
Fuzzy-PID System Control for Tungsten Filament Heater of Thermal
Vacuum Evaporation
Dhidik Prastiyanto, Andi Suhono, Anis Fikri Azhari, Sugeng Purbawanto and Ulfah Mediati Arief
1
Department of Electrical Engineering, Universitas Negeri Semarang, E11 Building Kampus Sekaran Gunungpati
Semarang Indonesia
Keywords: Thermal vacuum evaporator, Fuzzy-PID controller, Heater control, Material deposition
Abstract: Vacuum coating is a solid material deposition technology that uses vacuum combustion using tungsten
filaments. The quality of material deposition depends on the heat distributed by the tungsten filament to the
material to be deposited. In this work, PID and Fuzzy-PID controller to control the heat of tungsten filament
is simulated. The Tungsten model is represented with transfer function in s-domain. Optimization of Fuzzy-
PID controller is done to obtain optimal heat of tungsten filament. Step and ramp responses of PID and PID-
Fuzzy controlled system were investigated. The result shows that the Fuzzy-PID reach faster steady state
compare to the PID system in the step response. The Fuzzy-PID also shows better performance in the ramp
response.
1 INTRODUCTION
Thermal evaporator is widely used for material
deposition (Khan et al., 2017). The challenge in
designing thermal evaporator is optimizing the heat
control so that uniform distribution of heat transfer
can be obtained. Automatic heater control can be
obtained by implementation of, Proportional Integral
Differential control (Asraf, Dalila, Hakim, & Hon,
2017), Fuzzy (Kobersi, Finaev, Almasani, & Abdo,
2013) (Singhala, Shah, & Patel, 2014), Adaptive
neuro fuzzy inference system ANFIS (Huang et al.,
2018) (Atia & El-madany, 2016) (Premkumar &
Manikandan, 2014), Genetic Algorithm and other
robust control system. PID controller is widely used
in many industrial applications for the effectiveness,
simplicity and clear functionality. However,
conventional PID is very sensitive with system
uncertainties so that the performance can decrease
with this problem. Optimization of PID parameter is
currently still an interesting topic (Kumar & Kumar,
2017) (Jung, Leu, Do, Kim, & Choi, 2015). Many
algorithms have been combined with PID such as
fuzzy and genetic algorithm.
In order to obtain fast and stable PID,
Fuzzy is implemented for optimizing PID parameter
(Ochoa & Forero, 2018) (Liu, Pan, & Xue, 2015)
(Lal, Barisal, & Tripathy, 2018) . The advantage of
Fuzzy that can solve some uncertainty of the system
is tried to be combined with the PID (Sahu, Pati,
Mohanty, & Panda, 2015). Fuzzy PID is also has been
also simulated in control system as in motor control
(Choi, Yun, & Kim, 2013) (Jung et al., 2015)[Choi
2015] and heater control (Ochoa & Forero, 2018)
(Atia & El-madany, 2016) .
Simulation of heater control using adaptive
PID have been done in (Ochoa & Forero, 2018). The
result shows that steady state is reached at arounf 30
s. Conventional structure of PID can be expanded
with the new algorithm (Liu et al., 2015) (Kumar &
Kumar, 2017). Some problem is still arise in this
hibryd PID due to the system uncertainties in the
experiment. Gradient descent algorithm was
implemented in (Kumar & Kumar, 2017). However
implementation in the experimental still need some
improvement.
388
Prastiyanto, D., Suhono, A., Azhari, A., Purbawanto, S. and Arief, U.
Fuzzy-PID System Control for Tungsten Filament Heater of Thermal Vacuum Evaporation.
DOI: 10.5220/0009011903880392
In Proceedings of the 7th Engineering International Conference on Education, Concept and Application on Green Technology (EIC 2018), pages 388-392
ISBN: 978-989-758-411-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
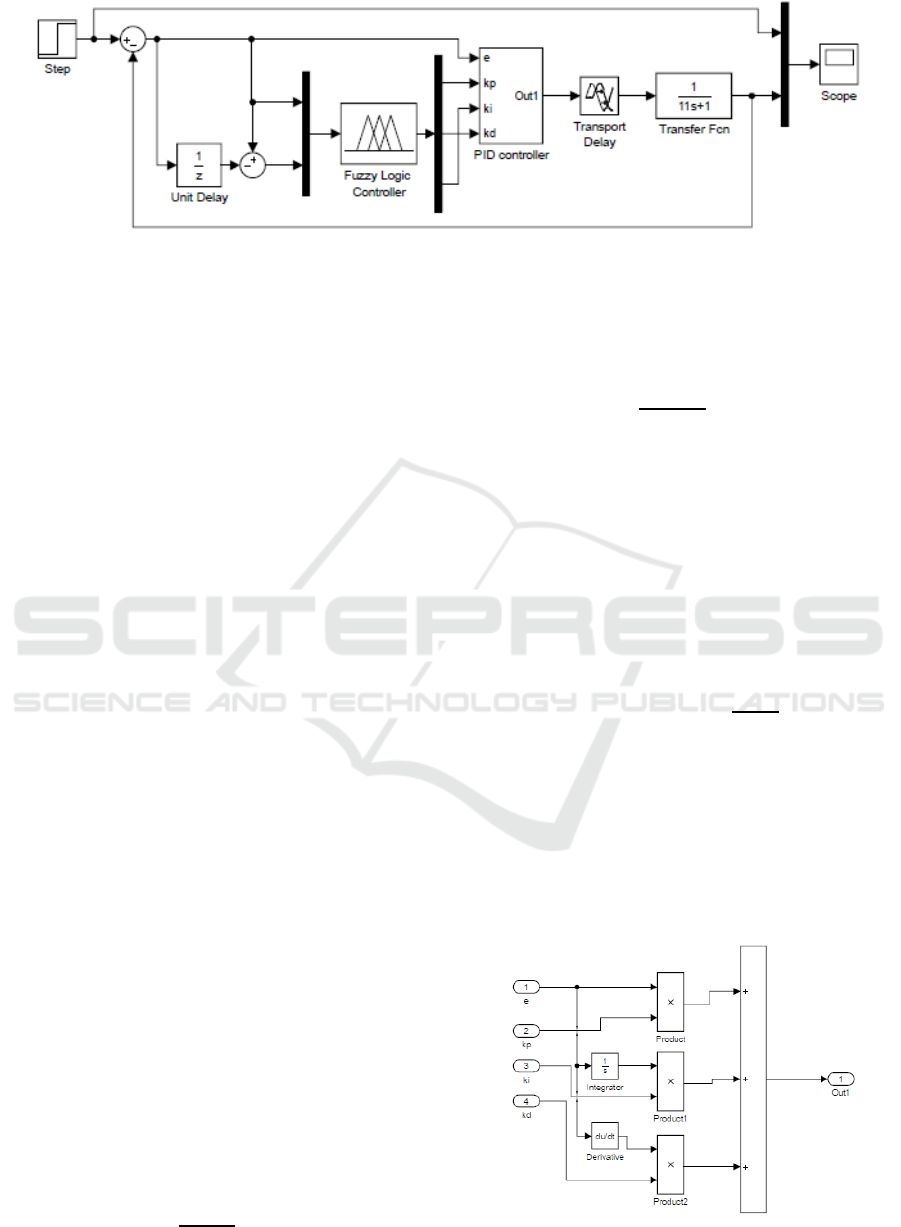
Figure 1: Fuzzy-PID control system.
In this work the Fuzzy PID is optimized for
heating system which is like in (Ochoa & Forero,
2018). The difference is that the characteristic of the
heater will be varied in order to test the adaptability
of the control system. By testing the proposed control
system for different characteristic of heaters, the
parameter will be optimized for different behaviour
of the system. The optimal parameter that works for
different system will overcome the uncertaintes of the
system in experiment. In order to increase the
performance of the control system, The characteristic
of the heater will also be confirm with the experiment.
Some adjusment will be needed in order to overcome
the system uncertanties which is omitted in
simulation.
2 METHODS
The simulation model of system which is controlled
using PID-Fuzzy is shown in the Figure 1. The system
is controlled using PID controller. The parameter of
PID is tuned using fuzzy logic controller. As an input
of the fuzzy are the error and delayed error. The
system is tested using step signal and also ramp signal
to analyse the step and ramp response of the system.
The detail model is explained in the following
subsection:
2.1 Evaporator Model
As we know in the system theory, any plant can be
modelled using transfer function. The transfer
function is got from the Laplace transform of the
differential equation of the system. The model of
evaporator and heater which is used in this work is the
same with the model in (Ochoa & Forero, 2018):
1
(1)
With K, T and transport delay d are 1, 11 and 1.8 then
the equation 1 become:
1
111
.
(2)
The value of K, T and d depends on the heater or
evaporator that to be modelled.
2.2 PID Controller
PID controller is the most common controller in
industry.
(3)
The output of PID is driven by the error of reference
compared to the output of the system as stated in
equation 3. The PID parameters will influence the
performance of the control system.
In MATLAB PID can simply applied with
toolbox or can be applied with the following block
diagram as shown in Figure 2.
Figure 2: Block diagram of PID in Simulink.
Fuzzy-PID System Control for Tungsten Filament Heater of Thermal Vacuum Evaporation
389
2.3 Fuzzy Controller
Fuzzy inference system works based on set of rules
which is called as membership function. The
membership function set the relationship between
input and output of the fuzzy controller
(Vasičkaninová, Bakošová, Mészáros, & Oravec,
2015). Membership function in this works consists of
two input which is error and derivative of error. The
output will be Kp, Ki and Kd which are proportional,
integral and differential constants. In (Liu et al., 2015)
the output are PID parameters and additional
parameter od integration order and derivative order
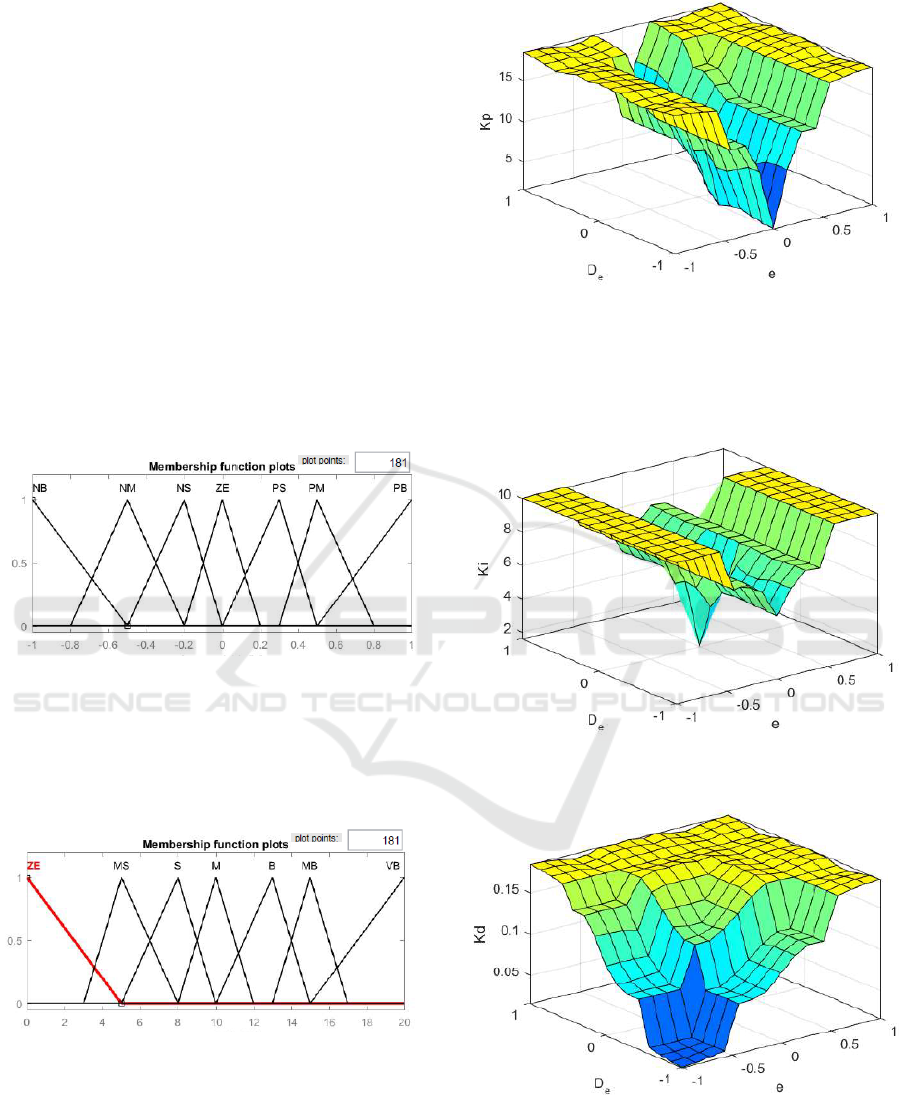
µ. The membership function of input is shown in
the Figure 3. The input is classified into negative big
(NB), negative medium (NM), negative small (NS),
zero (ZE), positive small (PS) positive medium (PM)
and positive big (PB).
Figure 3: Membership function plot of input.
Membership function of output is shown in Figure 4. The
output is classified as zero (ZE) medium small (MS), small
(S), medium (M), big (B), medium big (MB) and very big
(VB)
Figure 4: Membership function plot of input.
The relationship between input e and D_ and output Kp, Ki
and Kd are presented in Figure 5, Figure 6, and Figure 7
respectively. The error and derivative or error decide the
magnitude of theses PID Parameters as shown in the surface
views.
Figure 5: Surface view of input - output Kp.
The error and derivative of error as input of fuzzy will be
processed with FIS to decide the output of the Fuzzy
controller.
Figure 6: Surface view of input - output Ki.
Figure 7: Surface view of input - output Kd.
The membership function might be optimized in order to
get the fast response and stability of the control system.
EIC 2018 - The 7th Engineering International Conference (EIC), Engineering International Conference on Education, Concept and
Application on Green Technology
390
3 RESULTS AND DISCUSSION
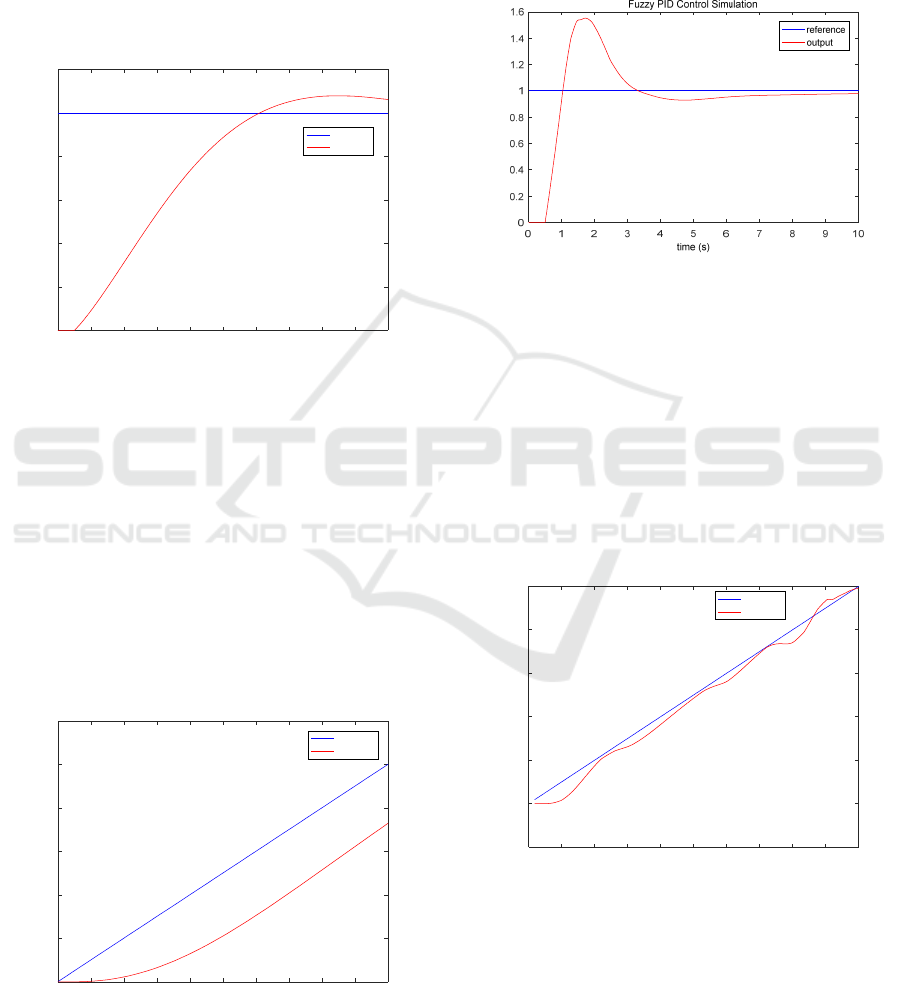
Step response is investigation of the response of the
system with step input. This response is very
important because usually, thermal evaporator is
applied with the constant high temperature depends
on the material. In the Figure 8, step response of the
PID controlled system is presented:
Figure 8: Step response of PID controlled system.
The system needs time to reach desired
temperature. In the figure the step response show that
the rise time is around 6 s and settling time more than
10 s respectively. It is faster compared to the result in
(Ochoa & Forero, 2018) which is reached at around
20 s.
The response of the system with ramp signal
input is presented in Figure 9. The ramp response is
analysed to observe the behaviour of the system if the
user wants to get the increased temperature of the
thermal evaporator
Figure 9: Ramp response of PID controlled system.
The result show that the output is not able to reach the
increased desired temperature. This overshoot might
be overcome by increasing the value of derivative
constant.
Step response of Fuzzy-PID control system is
presented in Figure 10.
Figure 10: Ramp response of PID controlled system.
The figure shows that there is some overshoot before
the system reach steady state. The rise time of the
control system is approximately 0.6 s which is very
fast compared to (Asraf et al., 2017) and (Ochoa &
Forero, 2018). The settling time is around 7 s which
are faster than conventional PID and the settling times
in (Asraf et al., 2017) and (Ochoa & Forero, 2018).
However the overshoot is bigger compare the result
in (Ochoa & Forero, 2018).
The ramp response of Fuzzy-PID control
system is shown in Figure 11.
Figure 11: Ramp response of PID controlled system.
Comparing with PID control, the Fuzzy-PID can
control the system with ramp signal as desired
temperature. In the thermal evaporator, the increasing
temperature to some constant value is important so
that the high temperature value can be reached faster.
012345678910
time (s)
0
0.2
0.4
0.6
0.8
1
1.2
temperature (C)
Simulasi PID Dengan Step Respon
reference
output
012345678910
time (s)
0
2
4
6
8
10
12
temperature (C)
Simulasi PID Dengan Ramp Respon
reference
output
temperature (C)
012345678910
time (s)
-2
0
2
4
6
8
10
temperature (C)
Fuzzy PID Control Simulation
reference
output
Fuzzy-PID System Control for Tungsten Filament Heater of Thermal Vacuum Evaporation
391

4 CONCLUSIONS
Simulation of control system for evaporator have
been done. The result shows that PID-fuzzy reach
faster rise and settling time on the step response
compare to the PID control system. The ramp
response show that the control system is able to adjust
the output in-line with the desired temperature. The
future work is finishing experimental setup which
implement the simulation result and do experiment of
deposition with the thermal evaporator.
ACKNOWLEDGEMENTS
We would like to thanks to Faculty of Engineering
UNNES for providing research grant for this work.
REFERENCES
Asraf, H. M., Dalila, K. A. N., Hakim, A. W. M., &
Hon, R. H. M. F. (2017). Development of
Experimental Simulator via Arduino-based PID
Temperature Control System using LabVIEW.
Journal of Telecommunication, Electronic and
Computer Engineering, Vol 9(1–5), 53–57.
Atia, D. M., & El-madany, H. T. (2016). Analysis and
design of greenhouse temperature control using
adaptive neuro-fuzzy inference system. Journal
of Electrical Systems and Information
Technology, Vol 4(1), pp 34-48
Choi, H. H., Yun, H. M., & Kim, Y. (2013).
Implementation of Evolutionary Fuzzy PID
Speed Controller for PM Synchronous Motor,
(c), Vol 11(2), pp 540-547
Huang, H., Zhang, S., Yang, Z., Tian, Y., Zhao, X.,
Yuan, Z., … Wei, Y. (2018). Modified Smith
fuzzy PID temperature control in an oil-
replenishing device for deep-sea hydraulic
system. Ocean Engineering, 149(November
2017), Vol 149, 14–22.
Jung, J., Leu, V. Q., Do, T. D., Kim, E., & Choi, H.
H. (2015). Adaptive PID Speed Control Design
for Permanent Magnet Synchronous Motor
Drives. IEEE Transactions on Power
Electronics, Vol 30(2), pp 900–908.
https://doi.org/10.1109/TPEL.2014.2311462
Khan, I. A., Amna, N., Kanwal, N., Razzaq, M.,
Farid, A., Amin, N., … Ahmad, R. (2017). Role
of oxygen pressure on the structural,
morphological and optical properties of c -Al
2
O
3
films deposited by thermal evaporator.
Materials Research Express, Vol 4(3), 036402.
Kobersi, I. S., Finaev, V. I., Almasani, S. A., & Abdo,
K. W. A. (2013). Control of the heating system
with fuzzy logic. World Applied Sciences
Journal, Vol 23(11), 1441–1447. 13156
Kumar, A., & Kumar, V. (2017). A novel interval
type-2 fractional order fuzzy PID controller:
Design, performance evaluation, and its
optimal time domain tuning. ISA Transactions,
Vol 68, pp 251–275.
Lal, D. K., Barisal, A. K., & Tripathy, M. (2018).
Load Frequency Control of Multi Area
Interconnected Microgrid Power System using
Grasshopper Optimization Algorithm
Optimized Fuzzy PID Controller. 2018 Recent
Advances on Engineering, Technology and
Computational Sciences (RAETCS), pp 1–6.
Liu, L., Pan, F., & Xue, D. (2015). Variable-order
fuzzy fractional PID controller. ISA
Transactions, Vol 55, pp 227–233.
Ochoa, G. V., & Forero, J. D. (2018). Fuzzy Adaptive
PID Controller Applied to an Electric Heater in
MATLAB / Simulink, Vol 11(58), pp 2849–
2856.
Premkumar, K., & Manikandan, B. V. (2014).
Adaptive Neuro-Fuzzy Inference System based
speed controller for brushless DC motor.
Neurocomputing, Vol 138, pp 260–270.
https://doi.org/10.1016/j.neucom.2014.01.038
Sahu, B. K., Pati, S., Mohanty, P. K., & Panda, S.
(2015). Teaching-learning based optimization
algorithm based fuzzy-PID controller for
automatic generation control of multi-area
power system. Applied Soft Computing
Journal, Vol 27, pp 240–249.
Singhala, P., Shah, D. N., & Patel, B. (2014).
Temperature Control using Fuzzy Logic.
International Journal of Instrumentation and
Control Systems (IJICS), Vol 4(1), pp 1–10.
Vasičkaninová, A., Bakošová, M., Mészáros, A., &
Oravec, J. (2015). Fuzzy controller design for a
heat exchanger. Intelligent Engineering
Systems (INES), 2015 IEEE 19th International
Conference On, pp 225–230.
EIC 2018 - The 7th Engineering International Conference (EIC), Engineering International Conference on Education, Concept and
Application on Green Technology
392
