
Multi-modal Medical Image Registration by Local
Affine Transformations
Liliana Lo Presti and Marco La Cascia
DIID - University of Palermo, Italy
Keywords:
Image Registration, Mutual Information, Medical Images.
Abstract:
Image registration is the process of finding the geometric transformation that, applied to the floating image,
gives the registered image with the highest similarity to the reference image. Registering a pair of images
involves the definition of a similarity function in terms of the parameters of the geometric transformation
that allows the registration. This paper proposes to register a pair of images by iteratively maximizing the
empirical mutual information through coordinate gradient descent. Hence, the registered image is obtained by
applying a sequence of local affine transformations. Rather than adopting a uniformly spaced grid to select
image blocks to locally register, as done by state-of-the-art techniques, this paper proposes a method which
is similar in spirit to boosting strategies used in classification. In this work, a probability distribution over
the pixels of the registered image is maintained. At each pixel, this distribution represents the probability that
a local affine transformation of a block centered on this pixel should be computed to improve the similarity
between the registered and the reference images. The distribution is updated iteratively during the registration
process to move probability mass towards pixels unaffected by the estimated local transformation. The paper
presents preliminary results by a qualitative evaluation on several pairs of medical images acquired by different
sources.
1 INTRODUCTION
Image registration, also known as image alignment, is
the process of finding the geometric transformation T
that, applied to the floating image f , gives the regis-
tered image r with the highest similarity to the refe-
rence image g. Image registration is used in medical
imaging for allowing comparative and/or diachronic
studies of the patients. Physicians can take advantage
of image registration to monitor the course of diseases
such as Alzheimer or multiple sclerosis cases, to com-
pare the anatomical structures of different patients or
to study anomalies in groups of individuals (Rueckert
and Schnabel, 2010).
In the general image registration pipeline, an ob-
jective function is defined in terms of the parameters
of the geometric transformation that transforms the
floating image into the registered image. A numeri-
cal optimization algorithm is then applied to optimize
the objective function with respect to the geometric
transformation parameters.
State-of-the-art algorithms for image registration
mainly differs in the kind of geometric transformation
that is estimated for aligning the images and in the ob-
jective function. In particular, the work in (Ardizzone
et al., 2007) applies a non-rigid transformation obtai-
ned by piecewise affine transformations estimated by
local mutual information maximization. An image
pyramidal approach allows a coarse-to-fine details re-
gistration. At each level of the pyramid, blocks of the
floating image are aligned to the reference image, and
changes in pixel coordinates are accumulated in a de-
formation field, which stores the displacement along
the x and y directions (columns and rows in the image
respectively) of each pixel of the floating image. To
avoid a checkerboard effect at the edges of the aligned
blocks on the registered images, the pixel displace-
ments originated by the local affine transformation are
smoothed by a filter before accumulating them into
the deformation field.
The main limitation of the work in (Ardizzone
et al., 2007) is the use of a uniform grid to estimate
local affine transformations. Image blocks extracted
based on the uniform grid are registered several times
and, eventually, the step of the grid is decreased in or-
der to deal with finer details of the images.
This approach has two main drawbacks: first, regi-
ons of the floating image that are already well aligned
534
Presti, L. and Cascia, M.
Multi-modal Medical Image Registration by Local Affine Transformations.
DOI: 10.5220/0006656405340540
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 534-540
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
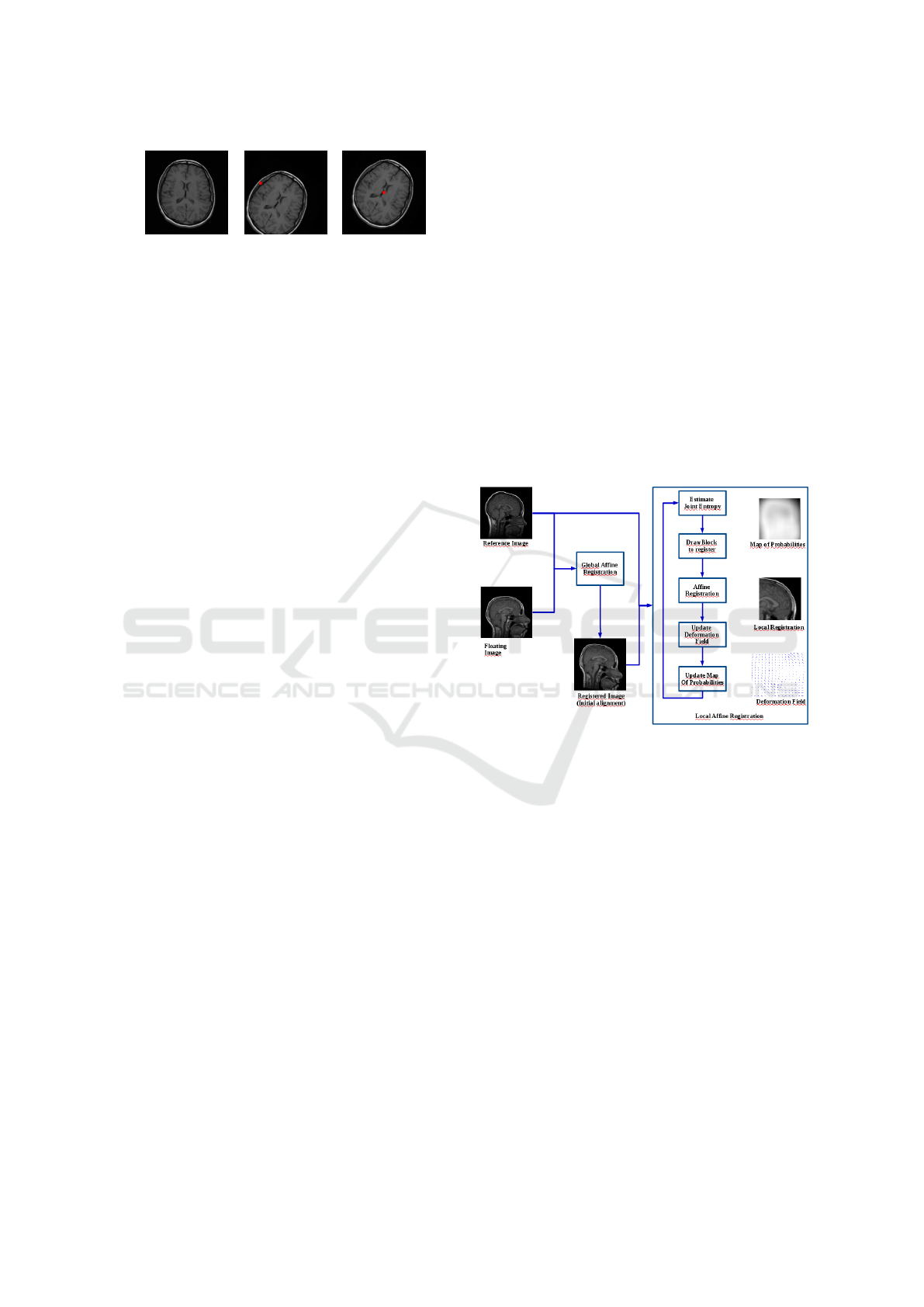
a) b) c)
Figure 1: Effect of changing the origin of the coordinate sy-
stem when applying a transformation. a) Original image; b)
and c) images obtained by applying a rotation of 30 degrees
while changing the origin of the coordinate system, which
is represented by a red dot on the resulting images.
to the reference image may be processed several times
by the method without gaining any benefits in terms
of registration accuracy but, rather, growing the com-
putational complexity of the registration process; se-
cond, geometrical transformations are applied in a lo-
cal coordinate system centered in the selected block.
Local transformations are affected by the choice of
the origin of such local coordinate system. A fixed
uniform grid strongly limits the flexibility of the pie-
cewise affine transformations. To make clear the pro-
blem, we show in Fig. 1 the effects of the same ro-
tation transformation applied in different coordinate
system whose origin is depicted by a red dot. The use
of a uniform grid limits the possibility of changing
the origin of the coordinate system, thus limiting the
strength of the deformation that can be achieved by
adopting a piecewise affine transformation.
In this paper, we propose a method which is simi-
lar in spirit to boosting strategies used in classifica-
tion. In boosting, a set of weak classifiers is trained
to build stronger classifiers. The weak classifiers are
trained sequentially on samples of the training set that
are more difficult to classify. This is in general achie-
ved by keeping a distribution on the training exam-
ples; this distribution is used to draw examples to train
a weak classifier (Zhu et al., 2009). The distribution
is update based on the weak classifier performance by
moving probability mass towards those samples that
are hard to classify.
In a similar way, in this paper we propose to keep a
distribution over the pixels of the registered image. At
each pixel, this distribution represents the probability
that a local affine transformation of a block centered
on this pixel should be computed to improve the simi-
larity between the registered and the reference ima-
ges. The distribution is updated iteratively during the
registration process to move probability mass towards
pixels unaffected by the estimated local transforma-
tion.
Local affine transformations are estimated by em-
pirical mutual information maximization based on the
seminal work in (Viola and Wells, 1997).
Fig. 2 shows the pipeline of the proposed method.
The advantages of the proposed registration technique
are mainly two:
• a local transformation is computed based on the
probability that it might improve the similarity of
registered and reference images;
• image registration is not constrained by a uniform
grid, which adds more flexibility to the registra-
tion process.
We present preliminary results of our technique on a
set of pairs of images acquired with different modali-
ties. The plan of the work is as follows. In section 2
we review work on image registration; in section 3 we
define the empirical mutual information that we adopt
as objective function; in section 4, we present the
adopted geometric transformation, while in section 5
we describe the optimization procedure. In section 6
we present experimental results and, finally, in section
7 we present conclusions and future work.
Figure 2: After pre-processing the images (noise reduction
and estimation of a global affine transformation), the met-
hod estimates a sequence of local affine transformations.
Based on the values of local joint entropies of the current
solution and the reference image, a map of probabilities is
computed. The map is used to draw the center of the image
blocks to align. Hence, a local affine transformation is es-
timated by maximizing the local empirical mutual informa-
tion. The local deformation is then used to update the de-
formation field. The process is repeated till convergence.
2 RELATED WORK
Image registration is a fascinating field that has at-
tracted much attention in past years. Several methods
have been proposed in literature, and they often dif-
fer in the initial hypotheses or prior knowledge avai-
lable to solve the problem, in the adopted geometri-
cal transformation or in the objective function to op-
timize.
Landmark and surface based registration (Crum
et al., 2004; Fornefett et al., 2001) define a set of
Multi-modal Medical Image Registration by Local Affine Transformations
535

points or surfaces correspondences between the two
images, and use this information to extend the corre-
spondences to all other pixels in the floating image
by interpolation. Identification of correspondences
in images acquired by different modalities (such as
PETs) is not always straightforward. Another appro-
ach is that of considering force fields (Pekar et al.,
2006) or some physical model capable of representing
the registration problem in terms of partial differen-
tial equations (i.e. in viscous fluid approach, image is
modeled like a fluid and deformation comes from the
solution of the Navier-Stokes equation (Fookes and
Maeder, 2003)).
In works such as (Ardizzone et al., 2007; Viola
and Wells, 1997), there are no assumptions about ge-
ometric shapes and spatial positions of the structures
in the two images but, instead, it is assumed some re-
lation among their intensity distribution functions.
This is especially convenient when dealing with
medical images. Indeed, in mono-modal registration,
images are acquired with the same type of exam (for
example MR-PD); In this case, anatomical structures
are represented with similar intensity distribution and
comparison of the images to align can be performed
by estimating the mean squared error of the intensities
at the aligned pixels. Instead, in multi-modal registra-
tion, images are acquired by different modalities (for
example MR-PD versus MR-T1). In this case, since
the same anatomical structure is characterized by dif-
ferent intensity distributions in the two images, cri-
teria based on statistical properties of the gray levels
distribution function can be adopted.
The seminal work in (Viola and Wells, 1997) pre-
sents an image alignment technique derived from in-
formation theory. The technique adopts a framework
for estimating the empirical entropy from a set of data
samples. As we will detail in Section 3, entropy is not
easy to differentiate. However, by adopting a Parzen
window density estimation technique to approximate
the gray level distribution of an image, empirical en-
tropy can be made differentiable. Mutual information,
which is a function of entropies, becomes differenti-
able as well. Nonetheless, optimization of the empi-
rical mutual information is computationally intensive
especially when huge sample sets are used to obtain
a reliable estimation of the mutual information. Vi-
ola and Wells proposed then to use stochastic gradient
descent to optimize empirical mutual information. At
each step of their algorithm, a small sample set is used
to align the images. Of course, the gradient they use to
optimize their objective function is only an inaccurate
estimate of the true gradient, but the expected value
of the gradients will tend to approach the true gra-
dient. Nowadays, we know that stochastic gradient is
very effective in numerical optimization of non-linear
functions of a large number of parameters.
Our work is inspired to both the work in (Ardiz-
zone et al., 2007; Viola and Wells, 1997). We have
adopted the geometrical transformation proposed in
(Ardizzone et al., 2007), which is a piecewise affine
transformation. Effects of the estimated local trans-
formations are accumulated in a deformation field
that stores, for each pixel of the registered image,
the position of the corresponding pixel in the floating
image. In (Ardizzone et al., 2007), local transforma-
tions are estimated by maximizing the mutual infor-
mation computed in image blocks. However, mutual
information is highly non-linear and is not differen-
tiable without a parametric model of the gray level
distribution. Hence, in (Ardizzone et al., 2007), a
gradient-free optimization algorithm is used to opti-
mize the mutual information. Such kind of approach
is heavily affected by the initial solution to the op-
timization problem. A more reliable initial solution
is found by applying a coarse-to-fine registration stra-
tegy, which is implemented in (Ardizzone et al., 2007)
by using a pyramid of images.
In (Yang et al., 2015), optimization of the nor-
malized mutual information is carried out by combi-
ning the limited memory Broyden-Fletcher-Goldfarb-
Shanno with boundaries (L-BFGS-B) with cat swarm
optimization (CSO).
In our work, rather than optimizing the mutual in-
formation, we follow the work in (Viola and Wells,
1997) and optimize the empirical mutual information.
In contrast to the work in (Viola and Wells, 1997), we
estimate a sequence of local transformations that are
used to compute the deformation field of the registe-
red image. In contrast to (Ardizzone et al., 2007), we
do not adopt a uniform grid to select the image blocks
to register. Instead, we use an approach that is similar
in spirit to boosting, and sample the image block to
register during the alignment process.
3 EMPIRICAL MUTUAL
INFORMATION
Entropy H(X) is a measure derived by information
theory that allows us to quantify the randomness of a
random variable X, and is defined as follows:
H(X) = −
∑
∀x
p(X = x) · log p(X = x) (1)
In image registration, the joint entropy H(X, Y ) is
used to measure the extent to which two random va-
riables – Y, the gray levels in the registered image,
and X, the gray levels in the reference image – are de-
pendent. Low values of the entropy indicate a strong
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
536

dependency of Y and X, while higher values indicate
a higher level of randomness.
Mutual information is a measure of the reduction
in the entropy of Y given X (Viola and Wells, 1997),
and is defined as follows:
I(X, Y ) = H(Y )−H(Y |X) = H(X)+H(Y )−H(X, Y ).
(2)
Mutual information has already been adopted in
image registration (Yang et al., 2015; Ardizzone et al.,
2007; Viola and Wells, 1997) and it showed to be
highly non-linear and difficult to differentiate. Such
difficulty arises from the lack in our problem of a pa-
rametric representation of the probability distribution
of the gray levels of the image. This affects the opti-
mization process, and techniques that do not require
an explicit gradient of the objective function are of-
ten adopted. As an example, the work in (Ardizzone
et al., 2007) adopts the Nelder-Mead simplex-based
optimization algorithm (Nelder and Mead, 1965).
However, without gradient information, the found so-
lution strongly depends on the initial guess, which can
be hard to find in image registration.
To deal with such difficulty, Viola proposed in (Vi-
ola and Wells, 1997) to adopt an approximated but
differentiable expression of the mutual information
that relies on empirical entropies. Given a sample set
A, the empirical entropy of a variable X is defined as
the expected value of the log-likelihood:
H
A
(X) = −E
A
[log p(X)] = −
1
|A|
∑
x∈A
log p(x). (3)
However, this representation is still difficult to diffe-
rentiate and, in (Viola and Wells, 1997) it is proposed
to adopt Parzen window density estimation(Bishop,
2006) to approximate the probability distribution of
X.
Given another sample set B, Parzen window den-
sity estimation allows to approximate a distribution as
follows:
P
∗
(X = x) =
1
|B|
∑
x
b
∈B
R(x − x
b
) (4)
where R(·) is a density function, such as a Gaussian
density function (G(·)).
The empirical entropy estimated by Parzen win-
dow density estimation takes the following form:
H
∗
(X) = −
1
|A|
∑
x
a
∈A
log
1
|B|
∑
x
b
∈B
G(x
a
− x
b
). (5)
Such form of the empirical entropy is differentia-
ble and is adopted in this paper to estimate the empi-
rical mutual information.
4 NON-RIGID IMAGE
REGISTRATION
Figure 2 shows the approach we followed to com-
pute a sequence of local affine transformations. First,
a probability map is computed by normalizing the
values of the joint entropy of the current registered
image and the reference image within a block.
The map is used to sample a pixel. An image
block centered on the sampled pixel is then conside-
red. From this block, the sets A and B are sampled
and used to estimate the empirical mutual informa-
tion. A local affine registration is then performed by
applying coordinate gradient descent. Once the opti-
mal local transformation has been estimated, it is used
to update the global deformation field by smoothing
the effects of the transformation outside the registe-
red image block.
The probability map is then updated by decreasing
the values of the probabilities of the pixels within the
registered image block. The whole process is repeated
by sampling a new pixel point and registering a new
image block.
In the following we provide more details about
each of the above mentioned steps.
4.1 Affine Transformation
In image registration, the goal is finding the linear
transformation T that allows to map a pixel x
reg
of
the registered image to a pixel x
f loat
in the floating
image, that is
x
f loat
= T · x
reg
. (6)
Since coordinate pixel should be integer, the gray le-
vel to be assigned to the pixel x
reg
is estimated by
interpolating the gray levels of the pixels in a neig-
hborhood of the point x
f loat
. Nearest neighbor or bi-
linear interpolation are often used to limit computati-
onal complexity of the registered image estimation.
Affine transformations are linear transformations
that originate from a combination of scaling, rotation,
shearing and translation transformations. An affine
transformation can be represented by a 3 × 3 matrix
and is applied to the homogeneous coordinates of the
pixels.
In our implementation, we have considered affine
transformations that can be represented as a composi-
tion of simpler geometric transformations. For exam-
ple, a geometric transformation T might be estimated
as follows:
T = R(θ) · S
h
(k) · S(s
x
, s
y
) · T (t
x
, t
y
), (7)
where R(θ) is a rotation matrix that rotates the image
by an angle θ counter-clockwise; S
h
(k) performs a
Multi-modal Medical Image Registration by Local Affine Transformations
537

shearing transformation; S(s
x
, s
y
) performs a scaling
in the x and y directions; T (t
x
, t
y
) does perform a
translation transformation of the image.
Differently than (Ardizzone et al., 2007), where an
affine transformation is represented by 6 parameters
representing the first two rows of matrix T, in this pa-
per we explicitly estimate parameters θ, k, s
x
, s
y
, t
x
, t
y
and later assemble the affine transformations. Our ap-
proach is more robust since it guarantees that the es-
timated transformation is affine and, hence, is inver-
tible. This cannot be easily guaranteed by estimating
directly the first two rows of matrix T .
4.2 Deformation Field
The deformation field we use to store the displace-
ments of each pixel is similar to that adopted in (Ar-
dizzone et al., 2007; Pekar et al., 2006). When de-
formation fields are adopted, it is possible to compute
the pixel coordinates of the floating image that corre-
spond to the pixel of the registered images as follows:
x
f loat
= x
reg
+ ∆x (8)
y
f loat
= y
reg
+ ∆y. (9)
The displacements ∆x, ∆y are estimated iteratively by
considering the deformations yielded by each local af-
fine transformation.
To avoid checkerboard artifacts, a smoothing
mask is adopted to limit the effects of the affine trans-
formation locally to the selected image block. The
mask is obtained by setting to 1 all pixels within the
image block, and setting to 0 the remaining ones. The
mask is then filtered by a Gaussian smoothing filter
whose effect is that of decreasing the influence of
the affine transformation near the border of the image
block.
4.3 Probability Map
Rather than adopting a uniform grid for processing
images, we sample the center of the image block to
register. Whilst we might sample image block from a
uniform distribution, in order to put more effort in re-
gistering those areas of the images where strong misa-
lignments are observable, we build a probability map
that represents the probability that aligning an image
block centered in a point would improve the registra-
tion accuracy.
This probability map M is computed by estima-
ting the joint entropy of the reference and the floating
images in small blocks (by a sliding window appro-
ach). Joint entropy measures the randomness of the
gray levels in the two selected image blocks (one from
a) b)
Figure 3: a) Probability map M used for sampling image
blocks to register. Higher values in the map indicate a high
value of the joint entropy and, hence, might indicate the
need to align the image blocks. b) The map G: weights used
to update the map are distributed as a Gaussian centered in
the processed image block.
the reference image and the other one from the floa-
ting image). Hence, joint entropy may provide useful
hints to locate areas that “need more deformation”. To
initialize the map M, at each pixel (i, j) we consider a
block W
i, j
centered at (i, j), then we estimate the joint
entropy:
M(i, j) = H( f
|W
i, j
, g
|W
i, j
). (10)
To get a probability distribution, we normalize M in
such a way that all values in M sum to 1:
M(i, j) =
M(i, j)
r
∑
i=1
c
∑
j=1
M(i, j)
(11)
where r and c represent the number of rows and co-
lumns of the registered image respectively.
Estimating the probability map at each iteration is
computationally complex. We estimate the map once
at the beginning of the registration process. Every
time we draw an image block from the map, we per-
form a registration process to estimate a local trans-
formation and update the map in order to move proba-
bility mass from the aligned area. This is achieved by
decreasing the map values by means of a local weight
map G. The map G is obtained by normalizing the
probability values of a Gaussian distribution centered
on the point drawn from the map. The updating of the
map follows the following rule:
M(i, j) = M(i, j) · (1 − α · G(i, j)). (12)
After the map is updated, it is renormalized in order
to get a probability distribution. Fig. 3, shows a pro-
bability map initialized by the joint entropy values in
small image blocks.
5 OPTIMIZATION
In our framework, we used a coordinate descent ap-
proach to optimize the empirical mutual information.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
538

At each iteration, we maximize the objective function
with respect to a single parameter (θ, k, s
x
, s
y
, t
x
, t
y
).
Among the 6 transformations, we accept the one that
yields the highest value of (non empirical) mutual in-
formation.
Maximization of the empirical mutual information
is achieved by using the limited memory Broyden-
FletcherGoldfarbShanno. In contrast to (Viola and
Wells, 1997), which adopts stochastic gradient des-
cent by sampling different sets A and B to estimate
the empirical mutual information, we sample the two
sets and use them to estimate a local optimal solution.
Then, we repeat the transformation estimation while
varying sample sets. In our implementation, small
sample sets (of about 10 samples each one) proved
to be sufficient for gradually maximizing the mutual
information. The small size of the sample sets re-
duces the computational complexity of the objective
function evaluation.
6 EXPERIMENTAL RESULTS
Preliminary evaluation of the proposed method has
been carried out on both synthetic and real data for a
total of 20 pairs of images. All images were 8-bit ima-
ges with 256 ×256 spatial resolution and acquired by
different sources. Following (Ardizzone et al., 2007),
in some experiments we used an atlas from the Simu-
lated Brain Database (SBD), default parameters were
used to generate these volumes. Other images have
been extracted from Alzheimer and multiple sclerosis
diseased volumes available on the whole brain atlas at
http://www.med.harvard.edu/AANLIB/home.html.
When running experiments, we set α to 0.1. The
size of the image block W
i, j
is set to
1
4
of the size of
the floating image. We show a qualitative evaluation
by reporting in Table 1 some of our results. In the
table, the first column shows the floating image, the
second column shows the reference image, the third
column shows the registered image.
7 CONCLUSIONS AND FUTURE
WORK
This paper proposes a new registration algorithm in
which image deformation is iteratively computed by
maximizing the local empirical mutual information.
In contrast to other work at the-state-of-the-art, which
use uniformly sampled image blocks, we use a stra-
tegy inspired to the boosting approach popular in clas-
sification. We update and maintain a probability dis-
tribution over the pixels of the registered image. At
each point, such distribution models the probability
that, by registering image blocks centered on that
point, the similarity between the registered and the
reference images would improve.
This approach increases the flexibility and the po-
wer of the piecewise affine transformation by avoi-
ding that the transformation is constrained to a uni-
formly spaced grid.
Testing of our method has been conducted on
multi-modal images of different patients, and quali-
tatively accurate results have also been obtained on
inter-patient volumes. To deal with occasional failu-
res of the local affine transformation estimation met-
hod, local transformations are accepted and globally
applied only whether global mutual information (not
the empirical one) increases.
Our iterative approach is repeated till conver-
gence, that is until the maximal number of iterations
is reached or only negligible changes in the mutual
information can be measured.
In our approach, the size (or spatial scale) of the
image block is fixed. We have experimented with dif-
ferent values of the spatial scales and found out that
too small size of the image blocks may lead to dege-
nerate solutions. In future work we will investigate
the possibility of introducing within the framework a
method for automatically selecting the scale of the lo-
cal transformation and, hence, the size of the image
blocks. This might be achieved, for example, by con-
sidering an energy function upon the probability map
that we used to sample the image block positions.
ACKNOWLEDGEMENT
This work was partially supported by the grant DM.
46965 LATO CIPE2.
REFERENCES
Ardizzone, E., Gambino, O., La Cascia, M., Lo Presti,
L., and Pirrone, R. (2007). Multi-modal non-rigid
registration of medical images based on mutual in-
formation maximization. In Proc. of International
Conference on Image Analysis and Processing (ICIAP
2007), pages 743–750. IEEE.
Bishop, C. M. (2006). Pattern recognition and machine le-
arning. springer.
Crum, W. R., Hartkens, T., and Hill, D. (2004). Non-rigid
image registration: theory and practice. The British
journal of radiology, 77(suppl 2):S140–S153.
Multi-modal Medical Image Registration by Local Affine Transformations
539
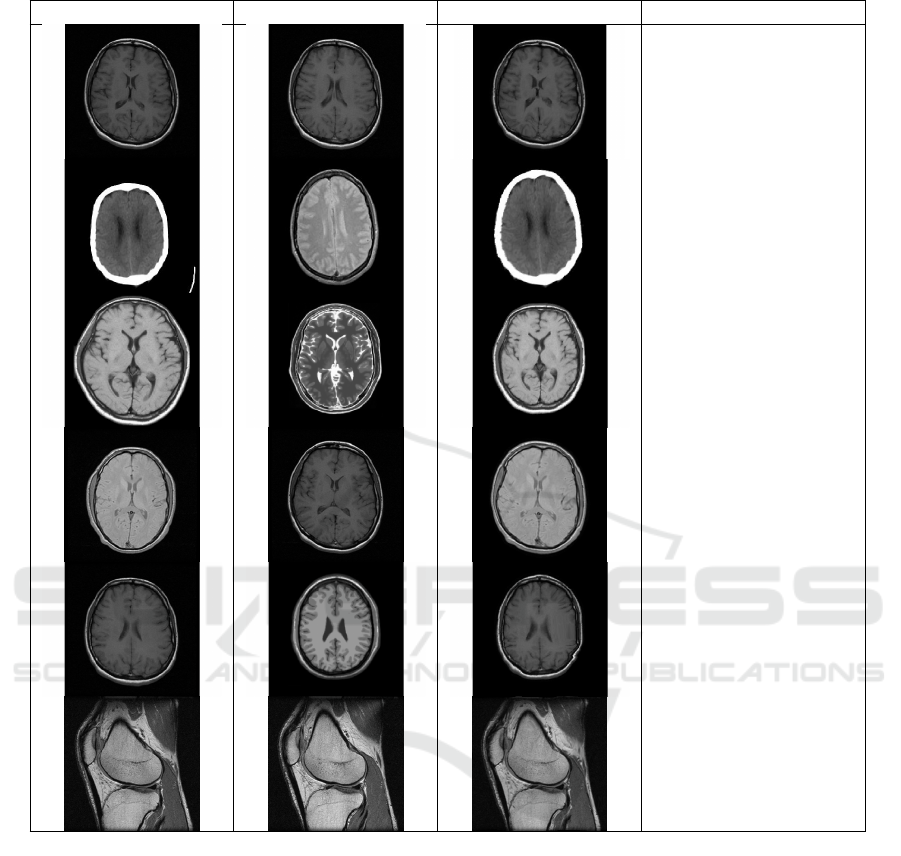
Table 1: Qualitative evaluation of the proposed registration technique.
Floating Image Reference Image Registered Image Notes
Intra-patient MR-T1
images
Inter-patient CT vs MR-
PD images
inter-patient MR-T1 vs
MR-PD images
Inter-patient MR-PD vs
MR-T1 images
MR-T1 vs MR-T1 (atlas)
images
intra-patient MR-T1
images of knee
Fookes, C. B. and Maeder, A. J. (2003). Comparison of
popular non-rigid image registration techniques and a
new hybrid mutual information-based fluid algorithm.
Fornefett, M., Rohr, K., and Stiehl, H. S. (2001). Radial ba-
sis functions with compact support for elastic registra-
tion of medical images. Image and vision computing,
19(1):87–96.
Nelder, J. A. and Mead, R. (1965). A simplex method
for function minimization. The computer journal,
7(4):308–313.
Pekar, V., Gladilin, E., and Rohr, K. (2006). An adaptive ir-
regular grid approach for 3d deformable image regis-
tration. Physics in Medicine and Biology, 51(2):361.
Rueckert, D. and Schnabel, J. A. (2010). Medical image
registration. In Biomedical Image Processing, pages
131–154. Springer.
Viola, P. and Wells, W. (1997). Alignment by maximiza-
tion of mutual information. International journal of
computer vision, 24(2):137–154.
Yang, F., Ding, M., Zhang, X., Hou, W., and Zhong, C.
(2015). Non-rigid multi-modal medical image regis-
tration by combining l-bfgs-b with cat swarm optimi-
zation. Information sciences, 316:440–456.
Zhu, J., Zou, H., Rosset, S., Hastie, T., et al. (2009). Multi-
class adaboost. Statistics and its Interface, 2(3):349–
360.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
540
