
A Tandem Drone-ground Vehicle for Accessing Isolated Locations for
First Aid Emergency Response in Case of Disaster
Marcos Calle
1
, Jose Luis Andrade-Pineda
2
, Pedro Luis González-R
1
, Jose Miguel Leon-Blanco
1
and David Canca Ortiz
1
1
Department of Industrial Organization and Enterprise Management I, University of Seville,
Cº Descubrimientos, Seville, Spain
2
Robotic, Vision and Control Group, University of Seville, Cº Descubrimientos, Seville, Spain
Keywords: Genetic Algorithm, UAV, Humanitarian Mission, Disaster Area.
Abstract: The collapse of infrastructures is very often a complicating factor for the early emergency actuations after a
disaster. A proper plan to better cover the needs of the affected people within the disaster area while
maintaining life-saving relief operations is mandatory hence. In this paper, we use a drone for flying over a
set of difficult-to-access locations for imaging issues to get information to build a risk assessment as the
earliest stage of the emergency operations. While the drone provides the flexibility required to visit
subsequently a sort of isolated locations, it needs a commando vehicle in ground for (i) monitoring the
deployment of operations and (ii) being a recharging station where the drone gets fresh batteries. This work
proposes a decision-making process to plan the mission, which is composed by the ground vehicle stopping
points and the sequence of locations visited for each drone route. We propose a Genetic Algorithm (GA)
which has proven to be helpful in finding good solutions in short computing times. We provide experimental
analysis on the factors effecting the performance of the output solutions, around an illustrative test instance.
Results show the applicability of these techniques for providing proper solutions to the studied problem.
1 INTRODUCTION
The collapse of infrastructures is very often a
complicating factor for the emergency actuations
after a disaster. In the case of developing countries,
this leads to the appearance of isolated areas to be
provided with first healthcare aid. For instance, it is
sometimes necessary to send blood supplies to the
injured in their spots instead of bringing them to the
hospitals for blood infusions (Wen et al., 2016). In
view of the lack of trained pilots as well as helicopters
and land-based local personnel in the disaster areas
(Rabta et al., 2018), humanitarian organizations are
more and more incorporating Unmanned Aerial
Vehicles (UAVs) or drones in their supply of life-
saving commodities such as blood (Wen et al., 2016)
or pharmaceuticals.
By using UAVs, they can also get a quick and
flexible access to certain locations of interest, aiming
at collecting crucial information for the ulterior
efficient development of the emergency mission
itself. Aside from overcoming the accessibility issues,
UAVs can be useful for reducing the worker exposure
to danger (e.g. in structural integrity assessment after
an earthquake or in gauging radiation levels in a
nuclear accident (Greenwood, 2015)).
The maximal operation time or endurance for an
UAV depends on a variety of factors, such as the type
of drone (fixed wing vs. rotorcraft), the flying altitude
(e.g., propellers of rotor-crafts must rotate faster at
higher altitudes because of lower air density), the
weather conditions and obviously, the weight of the
UAV.
In this work, we propose using a UAV consisting
of a multirotor system that will be operated with
battery swaps to overcome the endurance limitation.
The UAV will fly over a set of challenging locations
for imaging them with the purpose of collecting
information to make a risk assessment as the earliest
stage of the emergency operations. We will suppose
the UAV is equipped to acquire the needed images of
the difficult-to-access locations, although this
research focuses not in the imagery itself, but in the
optimization of the completion time for the quick
recognisee of the target locations. This differs from
other reported studies in the emergency literature
Calle, M., Andrade-Pineda, J., González-R, P., Leon-Blanco, J. and Ortiz, D.
A Tandem Drone-ground Vehicle for Accessing Isolated Locations for First Aid Emergency Response in Case of Disaster.
DOI: 10.5220/0007230702890296
In Proceedings of the 10th International Joint Conference on Computational Intelligence (IJCCI 2018), pages 289-296
ISBN: 978-989-758-327-8
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
289

where the challenge is in getting the consecutive
overlapping of aerial images to build an up-to-date
map of a wide area (Qi et al., 2016). We are more
interested in analysing the combination of UAVs and
alternative means of transport in difficult-to-access
areas, which with certain exceptions (Mosterman et
al., 2014), (Chowdhury et al., 2017), remains
relatively unexplored.
2 PROBLEM DESCRIPTION
The UAV provides us with the flexibility required to
visit subsequently a subset of locations (namely, a
route), although for practical convenience, an
individual would be on charge of monitoring and
controlling the flight operations. Thus, we assume
that a ground vehicle (GV) will act as a commando
vehicle.
The number of target locations to visit on each
flight is clearly limited to the capacity (power) of the
batteries in the UAV. Our assumption is that the GV
will further play the role of recharging station, so that
at the end of each of its sorties the UAV will land on
it for battery swaps. Aside from being conditioned by
the total weight on board (see Figure 1 for an example
of an energy consumption pattern), it is noticeable
that the number of locations that the UAV is able to
visit on each sortie is also limited because of the
capacity of the data storage device used for recording
the imagery task.
Our problem can shortly be described as how best
defining the routing planning for the tandem UAV-
GV used to deploy the recognisee task.
Figure 1: Power pattern in an hexacopter UAV,
approximately linear with the total load on board (Source:
(Dorling et al.,2017)).
In Figure 2, we sketch one of the flight routes of
our UAV in the studied scenario. As a first approxi-
mation to the constrained freedom of movements of
the GV in the disaster area, our assumption is that the
GV just moves along a straight line between two
points.
Observe that the route consists of the UAV’s take-
off from the GV, its visit to a subset of the planned
locations (circles) and its flight to intercept the GV
trip with the purpose of landing on it and swapping its
batteries. In the while, the GV has been moving along
the practical road (between rectangles).
Figure 2: Target Scenario: UAV and GV moves separately.
The dashed lines represent fly paths for UAV.
In spite of the sketched example, it is possible that
a launch and a rendezvous of the UAV occurs at the
same point. Namely, the GV is allowed to stay at a
position for a time while the UAV complete a route
visiting a variety of sites, if the optimization analysis
found it convenient for the general objective of
minimizing the time to accomplish the whole task.
This differs from many of the tandem UAV-GV
approaches in the literature, which mainly turn
around the commercial supply chain context with a
last-mile delivery based on UAVs. There are very few
works considering UAV load capacity greater than
one (Luo, et al., 2017), (Rahman, 2017), thereby more
than one parcel allowed for serving a certain
customer. The fact that the GV can move the UAV
between two deployment locations such that it does
not spend any energy is a feature that is sometimes
considered in such a literature. For instance, (Mathew
et al., 2015) assume the UAV travelling through a
street network joint to a truck as GV till the tandem
gets nearby a customer’s doorstep, when the UAV fly
to deliver parcels one customer at a time. Differently,
(Ha et al., 2018) allows UAV’s route comprised of
several customers, excluding the possibility to have a
launch and rendezvous in the same point though. The
latter is allowed in (Mathew et al., 2015) and in the
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
290

closely related work by (Bin Othman et al., 2017),
although none of them considers that the UAV can
visit a set of customers in a single flight mission, as is
required in our scenario. Nevertheless, the last three
referenced works apply a Travelling Salesman
Problem with Drone (TSP-D) approach that is
relevant to our research. The name TSP with drone is
first used in (Agatz et al., 2016) referring to the
problem in which a drone helps a traditional transport
system like a truck or a van in the delivery of goods.
3 PLANNING DECISIONS
The proposed decision-making process to plan our
imagery mission covering all the difficult-to-access
locations would provide the following:
The GV stopping points, with the arriving time
and for how long the GV stays at it.
The sequence of locations visited for each UAV’s
route, the start point for every route –i.e. the point
in take-off- and its landing point.
The details of the hitch and ride of the UAV over
the GV (namely, when the UAV travels carried on
the GV while it moves from a position to another).
We approach it using a multiple travelling salesman
problem (mTSP) baseline: the target locations
(henceforth referred to as “customers”) which have to
be visited by a number of routes. According to the
mTSP terminology (Bektas, 2006), our case study
concerns to the ‘nonfixed destination case within the
multiple depot variation of mTSP’, since the UAV
can either return to the starting GV position (at which
the UAV taken off) or to a different ending position.
3.1 Assumptions
We first introduce the notation for the input
parameters used within our planning problem:
: Customers to visit;
: Euclidean distance between two positions;
: Maximum number of customers that can be
‘mapped’ before running out of the storage
memory;
: UAV flight speed;
: GV moving speed;
: Endurance or maximum flight time;
Then, we list certain assumptions we make to
simplify our analysis.
Firstly, that the road travels of GV and the UAV
flight between locations occur both at constant speed.
The latter comes from our assumption that the energy
consumed during the emergency mission is
approximately the same as that consumed during
hover (Dorling et al., 2017).
Secondly, that the extreme points for each route
are taken from stopping positions for the GV (which
moves only along the straight road depicted in Figure
2).
Thirdly, that we have to manage the
synchronisation of GV and UAV. Specifically, we
assume that the GV opening time at a certain position
occurs always before than the arrival of the UAV
planned for landing on this position. Namely, that the
UAV’s end of route is planned so that it does not have
to wait for the arrival of the GV.
Finally, notice that the minimum number of routes
that may arise is
/
. However, depending on the
distance of flight paths, the limited endurance could
force a route to be serving to less than H customers.
From it, the worst case is that every route was only
serving one customer, and hence the valid set of route
indices are:
∈
,…,
(1)
Although the assumptions considered in this work
have been considered individually in the literature, it
is noteworthy the novelty of considering them in a
joint way in the same problem.
3.2 Variables
Let
be a binary variable indicating that the
route visits node immediately after node .
Besides, assume that the visiting sequence order of
the customers served by a certain route is μ
. As we
explain below, these ordering variables are used for
subtour eliminations.
Let
be the time at the take-off of the UAV on
its route , and
the land time for the UAV flight
from the customer as the last flight of route . In
order to be ready to check endurance, let us consider
the cumulative flight time of the UAV when arrive at
the node , denoted
, and the total flight time for
the whole route accounting for the final flight from
the last customer to the GV, denoted
. Let
be the arrival time for the GV at the
interception point at which the route is terminating.
Finally let
be the time the GV stay at this
stopping point.
3.3 Constraints
A route cannot terminate at a customer.
Each customer must be visited just once, belong-
A Tandem Drone-ground Vehicle for Accessing Isolated Locations for First Aid Emergency Response in Case of Disaster
291

ing to only one route.
There is exactly one input flight and exactly one
output flight from every customer visited by a
route.
The endurance is an upper bound for the
cumulative flight time variables
and
.
The early arrival time for the UAV is treated as a
hard constraint. Thus, if
, then node
cannot be part of the route , since the GV is not
ready at time.
The early leave time for the GV from the take-off
point under study is treated as a hard constraint. If
, then the GV is not
ready to be the take-off point for the UAV on its
route, since the GV has left.
The subtour elimination constraint, which can be
written using as follows:
μ
μ
1,
, ∈ , , ∈
(2)
3.4 Methodological Proposal
Deriving from the previous discussed issues, the
planning for covering the set of challenging locations
will emerge from solving a MILP formulation with
similarities to the non-fixed destination multiple
depot m-TSP minimizing the Total Mission Time
(TMT).
We recall here that the mTSP is a relaxation of the
Vehicle Routing Problem (VRP), being well-known
that this problem is NP-Hard (Bektas, 2006). In the
VRP literature there are many solution approaches
initially valid for the mTSP, but they may not be
efficient to the mTSP.
Precisely, we have focused our research in getting
quick good solutions to the practical decision problem
studied. To this aim, we have developed a Genetic
Algorithm (GA) tailored for our case study.
4 GA
A Genetic Algorithm (GA), as proposed by Holland
(1975), is a population-based metaheuristic inspired
by the evolution of species. The algorithm starts with
a population of randomly generated solutions (each
solution represented by a chromosome), and then
continues with a procedure to improve the candidate
solutions obtained generation after generation, by
using selection, crossing and mutation operators. The
improvement of the solutions occurs when a lower
value for a fitness function arises. The variable TMT
is the fitness to evaluate a solution in our problem,
evaluated by finding the time when the UAV-GV
tandem arrives to the end of the road, after all
customers have been visited.
In general, a GA is an unconstrained method,
which usually handles constraints by penalizing the
objective function. In our case, the constraints not
included in the calculation of TMT are those relating
to:
The maximum number of customers per route
The maximum flight time or endurance,
The time that the UAV is waiting for the GV
arrival at the rendezvous location.
The total moving time of the UAV-GV tandem.
Next, we detail our GA implementation, where the
objective function is to minimize the TMT, defined as
the summation of the cumulative flight time of the
UAV and cumulative moving time of the UAV-GV
tandem.
4.1 Coding Scheme
The chromosomes in our study are comprised of 3
genes.
The first components are devoted to code the
position of the take-off point for each route (which
would be contained in the straight road in Figure 2),
measured from the origin,
. Next components
are the distance specification of the selected landing
points,
. The last components define the route
assigned to serve each customer,
. Thus, we code
each solution according to the following structure:
.
,…
,
,…
,
,…
(3)
Thus, each chromosome is explicitly representing the
take-off and rendezvous points for routes and the
assignment of routes to each customer. Nevertheless,
other performance details such as the number of
routes, the time at which the GV arrive at a point and
the lapse time spent there, implicitly are also
contained into it.
4.2 Pseudo-code
The pseudo-code for the GA can be resumed in
pseudocode (algorithm 1):
1: generate population of candidate solutions
2: compute fitness of candidate solutions
3: while termination criterion is false
4: generate children solutions by crossover
5: mutate children solutions
6: compute fitness of new candidate solutions
7: replace parent solutions
8: return best solution
Algorithm 1: Pseudo-code of the Genetic Algorithm.
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
292
At line 1, the candidate solutions are randomly
initialized over the entire search space. Prior to the
first iteration of the GA, the algorithm evaluates the
candidate solutions of the generated population, at
line 2. After a fixed number of iterations (that were
experimentally determined to get good solutions
within reasonable computing time), a termination
criterion is applied at line 3.
The crossover operation is the first step at every
iteration of the GA, involving two parent solutions
and generating two child solutions (at line 4). In fact,
three variants of this two-point crossover have been
implemented in our algorithm: a crossover variant for
the take-off points of the flights, a crossover variant
for the rendezvous locations of the flights, and a
crossover variant for the assignments of the
customers to the UAV flights. Then, the algorithm
proceeds with the application of a mutation operator
on the children solutions (at line 5), by inverting a
subsection of the mutating solution. Again, three
different mutation operations have been implemented
depending on whether we were mutating the take-off
points of the flights, the rendezvous locations of the
flights, or the assignments of the customers to the
UAV flight missions. Once done the evaluation of the
new candidate solutions generated at the concerned
iterations (at line 6), the algorithm proceeds to replace
the parent solutions by the children solutions (at line
7). We apply elitism, where the n best solutions of the
parents’ generation replace the worst solutions of the
children’s generation.
4.3 Implementation
We have implemented this algorithm with Python 3
programming language with the help of the
evolutionary algorithm toolkit DEAP (Fortin et al.,
2012), an abbreviation for ‘Distributed Evolutionary
Algorithms in Python’. DEAP is an evolutionary
computation framework that allows rapid prototyping
of diverse genetic algorithms, including genetic
algorithms, genetic programming, evolution
strategies, covariance matrix adaptation evolution
strategy, particle swarm optimisation, and many
more.
In our GA, the data set obtained after assessing a
particular solution consists of (a) the best visiting
sequence of the customers assigned to each flight, (b)
the flight time of the UAV for each flight, (c) the
waiting time of the GV for each flight, and (d) the
total moving time of the UAV-GV tandem.
In order to test our solution approach, we have
used clouds of spread locations taken from the
clients’ position within Capacitated VRP benchmark
instances. For example, the CVRPLIB - Capacitated
Vehicle Routing Problem Library.
In what follows, we present the performance
obtained when tackling with the A-n32-k5 instance
proposed by Uchoa et al., (2014).
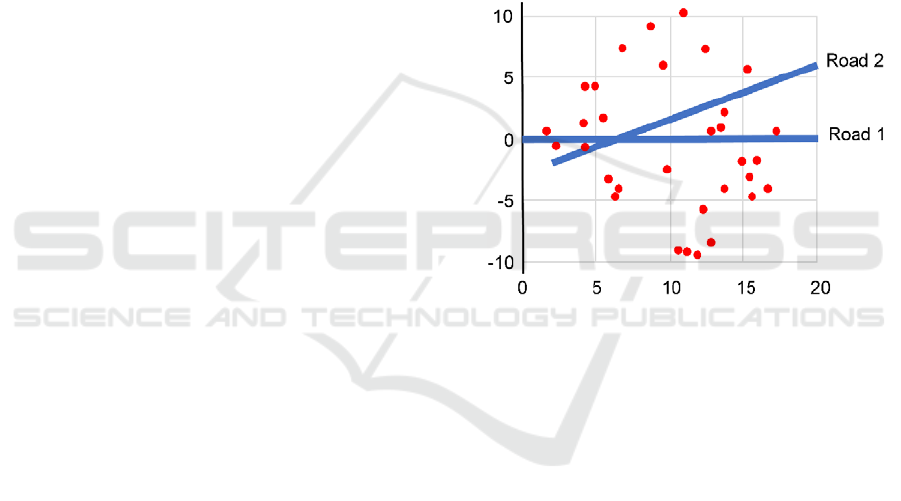
We have studied the possible influence of three
factors. To study the influence of the customers
layout, two different roads have been included in the
first factor, (see Figure 3). As the second factor, two
different UAV speeds have been studied, (a) =20
km/h and (b) =30 km/h. In both cases, the GV and
UAV-GV tandem moves at same speed, which is
=60 km/h. As the third factor, we have studied three
different values for the maximum number of visits in
each route: H=3,4,5. The endurance of the UAV is in
all the cases limited to E=1.2 hours.
Figure 3: Problem layout.
The GA implemented in this study starts with an
initial population of 100 solutions randomly
generated, and it stops after 100 generations. We have
repeated this for 30 runs, and written down the
average times of best solution over the 30 runs. Each
of the formerly described mutation operator is applied
to each of the three components with a probability of
a 2%. Similarly, each of the mentioned crossover
operators is applied with a 50% probability.
5 COMPUTATIONAL RESULTS
This section presents the results obtained by the
proposed GA.
Table 1 contains the averages of 30 runs of the
algorithm for each combination of problem
parameters, namely, road configuration, UAV flying
speed and maximum number of visits in each route.
This makes 360 runs. The ‘Mission time’ caption
refers to the TMT, expressed as the hours passed
between the depart from the origin of the road and the
A Tandem Drone-ground Vehicle for Accessing Isolated Locations for First Aid Emergency Response in Case of Disaster
293
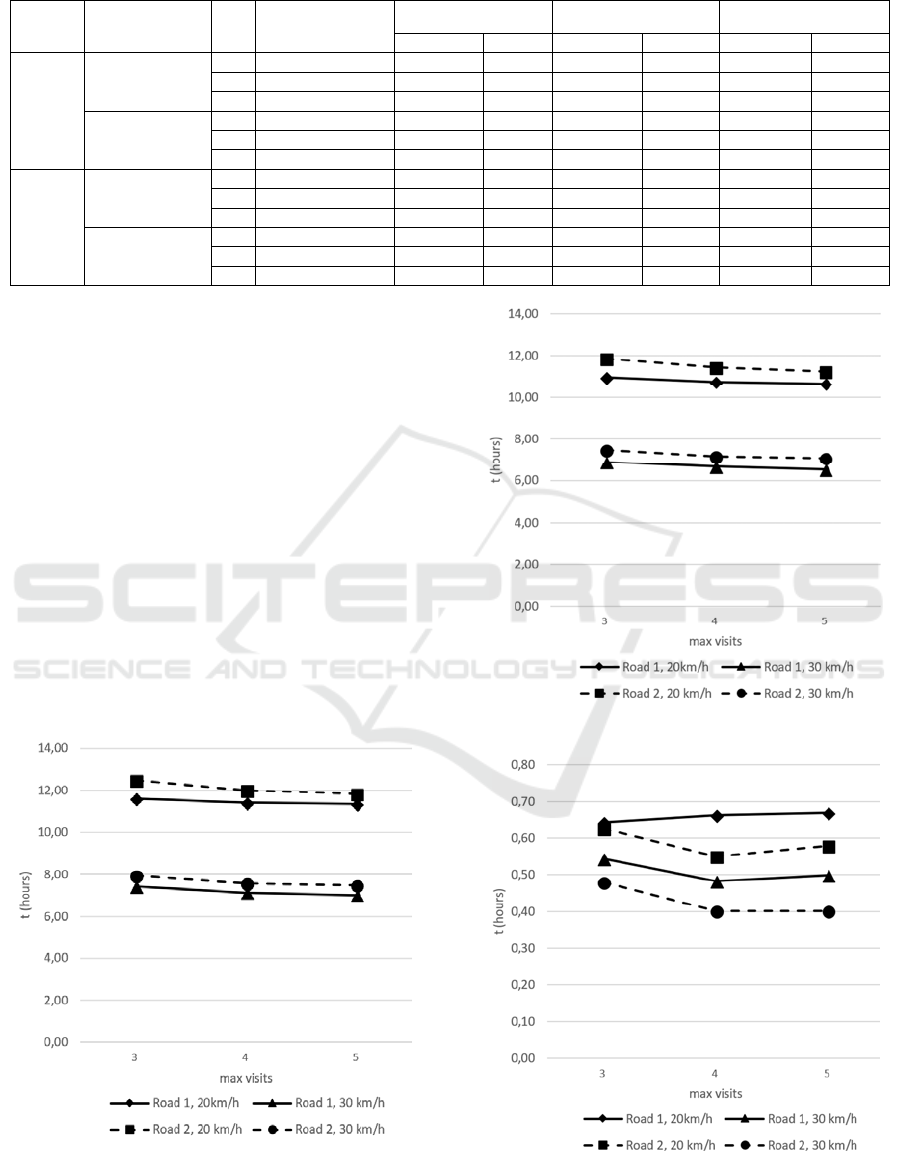
Table 1: Summary of experimental average results.
Road
UAV speed
(km/h)
H
Mission time
(hours)
Tandem time UAV flight time GV waiting time
(hours) % (hours) % (hours) %
1
20
3 11.60 0.64 5.54 10.96 94.46 10.78 92.89
4 11.41 0.66 5.81 10.74 94.19 10.56 92.60
5 11.34 0.67 5.89 10.68 94.11 10.47 92.30
30
3 7.43 0.54 7.33 6.88 92.67 6.69 90.00
4 7.14 0.48 6.77 6.65 93.23 6.46 90.49
5 7.02 0.50 7.11 6.52 92.89 6.32 90.06
2
20
3 12.49 0.63 5.01 11.86 94.99 11.68 93.57
4 12.00 0.55 4.58 11.45 95.42 11.27 93.91
5 11.82 0.58 4.90 11.24 95.10 11.07 93.65
30
3 7.95 0.48 6.04 7.47 93.96 7.29 91.77
4 7.57 0.40 5.30 7.17 94.70 7.01 92.63
5 7.49 0.40 5.35 7.09 94.65 6.94 92.66
arrival of the GV carrying the UAV to the end of the
road. The ‘Tandem time’ caption refers to the total
average traveling time of the GV carrying the UAV
and the percentage it weights in total mission time.
The ‘UAV flight time’ caption presents the average
total flying time of the UAV. The ‘GV waiting time’
caption shows the average total time that the GV
spends waiting for the UAV. Observe we have
included the percentage referred to the TMT value,
thereby allowing for quickly reading the weights of
Tandem time, UAV flight time and GV waiting time.
We further include illustrations for the four time
columns in Table 1.
Figure 4 shows total mission time for each
scenario. Figure 5 shows the average UAV flight time
vs . Figure 6 shows variability in the time spent by
the GV-UAV tandem, in their short travels between
flights.
Figure 4: Average total mission time vs .
Figure 5: UAV average total flying time vs .
Figure 6: GV-UAV tandem average total traveling time.
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
294

Finally, Figure 7 shows the total time that the GV
spends waiting for the UAV return (once deployed
the recognisee route). Noticeably, the GV is most of
time in the status ‘stopped’.
Figure 7: GV average total waiting time.
As shown in the results, the factors (a) the UAV
speed and (b) the maximum number of visits in each
route influence the planning, and therefore the
resulting TMT. Thus, as the UAV speed increases
and/or the number of visits is less restricted, the value
TMT is reduced.
In these scenarios, the moving time of the UAV-
GV tandem is significantly low, between 5% and 7%
of the total mission time, so the moving speed of the
GV is not the most influential issue on the total
mission time. This implies that the UAV flight speed
is the most relevant factor on the total mission time,
which ranges from 93% to 95% of the mission time.
The relevance of the UAV speed justifies the need to
continue the research line of planning optimization of
these missions.
As a final remark, we notice that the studied
scenarios exhibit long waiting times for the GV at
rendezvous locations, which ranges from 90% to 94%
of the total mission time.
6 CONCLUSIONS
In this work, we propose using an UAV to visit a set
of challenging locations in a humanitarian mission, in
tandem with a GV for monitoring and controlling the
flight operations, which is used as well as a
recharging station for restoring the endurance of the
UAV. To solve the problem of planning the tandem’s
operations, we have implemented a GA algorithm
able to find good quality solutions in reasonable
computing times. The algorithm has been
programmed using Python 3 and DEAP library.
This work has considered a set of practical
considerations: (1) the limitations of the GV to access
the locations to visit, and (2) the different limitations
imposed by the drone in this type of missions. This
set of limitations does not allow us for comparing the
results obtained in this work with other nearby
approaches proposed in the literature.
Although the results are promising, we need to
improve different aspects to incorporate more
constraints that bring the problem closer to reality,
such as considering the aerodynamics. The obtained
results highlight the high relevance of the UAV flight
speed in this mission type, which justifies the need to
continue the research line of planning optimization of
these missions. Next step in this research consists in
employing other methods, such as PSO, which results
could be compare with the current results.
ACKNOWLEDGEMENTS
This research has been supported by the VI Plan
Propio de Investigación y Transferencia de la
Universidad de Sevilla, under the project DADS:
Sistemas Avanzados de Distribución Basados en
Drones.
REFERENCES
Agatz, N., Bouman, P., Schidt, M. 2018. Optimization
Approaches for the Traveling Salesman Problem with
Drone. Transportation Science, vol. April, 2018.
Bektas, T. 2006. The multiple traveling salesman problem:
An overview of formulations and solution procedures.
Omega, vol. 34, no. 3, 209–219.
Bin Othman, M. S. bin, Shurbevski, A., Karuno, Y., &
Nagamochi, H. 2017. Routing of Carrier-vehicle
Systems with Dedicated Last-stretch Delivery Vehicle
and Fixed Carrier Route. Journal of Information
Processing, vol. 25, pp. 655–666.
Chowdhury, S., Emelogu, A., Marufuzzaman, M., & Nurre,
S. G. 2017. Drones for disaster response and relief
operations: A continuous approximation model. Intern.
Journal of Production Economics, vol. 188, no.
February, pp. 167–184.
Dorling, K., Heinrichs, J., Messier, G. G., & Magierowski,
S. 2017. Vehicle Routing Problems for Drone Delivery.
IEEE Transactions on Systems, Man, and Cybernetics:
Systems, vol. 47, no. 1, pp. 70–85.
A Tandem Drone-ground Vehicle for Accessing Isolated Locations for First Aid Emergency Response in Case of Disaster
295

Drones for Disaster Response and Relief Operations. 2015,
(April). Measure & American Red Cross.
Fortin, F.A., De Rainville, F.M., Gardner, M.A., Parizeau,
M., & Gagné, C. 2012. DEAP: Evolutionary
Algorithms Made Easy. Journal of Machine Learning
Research, vol. 13, pp. 2171-2175.
Greenwood, F., 2015. Above and Beyond: Humanitarian
Uses of Drones. World Politics Review. Available from:
http://www.worldpoliticsreview.com/articles/16750/ab
ove-and-beyond-humanitarian-uses-of-drones
[Accessed 30/07/18].
Ha, Q. M., Deville, Y., Pham, Q. D., & Hà, M. H. 2018. On
the min-cost Traveling Salesman Problem with Drone.
Transportation Research Part C: Emerging
Technologies, vol. 86, pp. 597–621.
Holland, J., 1975. Adaptation in Natural and Artificial
Systems. University of Michigan Press.
Luo, L., Liu, Z. & Shi, J., 2017. A Two-Echelon Cooperated
Routing Problem for a Ground Vehicle and Its Carried
Unmanned Aerial Vehicle. Sensors, vol. 17, no. 5, pp.
1-17.
Mathew, N., Smith, S. L., & Waslander, S. L. 2015.
Planning Paths for Package Delivery in Heterogeneous
Multirobot Teams. IEEE Transactions on Automation
Science and Engineering, vol. 12, no. 4, 1298–1308.
Mosterman, P. J., Sanabria, D. E., Bilgin, E., Zhang, K., &
Zander, J., 2014. A heterogeneous fleet of vehicles for
automated humanitarian missions. Computing in
Science & Engineering, vol. 16, no. 3, pp. 90-95.
Qi, J., Song, D., Shang, H., Wang, N., Hua, C., Wu, C., …
Han, J. 2016. Search and Rescue Rotary-Wing UAV
and Its Application to the Lushan Ms 7. 0 Earthquake.
Journal of Field Robotics, vol. 33, no. 3, pp. 290–321.
Rabta, B., Wankmüller, C., & Reiner, G. 2018. A drone
fleet model for last-mile distribution in disaster relief
operations. International Journal of Disaster Risk
Reduction, vol. 28, pp.107–112.
Rahman, M. M., 2017. Two-Echelon Vehicle Routing
Problems Using Unmanned Autonomous Vehicles.
Ph.D. thesis. North Dakota State University.
Ryan, J.L., Bayley, G., Moore, J.T., & Carlton, W.B. 2013.
Reactive Tabu Search in Unmanned Aerial
Reconnaissance Simulations. Journal of Chemical
Information and Modeling, vol. 53, no. 9, pp. 1689–
1699.
Uchoa, E., Pecin, D., Pessoa, A., Poggi, M., Subramanian,
A., & Vidal, T., 2014. New Benchmark Instances for
the Capacitated Vehicle Routing Problem.
Optimization Online, vol. 257, no 3, pp. 845-858.
Wen, T., Zhang, Z., & Wong, K. K. L. 2016. Multi-
Objective Algorithm for Blood Supply via Unmanned
Aerial Vehicles to the Wounded in an Emergency
Situation. PloS one, vol. 11, no. 5, pp. 1–22.
IJCCI 2018 - 10th International Joint Conference on Computational Intelligence
296
