
Kinematic Analysis of Hurdle Clearance using a Mobile Device
Bogusław Rymut
1
, Tomasz Krzeszowski
1
, Krzysztof Przednowek
2
,
Karolina H. Przednowek
2
and Janusz Iskra
3
1
Faculty of Electrical and Computer Engineering, Rzeszow University of Technology, Rzeszow, Poland
2
Faculty of Physical Education, University of Rzeszow, Rzeszow, Poland
3
Faculty of Physical Education and Physiotherapy, Opole University of Technology, Opole, Poland
Keywords:
Mobile Application Development, Human Motion Tracking, Particle Swarm Optimization, Hurdles Race.
Abstract:
This paper presents a human motion tracking method using a mobile device. The proposed method may be
used as a tool to measure hurdle clearance kinematic parameters and help coaches to evaluate the athlete’s
technique. The video recordings were made under simulated starting conditions of a 100 m women hurdle
race. Kinematic parameters were estimated based on an analysis of images sequence from a mobile device.
The images were recorded on a HTC M8s smartphone with a resolution of 1920x1080 pixels and with a
frequency of 30 Hz. The system was tested on two mobile development platforms and three image sequences.
The proposed method does not use any markers, special clothes or other estimation support techniques. The
analysis conducted showed that the smallest errors were calculated for the height of centre of mass, while the
biggest errors were observed for the bending angle of the knee of the trail leg.
1 INTRODUCTION
With the development of available technologies, we
can observe an increased interest in research concer-
ning the use of mobile applications in various areas of
life, e.g. activity classification (Mitchell et al., 2013),
fall detection (Shawen et al., 2017), light measure-
ment (Gutierrez-Martinez et al., 2017). One of the
potential applications is also the support of athletes’
training through the tracking and analysis of human
motion. Because of this, coaches have the ability to
evaluate the athlete’s technique and show where they
make mistakes.
Sport experts have been exploring a wide range
of applications for mobile platforms in the context
of athletes’ performance improvement (Yilmaz et al.,
2004; Baca et al., 2010; M
¨
oller et al., 2011; Kranz
et al., 2013; Weghorn, 2013; Koyama and Watanabe,
2014; Jensen et al., 2015; Xu et al., 2015; Weiler,
2016; Yamaguchi and Miura, 2016). For example,
the application named GymSkill (M
¨
oller et al., 2011;
Kranz et al., 2013) is a personal trainer. In this system
a smartphone placed on a balance board is used to
calculate the skill level of a particular exercise. Gym-
Skill provides feedback to the user with the goal of
tracking training quality and success, and to motivate
regular exercise. Baca et al. (Baca et al., 2010) de-
veloped a prototype system for monitoring, transmit-
ting and processing performance data in sports called
the Mobile Coaching System. Monitored athletes are
equipped with wireless sensors and a mobile device.
The system gathers biomechanical, physiological and
other sports related parameters. The measured data
is sent to the server and provided to experts. In turn,
these experts analyse the athlete’s performance and
return individual message feedback. Another paper
(Jensen et al., 2015) discusses an IMU-based mobile
system for golf putt analysis. The system performs
automatic putt detection using machine learning met-
hods. The calculation of parameters is performed in
real time. Simpson et al. (Simpson et al., 2017) ex-
amined the utility of a commercial application to in-
crease athlete knowledge and nutrition promoting be-
haviours. The study was conducted on a group of 17
New Zealand elite male field hockey players aged be-
tween 18 and 20. From a paper by (Xu et al., 2015),
the authors describe a sensing and mobile computing
system for classifying the foot angle profiles during
cycling. The system provides real-time guidance to
the user for achieving a correct profile. Yilmaz et
al. (Yilmaz et al., 2004) developed a method which
tracks the complete object regions, adapts to changing
visual features, and handles occlusions. Tracking is
achieved by evolving the contour from frame to frame
Rymut, B., Krzeszowski, T., Przednowek, K., Przednowek, K. and Iskra, J.
Kinematic Analysis of Hurdle Clearance using a Mobile Device.
DOI: 10.5220/0006933600490055
In Proceedings of the 6th International Congress on Sport Sciences Research and Technology Support (icSPORTS 2018), pages 49-55
ISBN: 978-989-758-325-4
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
49

by minimizing the proposed contour energy function.
The paper (Koyama and Watanabe, 2014) presents a
support system for golf swings consisting of percep-
tive sportswear and a mobile device. The wireless
mobile device receives motion data from the sport-
swear for monitoring body motion. Another applica-
tion (Weiler, 2016), called Ubersense, is a coaching
tool designed to help improve the technique and mo-
vement of the athlete. The application allows for the
analysis of any movement, such as running, throwing,
tennis serves or golf swings, these movement are re-
corded by a camera. The paper (Yamaguchi and Mi-
ura, 2016) describes a vision-based speed-measuring
method for baseball pitches. Authors have developed
a smartphone application that uses an image proces-
sing technique. Yeo and Sirisena (Yeo and Sirisena,
2017) proposed a mobile application for the analysis
of the walking and running gait. The application has
been named Simi Move. The user is required to mark
the positions of individual joints of the human body
on every frame. On that basis, the angles between the
individual parts of the body and their length are calcu-
lated. After that the user may perform a gait analysis
frame by frame.
From a review of the literature, it may be seen that
there is a need to create tools that can be used to sup-
port coaches in the training process and can be taken
everywhere. The main contribution of this paper is
therefore to develop a human motion tracking met-
hod that can be deployed and run on a mobile plat-
form. The system was used to track the motion of
hurdlers during hurdle clearance and can be used by
coaches to evaluate the athlete’s technique. From mo-
tion data, two distance parameters and three angle pa-
rameters have been estimated. The tracking system
that we have developed does not use any markers,
special clothes or other techniques supporting estima-
tion. The applications developed are run on a Ras-
pberry Pi 3 B+ microcomputer board equipped with
a quad-core ARM-8 Cortex-A53 1.4 GHz processor
and 1 GB of RAM and a NVidia Jetson TX2 deve-
lopment kit equipped with Dual-Core Denver 64-bit
CPUs, a Quad-Core A57 Complex and 8 GB of RAM.
This study is a continuation of our previous research
(Krzeszowski et al., 2016).
The aim of this paper is the implementation
using a mobile device of a method of human mo-
tion tracking for hurdles clearance based on kinematic
analysis and its evaluation.
2 METHODS
2.1 Monocular Human Motion
Tracking
The main purpose of human pose recovery is to esti-
mate a body pose which closely reflects a real pose re-
gistered from a sensor input (Moeslund et al., 2006).
With the conjunction of cameras as sensors, vision-
based approaches are widely used in human motion
analysis. Estimating the 3D body pose from visual ap-
pearance features by employing vision-based approa-
ches is a challenging problem due to the high dimen-
sional search space of the underlying model used to
represent body structure, as well as appearance vari-
ability between observed humans and environmental
conditions (John et al., 2010; Kwolek et al., 2012).
Those conditions may manifest as image noise, that
can make background and feature detection very dif-
ficult. The monocular camera approach is also prone
to increased observation ambiguity especially when
some of the body parts are obscured due to the motion
performed. Tracking may be applied to ensure the co-
herence among recovered poses over the time. The
simplified human body appearance may be adequa-
tely represented by no less than 10 large body parts.
More precise models are required for the purpose of
tracking upper and lower extremities (Deutscher and
Reid, 2005; John et al., 2010; Kwolek et al., 2012;
Krzeszowski et al., 2016). For the purpose of tracking
hurdling motion the underlying articulated kinematic
structure of an athlete is represented by a tree consis-
ting of 11 rigid segments (Deutscher and Reid, 2005).
The manoeuvrability of each segment is determined
by the number of degrees of freedom (DoF) that de-
fine its orientation, and in the case of the pelvis, its
location in 3D space. Applying constraining factors
to the movement of the segments allows 3D models to
be used for 2D human motion recovery and tracking.
By taking into account a prior knowledge of hurdle
running, the motion model can operate with 19 DoFs,
see Figure 1. We also assume that the hurdle runner
will move perpendicularly to the camera and will not
change its direction. The model can also be projected
into 2D image space approximating each segment by
a tetrahedron created using a simplified perspective
projection of a truncated cone (Kwolek et al., 2012).
The image of a model silhouette and contour can be
generated by drawing filled tetrahedrons and their ed-
ges.
The likelihood function is used to evaluate the
degree of similarity between real and estimated
monocularly-viewed human poses. Depending on the
approach, different visual features may be used to
icSPORTS 2018 - 6th International Congress on Sport Sciences Research and Technology Support
50
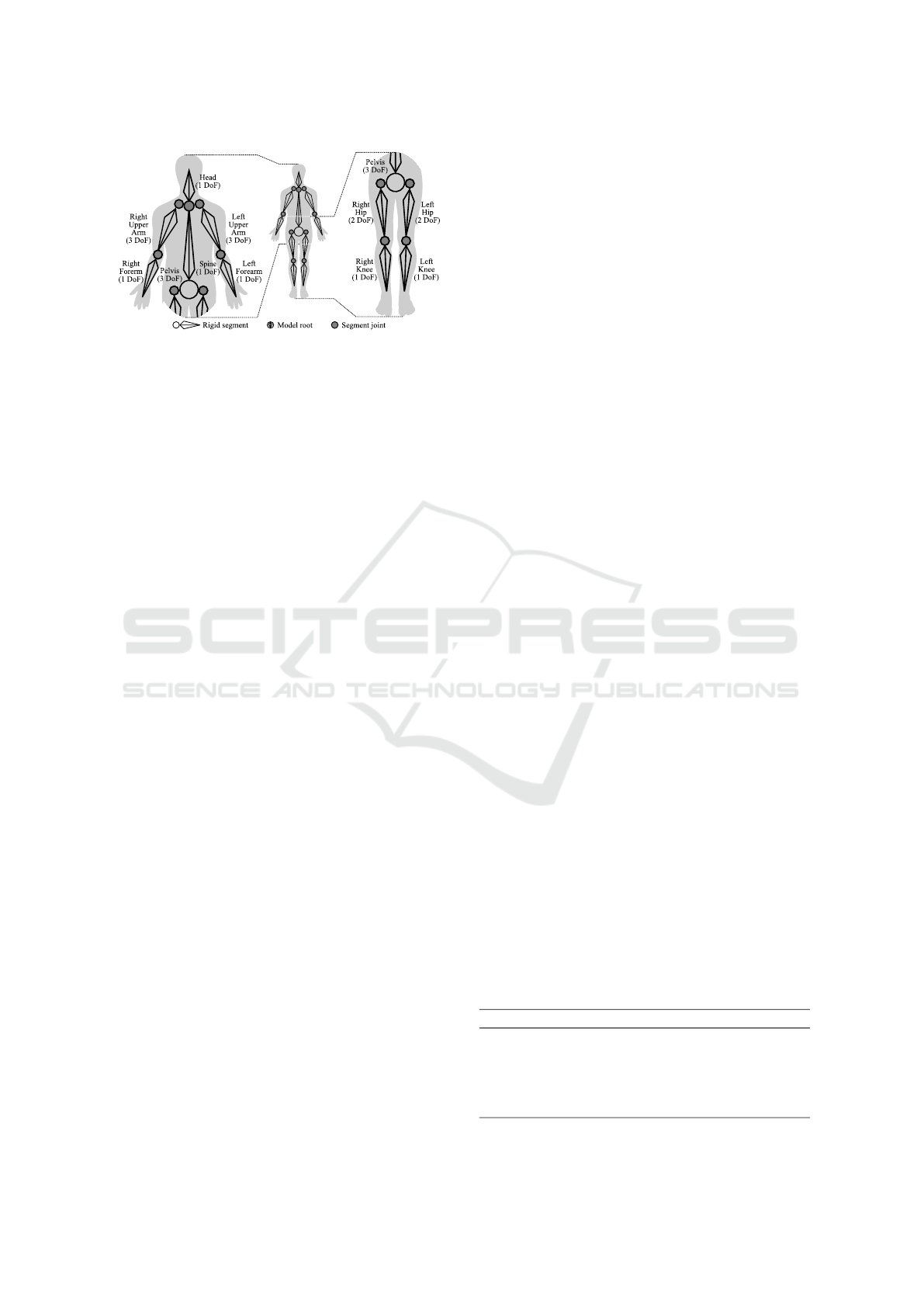
Figure 1: Hierarchical structure of 3D human body model.
define the degree of similarity between poses. In
this paper, the likelihood function is determined ba-
sed on the extracted human silhouette image S and
the edge distance map image D (John et al., 2010;
Kwolek et al., 2012). Gaussian Mixture-based Back-
ground/Foreground Segmentation algorithm (Kaew-
TraKulPong and Bowden, 2002) is used for human
silhouette extraction. The edge distance map is de-
termined using Chebyshev distances and it is based
on the edges detected by the Sobel operator and mas-
ked by the extracted human silhouette. The proposed
likelihood function is determined according to the fol-
lowing equation:
f (x) = 1 −
a f
s
(x) + (1 −a) f
c
(x)
(1)
where a = 0.7 is an importance coefficient of a
function f
s
(x) and f
c
(x). The f
s
(x) function reflects
the degree of overlap between the image of the extrac-
ted human body silhouette S and the corresponding
image of model silhouette S
x
in pose x. The f
c
(x)
function reflects the edge distance map-based simila-
rity of the model in pose x with a silhouette contour
C
x
and acquired edge distance map D.
The Particle Swarm Optimisation (PSO) algo-
rithm can be successfully employed to track full body
motion using single (John et al., 2010) and multiple
cameras (Kennedy and Eberhart, 1995; John et al.,
2010; Kwolek et al., 2012; Krzeszowski et al., 2016).
The PSO algorithm is an example of population based
stochastic optimization. The optimization is achieved
in an iterative fashion by maintaining a swarm of I
particles that collaborate with each other. Every i-th
PSO particle determines its own current x
i
and best p
i
position in the multidimensional search space, which
each particle explores with the velocity v
i
in each ite-
ration l.
In order to work correctly our current version of
the algorithm requires: choosing the initial 3D model
configuration, defining the height of the hurdle obsta-
cle visible on the acquired image to scale the model
to the correct size, defining the first frame of the se-
quence where the human is fully visible, and a rough
3D model pose.
In this paper each particle position x
i
represents a
hypothetical state of the 3D model. Human motion
tracking is performed by a sequence of static PSO-
based optimizations followed by the re-diversification
of particles to anticipate the pose expected in the next
frame (t + 1). The re-diversification of the particles at
the beginning of each frame is obtained on the basis
of a normal distribution centred around the best parti-
cle location g found in the previous frame as well as
from a set of five model states K
1...5
representing the
key phases of hurdle clearance motion (Krzeszowski
et al., 2016):
x
t+1
i
=
(
N g
t
if i < 0.5I
N K
(i mod 5)+1
if i ≥ 0.5I
(2)
2.2 Data Acquisition
The algorithm was applied to three sequences registe-
red in the athletics stadium with a tartan track. Each
sequence represents a single run performed by the
same competitor. Hurdle clearance was captured in
the regulation conditions of the 100 m women race
(hurdle height: 0.762 m). The sequences, in the form
of colour images of size 1920x1080 pixels, were cap-
tured with a HTC M8s smartphone taking 30 frames
per second. The smartphone was placed on a tripod
perpendicular to the running competitor. The distance
from the camera to the running track was 2.44 m. The
parameters of the cameras have been estimated using
the TSAI calibration method (Tsai, 1987).
In this paper, the authors considered selected pa-
rameters of hurdle clearance, which are presented in
Table 1. These parameters were chosen based on the
literature (
ˇ
Coh, 2003; Krzeszowski et al., 2016). In
clearing the hurdle, three time points were distinguis-
hed (Figure 2). The first point (P
1
) is defined by the
moment when the athlete positions himself to clear
the hurdle. The second point (P
2
) is determined by the
position of the athlete when both of their legs are off
the ground and their feet are at the same height. The
third point (P
3
) is determined by the moment when
the athletes put their lead leg behind the hurdle.
The repeatability of the algorithm were calculated
using a coefficient of variation. This indicator is ex-
Table 1: Calculated parameters of hurdle clearance.
Parameters Description
h the height of centre of mass (CM)
w the CM to hurdle distance
α the bending angle of the knee - trail leg
β the bending angle of the knee - lead leg
γ the torso inclination angle
Kinematic Analysis of Hurdle Clearance using a Mobile Device
51
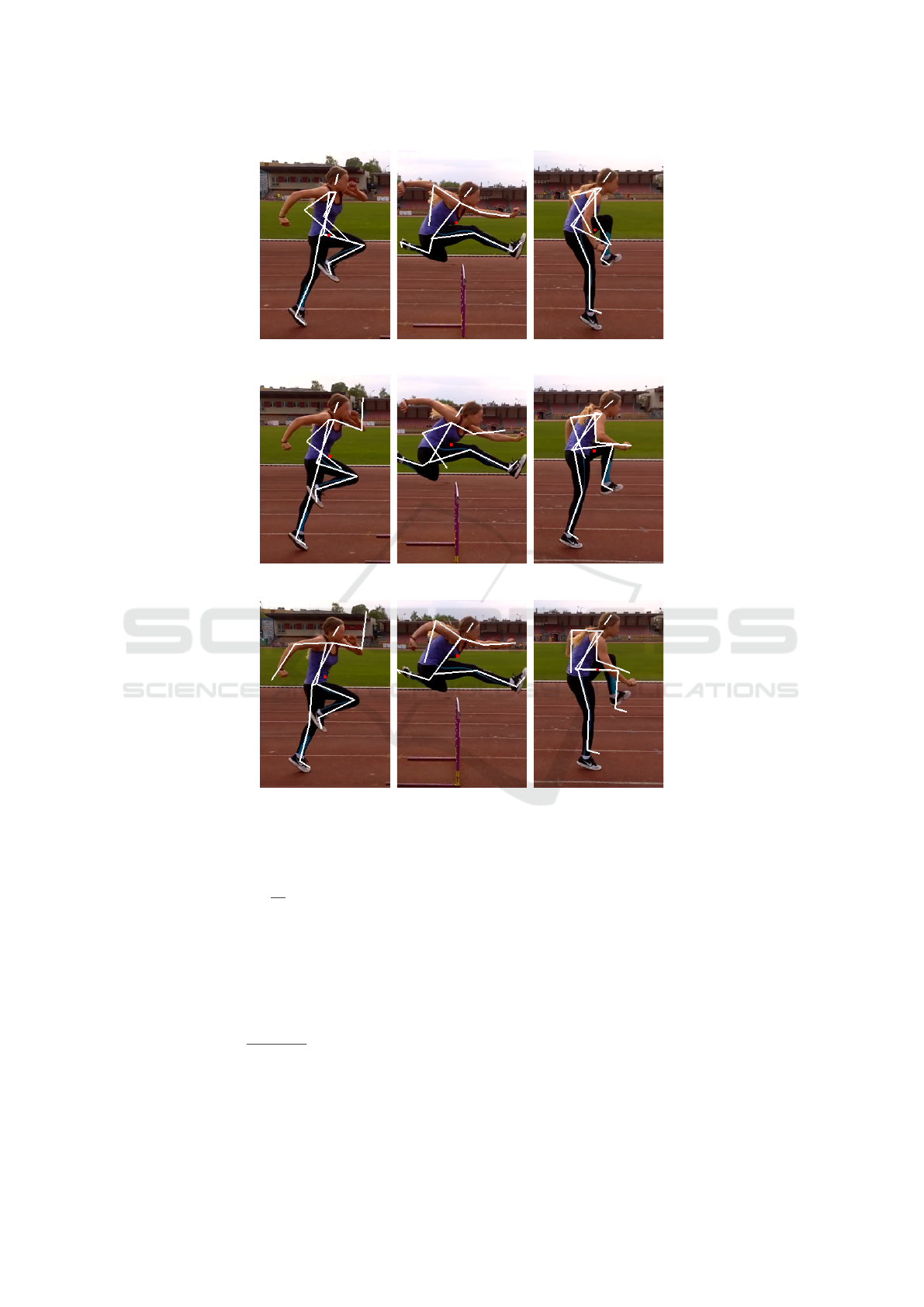
Figure 2: Example of tracking results for sequence 1, frames #55, 61 and 66.
Figure 3: Example of tracking results for sequence 2, frames #78, 84 and 90.
Figure 4: Example of tracking results for sequence 3, frames #44, 51 and 56.
pressed by the formula:
V =
sd
M
· 100 (3)
where sd is the standard deviation and M is the mean
value. The parameters were calculated using the pro-
posed method and compared with the ground truth
values (manual setting of the reference model para-
meters). The quality criterion for the algorithm was
defined as:
δ =
|M − GT |
M
· 100 (4)
where δ is the relative error, M is the estimated value
(determined by the mean value of 10 repetitions of the
algorithm), GT is the ground truth value.
3 EXPERIMENTAL RESULTS
An example of the tracking results for all sequences
for the three selected frames are shown in Figures 2,
3 and 4. As one may observe, the projected 3D model
matches the athlete on the images reasonably well. As
follows from the analysis, the presented method pro-
vides the correct detection of lower limbs, however,
sometimes there are inaccuracies in tracking, particu-
larly in the point (P
3
), see Figure 2 frame #66 and
Figure 4 frame #56. Analysis also shows that there
are some problems with the correct tracking of the
upper limbs arising due to the mutual covering of par-
ticular parts of the body. They are difficult to elimi-
nate when a monocular camera from a mobile device
icSPORTS 2018 - 6th International Congress on Sport Sciences Research and Technology Support
52
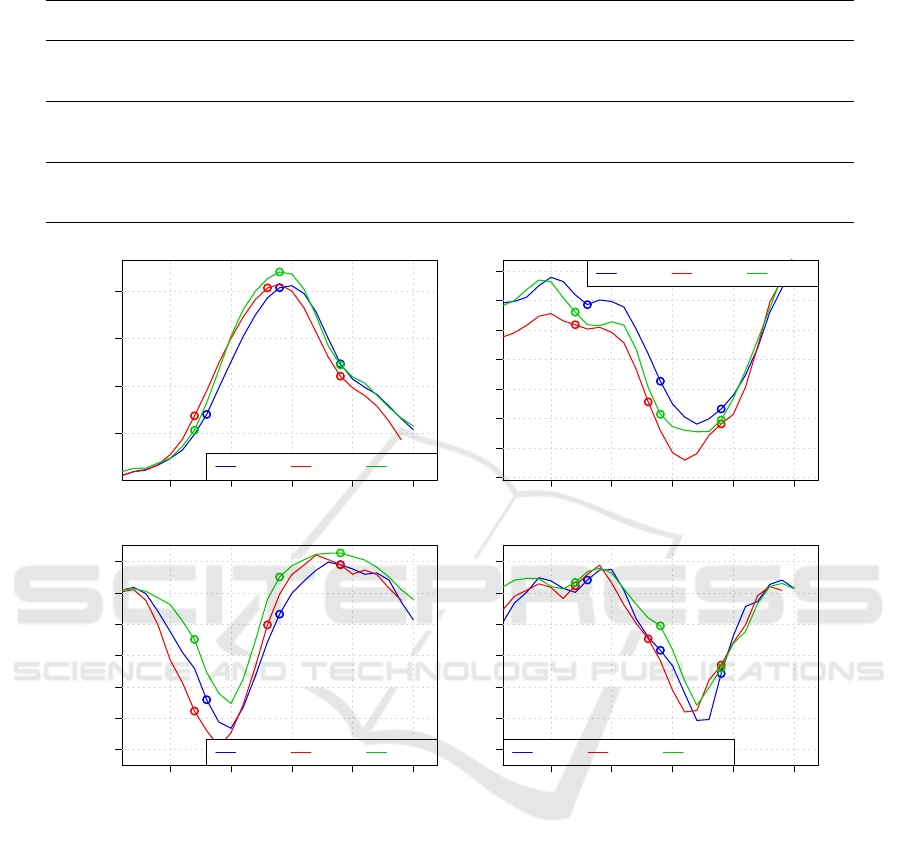
Table 2: Mean value and coefficient of variation for 10 algorithm repetition.
h [mm] α [deg] β [deg] γ [deg]
M V GT δ % M V GT δ % M V GT δ % M V GT δ %
P1 996 6.8 1057 6 164 8.2 170 4 47 50.8 42 11 74 4.8 70 5
Seq. 1 P2 1221 1.5 1275 4 100 29.4 49 51 140 8.7 153 9 58 14.1 44 23
P3 1004 3.2 981 2 141 18.9 62 56 149 16.6 155 4 58 4.5 64 10
P1 995 3.7 1029 3 166 7.1 170 2 38 12.8 42 11 71 6.6 70 1
Seq. 2 P2 1225 1.6 1270 4 101 15.8 49 52 145 5.4 153 6 52 17.1 44 15
P3 998 2.3 965 3 89 10.8 71 20 154 2.6 155 1 54 5.1 61 12
P1 954 6.1 1005 5 155 6.8 165 6 94 40.1 42 55 72 4.5 70 2
Seq. 3 P2 1247 0.4 1261 1 113 15.2 37 67 157 1.9 156 1 53 4.6 44 16
P3 1034 1.3 999 3 97 16.9 74 24 165 2.4 155 6 58 7.3 64 10
5 10 15 20 25
900 1000 1100 1200
Frame
h [mm]
Seq. 1 Seq. 2 Seq. 3
P1
P2
P3
5 10 15 20 25
45 50 55 60 65 70 75 80
Frame
γ [deg]
Seq. 1 Seq. 2 Seq. 3
P1
P2
P3
5 10 15 20 25
40 60 80 100 120 140 160
Frame
β [deg]
Seq. 1 Seq. 2 Seq. 3
P1
P2
P3
5 10 15 20 25
40 60 80 100 120 140 160
Frame
α [deg]
P1
P2
P3
Seq. 1 Seq. 2 Seq. 3
Figure 5: Parameters of hurdle clearance for the sequences analysed.
is used. Therefore, the authors only considered the
parameters associated with lower limbs. As a conse-
quence, incorrect arm motion tracking does not im-
pact the measurement of the parameters analysed.
The results were obtained for N = 10 repetitions
of the tracking algorithm for each sequence. Parame-
ters were calculated on the basis of the athlete’s esti-
mated body poses. Table 2 presents the mean value
(M), coefficient of variation (V ), ground truth values
(GT ) and relative errors (δ) of the parameters analy-
sed. An analysis of the results showed that the gre-
atest dispersion of the solutions generated by the al-
gorithm is observed for the angle of the lead leg β
(50.8 for point P
1
in Seq. 1 and 40.1 in Seq. 3). Ho-
wever, the smallest dispersion and, consequently, the
highest repeatability of the algorithm was observed
for the height of CM in point P
2
for each sequence
(1.5, 1.6, 0.4 correspondingly).
An analysis of errors showed that the most accu-
rate estimation is observed for the height of the centre
of mass h. In all running trials (sequences) this error
did not exceed 6%, while the smallest one was equal
to 1% (P
2
in Seq. 3). The smallest accuracy of de-
termining the analysed parameters is observed for the
parameter α. For this parameter, the largest error was
noted in P
2
for Seq. 3 (δ = 67%), while the smallest
one occurred in P
1
for Seq. 2 (δ = 2%). The values
of errors generated for β are much smaller than the
errors generated for α, but in one case a high error is
also observed (δ = 55% in P
1
for Seq. 3). The re-
maining errors calculated for the β parameter do not
exceed 11%. An analysis of the errors for the last pa-
Kinematic Analysis of Hurdle Clearance using a Mobile Device
53

rameter showed that this parameter in most cases is
generated with an error below 17%, with the smallest
error observed in P
1
for Seq. 2 (δ = 1%), and the lar-
gest in P
2
for Seq. 1 (δ = 23%).
The presented method also allows for an observa-
tion of the analysed parameter changes over time. Fi-
gure 5 presents the parameters of hurdle clearance as
a function of time (frames). The key points of hurdle
clearance have been marked on the charts (P
1
—P
3
).
The charts present the mean value of the parameters
for 10 repetitions of the algorithm, additionally a mo-
ving average filter with the window equal to three was
used. The analysis showed that the hurdle clearance
parameters in the individual sequences are close to
each other, which indicates the repeatability of the
movement performed by the competitor.
4 CONCLUSIONS
This paper has proposed a human motion tracking
method that can be deployed and run on a mobile de-
vice. The method can be used by coaches for the eva-
luation of the athlete’s technique. This system was
tested on two mobile development platforms and three
image sequences of an athlete clearing a hurdle which
were recorded using a smartphone. In the performed
experiments, the hurdle clearance parameters were es-
timated based on the human poses obtained. An ana-
lysis of the errors received showed that the most accu-
rately estimated parameter was the height of the cen-
tre of mass h, while the biggest errors were observed
for the bending angle of the knee for the trail leg α.
Our future work will focus on improving the pro-
posed method and preparing the application for the
Android platform.
ACKNOWLEDGEMENTS
This work has been partially supported by the Polish
Ministry of Science and Higher Education within the
research project ”Development of Academic Sport”
in the years 2016-2019, project No. N RSA4 00554.
REFERENCES
Baca, A., Kornfeind, P., Preuschl, E., Bichler, S., Tampier,
M., and Novatchkov, H. (2010). A server-based mo-
bile coaching system. Sensors, 10(12):10640–10662.
ˇ
Coh, M. (2003). Biomechanical analysis of Colin Jackson’s
hurdle clearance technique. New Studies in Athletics,
1:33–40.
Deutscher, J. and Reid, I. (2005). Articulated body motion
capture by stochastic search. Int. J. Comput. Vision,
61(2):185–205.
Gutierrez-Martinez, J.-M., Castillo-Martinez, A., Medina-
Merodio, J.-A., Aguado-Delgado, J., and Martinez-
Herraiz, J.-J. (2017). Smartphones as a light measure-
ment tool: Case of study. Applied Sciences, 7(6).
Jensen, U., Schmidt, M., Hennig, M., Dassler, F. A., Jaitner,
T., and Eskofier, B. M. (2015). An IMU-based mo-
bile system for golf putt analysis. Sports Engineering,
18(2):123–133.
John, V., Trucco, E., and Ivekovic, S. (2010). Markerless
human articulated tracking using hierarchical particle
swarm optimisation. Image and Vision Computing,
28(11):1530–1547.
KaewTraKulPong, P. and Bowden, R. (2002). An impro-
ved adaptive background mixture model for realtime
tracking with shadow detection. In Proceedings of 2nd
European Workshop on Advanced Video-Based Sur-
veillance Systems; September 4, 2001; London, U.K.
Kennedy, J. and Eberhart, R. (1995). Particle swarm opti-
mization. In Proc. of IEEE Int. Conf. on Neural Net-
works, volume 4, pages 1942–1948. IEEE Press, Pis-
cataway, NJ.
Koyama, Y. and Watanabe, K. (2014). Auditory golf co-
aching system using perceptive sportswear based on
hetero-core optics. In 2014 IEEE 3rd Global Confe-
rence on Consumer Electronics (GCCE), pages 643–
646.
Kranz, M., M
¨
oller, A., Hammerla, N., Diewald, S., Pl
¨
otz,
T., Olivier, P., and Roalter, L. (2013). The mobile fit-
ness coach: Towards individualized skill assessment
using personalized mobile devices. Pervasive and Mo-
bile Computing, 9(2):203–215. Special Section: Mo-
bile Interactions with the Real World.
Krzeszowski, T., Przednowek, K., Wiktorowicz, K., and
Iskra, J. (2016). Estimation of hurdle clearance pa-
rameters using a monocular human motion tracking
method. Computer Methods in Biomechanics and
Biomedical Engineering, 19(12):1319–1329. PMID:
26838547.
Kwolek, B., Krzeszowski, T., Gagalowicz, A., Wojciechow-
ski, K., and Josinski, H. (2012). Real-time multi-view
human motion tracking using particle swarm optimi-
zation with resampling. In Perales, F., Fisher, R., and
Moeslund, T., editors, Articulated Motion and Defor-
mable Objects, volume 7378 of Lecture Notes in Com-
puter Science, pages 92–101. Springer Berlin Heidel-
berg.
Mitchell, E., Monaghan, D., and O’Connor, N. E. (2013).
Classification of sporting activities using smartphone
accelerometers. Sensors, 13(4):5317–5337.
Moeslund, T., Hilton, A., and Kr
¨
uger, V. (2006). A sur-
vey of advances in vision-based human motion cap-
ture and analysis. Computer Vision and Image Under-
standing, 104(2-3):90–127.
M
¨
oller, A., Scherr, J., Roalter, L., Diewald, S., Hammerla,
N., Pl
¨
otz, T., Olivier, P., and Kranz, M. (2011). Gym-
skill: mobile exercise skill assessment to support per-
sonal health and fitness. In Adjunct Proceedings of
icSPORTS 2018 - 6th International Congress on Sport Sciences Research and Technology Support
54

9th International Conference on Pervasive Computing
(Pervasive 2011).
Shawen, N., Lonini, L., Mummidisetty, K. C., Shparii, I.,
Albert, V. M., Kording, K., and Jayaraman, A. (2017).
Fall detection in individuals with lower limb amputati-
ons using mobile phones: Machine learning enhances
robustness for real-world applications. JMIR Mhealth
Uhealth, 5(10):e151.
Simpson, A., Gemming, L., Baker, D., and Braakhuis, A.
(2017). Do image-assisted mobile applications im-
prove dietary habits, knowledge, and behaviours in
elite athletes? a pilot study. Sports, 5(3).
Tsai, R. (1987). A versatile camera calibration technique
for high-accuracy 3D machine vision metrology using
off-the-shelf tv cameras and lenses. IEEE Journal on
Robotics and Automation, 3(4):323–344.
Weghorn, H. (2013). Applying mobile phone technology
for making health and rehabilitation monitoring more
affordable. In Biosignals and Biorobotics Conference
(BRC), 2013 ISSNIP, pages 1–5.
Weiler, R. (2016). Ubersense coach app for sport me-
dicine? Slow motion video analysis (Mobile App
User Guide). British Journal of Sports Medicine,
50(4):255–256.
Xu, J. Y., Nan, X., Ebken, V., Wang, Y., Pottie, G. J.,
and Kaiser, W. J. (2015). Integrated inertial sen-
sors and mobile computing for real-time cycling per-
formance guidance via pedaling profile classification.
IEEE Journal of Biomedical and Health Informatics,
19(2):440–445.
Yamaguchi, Y. and Miura, M. (2016). Real-time analy-
sis of baseball pitching using image processing on
smartphone. Procedia Computer Science, 96:1059–
1066. Knowledge-Based and Intelligent Information
and Engineering Systems: Proceedings of the 20th In-
ternational Conference KES-2016.
Yeo, B. K. and Sirisena, D. (2017). Simi move: entry le-
vel mobile app to analyse walking and running gait.
British Journal of Sports Medicine.
Yilmaz, A., Li, X., and Shah, M. (2004). Contour-based ob-
ject tracking with occlusion handling in video acqui-
red using mobile cameras. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 26(11):1531–
1536.
Kinematic Analysis of Hurdle Clearance using a Mobile Device
55
