
Nourishing Problem Solving Skills by Performing HCI Tasks
Relationships between the Methods of Problem Solving (Retrieval, Discovery, or
Search) and the Kinds of Acquired Problem Solving Skills
Muneo Kitajima
Nagaoka University of Technology, 1603-1 Kamitomioka-machi, Nagaoka, Niigata, Japan
Keywords:
Adaptive Problem Solving, Problem Solving Skill, Well-Defined Problem, Ill-Defined Problem, MHP/RT,
Multi-Dimensional Memory Frame, Routine Expertise, Adaptive Expertise.
Abstract:
There are three methods for deriving a solution for a problem with which a person is facing, which are 1)
retrieval of an existing solution from his/her own memory or from available external resources including
human resources, digital resources, and so on, 2) clarifying the constraints to meet and discovering a solution
that should satisfy them by exploring the problem space, or 3) deriving a solution by applying inference
rules successively until the goal state is achieved. This paper describes the distinctive cognitive processes that
respective methods should use when deriving a solution. On the assumption that the ultimately needed problem
solving skill would be the one which makes a person solve any problem by himself or herself without reliance
on any external resources other than himself/herself, i.e., adaptive problem solving, this paper discusses the
implications of the respective methods of problem solving to acquiring the required problem solving skill.
1 INTRODUCTION
Problems are part of daily life. A problem can be de-
fined as a situation in which people cannot immedi-
ately achieve their goals using routinely performed
procedures. In order for them to solve their prob-
lems, people have to understand what the problem
is, to find adequate resources, to undertake adequate
actions, and to monitor the situation until the goal
is reached, getting around impasses and other unex-
pected obstacles and undertaking corrective actions
when necessary.
Following GPS (General Problem Solver)
by Newell and Simon (1972), problem solving is
defined by a sequence of the following processes:
1. Recognize and represent the current state, or gen-
erate a representation of the current state. When
the current state is the state to start a problem solv-
ing activity, it is called “initial state”,
2. Imagine and represent the states to achieve, or
generate a representation including the top-level
goal and intermediate subgoal states,
3. Select an action to move the current state to the
next, which replaces the current state if the move
is done successfully, and
4. Repeat until the top-level goal state is achieved.
In order for a person to carry out a PS (Problem
Solving) activity by applying these PS processes, the
following conditions have to be satisfied:
1. Be aware of the existence of goals to achieve and
represent them unambiguously and precisely at an
appropriate grain size,
2. Represent the current state as the initial state un-
ambiguously and precisely at an appropriate grain
size,
3. Have a repertoire of operators for transforming
one state to another, and
4. Have a consistent set of criteria for selecting
an appropriate operator among competing ones,
which can be applied to the current state and cause
transitions to different states.
A PS task requires a problem solver to execute
appropriate PCM (Perceptual-Cognitive-Motor) pro-
cesses that are expected to be effective for accom-
plishing the PS task. Figure 1 illustrates how PS
activities happen at the interface between tasks and
PCM processes. They could become diverse depend-
ing on the nature of tasks (including ICT tasks), and
how people carry out PCM processes. External tasks
impose time constraints on people’s PS activities and
people’s PCM processes are carried out under the
132
Kitajima, M.
Nourishing Problem Solving Skills by Performing HCI Tasks - Relationships between the Methods of Problem Solving (Retrieval, Discovery, or Search) and the Kinds of Acquired Problem
Solving Skills.
DOI: 10.5220/0006637101320139
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 2: HUCAPP, pages
132-139
ISBN: 978-989-758-288-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved

Internal (Mental) World
External (Physical, Social) World
Task to be
accomplished
INTERFACE
Perceptual-Cognitive-Motor processes
A variety of PS Tasks
Environmentin
External Definition of PS
Internal Definition of PS
<< Use Memory for PS Activities
||
Store in Memory Outcome of Performance <<
Carried out in Two Minds: Consciously or Unconsciously
<
Adaptive Problem Solving Activities
A sequence of consciously selected actions carried
out with the intension of accomplishing a desired
state, i.e., task goal, starting from the current state
represented in a problem space
Taxonomy of PS Tasks
f
<
Carried
INTERFACE
Ad
A se
ou
sta
es
ried
ed
ate
Continuous cyclic loop of
perception and movement
Figure 1: Adaptive problem solving activities.
limitations (or possible ranges) of PCM capabilities.
Therefore, PS activities are necessarily adaptiveto the
tasks people have to deal with. Adaptation is carried
out within the range of PCM capabilities. As pointed
out by Greiff et al. (2017), APS (Adaptive Problem
Solving) skill is one of critical competencies people
must have in order to achieve well-being in the cur-
rent networked, diverse, and heterogeneous society.
The interactions between the tasks that people
have encountered and the PCM processes that peo-
ple have actually carried out to accomplish the tasks
have significant influence on people’s development of
PS performances (Kitajima, 2016). Therefore, peo-
ple’s experiences do significantly affect the actual ac-
tion sequences for solving problems that are observed
when some tasks are given to them.
In our external environments of the 21st century,
there are an abundant number of artificial objects.
Any objects people interact with should have effect
on the memory that is directly associated with the ob-
jects, and some portions of memory that are indirectly
related with the objects. As people live in diverse
cultures and societies, a same object should be used
differently in terms of use of memory at the time of
using an object, and formation of memory after hav-
ing used an object. PS activities should occur in the
process of object use. After successful PS activities
that deal with any single object, it is differently asso-
ciated with each person’s memory, and socio-cultural
ecology should be a primary factor.
Interactions with novel artificial objects for ac-
complishing some goal inevitably involve APS ac-
tivities because the number of artifacts that surround
a person becomes larger and they should influence
his/her primary task in unpredictable ways to force
him/her to manage the situation by carrying out prob-
lem solving adaptively. The increase of the number
of surrounding artifacts results in the increase of the
number of dimensions to deal with for a person to live
satisfactorily in the 21st century.
The purpose of this paper is to give a characteri-
zation of PS activities in general and APS in partic-
ular from the viewpoint of well-definedness of prob-
lem, to provide a detailed analysis of respective PS
activities by using a cognitive architecture, MHP/RT
(Model Human Processor with Realtime Constraints),
and discusses the nature of PS and APS skills, re-
quired and potentially acquired, as a function of the
degree of well-definedness of the problems, and to
suggest the kinds of HCI tasks that could be accom-
plished by performing the cycles shown in Figure 1
to nourish APS skills, one of critical skills required in
the 21st century.
Nourishing Problem Solving Skills by Performing HCI Tasks - Relationships between the Methods of Problem Solving (Retrieval,
Discovery, or Search) and the Kinds of Acquired Problem Solving Skills
133

2 PROBLEM SOLVING
ACTIVITIES
2.1 Problem-Solving in Well-Defined
Problem Spaces
A problem space is defined by an initial state, a goal
state, a set of intermediate states, and operators to
move from one state to another if a set of conditions
to move is satisfied. A problem space is well-defined
if the initial state, the goal state, and the interme-
diate states are represented unambiguously and pre-
cisely, and the conditions for move are defined ap-
propriately. A person who solves a problem in a well-
defined problemspace (or if he/she is able to represent
the problem as an instance of a well-defined problem
space) would show a deterministic PS behavior for a
given goal, i.e., he/she solves a problem to achieve
the given goal starting from a specific initial state by
successively applying a fixed sequence of operators,
which may be most efficient in terms of, e.g., time,
energy consumption, etc.
2.1.1 GOMS Models
Card et al. (1983) suggests that the knowledge that a
person acquires for carrying out routine goal-oriented
tasks defined by well-defined problem spaces con-
sists of Goal, Operators, Methods, and Selection rules
(GOMS). Goal is represented as a rigid hierarchi-
cal goal structure, in which a goal is satisfied if and
only if all of its subordinate sub-goals are satisfied.
Method is defined by a specific fixed-ordered se-
quence of operators to accomplish a specific goal.
Hierarchically, operators reside at the bottom layer
of the goal structure, and methods are just above the
operator-layer, each of which is considered as a label
to identify a distinct sequence of operators, and asso-
ciated with a goal at that level of hierarchy, in such a
way as “goal G is accomplished by applying method
M.” Selection rule specifies a consistent rule to select
a method among competing methods applicable for
the current state. An operator’s performance such as
execution time is required to be independent of states
in order for an operator to be qualified as operator of
GOMS. With these features, GOMS models are able
to predict performance times of skilled users in carry-
ing out routine goal-oriented tasks (Gray et al., 1993;
Haunold and Kuhn, 1994).
2.1.2 Production System
If a person has a well-defined problem space for a
given goal, his/her operator sequence is predictable.
Models developed under ACT-R cognitive architec-
ture (Anderson, 2007; Anderson and Lebiere, 1998),
Production Systems, can simulate cognitive processes
involved in accomplishing goals by focussing on sin-
gle goals successively and searching for production-
rules defined by a set of pairs of conditions and ac-
tions (equivalent to operators in this context). They
are stored in procedural memory and those that match
the conditions concerning the currently focussed goal
and the existence of required knowledge stored in
declarative memory are possible to fire in the next cy-
cle. A person who becomes an expert level of a do-
main can be viewed as one who has constructed an
efficient set of production rules, called “routine ex-
pertise” (Holyoak, 1991). GOMS model lies at one
extreme of a well-defined problem space, where the
strong condition for operator qualification is applied,
i.e., an operator has to be independent of context,
or an operator’s performance has to be indifferent to
which state it is applied, and due to this feature, it
can predict performance times of a specific kind of
problem solver. For those who can use a well-defined
problem space when he/she needs to accomplish a
goal, it reduces just to cognitive activities to traverse
the problem space. It is very different cognitive activ-
ities than those that require adaptive skills. It may re-
quire, however, times for representing current states,
searching for the next operators that match the condi-
tions to movewith the current state, selecting the most
appropriate one among a set of competing operators,
and actually carrying out the selected operator.
2.2 Problem-Solving in Ill-Defined
Problem Spaces
A well-defined problem space can degrade to ill-
defined problem spaces easily due to several reasons.
One may have the abilities to transform an initially
ill-defined problem space to a less ill-defined one.
Once an ill-defined problem space is transformed
to a well-defined one, one may traverse the well-
defined problem space by successively firing produc-
tion rules as modeled by the ACT-R cognitive archi-
tecture. Holyoak (1991) names this class of exper-
tise as “adaptive expertise”, who is good at generate
appropriate decoupling of the condition-action pairs
of the production rules flexibly in the given situation
to produce appropriate actions. Procedural knowl-
edge represented as production rules are for travers-
ing in a well-defined problem space. Given a top-
level goal, one is required to find in his/her knowl-
edge a well-defined problem space or somehow gen-
erate one. Once it is defined, PS activities can be con-
sidered as the activities for traversing in the problem
HUCAPP 2018 - International Conference on Human Computer Interaction Theory and Applications
134

space. PS skills should involve the skills necessary
for transforming an ill-defined one to well-defined, or
less ill-defined ones, which is APS skill.
2.3 Turning Well-Defined Problem into
Ill-Defined Ones
The following subsections describe how well-defined
problem may turn into ill-defined ones, and point out
necessary cognitive skills for changing ill-defined one
to well-defined one.
Imagining Goals is not Trivial: One may have dif-
ficulty in imagining a set of goals to achieve the top-
level goal. For example, a foreign traveler stands
in front of a ticketing machine with unfamiliar and
strange interface to him/her by which he/she believes
he/she is supposed to buy a train ticket. He/she is
unable to generate intermediate goals to achieve the
top-level goal, i.e., “he/she has a necessary ticket in
his/her hand.” This is the issue of mental models:
• the variety of mental models one has in the do-
main in question (mental model),
• the ability to switch from one mental model to an-
other if the current one is estimated as ineffective
(switching skill), and
• the ability to create effective mental models from
experience (model creation through experience).
Recognizing and Representing State is not Trivial:
In traversing a well-defined problem space, it is ob-
vious where to attend to in the current state one has
reached, and how to represent it because every state
has already been represented unambiguously and pre-
cisely at the required level for selecting next opera-
tors. However, when goals are underspecified, one
may find difficulty in controlling where to attend be-
cause a goal for the current state should provide the
semantic context that helps him/her to parse the cur-
rent state of the scene where he/she is in and compre-
hend it.
Comprehension requires background knowledge
which is different from person to person. In addition,
the ability to filter out the relevant objects from irrele-
vant ones may differ from person to person. Kitajima
and Toyota (2012) demonstrated that elderly partici-
pants who had inappropriate functioning of attention
had difficulty in acquiring relevant information from
rather complicated sign boards while performing a
way-finding task. This evidence shows that even if
one has a well-defined problem space in his/her long-
term memory, it might be difficult for him/her to acti-
vate it for use in the PS activity. No effective retrieval
cue is represented in working memory to activate task
relevant well-defined problem space.
At this stage, an ill-defined problem space might
change to a well-defined or less ill-defined one if one
has the following:
• background knowledge to make him/her possible
to represent objects in the current state appropri-
ately for the given goal (background knowledge
and comprehension skill),
• the ability to use the representation for defining
to-be-searched-for objects (target objects) or eval-
uating the degree of relevance of attended objects
(searching skill), and
• the ability to pay attention to the relevant objects
in the current state (attention skill).
Selecting Next Action is not Trivial: In travers-
ing a well-defined problem space, next actions are
selected by evaluating expected cost to be expended
moving from the current state to the final goal state.
Means-ends analysis or the hill climbing strategy is
applied for this purpose. This is only possible when
the problem space is strictly defined and one is able to
manipulate it as a whole. In reality, it is not possible
if the size of problem space is large. One cannot fore-
see the entire problem space. In addition, one cannot
fully specify the current situation. Under these condi-
tions, one’s action selection should not be rational but
is controlled by the bounded rationality principle and
the satisficing principle uncovered by Simon (1956)
and further studied by Kahneman (2003) in generat-
ing situated next actions.
However, the farther one can foresee in the prob-
lem space, the lesser ill-defined the current problem
space becomes. Kitajima and Toyota (2012) demon-
strated that elderly participants who had inappropri-
ate functioning of planning had difficulty in estimat-
ing relevanceof the acquired “right” information from
sign boards to the current goal while performing a
way-finding task because the current goal is under-
specified. This evidence shows that even if one is
able to attend to a right object, it might be difficult
for him/her to estimate it as relevant for accomplish-
ing the current goal which is not detailed enough to be
matched with the representation of the right object.
An ill-defined problem space might change to a
well- or less ill-defined one if one has the following:
• the ability to foresee the future states by perform-
ing mental simulation (planning ability), and
• background knowledge to be used in the planning
activity (mental model).
Nourishing Problem Solving Skills by Performing HCI Tasks - Relationships between the Methods of Problem Solving (Retrieval,
Discovery, or Search) and the Kinds of Acquired Problem Solving Skills
135
!"#$%&'($)*+,-&'.
!"#$%&'($)*+,-&'.
/(',"00&.1
!"#$%$&$"'()*'#+&
/"(,"2-3$)
4.5'(6$-&'.*/(',"00&.1
!"#$%$&$"'()*'#+&
+/0.,#('.'1/
!$.2
+/0.,#('.'1/*!$.2
!'7&)8*9''(7&.$-&'.
:'.&-'(&.1
!"#$%$&$"'()*'#+&
*!"#$%&"%'()*+,*-
*./&"0+(1$,"2",+(3/'",/#
4.5'(6$-&'.*5('6
;.%&('.6".-
30.,#('.'1/*!$.2
,-#.(/+01(2-&+(3$%'#40-%#'
:"6'(&<$-&'.*'5
!"#$%&'($)*+,-&'.0
$.7*-#"&(*="03)-0
25$(6-%7'
!"#$%$&$"'()*'#+&
9'.0,&'30
4.5'(6$-&'.*/(',"00&.1
!"#$%$&$"'()*'#+&
+3-'.'6'30*+3-'6$-&,
!"#$%&'(*9'.-(')*/(',"00&.1
12%"0%405(-5-/#+(6/#(&5$"7"/'(-%8"'9("'$0:&57;
<=(35-/#+(%$,"2%,5&(4+(#57/'%'$5(#5%$,"/'
>=()57"&:%00+(%$,"25(-5-/#+(
35-/#+(?#/$577"'9(@"-5
2869
:"6'(8*/(',"00&.1*>="0'.$.,"*="$,-&'.?
!"#$%$&$"'()*'#+&
@#'(-AB"(6*:"6'(8
C'(D&.1*:"6'(8
E'.1AB"(6*:"6'(8 :'-'(*:"6'(8
Memory
!"
!"
!"
!"
!"
#$
#$
#$
#$
%$
%$
%$
&$
&$
&$
"'
"'
"'
()
()
()
()
()
*'
*'
*'
*'
#+
#+
#+
#+
&
&
&
System 2
System 1
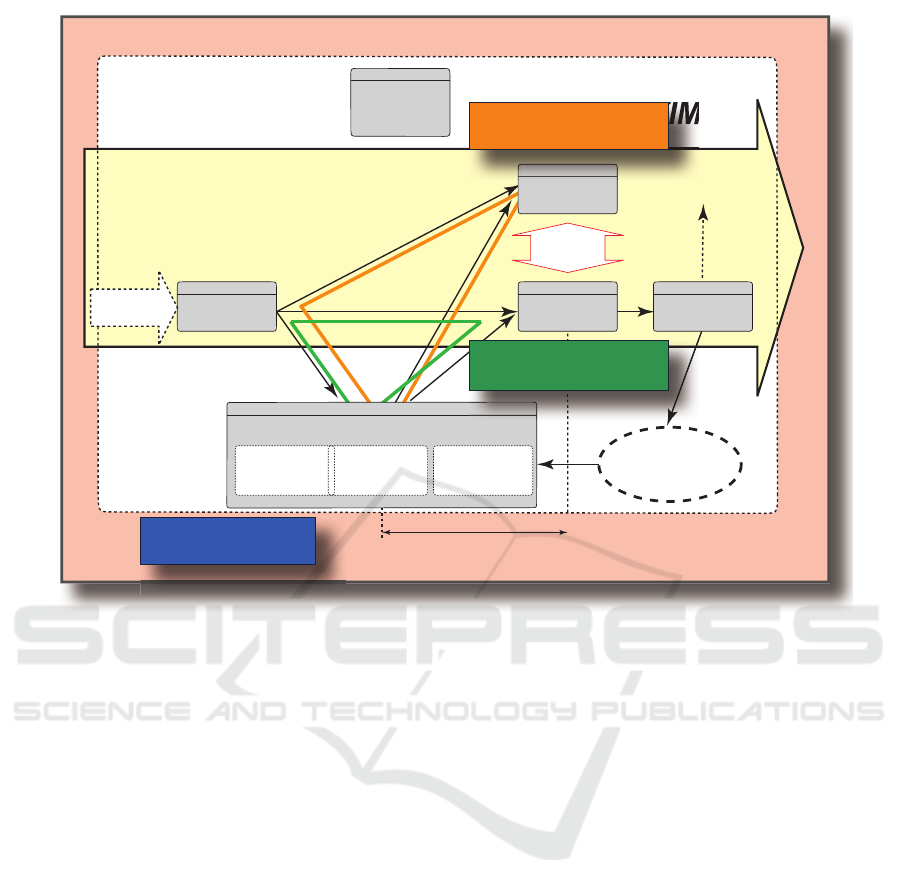
Figure 2: MHP/RT: Model Human Processor with Realtime Constraints.
3 A CLOSER LOOK AT
SELECTING NEXT ACTION
This section introduces a cognitive architecture,
MHP/RT (Model Human Processor with Realtime
Constraints) proposed by Kitajima and Toyota (2013,
2012), that is capable of simulating action selection
processes in any problem solving situations, which
have been described in the previous section phe-
nomenologically. MHP/RT consists of memory and
action selection processes, and describes in detail not
only how action selections are carried out and which
action will be performed but also how the results of
action selections are stored in memory (see Kitajima
(2016) for a full description of the architecture and its
applications).
3.1 Cyclic Processes of Action Selection
and Memorization
Action selection and memorization is a cyclic process
which works while one lives in the world. As one
interacts with the environment, memory is gradually
structured as multi-dimensional memory frames (see
the bottom part of Figure 1 for a schematic illustra-
tion). Constraints on behavioral processing are im-
posed by conscious and unconscious processes, Sys-
tem 2 and System 1 of Two Minds, respectively,
and behavior must be synchronized with the ever-
changing external and internal environments, which
is a form of self-organization. As one grows while
carrying out the cyclic processes of action selection
and memorization, he/she develops his/her memory
and shows distinct behavioral characteristics (Kita-
jima and Toyota, 2014, 2015).
3.2 MHP/RT: Model Human Processor
with Realtime Constraints
Figure 2 illustrates MHP/RT (Kitajima and Toyota,
2012, 2013), which consists of five autonomous sub-
systems. MHP/RT is an extension of a version of dual
processing theories, Two Minds, proposed by Kah-
neman (2003, 2011). Two Minds consists of uncon-
scious processes, System 1, and conscious processes,
System 2. System 1 is a fast feed-forward control pro-
cess driven by the cerebellum and oriented toward im-
mediate action. In contrast, System 2 is a very slow
HUCAPP 2018 - International Conference on Human Computer Interaction Theory and Applications
136

feedback control process driven by the cerebrum and
oriented toward future action.
MHP/RT focuses on synchronization between
System 1 and System 2 in the information flow from
the perceptual system from the environment at the
left end to the motor system at the right end. Out-
put from the perceptual system is diverted into three
paths, one path leads to the conscious process of Sys-
tem 2, the other leads to the unconscious process of
System 1, and the last one leads to the memory sys-
tem. Information in memory activated by the input
from the environmentis become available to System 1
and 2. System 1 and 2 work in synchronous with each
other but the memory process works asynchronously
with System 1 and 2. The dotted oval shows the pro-
cess of memorization of output from the motor pro-
cess. These interactions between System 1 and 2, and
memory are not seriously considered in the original
Karhneman’s Two Minds. Processes associated with
unconscious System 1 are indicated by green lines.
And those associated with conscious System 2 are in-
dicated in orange lines.
3.3 MHP/RT’s Four-Processes: Use and
Modification of Memory
MHP/RT works in one of four different modes when
one looks at it from a particular event that occurred
at the absolute time T. Two are before the event in
which MHP/RT uses memory and the other two are
after the event in which it modifies memory:
• System 2 Before Mode: MHP/RT consciously
uses memory before the event for anticipating
the future event which takes relatively long time
(T − some amount of time).
• System 1 Before Mode: MHP/RT uncon-
sciously uses memory just before the event,
say 100 milli seconds before the event for au-
tomatic preparation for the future event (T −
a few hundreds mill seconds).
• System 1 After Mode: MHP/RT uncon-
sciously tunes the current network connections
related to the past event for better perfor-
mance for the same event in the future (T +
a few hundreds mill seconds).
• System 2 After Mode: MHP/RT consciously
reflects on the past event resulting in structural
changes in memory (T + some amount of time).
4 PROBLEM SOLVING
ACTIVITIES VIEWED FROM
MHP/RT
This section discusses how PS activities are described
from theviewpoint of MHP/RT’s action selection pro-
cesses and memory processes. There are three meth-
ods for deriving a solution for a problem with which a
person is facing; retrieval, inference, and exploration.
In the following subsections, each method is elabo-
rated by combining the description in Section 2 and
Section 3.
4.1 Solving a Problem by Retrieval
Solving a well-defined problem: Given a problem
statement, irrespective of whether it is generated in-
ternally or provided externally, a person represents
both the goal state to achieve and the initial state
that he/she is in unambiguously and precisely enough
to retrieve the description of the action sequences
that should intervene the both ends of the states from
his/her memory. Therefore, this problem is consid-
ered as a well-defined problem.
For solving the problem, he/she is required to just
carry out the retrieved sequence of actions. This prac-
tice should strengthen the retrieved memory trace that
connects the representation of the initial state and the
goal state. System 2 Before Mode is used when re-
trieving the sequences of actions, and System 1 Be-
fore Mode is used to actually solve the problem. Sys-
tem 1 or 2 After Mode strengthen the memory that has
used in the activity. In this way, he/she actually learns
from the PS practice to strengthen the memory traces
of successful performance.
Problem solved without problem solving activities:
Given a problem statement, a person uses external
memory to retrieve solutions. The description of the
problem statement is used literally as it is, and he/she
expects to reach any “solutions” that someone has al-
ready created for the problem. Since the solution is
external, he/she is required to follow consciously the
sequences of actions as the solution specifies. In other
words, the problem is solved by borrowing the others’
thinking processes, and he/she just perceives the state
of the problem and moves eyeballs and hands as the
description of what to do in the perceived situation.
He/she could use System 1 After Mode for tuning
neural networks to just finished activities or deliberate
reflection in System 2 After Mode. Only when he/she
does them, he/she can learn from the practice, other-
wise he/she just memorizes the episode, “the problem
Nourishing Problem Solving Skills by Performing HCI Tasks - Relationships between the Methods of Problem Solving (Retrieval,
Discovery, or Search) and the Kinds of Acquired Problem Solving Skills
137

was given, and successfully solved by retrieving so-
lutions from the Web.” The link between the problem
and the solution may or may not be established. The
problem may not be solved by using his/her memory
when encountered it again in the future. Learning is
very limited compared with the former case.
4.2 Solving a Problem by Inference
Given a problem statement, irrespective of whether
it is generated internally or provided externally, one
represents both the goal state and the initial state that
he/she is in unambiguously and precisely enough to
retrieve the inference rules, i.e., procedural knowl-
edge, to carry out the necessary state transitions. This
is the way of problem solving modeled as production
systems like ACT-R (Anderson, 2007; Anderson and
Lebiere, 1998) or Soar (Newell, 1990; Laird et al.,
1987).
In this case, it is assumed that a person has pro-
cedural memory, which connects perceptual multi-
dimensional memory frame with behavior multi-
dimensional memory frame with the help of relation
multi-dimensional memory frame, which are associ-
ated with perceptual, System 1, and System 2 pro-
cesses, respectively. The inference rules are succes-
sively applied to transform the current state to the
next until the goal state is achieved. System 2 Be-
fore Mode is used for planning and System 1 Before
Mode is used to execute individual production rules.
System 1 After Mode is used to strengthen the suc-
cessfully applied production rules in behavior multi-
dimensional memory frame and declarative memory
in relation multi-dimensional memory frame. Sys-
tem 2 After Mode might be used to create a new
set of production rules that are expected to function
more efficiently for the kinds of situations defined by
the just solved problem. Ultimately, the person will
have the ability to carry out the same task more and
more efficiently, very fast without error; it is said that
he/she has acquired routine expertise for the kinds of
tasks executable by applying well-learned procedural
knowledge (Holyoak, 1991).
The states that appear while solving the problem
are represented unambiguously and precisely enough
to retrieve production rules from procedural mem-
ory (behavior multi-dimensional memory frame), and
factual knowledge from declarative memory (relation
multi-dimensional memory frame), triggered by per-
ceptual multi-dimensional memory frame that is ac-
tivated by external perceptual stimuli. Therefore, the
performance of PS activity would depend on the con-
tents of memory and the functioning of perceptual
sensors. These should be influenced by the kinds of
experiences one has had from his/her birth. This is ob-
viously affected by the culture and the circumstances
one is in in everyday life while one grows up. This
suggests the external environment should be of cru-
cial importance for nourishing this kind of PS skill.
4.3 Solving a Problem by Exploration
Given a problem statement, a person can only repre-
sent both the goal state and the initial state vaguely,
and therefore it is not possible for him/her to retrieve
anything directly relevant to solve the problem. This
is the case where he/she is faced with an ill-defined
problem as described in Section 2. He/she needs to
create effective retrieval cues to find any action that
should move the current state to another along the un-
known successful path to the goal, whose representa-
tion should become less vague as one proceeds. This
is equivalent to make the initial vague representation
of the goal clearer; to convert the ill-defined problem
to a less ill-defined or hopefully a well-defined one.
The notion of resonance is relevant for this to
happen. Memory system in MHP/RT is regarded
as an autonomous system, which means that mem-
ory should not be a passive database system to re-
turn data on request from the action selection process.
The MHP/RT’s memory system receives input from
the autonomous perceptual system and resonates with
the other autonomous systems, i.e., conscious system
(System 2 of Two Minds) and unconscious system
(System 1 of Two Minds) to make available the cur-
rently activated portion of memory. The mechanism
of resonance is used to make available any relevant
portion of behavior multi-dimensional memory frame
to the action selection process of MHP/RT. System 2
Before Mode and System 1 Before Mode use this res-
onance mechanism to select plan and next action.
The selected action may succeed or fail, or result
in uncertain outcome to fall into an impasse.The pro-
cesses are totally exploratory but the memory traces
of the executed actions will be created with the flag
of success/failure. The memory trace with success-
ful performance will be strengthened because it is as-
sociated with rewards. Ultimately, the person will
have the ability to handle the same situation flexi-
bly with less ineffective search; it is said that he/she
has acquired adaptive expertise (Holyoak, 1991) for
the kinds of ill-defined tasks with a variety of well-
developed behavior and motion multi-dimensional
memory frames available through resonance with per-
ceptual multi-dimensional memory frame.
Development of flexible and rich memory is nec-
essary for acquiring adaptive expertise through a va-
riety of experience with reality (not virtual). It is of-
HUCAPP 2018 - International Conference on Human Computer Interaction Theory and Applications
138

ten felt that a solutions for an ill-defined problem is
discovered suddenly or the solution emerges sponta-
neously. It is because the critical process underlying
the discovery is memory resonance. However, the
richness of memory should affect the possibility of
successful discovery should happen; construction of
memory structure that integrates perception and body
movement with high reality is important, and again
a variety of experience with reality is important for
nourishing this problem solving skill.
5 CONCLUSIONS
This paper suggested that when faced with a problem,
either it is given externally or generated internally,
it could be carried out either by retrieval, search, or
discovery method, each of which is associated with
distinct cognitive processes for action selection and
memorization. Respective methods should have dif-
ferent implications to development of PS skills. Re-
trieval method would be effective when his/her own
memory is used; search method is effective for ad-
vancing efficient use of inference rules; discovery
method is crucial for turning ill-defined problem to
well-defined one which should be critical for APS
skill development.
The importance of experience was emphasized for
nourishing PS skills. Some aspects of experience
needs to be carefully designed in education, society,
or wherever a person carries out some activity for the
purpose of nourishing PS skills by considering the
distinct features in terms of cognitive processes in-
volved in the different kinds of PS activities.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Number 15H02784.
REFERENCES
Anderson, J. R. (2007). How can the Human Mind Occur
in the Physical Universe? Oxford University Press,
New York, NY.
Anderson, J. R. and Lebiere, C. (1998). The Atomic Com-
ponents of Thought. Lawrence Erlbaum Associates,
Mahwah, NJ.
Card, S. K., Moran, T. P., and Newell, A. (1983). The Psy-
chology of Human-Computer Interaction. Lawrence
Erlbaum Associates, Hillsdale, NJ.
Gray, W. D., John, B. E., and Atwood, M. E. (1993). Project
Ernestine: Validating a GOMS Analysis for Predict-
ing and Explaining Real-World Task Performance.
Human-Computer Interaction, 8(3):237–309.
Greiff, S., Scheiter, K., Scherer, R., Borgonovi, F., Britt, A.,
Graesser, A., Kitajima, M., and Rouet, J.-F. (2017).
Adaptive Problem Solving, MOVING TOWARDS A
NEW ASSESSMENT DOMAIN IN THE SECOND
CYCLE OF PIAAC. OECD Education Working Pa-
pers, (156).
Haunold, P. and Kuhn, W. (1994). A Keystroke Level Anal-
ysis of a Graphics Application: Manual Map Digi-
tizing. In Proceedings of ACM CHI’94 Conference
on Human Factors in Computing Systems, pages 337–
343, New York, NY. ACM.
Holyoak, K. J. (1991). Toward a General Theory of Exper-
tise: Prospects and Limits, chapter Symbolic connec-
tionism: toward third-generation theories of expertise.
Cambridge University Press.
Kahneman, D. (2003). A perspective on judgment and
choice. American Psychologist, 58(9):697–720.
Kahneman, D. (2011). Thinking, Fast and Slow. Farrar,
Straus and Giroux, New York, NY.
Kitajima, M. (2016). Memory and Action Selection in
Human-Machine Interaction. Wiley-ISTE.
Kitajima, M. and Toyota, M. (2012). Simulating nav-
igation behaviour based on the architecture model
Model Human Processor with Real-Time Constraints
(MHP/RT). Behaviour & Information Technology,
31(1):41–58.
Kitajima, M. and Toyota, M. (2013). Decision-making and
action selection in Two Minds: An analysis based on
Model Human Processor with Realtime Constraints
(MHP/RT). Biologically Inspired Cognitive Architec-
tures, 5:82–93.
Kitajima, M. and Toyota, M. (2014). Hierarchical Structure
of Human Action Selections – An Update of Newell’s
Time Scale of Human Action. In Procedia Computer
Science, BICA 2014. 5th Annual International Confer-
ence on Biologically Inspired Cognitive Architectures,
volume 41, pages 321–325.
Kitajima, M. and Toyota, M. (2015). Multi-dimensional
memory frames and action generation in the MHP/RT
cognitive architecture. In Procedia Computer Sci-
ence, BICA 2015. 6th Annual International Confer-
ence on Biologically Inspired Cognitive Architectures,
volume 71, pages 202–207.
Laird, J. E., Newell, A., and Rosenbloom, P. S. (1987).
Soar: An architecture for general intelligence. Arti-
ficial Intelligence, 33:1–64.
Newell, A. (1990). Unified Theories of Cognition (The
William James Lectures, 1987). Harvard University
Press, Cambridge, MA.
Newell, A. and Simon, H. A. (1972). Human Problem Solv-
ing. Prentice-Hall, Englewood Cliffs, NJ.
Simon, H. A. (1956). Rational choice and the structure of
the environment. Psychological Review, 63:129–138.
Nourishing Problem Solving Skills by Performing HCI Tasks - Relationships between the Methods of Problem Solving (Retrieval,
Discovery, or Search) and the Kinds of Acquired Problem Solving Skills
139
