
Full-Body Interaction-based Learning Support to Enhance
Immersion in Zoos
Evaluating an Electrodermal Activity Response Support System
Mikihiro Tokuoka
1
, Hiroshi Mizoguchi
1
, Ryohei Egusa
2,3
, Shigenori Inagaki
3
and Fusako Kusunoki
4
1
Department of Mechanical Engineering, Tokyo University of Science, 2641 Yamazaki, Noda-shi, Chiba-ken, Japan
2
JSPS Research Fellow, Tokyo, Japan
3
Graduate School of Human Development and Environment, Kobe University, Hyogo, Japan
4
Department of Computing, Tama Art University, Tokyo, Japan
Keywords: Body Movement, EDA, Kinect Sensor, Learning Support, Virtual, Zoo.
Abstract: We are developing a learning support system for zoos that enables children to learn through body
movements. For children, the zoo is an important place for science education outside of school. However,
learning methods in zoos are mainly limited to observing exhibits and explanations. In addition, when
children want to observe animals that are hiding, they can neither touch nor observe them. Therefore, in this
study, we develop a body-experience-based learning support system that can be applied in zoos. The system
measures the learners’ body movements using a sensor, and provides a sense of immersion in the
environment where animals live by adapting the surroundings based on these movements. In the first stage
of this project, we have developed a prototype that allows learners to jump with animals, and enables
children to efficiently learn animals’ physical characteristics. In this paper, we describe the results of our
experimental evaluation of by measuring physiological responses.
1 INTRODUCTION
Hundreds of millions of visitors worldwide, most of
whom are children, experience zoos each year
(Wagoner, 2010). For these children, the zoo is a
very important place for science learning outside of
the classroom (National Research Council, 2009);
observing and touching animals motivates children
to learn more about the animals and their ecology in
detail (Braund, 2006). However, learning methods in
zoos are mainly limited to observing exhibits and
listening to explanations. Furthermore, children can
neither touch nor observe animals that are hiding,
making it impossible to make contact with the
animals; it is very difficult for children to imagine
the ecology of animals by themselves, which
reduces their motivation to study. To solve these
problems, conventional research has proposed
learning support, including providing video content
and using tablets (Zarzuela, 2013; Webber, 2015;
Tanaka, 2017). However, these studies lack active
mass and children’s experiences; they are far
different from the actual experience of making
contact with animals, presenting a fundamental
problem. Solving these problems requires a system
that enables children to observe animals and have an
authentic experience.
Children think hard while playing (Dau, 1999;
Levin, 1996). When children use gestures and
movements, the learning environment becomes more
natural (Grandhi, 2011; Nielsen, 2004; Villaroman,
2011) and children can retain more of the knowledge
being taught (Edge, 2013; Antle, 2009). Therefore,
we focus on playing while moving the body; by
using body movements, we can provide real
experiences and impart knowledge.
We are developing a learning support system for
zoos that enables children to learn through body
movements. In this system, body movement
information is acquired by a sensor, and the content
operates based on this information. We attempt to
provide realistic experiences of animals that are
more difficult to contact directly. Furthermore, by
reflecting the learners’ body movements in virtual
space as an observation behavior, the learner feels
immersed, and their experience approaches
336
Tokuoka, M., Mizoguchi, H., Egusa, R., Inagaki, S. and Kusunoki, F.
Full-Body Interaction-based Learning Support to Enhance Immersion in Zoos.
DOI: 10.5220/0006768703360341
In Proceedings of the 10th International Conference on Computer Supported Education (CSEDU 2018), pages 336-341
ISBN: 978-989-758-291-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

authenticity; we therefore expect that they can learn
sufficiently about the ecology of animals.
In this paper, we describe the results of
evaluating the usefulness of this system by
developing and evaluating prototypes as a first step
in realizing a system to support learning about
animals in the zoo. We quantitatively evaluate
interest by measuring electrodermal activity (EDA),
which is physiological response that indicates
whether children are interested in the animals and
motivated by the system.
2 LEARNING SUPPORT IN ZOOS
2.1 System
We are developing a learning support system for
zoos that enables children to learn through body
movements. We use the example of the wildcat,
which is a felid belonging to the class Mammalia.
Wildcats are shy and do not commonly interact with
people. However, wildcats can jump high. In zoos,
wildcats hide, because they are not good at
connecting with people; therefore, they are difficult
for children to observe. Our proposed system
supports learning about wildcats by using various
sensors to measure a learner’s position, attitude and
movement, and operating a learning system based on
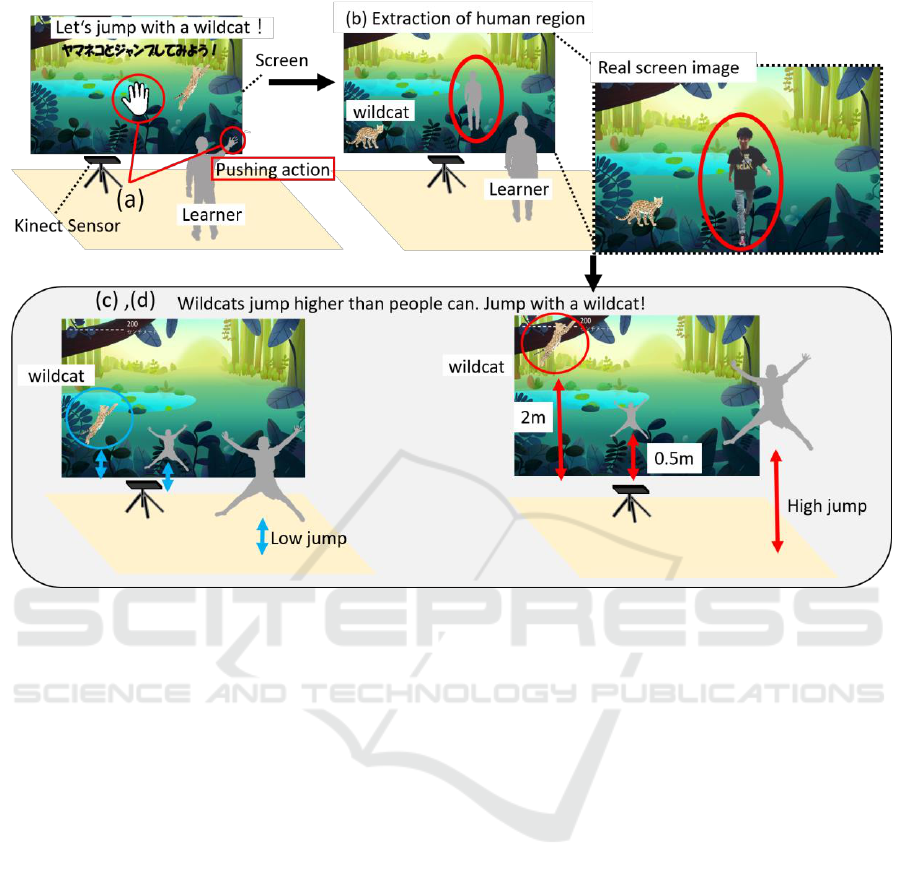
these data. Figure 1 shows a schematic of the
system; in the space displayed onscreen, the object
to be learned changes in conjunction with body
movement. The system provides learners with the
feeling of being in the environment where the
animals live. In addition, real observations of
behavior—approaching animals, jumping, etc.—are
incorporated to give learners a more realistic
experience than just watching exhibits or videos. It
is thus possible to increase their motivation to learn
and the knowledge obtained. As the animals move
according to the children’s body movements, the
learners identify the animals as realistic, rather than
just virtual creatures.
2.2 System Configuration
To implement our zoo learning support system, we
are developing a system that lets children learn
about ecology of the wildcat while projecting them
to an onscreen grassland to jump with a wildcat.
In this system, when a student stands in front of
the screen, the region containing a person is
extracted, and the learner’s body is projected
Figure 1: System concept.
Figure 2: System setup.
with a wildcat by operating the system using body
movements.
The height of the learner's jump is measured by a
sensor, and the learner also jumps along with a
wildcat on the screen; in this way, learners acquire
knowledge of the wildcat’s jumping ability.
Figure 2 shows that this system consists of a
Microsoft Kinect sensor, control PC, and projector.
The Kinect is a range-image sensor originally
developed as a home videogame device. Although it
is inexpensive, the sensor can record sophisticated
user location measurements. Additionally, this
sensor can recognize humans and the human
skeleton using a library in its Windows software
development kit. The Kinect can measure the
location of human body parts such as hands and
legs, and can identify the user’s pose with this
function and its location information. The Kinect
can measure the three-dimensional coordinates of
the skeletons of 25 human beings. To ascertain the
height of a jump, we measure the coordinates of the
learner’s ankle. Next, we extract the image region
containing a human. In Kinect's human body
database, various human body posture patterns
Full-Body Interaction-based Learning Support to Enhance Immersion in Zoos
337
are machine learned and the parts of the body are
identified using this database.
The functions and flow of the system are shown
below:
(a) Operates using the learner’s body movement
(b) Projects a person onto the screen
(c) Interlocks body movements and the screen
(d) Teaches animal characteristics.
Function (a) allows the system to operate as directed
by the user’s hand movements. A learner can click a
button by pushing their hand toward the Kinect
sensor; the learner starts the game with this action.
Clicking the start button brings up a screen for
jumping with a wildcat. The learner can start the
game with their body as an interface. Function (b)
displays the user on the screen by recognizing the
sensor region the learner is in. Learners can immerse
themselves in the world of a wildcat on the screen.
Function (c) allows the user to jump with a wildcat
on the screen. The wildcat on the screen mimics the
height at which the learner jumps. Learners would
be unable to interact in this way with a real wildcat
in the zoo, but our jumping system enables learners
to develop familiarity with the wildcat. Function (d)
gives learners the experience that wildcats are good
at jumping. The system digitizes the actual jump
heights of the learner and the wildcat. When the
learner jumps with all their power, the wildcat is
shown at its impressive jump height of around 2 m.
Therefore, the learner can experience the fact that
wildcats are good at jumping. Figure 3 shows the
system flow and its state while performing Functions
(a), (b), (c) and (d).
3 EVALUATION
3.1 Objective
In this study, we used the method of immersing the
learner in a virtual environment and jumping with a
wildcat to learn about the ecology of wildcats. We
hypothesized that learners’ interests would be
piqued by this environment and activity. However, it
is possible that children are simply interested in
jumping. Therefore, we examined whether children
are more interested when jumping with a wildcat or
jumping alone. We evaluated interested
quantitatively using electrodermal activity (EDA)
which is a physiological response. We thus aimed to
evaluate the usefulness of our system.
Figure 3: System flow.
CSEDU 2018 - 10th International Conference on Computer Supported Education
338
3.2 Evaluation by EDA
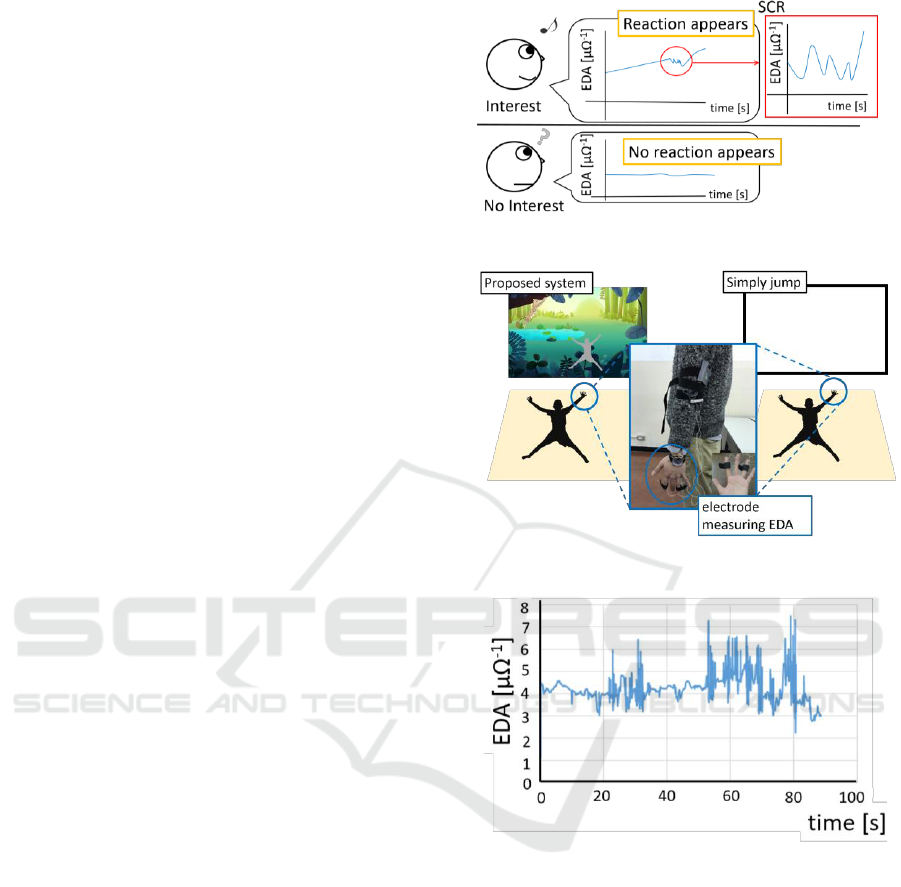
3.2.1 EDA
We used EDA to confirm the presence or absence of
children’s interest. EDA is the change in the
electrical properties of the skin’s surface due to
sweating caused by excitation or tension. The
method of measuring apparent resistance by passing
electricity through the skin is referred to as the
energization method. The sustained activity
measured thereby is referred to as skin conductance
level (SCL). Transient activity is referred to as the
skin conductance response (SCR).
The brain's limbic system is comprised of the
cingulate gyrus, hippocampus, and amygdala.
Recent studies have demonstrated that the limbic
system is activated when a person is interested. In
addition, this system is known to have a close
relationship with emotion (Boucsein, 2012). When
people are visually interested in a subject, they
experience a pleasant feeling and an increase in
arousal, which changes the electrical activity of the
skin and produces an SCR (Yoshida, 2014). Figure 4
shows that if interest is generated, the SCL and SCR
reaction values can be measured from variations
over relatively long and short periods, respectively.
When interest occurs, a reaction appears. By
contrast, no reaction appears when there is no
interest. Therefore, we judge the presence or absence
of interest in the proposed system using EDA.
3.2.2 Method
Twelve fifth- and sixth-grade students (7 boys and 5
girls) from elementary schools attached to the
national university corporation participated in an
experiment at the Hyogo Prefectural Museum of
Natural History on October 27–29, 2017.
We attached an electrode that measures EDA to
a fingertip on each subject’s right hand, as shown in
Figure 5. The participants each experienced the
system individually.
First, children experienced the proposed system
for jumping with a wildcat. Next, they simply
jumped. We measured fluctuations in EDA with
each experience.
3.3 Result
First, we examine representative experimental
results from one user. Figure 6 shows a graph of the
change in EDA when experiencing the proposed
system, whereas Figure 7 shows a graph of the
change in EDA when simply jumping in front of the
screen. The horizontal axis of the graph is time
Figure 4: EDA.
Figure 5: Experimental environment.
Figure 6: EDA in the proposed system experience.
variation and the vertical axis is the degree of
change. From Figures 6 and 7, we see that interest
occurs when users experience the proposed system.
We evaluated our results by calculating the
number of occurrences of interest in each result
compared to the number of trials. When jumping
with a wildcat, interest occurred 29 times. However,
when simply jumping, interest was demonstrated 6
times. This result quantitatively confirmed that
learners are not interested in jumping, but that they
are interested in jumping with a wildcat. Thus, it was
possible to quantitatively evaluate the number of
occurrences of interest.
Next, we considered the experimental results of
all the subjects, which are listed in Table 1.
Statistical tests were conducted on the EDA results
Full-Body Interaction-based Learning Support to Enhance Immersion in Zoos
339
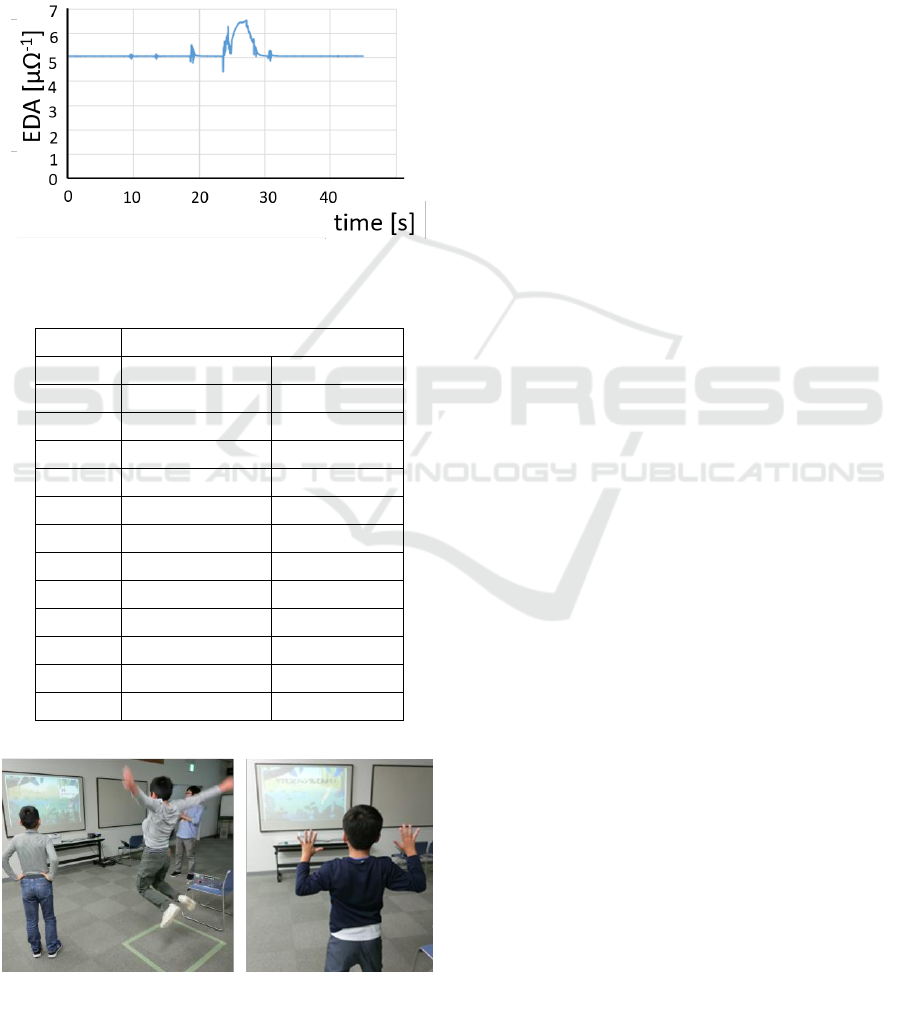
in the two scenarios, and a t-test analyzing the
difference between the average EDAs produced a
result of p < 0.01, which corresponds to a significant
difference.
With this result, we have demonstrated
quantitatively that children are interested in the
wildcat and motivated to learning about the wildcat
after experiencing the proposed system. Figure 8
shows children experiencing the proposed system.
Figure 7: EDA when simply jumping.
Table 1: Results of all subjects.
number of EDAs
Subject
Proposed system
Jumping only
1
29
6
2
15
10
3
34
8
4
16
2
5
15
7
6
25
19
7
23
21
8
40
22
9
24
8
10
35
18
11
21
18
12
23
12
Figure 8: Learner in the system experience.
4 CONCLUSIONS
In this paper, as a first step in implementing a
learning support system for children visiting zoos,
we proposed a system that allows children to jump
together with a wildcat using a Kinect sensor. We
also described the quantitative evaluation results of
measuring EDA, which is physiological response, as
a metric of whether children are motivated by and
interested in virtual contact with animals.
From our experiment, it became quantitatively
clear that learners can be interested in animals and
motivated by the proposed system experience, which
enables them to jump with virtual animals on a
screen following their body movement. This result
demonstrated that the proposed system effectively
provides a platform for observation of and learning
about the wildcat, an animal that is difficult to
observe directly in a zoo.
In the future, it will be necessary to evaluate
knowledge acquisition and conduct experiments at
real zoos. First, children observe the system after
observing a rooster at the zoo. Then, we will
evaluate the acquisition interests and knowledge,
which with further the system’s development. This
experiment is already scheduled.
ACKNOWLEDGEMENTS
This work was supported in part by Grants-in-Aid
for Scientific Research (A). The evaluation was
supported by the Museum of Nature and Human
Activities, Hyogo, Japan.
REFERENCES
Wagoner, B., Jensen E., 2010. "Science learning at the
zoo: Evaluating children’s developing understanding
of animals and their habitats." Psychology & Society,
65–76.
National Research Council, 2009. Learning science in
informal environments: People, places, and pursuits.
National Academies Press.
Braund, M., Reiss, M., 2006, "Towards a more authentic
science curriculum: The contribution of out‐of‐school
learning." International Journal of Science Education,
1373–1388.
Zarzuela, M. M., et al., 2013. "Mobile serious game using
augmented reality for supporting children's learning
about animals." Procedia Computer Science 25, 375–
381.
Webber, S., 2015. "Design and evaluation of interactive
technology for human–animal encounters at the zoo."
CSEDU 2018 - 10th International Conference on Computer Supported Education
340

Proceedings of the 12th International Conference on
Advances in Computer Entertainment Technology,
ACM.
Tanaka, Y., Egusa, R., Dobashi, Y., Kusunoki, F.,
Yamaguchi, E., Inagaki, S., Nogami, T., 2017.
“Preliminary evaluation of a system for helping
children observe the anatomies and behaviors of
animals in a zoo.” Proceedings of the 9th International
Conference on Computer Supported Education 2,
305–310.
Dau, E., Jones, E., 1999. Child's Play: Revisiting Play in
Early Childhood Settings. Brookes Publishing, Maple
Press.
Levin, D., 1996. “Endangered play, endangered
development: A constructivist view of the role of play
in development and learning.” In A. Phillips (Ed.),
Topics in early childhood education 2: Playing for
keeps. St. Paul, MI: Inter-Institutional Early Childhood
Consortium, Redleaf Press
Grandhi, S. A., Joue, G., Mittelberg, I., 2011.
Understanding naturalness and intuitiveness in gesture
production: insights for touchless gestural interfaces.
Proceedings of CHI, 821–824.
Nielsen M., Störring, M., Moeslund, T., Granum E., 2004.
“A procedure for developing intuitive and ergonomic
gesture interfaces for HCI.” Gesture-Based
Communication in HCI, 105–106.
Villaroman, N., Rowe, D., Swan, B., 2011. “Teaching
natural user interaction using OpenNI and the
Microsoft Kinect Sensor.” Proceedings of SIGITE,
227–232.
Edge, D., Cheng, K. Y., Whitney, M., 2013. “SpatialEase:
learning language through body motion.” Proceedings
of CHI, 469–472.
Antle, A., Kynigos, C., Lyons, L., Marshall, P., Moher, T.,
Roussou, M., 2009. “Manifesting embodiment:
Designers’ variations on a theme.” Proceedings of
CSCL, 15–17.
R. Yoshida, T. Nakayama, T. Ogotsu, H. Takemura, H.
Mizoguchi, E. Yamaguchi, S. Inagaki, Y. Takeda, M.
Namatame, M. Sugimoto, F. Kusunoki., 2014.
“Feasibility study on estimating visual attention using
electrodermal activity,” Proceedings of the 8
th
International Conference on Sensing Technology.
Boucsein, W., 2012. Electrodermal activity. Springer
Science & Business Media.
Full-Body Interaction-based Learning Support to Enhance Immersion in Zoos
341
