the search
duration is not noticeably affected.
Experiments Exp 2 Exp 3
Mean 3D Error (cm) 2.221 2.019
Mean 2D Error (px) 6.5 10
Search Time (s) 0.49 0.64
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
162
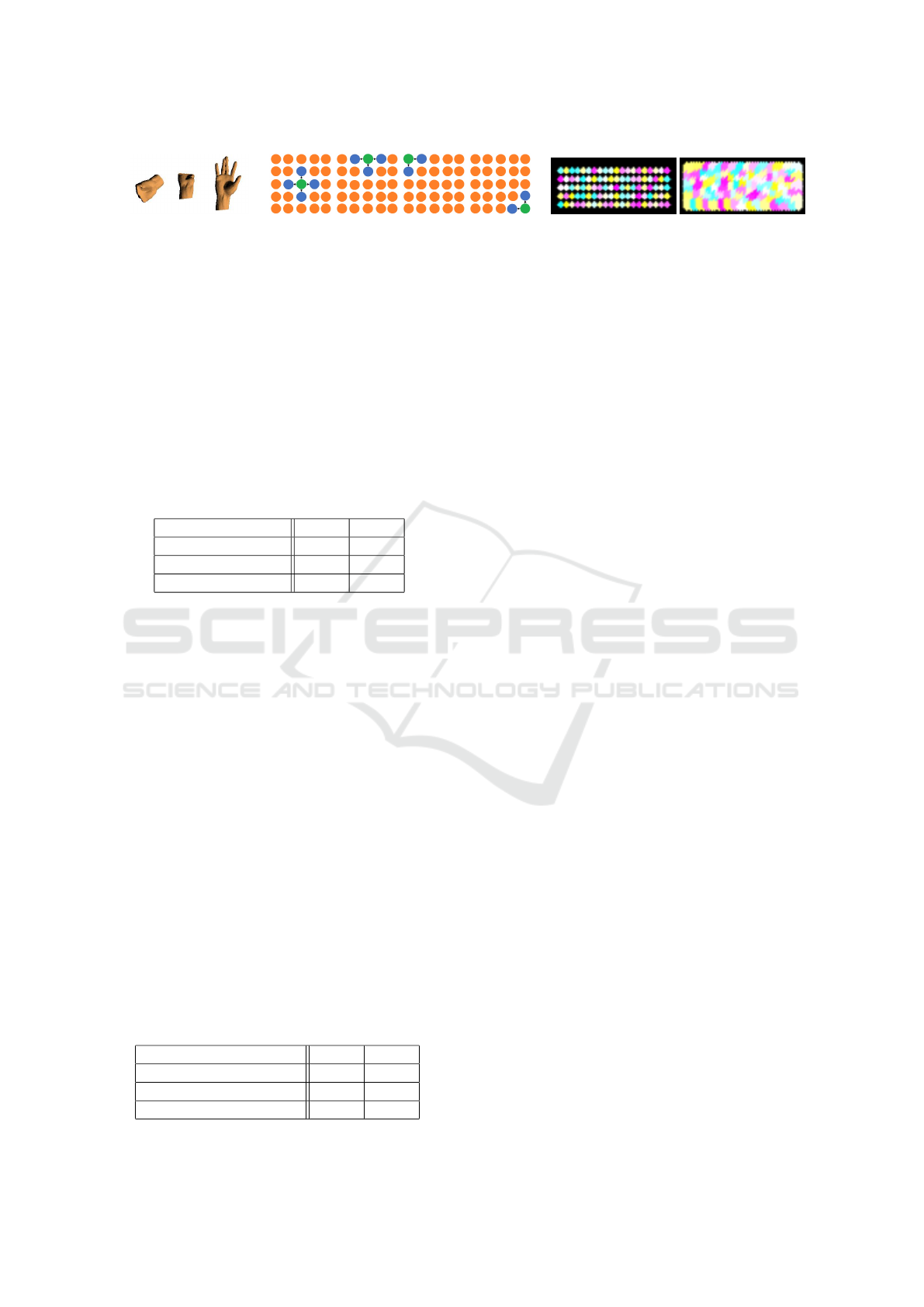
a) b) c)
Figure 9: a) Three examples of Poselets in layer-2, layer-3, and layer-5. b) n
i
= 4 possible n =1-nearest-neighborhoods (blue)
of the current state (green). If the current state is at the edge of the rectangle, the number of possible transition will be less
(n
i
= 3 or 2). In our implementation we consider the self-transition to make the iterative gestures also possible (n
i
= 5, 4, or
3). Note that, n is different from n
i
: n determines the how far the algorithm should look for the next state in the topological
space. The value of n is constant for the entire process and we set it to one. Whereas, n
i
determines the actual number of
neighbors for each state. The value of n
i
depends on the position each state is situated in the topology. c) Kmean over the LD
and MD databases and the formation of emission matrix.
fingers become (at least) partially visible. That could
increase the accuracy by a significant factor.
Table 3: The overview of experiment-four and -five.
Experiment-four is performed on distorted contours and
experiment-five is accomplished without considering the
layer-five in the search. Enhancement of the search dura-
tion in both experiments (in comparison with experiment-
two and -three) is evident while the accuracy remained al-
most unchanged.
Experiments Exp 4 Exp 5
Mean 3D Error (cm) 2.025 2.028
Mean 2D Error (px) 10.3 10.3
Search Time (s) 0.32 0.25
The result of experiment-three shows a reason-
able accuracy, however, we have conducted two more
experiments (the experiments- four and five) to im-
prove the time-complexity of the search. Therefore,
similar to experiment-three, these experiments are de-
signed and performed on the mid-resolution database
(MD), with identical gesture sequence. However, in
experiment-four the number of contour points (in con-
tour extraction) are reduced, and in experiment-five
the layer five (inter-finger rotation) is not considered
and is set to bind-pose. The idea behind experiment-
four is to evaluate the robustness of our Topolet
when distorted contours are employed. Whereas, the
idea behind experiment-five is to examine the en-
tropy of information existing in layer-five in com-
parison to the time-complexity it imposes on the
whole process. As it is demonstrated in Table 3,
the results exhibit vivid improvements in the time-
complexities of experiments- four and five (3 fps and
4 fps, respectively) in comparison to the experiment-
Table 4: The detailed overview of experiment-four and -
five. According to the table, it is evident that contour extrac-
tion time and visualization of the Poselets using openGL is
the most expensive part of the system.
Experiments Exp 4 Exp 5
Contour Ext Time (s) 0.11 0.08
2D Distant Comp Time (s) 0.03 0.03
Visualization Time (s) 0.11 0.09
three (while the accuracy remains almost unchanged).
Additionally, the reduction of the contour points in
experiment-four has no effect on improvement of the
time-complexity after a certain value. That is, in ev-
ery other p contour point selection process, p = 4 is
the optimum value.
5 DISCUSSION & CONCLUSION
In the past decades many researchers strove to over-
come the obstacles in designing of a reliable hand ges-
ture recognition system. Those obstacles were espe-
cially more severe if the system is ought to perform
in real-time, employ single RGB camera, and recog-
nize a large set of gestures. Therefore, many systems
relaxed one or two of these requirements. We pro-
posed a type of temporal model for gestures based on
our hierarchical hand posture database to meet all the
above requirements. Our HMM-like model utilizes
the topology of the points’ cloud in each layer and ex-
ploits a novel type of atomic structure, we refer to as
Topolet. Furthermore, it benefits from an enhanced
version of another atomic gesture structure, known
as Poselet . These two atomic structures allowed us
to consider random, and thus context-free application
domain, gesture set. Moreover, the system utilized
a single and RGB (instead of depth (Sharp et al.,
2015)) camera and showed a great potential to per-
form in real-time.
Our Topolet successfully addressed many tradi-
tional issues exist in conventional HMM. For exam-
ple, one difficulty with HMM is to determine an ap-
propriate number of hidden states even if the con-
text of application domain is known (Sangjun et al.,
2015). The database we utilized contained a fix num-
ber of Poselets at each layer which was uniformly dis-
tributed within the lower (than 28) dimensional space.
Since our proposed Topolet considered these Poselets
as the transitional states, the number of states in the
temporal model was remained fixed, thus the issue
was resolved. An other difficulty with conventional
HMM is the linear space-complexity as the number
Topolet: From Atomic Hand Posture Structures to a Comprehensive Gesture Set
163

of considered gestures increases. Our Topolet spec-
ified the sequence of possible Poselets (and not pos-
tures) within a gesture. One Topolet was trained for
each layer and a concrete relation between different
Poselets of that layer is introduced. That led to con-
struction of semi-gestures (or Topolets). The Topolets
of all layers together captured the temporal informa-
tion between different postures. Therefore, the entire
temporal information of any gesture consisted of sev-
eral but limited (eight) Topolets in a parallel mode.
This limited number of Topolets remained the same
for any configurations and for any number of gestures,
and thus the issue of linear growth was resolved. Ad-
ditionally, our Topolet enhanced the structure of the
training, decoding, and evaluation algorithms. For ex-
ample, conventional HMM theoretically requires infi-
nite number of examples for one gesture to reliably
train the parameters using the complex Baum-Welch
algorithm. Our method investigated the topological
relation of the Poselet points and, therefore, reliable
relations between the postures were established us-
ing one example. After all, within a vision-based
approach (RGB Camera), and in dealing with (po-
tentially) infinite number of (randomly created) ges-
tures, we achieved a notable 3fps in Exp4 and 4fps
in Exp5. We used a naive contour extraction method
which was an expensive part of our process ( Table
4). By employing a real-time contour extraction al-
gorithm (deep net (Bertasius and Torresani, 2015))
we could achieve higher fps on this time consuming
process.
In addition to those proven advantages, our pro-
posed method could introduce a number of other po-
tential benefits. The atomic structures could be used
to construct a comprehensive grammar between the
Poselets, Topolets, postures, and gestures. That is, if
we consider each gesture as a sentence and each pos-
ture as a word, one Poselet could be viewed as a word
syllable (with each DoF of the Poselet as a letter).
Then each of the trained Topolet specifies how each of
those Poselets could evolve as the gesture proceeds in
time. Therefore, the system will be capable of form-
ing a flexible description-based specification for hand
gesture database (Wang et al., 2012). Furthermore,
in the process of gestures transition, there might be
some transient (false) gestures depending on the con-
text of the application, where the system should per-
form no specific action. With our comprehensive ges-
ture’s temporal model, one could deactivate some of
the points’ cloud in each layer and acquire the Topo-
lets on a smaller space. That feature could be used to
concretely adopt the proposed Topolet to different ap-
plication domains. The evaluation of these statements
will be the topics of future works.
ACKNOWLEDGMENT
I would like to thank the Europ
¨
aischer Sozialfonds f
¨
ur
Deutschland (ESF) scholarship and the Professorship
of Graphische Datenverarbeitung und Visualisierung
at TU-Chemniz who made this research possible.
REFERENCES
Bertasius, G. and Torresani, L. (2015). DeepEdge : A
Multi-Scale Bifurcated Deep Network for Top-Down
Contour Detection. In CVPR.
Bourdev, L. and Malik, J. (2009). Poselets: Body Part De-
tectors Trained using 3D Human Pose Annotations.
IEEE Int Conf on Com Vis, pages 1365–1372.
Bradski, G. (2000). The OpenCV Library. Dr. Dobb’s Jour-
nal of Software Tools.
Dadgar, A. and Brunnett, G. (2018). Multi-Forest Classifi-
cation and Layered Exhaustive Search Using a Fully
Hierarchical Hand Posture / Gesture Database. In VIS-
APP, Funchal.
MacQueen, J. B. (1967). Some Methods for Classification
and Analysis of Multivariate Observations. Berkeley
Symp on Maths, Statis, Prob, 1(233):281–297.
Meshry, M., Hussein, M. E., and Torki, M. (2016). Linear-
Time Online Action Detection from 3D Skeletal Data
using Bags of Gesturelets. IEEE WACV.
Rabiner, L. (1989). A Tutorial on Hidden Markov Models
and Selected Applications in Speech Recognition.
Sangjun, O., Mallipeddi, R., and Lee, M. (2015). Real Time
Hand Gesture Recognition Using Random Forest and
Linear Discriminant Analysis. Proc of the Inter Conf
on Human-Agent Interaction, (October):279–282.
Sharp, T., Keskin, C., Robertson, D., Taylor, J., Shotton,
J., Kim, D., Rhemann, C., Leichter, I., Vinnikov, A.,
Wei, Y., Freedman, D., Kohli, P., Krupka, E., Fitzgib-
bon, A., and Izadi, S. (2015). Accurate, Robust, and
Flexible Real-time Hand Tracking. ACM Conf on Hu-
man Factors in Comp Sys (CHI), pages 3633—-3642.
Starner, T. E. and Pentland, A. (1995). Visual Recognition
of American Sign Language Using Hidden Markov
Models. Media, pages 189–194.
Wang, J., Liu, Z., Wu, Y., and Yuan, J. (2012). Mining Ac-
tionlet Ensemble for Action Recognition with Depth
Cameras. pages 1290–1297.
Yang, J., Xu, Y., and Chen, C. S. (1994). Gesture Inter-
face: Modeling and Learning. IEEE Proc Int Conf on
Robotics and Automation, pages 1747–52 vol.2.
Yao, B. and Fei-Fei, L. (2010). Grouplet: A Structured Im-
age Representation for Recognizing Human and Ob-
ject Interactions. IEEE Proc CVPR, pages 9–16.
Yu, G., Liu, Z., and Yuan, J. (2015). Discriminative Orderlet
Mining for Real-Time Recognition of Human-Object
Interaction. Lec Notes in Comp Sci (AI & Bioinf),
9007:50–65.
VISAPP 2019 - 14th International Conference on Computer Vision Theory and Applications
164
