
SLA Non-compliance Detection and Prevention in Batch Jobs
Alok Patel, Abhinay Puvvala and Veerendra K. Rai
Tata Research Development and Design Centre, Tata Consultancy Services,
54B, Hadapsar Industrial Estate, Pune- 411013, India
Keywords: Batch Job Systems, Levers, SLA Compliance, Optimization, Constraints.
Abstract: This paper reports the study done on SLA non-compliance detection and prevention in batch job systems. It
sets out the task of determining optimal and the smallest set of levers to minimize SLA non-compliance at
minimum impact business requirements. The methodology to address the problem consists of a four-step
process that includes inputs, pre-processing, modelling & solving and post processing. This paper uses Integer
Linear Programming (ILP) to achieve global optima given a set of varied constraints such as sacrosanct con-
straints, auxiliary constraints, reach time constraints and SLA non-compliant identifier constraints. Method-
ology has been tested on two sets of data- synthetic data of small size to corroborate the correctness of ap-
proach and a real batch job system data of a financial institution to test the rigor of the approach.
1 INTRODUCTION
Batch jobs have become ubiquitous in enterprise IT
of today’s organizations. Batch jobs are so called due
to a particular mode of processing- execution of jobs
in a sequence i.e. batch. The IT infrastructure under-
lying business processes of modern day organizations
are tuned to perform high volume, repetitive
tasks/jobs that require little or no human intervention.
Most of these tasks/jobs need not be handled in real
time. Data integration, compliance checks, analytics,
reporting, billing and image processing jobs are some
examples of Batch applications.
Typically, a batch system is characterized by jobs
and interdependence among jobs. Business processes
(streams) are broken down into series of steps re-
ferred to as jobs. Each job can only start after its pre-
decessors have completed their execution. Business
requirements define these precedence relations
among jobs. In addition, business requirements entail
various other constraints such as ‘start time’, critical-
ity, batch completion time etc. These constraints are
described in greater detail in subsequent sections.
A vital aspect of batch systems is the Service
Level Agreements (SLAs). SLAs are defined by
measuring the ‘start time’ and ‘end time’ of business
critical jobs and processes. In a typical investment
bank setting, for instance, bulk of batch applications
are scheduled to run after trading hours and are ex-
pected to finish before the start of next day’s trading.
To fulfil this business requirement, SLAs are defined
for each batch process separately. However, spikes in
workload, inadequately provisioned computational
resources along with many other reasons often lead to
SLA violations. The onus is on the system adminis-
trators to handle such scenarios and ensure that SLA
violations are minimized. To do so, it is essential to
not only predict potential SLA violations, but also to
identify the right set of levers that can be used to min-
imize SLA non-compliance.
SLAs are critical to businesses. Firms view SLAs
as instruments to establish measurable targets of per-
formance with the objective of achieving required
levels of service. SLAs for enterprise IT translate the
expectations from the business perspective to quanti-
fiable performance targets for various IT systems.
Thus enabling them to monitor and steer the engage-
ments from a distance. An important aspect of SLAs
is the associated financial penalties with adverse out-
comes. A customer having signed such an agreement
with a service provider may claim compensation in
case of non-compliance. Non-compliance, in the con-
text of batch systems may include reduced through-
put, longer wait times, poor Quality of Service (QoS),
deadline misses, etc.
In a complex system there could be multiple ob-
jectives such as efficiency, cost, compliance etc. In a
systemic setting these objectives are often intertwined
and there is a trade-off in meeting them. Set of levers
available to meet these objectives also overlap and
Patel, A., Puvvala, A. and Rai, V.
SLA Non-compliance Detection and Prevention in Batch Jobs.
DOI: 10.5220/0006673903970406
In Proceedings of the 20th International Conference on Enterprise Information Systems (ICEIS 2018), pages 397-406
ISBN: 978-989-758-298-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
397
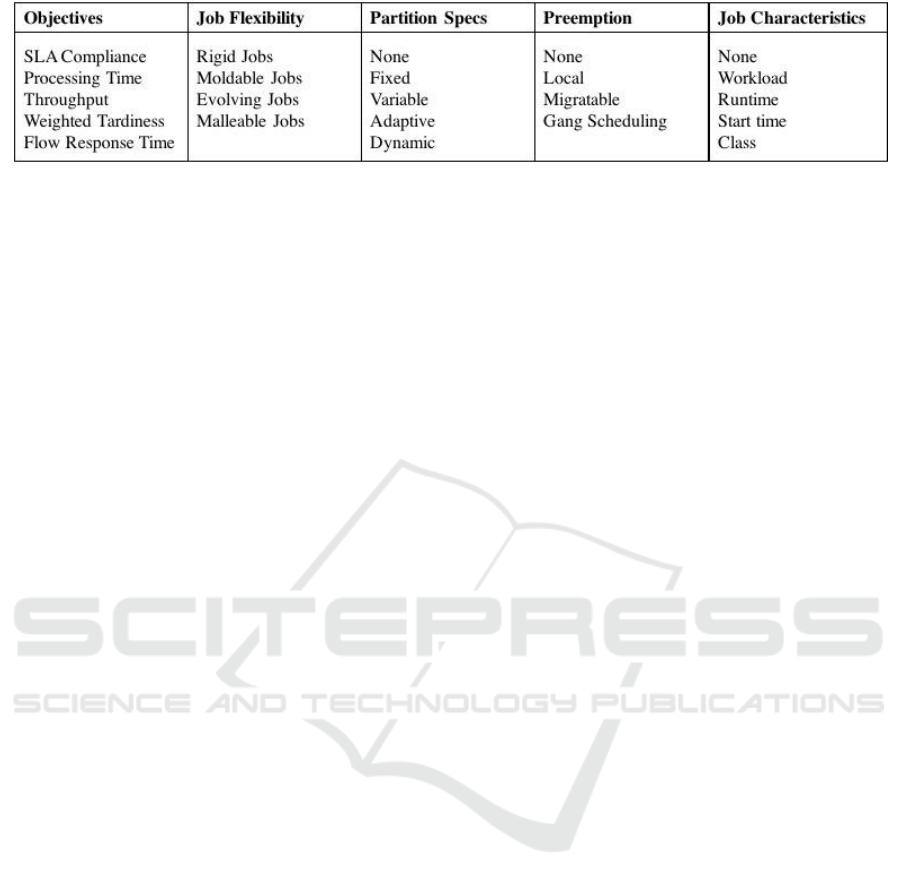
Figure 1: Literature Classification: Dimensions of Scheduling Models.
there is many to many relationships between objec-
tives and levers.
Levers are assessed on their potential impact on
the objectives and business logic to arrive at an opti-
mal selection. Postponing the run of a particular job
to another day, deleting dependencies between jobs,
reducing the ‘run time’ of a job by provisioning addi-
tional capacity or limiting workload and preponing a
job’s run within the batch are examples of levers. By
business logic mean the interrelationships among jobs
which are defined by business imperatives at business
level and not at the IT level and cannot be arbitrarily
changed to meet the objectives.
1.1 Purpose of This Paper
The purpose of this paper is to propose an optimiza-
tion based approach to determine the smallest set of
levers to minimize SLA violations. Considerations
such as reducing the overall batch execution time and
other issues are not part of the scope of this paper
even though these issues are interrelated.
1.2 Organization of This Paper
This paper briefly discusses batch job system and its
ubiquitous nature in modern business organizations in
its introduction in section 1. Section 1 also discusses
the background literature and context of this study.
Section 2 discusses the methodology and section 3
consists of ILP (Integer Linear Programming) formu-
lation of the problem and the mathematical model.
Section 2 & 3 constitute the main body of the paper.
Section 4 reports and discusses the results produced
by the model on 2 sets of data-synthetic and real. Sec-
tion 5 concludes the paper with a pointer to the future
work as an extension of this study.
1.3 Literature
A part of this study corresponds to the field of parallel
job scheduling. The parallel job scheduling literature
broadly addresses both the temporal and spatial (pro-
cessor space) dimensions of job scheduling. We,
however, restrict this study to the temporal aspect of
job scheduling. Large number of batch jobs, complex
dependency structure and large solution space due to
multiple lever combinations make this problem chal-
lenging despite confining the scope of this study to
temporal dimension alone.
The primary purpose of this study is to realign a
given batch job system to maximize SLA compliance.
Job scheduling is one of the ways to realize the afore-
mentioned objectives. The study of computer archi-
tectures with parallel processors has prompted the de-
sign and analysis of algorithms for scheduling paral-
lel jobs. The studies in this area differentiate them-
selves based on the level of indigeneity in their mod-
els. Feitelson et al, (1997) have characterized studies
based on various aspects of batch job systems that are
incorporated in scheduling models. These aspects in-
clude partition specifications, job flexibility, pre-
emption support, amount of job and workload data
available, memory allocation and the optimization
objectives.
Models proposed in these studies try to optimize
one or more of the following objectives – throughput,
deadline misses (SLA non-compliance), completion
time (batch processing time), flowtime and tardiness.
These objectives are broadly interconnected to each
other. Some of these objectives closely follow each
other. Optimizing one of them can potentially opti-
mize others in similar conditions. Kellerer et al
(1996) and Leonardi and Raz (2007) have shown in
their work that a batch job system configuration with
optimal completion time would also have optimal
flow time under the same model constraints. Feitelson
et al (1997) argue that a good management policy for
a batch job system requires optimization of different
objectives over different time frames. For example,
during working hours, when users wait for comple-
tion of jobs, response time might be the most critical
objective. However, during non-working hours, sys-
tem throughput might be the most vital objective.
Also, there are a host of studies that consider multi
criteria optimization. Zhu and Heady (2000) have ad-
dressed the scheduling problem by considering both
throughput and completion time as objectives. The
model proposed in this paper considers the objective
of minimizing the aggregate deadline misses.
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
398

The next aspect of batch job systems that has been
extensively studied in the literature is partition speci-
fications. Batch jobs are executed on processors
which are architected in multiple ways. These archi-
tectures have a major bearing on the scheduling. Feit-
elson et al (1997) roughly classifies partition specifi-
cations into four types – fixed, variable, adaptive and
dynamic. While fixed partitions (Feldmann et al,
1994) can only be altered by a system reboot, variable
partition sizes can be determined at the time of job
submission. Adaptive partitions (Turek et al, 1992)
consider the job’s request for partition along with the
overall system load and allot the best possible parti-
tion based on a preset distribution policy. Dynamic
partition (Deng et al, 2000) sizes can change even
during the execution of jobs. Some batch job systems
have memory along with processing power as a re-
source constraint. Parsons and Sevcik (1996) and Se-
tia (1995) have taken memory into account in sched-
uling algorithms. As discussed earlier, our model
does not consider the spatial dimension (processor
space). The ever dropping costs combined with the
ease of leasing processing power and memory over
the cloud have made this constraint redundant over
the years (Bahl et al, 2007, Singh et al, 2013, Agarwal
et al, 2011 and Suter 2014).
Like processors, jobs too are categorized into four
kinds (Feitelson et al, 1997) depending on how they
are programmed. A rigid job has a processor(s) as-
signed and it runs on the same processor in every
batch. Also the processor requirement is not expected
to change during its execution. Moldable job’s pro-
cessor allotment is dynamic and is decided by the sys-
tem scheduler right before its execution. However,
the processor requirement remains constant through-
out the execution, similar to a rigid job. An evolving
job, as the name suggests, goes through multiple
phases where the processor requirement varies based
on the incoming workload. A malleable job is low on
criticality (Ex: maintenance jobs). It can be starved of
processors, if more critical jobs are in need of proces-
sors. Turek et al (1994) have studied the aggregate
impact of having more rigid jobs on the scheduling
efficiency. Mason et al (2002) have studied the posi-
tive impact of presence of moldable jobs and the de-
lay in the onset of a bottleneck like scenario. For this
study, we consider the first two kinds of jobs – Rigid
and Moldable jobs. Rigid jobs are referred to as criti-
cal jobs in this paper. Another aspect of batch job
scheduling is level of pre-emption supported by the
scheduler. No pre-emption indicates that once a job
starts its execution, it finishes without interruptions
while holding its assigned processors. With local pre-
emption, threads of a job may stop and resume their
execution albeit on the same processor unlike migrat-
able pre-emption (Deng et al, 2000), where threads
may be suspended on one processor and resumed on
another. Gang scheduling (Schwiegelshohn, 2004)
refers to suspension and resumption of all the threads
of a job simultaneously.
Most of the scheduling studies have not consid-
ered pre-emption in their models. Motwani et al
(1994) and Schwiegelshohn (2004) have studied the
overheads associated with pre-emption due to which
pre-emption is not often seen in actual batch job sys-
tems. In our study, we too have assumed that jobs
would finish their execution without any pre-emption.
Feitelson et al (1997)’s last characteristic to clas-
sify studies on batch job scheduling is the amount of
job related data used in models. While some of the
above mentioned aspects such as level of rigidity and
pre-emption support are job characteristics that are vi-
tal, any additional details about job can improve the
overall scheduling efficiency. Literature has seen the
use of job characteristics such as workload, parallel-
ism level and ‘run time’ in various studies (Agnetis et
al, 2004, Janiak et al, 2005). Our model incorporates
job characteristics such as ‘run time’, SLA definitions
and ‘start time’ constraints.
2 THE MODEL
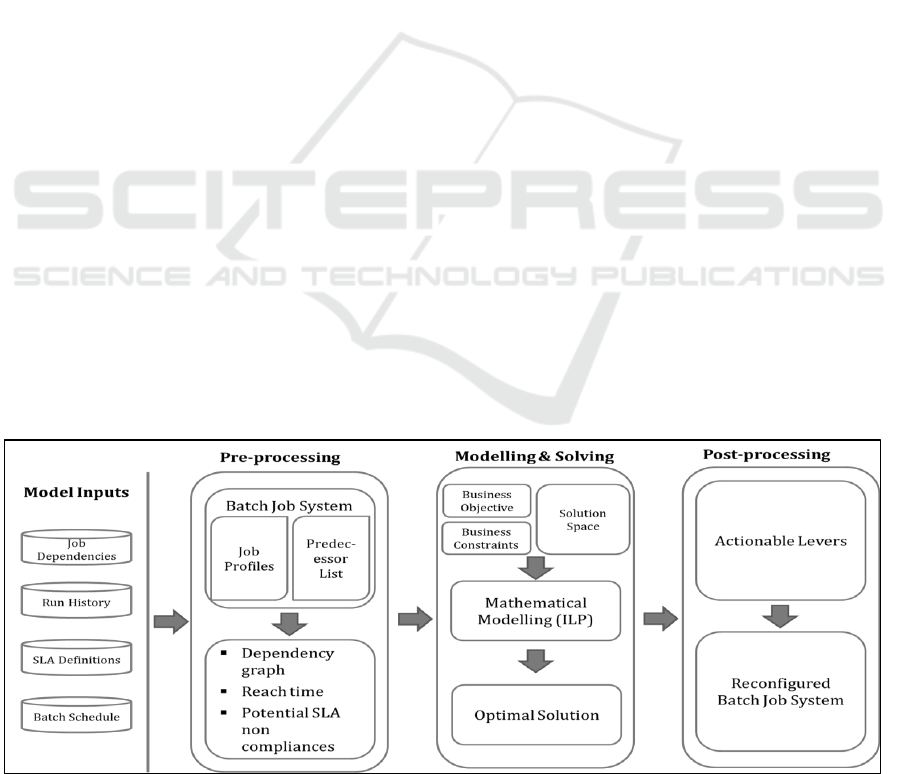
The schema in figure 2 shows the four components of
the model - inputs, pre-processing, post processing,
modelling & solving and post-processing.
2.1 Inputs
Inputs to the model include job dependencies, run his-
tory, SLA definitions, and batch schedule. Job de-
pendencies describe a graph that captures the depend-
ency relationship among jobs. These relationships are
defined by underlying business logic and cannot be
changed arbitrarily. Run history data comprises of job
‘start time’, ‘end time’, ‘from time’ and ‘run time’.
‘Start time’ is the time when job execution starts
while ‘end time’ is the time when job execution ends.
‘From time’ is a constraint that restricts the ‘start
time’ of a job and ‘run time’ is the amount of time
taken to complete the job execution. These data are
very important for efficient and feasible scheduling of
jobs. Batch schedule tells us what jobs of a batch are
scheduled to be executed on a particular day. Busi-
ness critical jobs in a given batch have SLA definition
and these jobs should be completed within the speci-
fied definition. Failure to do so results in non-compli-
ance.
SLA Non-compliance Detection and Prevention in Batch Jobs
399
2.2 Pre-processing
In the pre-processing module, we pool input data
from multiple sources such as job and dependency
data tables, transaction history, batch schedule and
SLA definitions. We clean these data sets to ensure
data consistency, completeness and uniformity. This
module comprises of the following sub-modules.
2.2.1 Job Profiles
Job profiles are the collection of individual job char-
acteristics that are useful in scheduling. Each job pro-
file includes ‘job name’, ‘run time’, ‘from time’, crit-
icality and SLAs (if defined).
2.2.2 Predecessor List
The predecessor list represents the dependencies
among the jobs. A job can only start executing if all
of its predecessor jobs are executed. It captures the
relationship between jobs.
2.2.3 Dependency Graph
By using job profiles and dependency list, we form a
directed graph called dependency graph, where each
node represents a job and an edge represents the prec-
edence relationship. This helps in visualising the
batch job system as a graph and thereby letting us use
graph theoretic approaches to achieve the objectives.
2.2.4 ‘Reach Time’
We define a metric called ‘reach time’ for each job. It
is defined as the earliest time epoch a job can start
execution. This metric helps us identifying the poten-
tial SLA non-compliant jobs by comparing ‘reach
time’ and SLAs. For a job (j), the ‘reach time’ (j) can
be calculated from the following equation.
(1)
2.2.5 Potential SLA Non-compliance
We identify the jobs that are likely to violate SLAs
defined on them using ‘reach time’ and SLAs. Our
objective is to keep the non-compliance as minimum
as possible. Once we identify these potential SLA
non-compliant jobs, we find the optimal set of levers
to minimize SLA non-compliance.
2.3 Modelling and Solving
In this module, we discuss about business objectives,
business constraints and solution space. Thereafter
we discuss the mathematical model formulation and
solving.
2.3.1 Business Objectives
The business objective that we are trying to achieve
here is minimization of SLA non compliant jobs with
minimum impact on business logic. The SLAs are
defined on ‘‘from time’’ and ‘‘end time’’ of jobs. For
a batch job system, it is very important to meet these
SLAs as a batch may be dependent on the outcomes
of another batch. The subsequent batch cannot be
executed if its predecessor batch is not yet completed.
Delay in a batch leads to delays in its subsequent
batches.
Figure 2: The Methodology Schema.
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
400

2.3.2 Business Constraints
Business constraints are generally derived from the
jobs relationships and requirements. A typical busi-
ness constrains could be something like, “a job can
start only after its defined ‘from time’”; “a job can
start only after all its predecessors are completed” etc.
If a job or dependency is defined as critical then it
cannot be perturbed.
2.3.3 Solution Space and Optimal Solution
The following levers can be used to meet the stated
business objective.
The amount of time by which a job can be
preponed.
The fraction by which a job’s ‘run time’ can be
reduced.
Whether a job needs to be deleted from the cur-
rent batch.
Whether a dependency can be removed.
The solution space is comprised of all possible com-
binations of these levers. For example, if the ‘from
time’ of a job is 1000 seconds the first lever can take
any values between 0 and 1000. Similarly, for a given
job, the second lever can assume any value between
0 and 100. For the fourth lever, the combinations can
go as high as 2
n
with ‘n’ being the number of depend-
encies in the system. Putting all these together, the
size of solution space of 1000 jobs of a batch job sys-
tem can run into billions. The challenge is to find an
optimal solution within reasonable time limits.
3 ILP FORMULATION
The general structure of the proposed optimization
model is to minimize SLA non-compliance with least
impact on business logic, subject to ‘from time’ and
dependecy constraints. The proposed optimization
model is an Integer Linear Program (ILP). An ILP
guarantees the global optimal solution if it is feasible
(Wolsey et al, 2014; Brucker, 2007). Integer Linear
Program (ILP) is a tool for solving optimization
problems. The first step towards modeling an
optimization problem is identifying inputs and
decision variables. The nature of the decision
variables determines the problem type (continuous,
integer or mixed integer). The problem is then
formulated by identifying objectives and its
constraints. When both objectives and constraints are
linear, and decision variables are integer the problem
is called ILP. Operations research practitioners have
been formulating and solving ILPs since the 1940s
(Klotz and Newman, 2013a) However, in recent
years, the availability of large computing power and
development of powerful optimization solvers has
empowered practitioners to be able to solve complex
real-world problems(Klotz and Newman, 2013b).
This work uses ILP to find the smallest set of levers
that minimizes SLA violations. The input parameters
of the proposed model are as follows.
cJ = set of critical jobs
cE = set of critical edges
The decision variables of the proposed model are
shown in table 1. The objective of the proposed
mathematical model is to minimize SLA non-
compliance with minimal impact on business logic.
So, the objective function has two parts. First part
() takes care of the SLA non-
compliance and the second part
() ensures minimum
possible changes to the existing system configuration.
The objective function is given below.
(2a)
(2b)
We have two types of SLA non-compliance, ‘end
time’ SLA non-compliance
) and ‘start time’
SLA non-compliance (
). A very large number ‘M’
is multiplied to , that ensures
that the model will minimize the non-compliance
whenever feasible. We have four levers (delete a job
(
), delete a dependency (
), reduce ‘run
time’/workload (
) and reduce ‘from time’ (
)) to
achieve the objective. We want to use theses levers as
minimimum as possible and minimize the SLA non-
compliance. The second term
() ensures this objective.
3.1 Constraints
The model needs to consider following set of con-
straints to obtain optimal set of levers that minimizes
SLA non-compliance.
SLA Non-compliance Detection and Prevention in Batch Jobs
401

Table 1: Decision Variables.
.
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
3.1.1 Sacrosanct Constraints
There are a few business critical jobs or dependen-
cies, which cannot be altered. Constraints below en-
sure that we do not delete a business critical job from
the current batch or reduce its workload or ‘run time’.
Constraint (15) puts bound on ‘runtime’ reduction of
a job. Constraint (16) ensures that no business critical
dependencies are deleted.
(14)
(puts bound on ‘run time’
reduction of a job)
(15)
(16)
3.1.2 Reach Time Constraints
We define ‘reach time’ (
) of a job j as the
earliest time epoch, when the job j can start executing.
Constraint (17) ensures that the job j can start execut-
ing after it’s ‘‘from time’’ only. Constraint (18)
makes sure that the job j can start executing only after
all its predecessor jobs are executed.
(17)
(18)
3.1.3 SLA Non-compliant Identifier
Constraints
Constraints (19) and (20) ensure that when a job j
violates ‘end time’ SLA (
), it is registered through
the decision variable
. Simillarly, constraints (21)
and (22) ensure ‘start time’ SLA (
) violation is
recorded in variable
.
(19)
(20)
(21)
(22)
3.1.4 Auxiliary Constraints
These constraints help in estabilishing the
relationships between different variables. Constraint
(23) records if ‘run time’ reduction is required for job
j. Constraints (24) – (26) are the equivalent of the
non-linear constraint,
. The varia-
ble,
, captures the ‘run time’ reduction for job j
if dependency between job j and k are not deleted.
This value is required for ‘reach time’ calculation.
(23)
(24)
(25)
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
402

(26)
Constraints (27)-(29) are the equivalent of the
non-linear constraint,
.
The variable,
, updates the ‘reach time’ for job j
depending upon the dependency between job k & j.
(27)
(28)
(29)
Constraints (30)-(32) are the equivalent of the
non-linear constraint,
. The variable
captures whether job j is SLA complaint or not.
(30)
(31)
(32)
We discuss the model solving approach in the
following sub-subsection.
3.2 Optimal Solution
The formulated mathematical model is an Integer
Liner Program (ILP). We have coded the proposed
model using Python-PuLP to create an optimizer
consumable input format (.lp file). This LP file is
passed to the optimization solver for optimal solution.
We have used CBC solver (open source) for our
study. More efficient, proprietary solvers (Cplex,
Gurobi etc.) can also be used to obtain the optimal
solutions.
3.3 Post Processing
The post-processing module is further divided into
two sub-modules. Actionable levers and reconfigured
batch job systems.
3.3.1 Actionable Levers
We translate the obtained optimal solutions, which is
expressed in mathematical terms into implementable
actions such as identifying the jobs that can be
postponed to another batch, executing batch jobs
partially by reducing the workload or running the job
on multiple cores simultaneously, identifying the
dependencies that can be relaxed or identifying those
jobs whose ‘from time’ constraint can be relaxed.
3.3.2 Reconfigured Batch Job Systems
Once we identify all the actionable levers we re-
configure the batch job system’s run to achieve the
stated objective by updating the job and dependency
tables.
4 RESULTS AND DISCUSSION
4.1 Illustration with Synthetic Data
To illustrate the method presented in the previous sec-
tion, we use two different sets of data. The first illus-
tration is on synthetic data for demonstrating solu-
tion’s correctness. The second illustration is on a real
batch job system of a large financial institution. The
batch job system shown in figure 3 comprises of 14
jobs. These jobs vary in terms of attributes such as
‘run time’, ‘from time’, SLA definitions and critical-
ity. ‘Run time’ of all the jobs and the interdependen-
cies among them are shown in figure 3. For example,
job N1 cannot be scheduled for a run unless jobs J3
and J4 are executed. Job criticality is indicated by en-
circling nodes in red. Jobs J1, J2 and J5 are critical
(Figure 3) and cannot be used as levers to perturb the
system. Jobs J11 and J12 in red. These jobs have pre-
defined ‘end time’ SLAs and are not expected to be
used as levers. The dependencies between jobs in this
case are also considered critical. Next to each node in
the dependency graph is the ‘end time’.
In the as-is configuration of this system, jobs J11
and J12 are violating their SLA definitions by 7 and
14 time units respectively. Job J5 has ‘from time’ de-
fined at 180
th
time unit, which means even if job J5’s
predecessors finish execution before 180
th
time unit,
it cannot start execution. As seen in this case, job N1
completes execution at 80
th
time unit but, due to the
‘from time’ constraint, job J5 had to wait for 100
more time units. Although, such constraints are de-
rived from business logic and often unalterable, it is
vital to identify and minimize such slacks to reduce
spikes in CPU utilization.
With the objective being minimization of SLA non-
compliance, there are multiple feasible solutions.
However, the ‘Impact on Business Logic’ component
of the objective function given in section 3 ensures
that lever usage is confined. The solution obtained
from the model is to reduce the ‘run time’ of job J5
by 70% (from 20 mins to 6 mins). In cases where
there is a cap on the amount of ‘run time’ reduction,
the feasible solution set shrinks. When we set a cap
on ‘run time’ reduction at 50%, the optimal solution
would then be to reduce the ‘run time’ of jobs J5 and
SLA Non-compliance Detection and Prevention in Batch Jobs
403
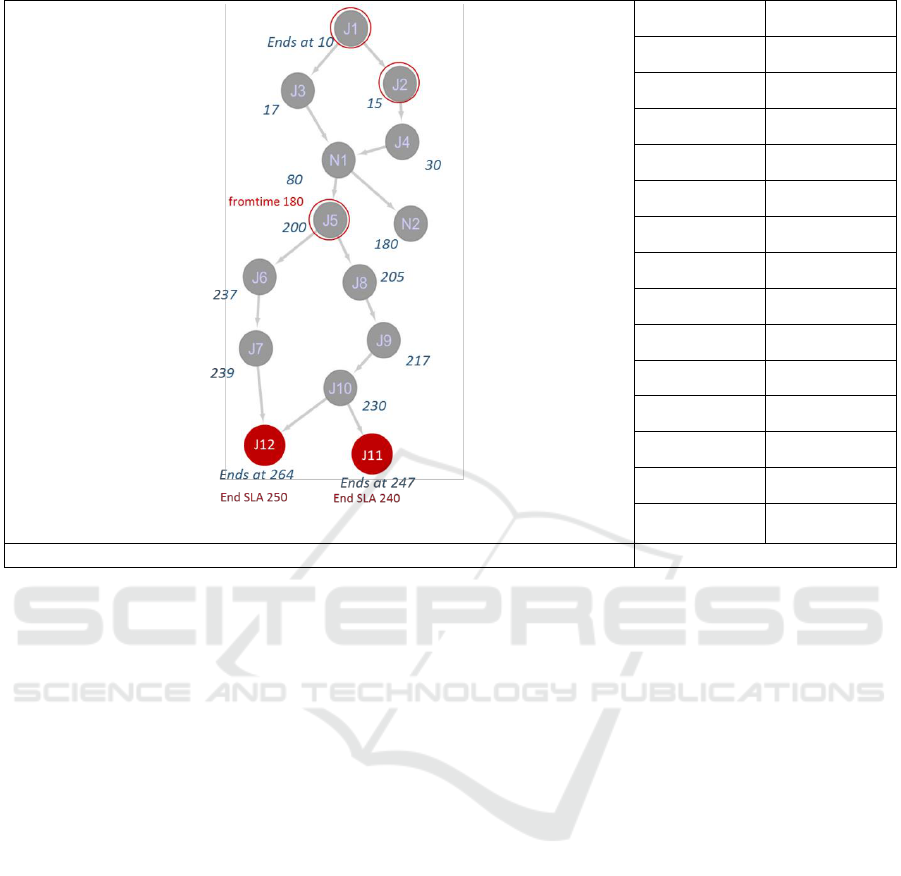
Figure 3: Dependency graph and job ‘run time’ with synthetic data.
J6 by 50% and 10% respectively. Both these solutions
are as expected.
4.2 Illustration with Real Data
We tested the model on a real batch job system with
518 jobs and 738 interdependencies. Due to a pre-
scheduled maintenance activity over the weekend
batch runs, there might be an adverse impact on SLA
compliance. Around 14 jobs are expected to have a
50% increase in their ‘run time’. The model has iden-
tified 18 SLA violations as a result. Some other im-
portant characteristics of this system include- 62 jobs
with ‘from time’ constraints, 21 critical jobs, 137 crit-
ical dependencies and 35 jobs with ‘end time’ SLA
definitions.
Figure 4 shows the partial dependency graph of
the batch system used in this illustration. The node
size depicts the ‘run time’ of a job. The nodes marked
in blue are the jobs affected by the scheduled mainte-
nance activity and are expected to see an increase in
their ‘run time’. The nodes marked in yellow are the
ones expected to violate SLAs. The optimal solution
suggested by our model includes deletion of 3 jobs,
reduction of ‘run time’ of 2 jobs while preponing the
‘from time’ of 2 jobs. However, despite these inter-
ventions, the total SLA violations could only be
brought down from 18 to 4. This configuration of
batch system makes 100% SLA compliance an unat-
tainable target.
5 CONCLUSION
In this study, we proposed an optimizer for batch job
systems that maximizes SLA compliance with mini-
mum possible impact on the business logic. Although,
there exists an extensive body of literature on solu-
tions to achieve this objective, the levers used to do
so are mostly focussed on job scheduling. Our study
considers a more practical approach wherein a wider
range of levers such as Job and Dependency deletion
and ‘run time’ reduction are also considered while de-
signing the optimizer. By taking these additional lev-
ers into consideration, the solution space increases
many fold. Despite this, our approach finds the opti-
mal set of levers within reasonable time limits as we
have modeled the complex optimization problem as
an integer linear program (ILP). Linear formulation
guarantees the global optimal solution and has better
computational efficiency than the non-linear models.
In its current state, the model can handle batch job
systems of size around 1000 jobs and 1800 depend
Job
‘run time’
J1
10
J2
5
J3
7
J4
15
N1
50
N2
100
J5
20
J6
37
J7
2
J8
5
J9
12
J10
13
J11
17
J12
25
Dependency Graph
Job run times
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
404
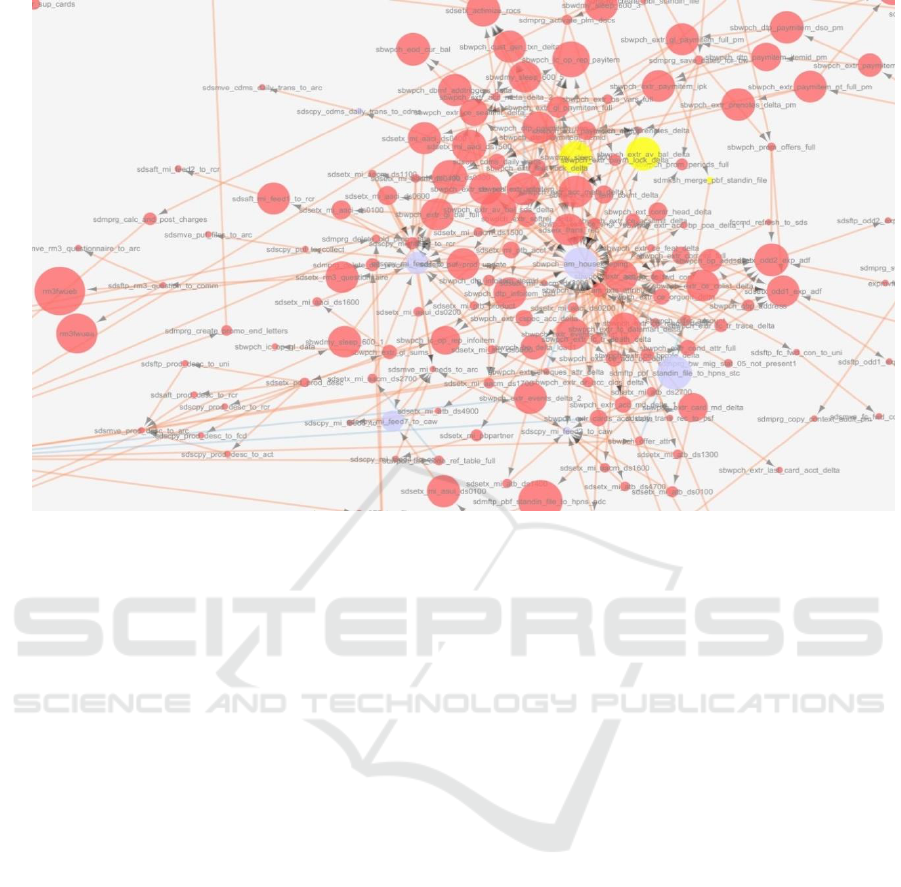
Figure 4: A real batch job system.
encies. Beyond this, the ‘run time’ shoots up substan-
tially. An interesting direction for future research
would be to build heuristics that intelligently prune
the solution space without compromising the optimal-
ity of the solution.
A major consideration of batch system optimizers
is their ‘run time’. As described in the previous sec-
tion, we have programmed this solution on Python-
PuLP with CBC solver. When implemented on a
2.6GHz, i5 processor with 4GB RAM, the solution
takes less than 2 minutes to handle 1000 jobs and
1800 dependencies batch system to find the optimal
solution.
REFERENCES
Agnetis, A., Alfieri, A., Nicosia, G., 2004. A heuristic ap-
proach to batching and scheduling a single machine to
minimize setup costs. Computers & Industrial Engi-
neering 46, 793-802.
Agrawal, R. and Sadaphal, V., 2011. “Batch systems: Opti-
mal scheduling and processor optimization”, In Pro-
ceedings of 18th International Conference on High Per-
formance Computing (HiPC), Bangalore, India.
Bahl, P., Chandra, R., Greenberg, A., Kandula, S., Maltz,
D., and Zhang, M. 2007. "Towards highly reliable en-
terprise network services via inference of multi-level
dependencies", ACM SIGCOMM Computer Communi-
cation Review (37:4), p. 13(doi: 10.1145/1282427.
1282383).
Brucker, P. 2007. Scheduling algorithms, Berlin [u.a.]:
Springer.
Chakrabarty, K. 2000. "Test scheduling for core-based sys-
tems using mixed-integer linear programming", IEEE
Transactions on Computer-Aided Design of Integrated
Circuits and Systems(19:10), pp. 1163-1174(doi:
10.1109/43.875306).
Deng, X., Gu, N., Brecht, T., and Lu, K. 2000. "Preemptive
Scheduling of Parallel Jobs on Multiprocessors", SIAM
Journal on Computing (30:1), pp. 145-160(doi:
10.1137/s0097539797315598).
Ed Klotz, Alexandra M. Newman. 2013a, Practical guide-
lines for solving difficult mixed integer linear pro-
grams, In Surveys in Operations Research and Manage-
ment Science, Volume 18, Issues 1–2, Pages 18-32,
ISSN 1876-7354
Ed Klotz, Alexandra M. Newman. 2013b, Practical guide-
lines for solving difficult linear programs, In Surveys in
Operations Research and Management Science, Vol-
ume 18, Issues 1–2, , Pages 1-17, ISSN 1876-7354
Feitelson, D., Rudolph, L., Schwiegelshohn, U., Sevcik, K.,
and Wong, P. 1997. "Theory and practice in parallel job
scheduling", Job Scheduling Strategies for Parallel
Processing, pp. 1-34(doi: 10.1007/3-540-63574-2_14).
Feldmann, A., Sgall, J., and Teng, S. 1994. "Dynamic
scheduling on parallel machines", Theoretical Com-
puter Science (130:1), pp. 49-72(doi: 10.1016/0304-
3975(94)90152-x).
Janiak, A., Kovalyov, M.Y., Portmann, M.C., 2005. Single
machine group scheduling with resource dependent
setup and processing times. European Journal of Oper-
ational Research 162, 112-121.
SLA Non-compliance Detection and Prevention in Batch Jobs
405

Kellerer, H., Tautenhahn, T., and Woeginger, G. 1999.
"Approximability and Nonapproximability Results for
Minimizing Total Flow Time on a Single Machine",
SIAM Journal on Computing (28:4), pp. 1155-
1166(doi: 10.1137/s0097539796305778).
Leonardi, S., and Raz, D. 2007. "Approximating total flow
time on parallel machines", Journal of Computer and
System Sciences (73:6), pp. 875-891(doi:
10.1016/j.jcss.2006.10.018).
Mason, S.J., Fowler, J.W., Carlyle, W.M., 2002. A modi-
fied shifting bottleneck heuristic for minimizing total
weighted tardiness in complex job shops. Journal of
Scheduling 5, 247-262.
Parsons, E., and Sevcik, K. 1996. "Benefits of speedup
knowledge in memory-constrained multiprocessor
scheduling", Performance Evaluation (27-28), pp. 253-
272(doi: 10.1016/s0166-5316(96)90030-9).
Schwiegelshohn, U. 2004. "Preemptive Weighted Comple-
tion Time Scheduling of Parallel Jobs", SIAM Journal
on Computing (33:6), pp. 1280-1308(doi:
10.1137/s009753979731501x).
Setia, S.K., 1995, April. “The interaction between memory
allocation and adaptive partitioning in message-passing
multicomputers”, In Workshop on Job Scheduling
Strategies for Parallel Processing (pp. 146-164).
Springer, Berlin, Heidelberg.
Singh, R., Shenoy, P., Natu, M., Sadaphal, V., and Vin, H.
2013. "Analytical modeling for what-if analysis in com-
plex cloud computing applications", ACM SIGMET-
RICS Performance Evaluation Review (40:4), p.
53(doi: 10.1145/2479942.2479949).
Suter, F., 2014. Bridging a Gap Between Research and Pro-
duction: Contributions to Scheduling and Simulation
(Doctoral dissertation, Ecole normale supérieure de
Lyon).
Turek, J., Wolf, J., Pattipati, K., and Yu, P. 1992. "Sched-
uling parallelizable tasks", ACM SIGMETRICS Perfor-
mance Evaluation Review (20:1), pp. 225-236(doi:
10.1145/149439.133111).
Wolsey, L., and Nemhauser, G. 2014. Integer and Combi-
natorial Optimization, Hoboken: Wiley.
Zhu, Z., Heady, R.B., 2000. Minimizing the sum of earli-
ness/tardiness in multi-machine scheduling: a mixed in-
teger programming approach. Computers & Industrial
Engineering 38, 297-305
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
406
