
Combined Correlation Rules to Detect Skin based on Dynamic Color
Clustering
Rodrigo Augusto Dias Faria and Roberto Hirata Jr.
Institute of Mathematics and Statistics, University of S
˜
ao Paulo, Rua do Mat
˜
ao 1010, S
˜
ao Paulo, Brazil
Keywords:
Skin Detection, Human Skin Segmentation, YCbCr Color Model, Correlation Rules, Dynamic Color
Clustering.
Abstract:
Skin detection plays an important role in a wide range of image processing and computer vision applications.
In short, there are three major approaches for skin detection: rule-based, machine learning and hybrid. They
differ in terms of accuracy and computational efficiency. Generally, machine learning and hybrid approaches
outperform the rule-based methods, but require a large and representative training dataset as well as costly
classification time, which can be a deal breaker for real time applications. In this paper, we propose an
improvement of a novel method on rule-based skin detection that works in the YCbCr color space. Our
motivation is based on the hypothesis that: (1) the original rule can be reversed and, (2) human skin pixels
do not appear isolated, i.e. neighborhood operations are taken in consideration. The method is a combination
of some correlation rules based on these hypothesis. Such rules evaluate the combinations of chrominance
Cb, Cr values to identify the skin pixels depending on the shape and size of dynamically generated skin color
clusters. The method is very efficient in terms of computational effort as well as robust in very complex image
scenes.
1 INTRODUCTION
Skin detection can be defined as the process of identi-
fying skin-colored pixels in an image. It plays an im-
portant role in a wide range of image processing and
computer vision applications such as face detection,
pornographic image filtering, gesture analysis, face
tracking, video surveillance systems, medical image
analysis, and other human-related image processing
applications.
The problem is complex because of the numerous
similar materials with human skin tone and texture,
and also because of illumination conditions, ethnicity,
sensor capturing singularities, geometric variations,
etc. Because it is a primary task in image process-
ing, additional requirements as real time processing,
robustness and accuracy are also desirable.
The human skin color pixels have a restricted
range of hues and are not deeply saturated, since the
appearance of skin is formed by a combination of
blood (red) and melanin (brown, yellow), which leads
the human skin color to be clustered within a small
area in the color space (Fleck et al., 1996).
The choice of a color space is also a key point
of a feature-based method when using skin color as
a detection cue. Due to its sensitivity to illumina-
tion, the input image is, in general, first transformed
into a color space whose luminance and chrominance
components can be separate to mitigate the prob-
lem (Vezhnevets et al., 2003).
Basically, there are three approaches for skin de-
tection: rule-based, machine learning based and hy-
brid. They differ in terms of classification accuracy
and computational efficiency. Machine learning and
hybrid methods require a training set, from which the
decision rules are learned. Such approaches outper-
form the rule-based methods but require a large and
representative training dataset as well as it takes a
long classification time, which can be a deal breaker
for real time applications (Kakumanu et al., 2007).
In this work we propose an improvement of a
novel method on rule-based skin detection that works
in the YCbCr color space (Brancati et al., 2017). Our
motivation is based on the hypothesis that the origi-
nal rule can be complemented with another rule that
is a reversal interpretation of the one proposed origi-
nally. Besides that, we also take in consideration that
a skin pixel does not appear isolated, so we propose
another variation based on neighborhood operations.
The set of rules evaluate the combinations of chromi-
Faria, R. and Jr., R.
Combined Correlation Rules to Detect Skin based on Dynamic Color Clustering.
DOI: 10.5220/0006618003090316
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
309-316
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
309

nance Cb, Cr values to identify the skin pixels de-
pending on the shape and size of dynamically gener-
ated skin color clusters (Brancati et al., 2017). The
method is very efficient in terms of computational ef-
fort as well as robust in very complex image scenes.
2 RELATED WORK
There are a large number of works of skin detection
based on color information and there are a couple of
them comparing different techniques and classifiers,
mainly from the point of view of performance, color
models, skin color modeling and different datasets
(Vezhnevets et al., 2003; Kakumanu et al., 2007;
Mahmoodi and Sayedi, 2016).
In (Jones and Rehg, 2002), the authors applied
a Bayesian decision rule with a 3-dimensional his-
togram model constructed from approximately 2 bil-
lion pixels collected from 18,696 images over the In-
ternet to perform skin detection. They calculated two
different histograms for skin and non-skin in the RGB
color space. Using those histograms along with train-
ing data, a classifier was derived with the standard
likelihood ratio approach of a pixel be skin to not be
skin. The best performance at an error rate of 88%
was reached for histograms of size 32.
Another method explicitly defines, through a
number of rules, the boundaries that delimit the
grouping of skin pixels in some color space (Vezh-
nevets et al., 2003). This was the approach adopted
by (Kovac et al., 2003) in the YCbCr color space,
obtaining a true positive rate of 90.66%. They (Ko-
vac et al., 2003) also performed experiments with
the chromaticity channels Cb and Cr only. The re-
sults showed that the performance of the classifier is
inferior in relation to the approach using all Y, Cb
and Cr channels. The key advantage of this method
is the simplicity of skin detection rules that leads
to the construction of a very fast classifier. On the
other hand, achieving high recognition rates with this
method is difficult because it is necessary to find a
good color space and empirically appropriate decision
rules (Vezhnevets et al., 2003).
Differently from (Kovac et al., 2003), the authors
of (Yogarajah et al., 2011) developed a technique
where the thresholds defined in the rules are dynam-
ically adapted. The method consists of detecting the
region of the eye and extracting an elliptical region to
delimit the corresponding face. A Sobel filter is ap-
plied to detect the edges of the resulting region which
is subjected to a dilation. The resulting image is sub-
tracted from the elliptical image. As a result, there is
a more uniform skin region where the thresholds are
calculated. The technique was used as a preprocess-
ing step for (Tan et al., 2012) in a strategy combin-
ing a 2-dimensional density histogram and a Gaussian
model for skin color detection. The results showed an
accuracy of 90.39%.
(Naji et al., 2012) constructed an explicit classi-
fier in the HSV color space for 4 different skin eth-
nic groups in parallel. After primitive segmentation,
a rule-based region growth algorithm is applied, in
which the output of the first layer is used as a seed,
and then the final mask in other layers is constructed
iteratively by neighboring skin pixels. The number of
true positive pixels reported was of 96.5%.
(Kawulok et al., 2013) combined global and local
image information to construct a probability map that
is used to generate the initial seed for spatial analysis
of skin pixels. Seeds extracted using a local model are
highly adapted to the image, which greatly improves
the spatial analysis result.
Although color is not used directly in some skin
detection approaches, it is one of the most decisive
tools that affect the performance of algorithms (Mah-
moodi and Sayedi, 2016). Despite the performance
of most skin detectors is directly related to the choice
of color space, (Albiol et al., 2001) proved that the
optimum performance of the skin classifiers is inde-
pendent of the color space.
RGB is the most commonly used color space
for storing and representing digital images, since the
cameras are enabled to provide the images in such
model. To reduce the influence of illumination, the
RGB channels can be normalized and the third com-
ponent can be removed, since it does not provide sig-
nificant information (Kakumanu et al., 2007). This
characteristic led (Bergasa et al., 2000) to construct
an adaptive and unsupervised Gaussian model to seg-
ment skin into the normalized RGB color space, using
only the channels r and g.
In (Jayaram et al., 2004), a comparative study us-
ing a Gaussian approach and a histogram in a dataset
of 805 color images in 9 different color spaces has
been performed. The results revealed that the absence
of the luminance component, which means using only
two channels of the color space, significantly impacts
the performance as well as the selection of the color
space. The best results were obtained in the SCT, HSI
and CIELab color spaces with histogram approach.
In (Chaves-Gonz
´
alez et al., 2010), the authors
compared the performance of 10 color spaces based
on the k-means clustering algorithm on 15 images
of the Aleix and Robert (AR) face image database
(Mart
´
ınez and Benavente, 1998). According to the re-
sults obtained, the most appropriate color spaces for
skin color detection are YCgCr, YDbDr and HSV.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
310

In (Kaur and Kranthi, 2012), an algorithm simi-
lar to that proposed by (Kovac et al., 2003) have been
implemented, where the boundaries that delimit the
grouping of skin pixels are defined by explicit rules.
After segmenting the image with the explicit rules,
the algorithm also performs morphological and filter-
ing operations to improve the accuracy of the method.
The authors applied the algorithm in the YCbCr and
CIELab color spaces, ignoring the Y and L luminance
components, respectively. The results were more sat-
isfactory when the algorithm was applied on CIELab.
A similar technique was implemented in (Shaik et al.,
2015) and (Kumar and Malhotra, 2015) in the HSV
and YCbCr color spaces, the latter providing the best
results in both.
Finally, in (Brancati et al., 2017), a novel rule-
based skin detection method that works in the YCbCr
color space based on correlation rules that evaluate
the combinations of chrominance Cb, Cr values to
identify the skin pixels depending on the shape and
size of dynamically generated skin color clusters was
proposed. Geometrically, the clusters create trape-
zoids in the YCb and YCr subspaces that reflect in the
inversely proportional behavior of the chrominance
components. The method was compared with six well
known rule-based methods in literature outperform-
ing them in terms of quantitative performance evalu-
ation parameters. Moreover, the qualitative analysis
shows that the method is very robust in critical sce-
narios.
3 SKIN DETECTION
A state of the art skin detection method has been re-
cently developed by (Brancati et al., 2017). Here, we
review the method and extend it adding more rules to
enforce the constraints and seeking for a better perfor-
mance in terms of false positive rate without hurting
the performance of the original method.
3.1 Original Method
In order to describe the proposed extensions, we will
first transcribe the original method that is based on the
definition of image-specific trapezoids, named T
YCb
and T
YCr
, in the YCb and YCr subspaces, respectively.
The trapezoids are essential to verify a relation be-
tween the chrominance components Cb and Cr in
these subspaces (Brancati et al., 2017).
The base of the trapezoids T
YCr
and T
YCb
(Fig. 1)
are given by (Y
min
, Cr
min
) and (Y
min
, Cb
max
) in the YCr
and YCb subspaces, respectively. The values Cr
min
=
133, Cb
max
= 128 were selected according to (Chai
Figure 1: Graphical representation of the trapezoids as well
as the parameters Y
min
= 0, Y
max
= 255, Y
0
, Y
1
, Y
2
, Y
3
, Cr
min
,
Cr
max
, Cb
min
, Cb
max
, h
Cr
, h
Cb
, H
Cr
(P
Y
), H
Cb
(P
Y
). Adapted
from (Brancati et al., 2017).
and Ngan, 1999) where a skin color map was designed
using a histogram approach based on a given set of
training images. Chai and Ngan observed that the Cr
and Cb distributions of skin color falls in the ranges
[133, 173] and [77, 127], respectively, regardless the
skin color variation in different races.
The Cr
max
parameter is calculated dynamically,
taking into account the histogram of the pixels with
Cr values in the range [Cr
min
, 183], looking for the
maximum value of Cr associated with at least 0.1%
1
of pixels in the image. The same applies to Cb
min
,
taking the histogram with Cb values in the range
[77, Cb
max
]. Y
0
and Y
1
(shorter base of the upper trape-
zoid) are, respectively, the 5th and 95th percentile of
the luminance values associated with the pixels of the
image with Cr = Cr
max
. A similar procedure is used
to find the values of the shorter base of the other trape-
zoid, Y
2
and Y
3
(see Fig. 2 for an example).
The correlation rules between the chrominance
components P
Cr
and P
Cb
of a pixel P are defined as:
• the minimum difference between the values P
Cr
and P
Cb
, denoted I
P
;
• an estimated value of P
Cb
, namely P
Cb
s
;
• the maximum distance between the points
(P
Y
, P
Cb
) and (P
Y
, P
Cb
s
), denoted J
P
.
Therefore, to determine if P is skin, the following
equations must hold:
P
Cr
− P
Cb
≥ I
P
(1)
|P
Cb
− P
Cb
s
| ≤ J
P
(2)
1
In (Brancati et al., 2017) this rate is reported to be equal
to 10%. However, in the distributed source code we found
the value 0.1%, that we are using in the experiments.
Combined Correlation Rules to Detect Skin based on Dynamic Color Clustering
311
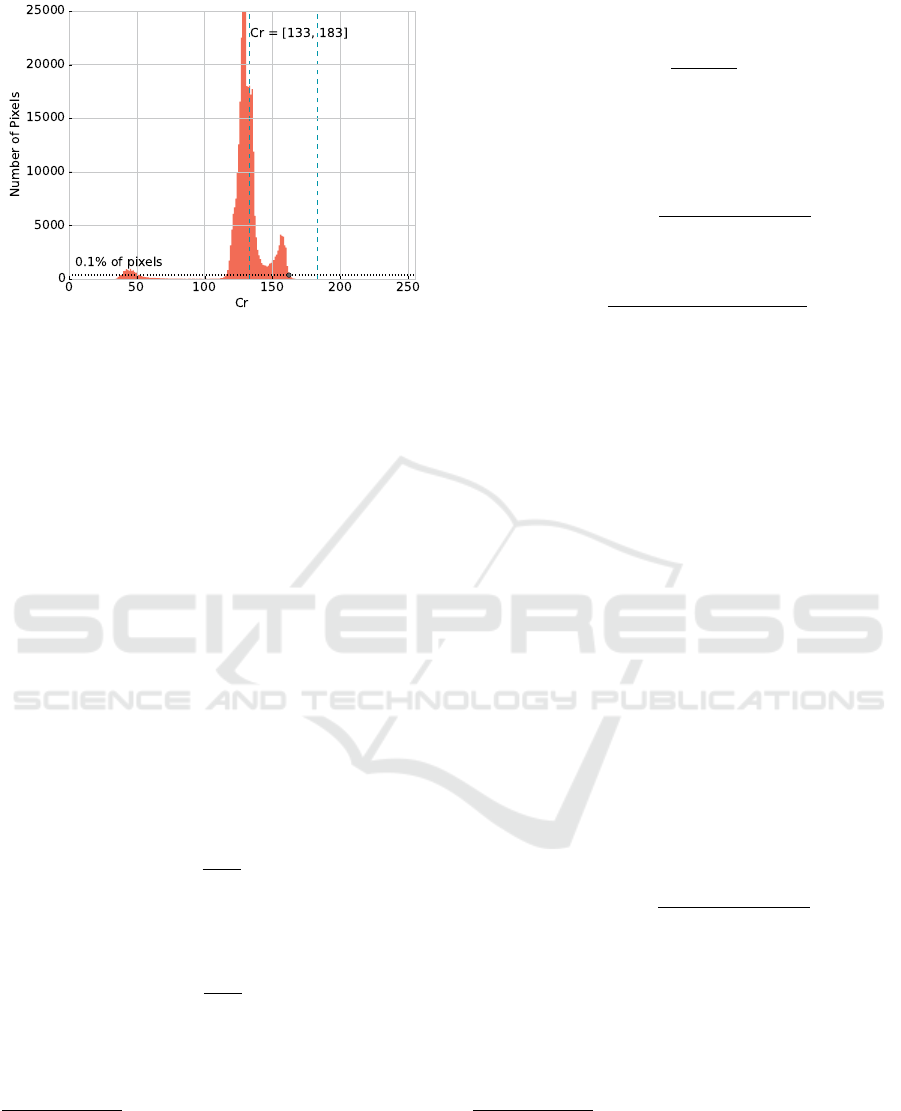
Figure 2: Computation of Cr
max
= 162 based on Cr values
histogram of a 724 x 526 image.
The estimated value P
Cb
s
is given by
2
:
P
Cb
s
= Cb
max
− dP
Cb
s
(3)
where
3
:
dP
Cb
s
= α · dP
Cr
(4)
dP
Cr
= P
Cr
−Cr
min
(5)
The coordinates of the points [P
Y
, H
Cr
(P
Y
)] and
[P
Y
, H
Cb
(P
Y
)] in one of the legs of the trapezoid
are useful for the calculation of α. We first com-
pute the distances ∆
Cr
(P
Y
) and ∆
Cb
(P
Y
) between the
points (P
Y
, H
Cr
(P
Y
)), (P
Y
, H
Cb
(P
Y
)) and the base of
the trapezoids:
∆
Cr
(P
Y
) = H
Cr
(P
Y
) −Cr
min
(6)
∆
Cb
(P
Y
) = Cb
max
− H
Cb
(P
Y
) (7)
Next, the distances are normalized with respect to
the difference in size of the trapezoids:
∆
0
Cr
(P
Y
) =
(
∆
Cr
(P
Y
) ·
A
T
YCb
A
T
YCr
if A
T
YCr
≥ A
T
YCb
∆
Cr
(P
Y
) otherwise
(8)
∆
0
Cb
(P
Y
) =
(
∆
Cb
(P
Y
) if A
T
YCr
≥ A
T
YCb
∆
Cb
(P
Y
) ·
A
T
YCr
A
T
YCb
otherwise
(9)
where A
T
YCr
and A
T
YCb
are the areas of trapezoid T
YCr
and T
YCb
, respectively.
2
dP
Cb
s
is the distance between the points (P
Y
, P
Cb
s
) and
(P
Y
, Cb
max
) in the YCb subspace, calculated on the basis of
dP
Cr
, observing the inversely proportional behavior of the
components. α is the rate between the normalized heights
of the trapezoids in relation to the P
Y
value.
3
dP
Cr
is the distance between (P
Y
, P
Cr
) and (P
Y
, Cr
min
)
points in the YCr subspace.
Then, the value of α is given by:
α =
∆
0
Cb
(P
Y
)
∆
0
Cr
(P
Y
)
(10)
Finally, I
P
and J
P
are given by:
I
P
= s f · [(∆
0
Cr
(P
Y
) − dP
Cr
) + (∆
0
Cb
(P
Y
) − dP
Cb
s
)]
(11)
J
P
= dP
Cb
s
·
dP
Cb
s
+ dP
Cr
∆
0
Cb
(P
Y
) + ∆
0
Cr
(P
Y
)
(12)
where:
s f =
min((Y
1
−Y
0
), (Y
3
−Y
2
))
max((Y
1
−Y
0
), (Y
3
−Y
2
))
(13)
3.2 Extended Method
The hypothesis defined in the original method is
based on rules that an estimated value of the point
P
Cb
, namely P
Cb
s
, must hold in order for the correla-
tion to be valid. On the basis of the inversely propor-
tional behavior of the chrominance components, we
will rewrite the correlation rules with respect to the
P
Cr
point.
Thus, we have to refactor the correlation rules to
put them in terms of the estimated value of P
Cr
, that
we denote as P
Cr
s
4
:
P
Cr
s
= dP
Cr
s
+Cr
min
(14)
where
5
:
dP
Cr
s
= α · dP
Cb
(15)
dP
Cb
= Cb
max
− P
Cb
(16)
Next, the constraints given by I
P
and J
P
in the Eq.
11 and 12 respectively, can be redefined as:
I
0
P
= s f · [(∆
0
Cr
(P
Y
) − dP
Cr
s
) + (∆
0
Cb
(P
Y
) − dP
Cb
)]
(17)
J
0
P
= dP
Cr
s
·
dP
Cb
+ dP
Cr
s
∆
0
Cb
(P
Y
) + ∆
0
Cr
(P
Y
)
(18)
Therefore, to determine if the pixel P is skin, we
have to modify the conditions given by Eq. 1 and 2:
P
Cr
− P
Cb
≥ I
0
P
(19)
|P
Cr
− P
Cr
s
| ≤ J
0
P
(20)
4
dP
Cr
s
is the distance between the points (P
Y
, P
Cr
s
) and
(P
Y
, Cr
min
) in the YCr subspace, calculated on the basis of
dP
Cb
, observing the inversely proportional behavior of the
components. α is the rate between the normalized heights
of the trapezoids in relation to the P
Y
value.
5
dP
Cb
is the distance between (P
Y
, P
Cb
) and (P
Y
, Cb
max
)
points in the YCb subspace.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
312
Doing this simple extension, we are now able to
apply the method to the same sets of images to eval-
uate, in fact, the inversely proportional behavior of
the chrominance components. More than that, we can
combine all these constraints, given by the pair equa-
tions 1 and 2, 19 and 20, to reinforce the firstly defined
hypothesis.
3.3 Neighborhood Extended Method
Both methods presented in Sec. 3.1 and 3.2 can be
applied to detect skin pixels, either separated or in a
conjunction rule. However, skin pixels do not usually
appear isolated and we can improve the method using
neighbor pixels information, when evaluating a pixel
P, in order to decide if P represents human skin, or
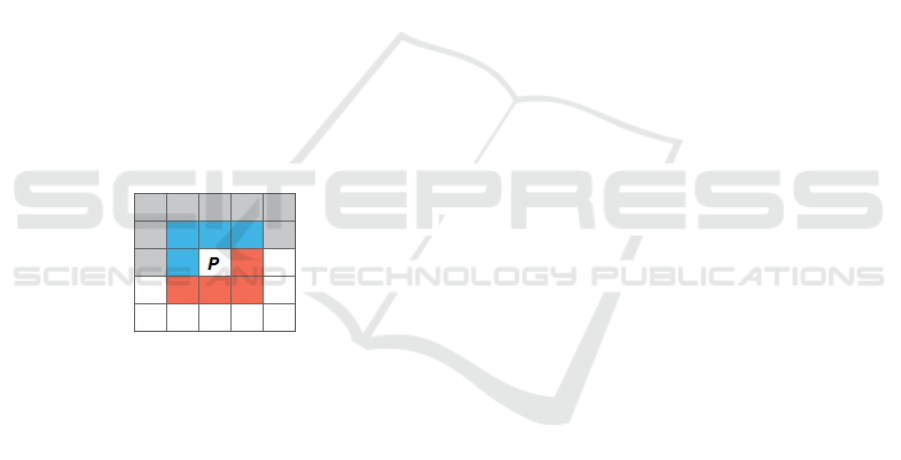
not. Let N
−
8
(P) the 8-connected neighbors of P that
can be reached before P when scanning the image in
raster order (blue points in Fig. 3).
Thus, we classify P as skin in the following man-
ner: if the constraints given by the pair of equations
1 and 2, as well as 19 and 20 hold, then P is classi-
fied as skin. When only one of conditions is satisfied,
then we check the decision in N
−
8
(P). If three or more
pixels are skin, then P will also be classified as a skin
pixel.
Figure 3: Neighbors evaluation with respect to P. If the im-
age is scanned in raster order, N
−
8
(P) is the set of points that
can be reached before P in a 8-connected neighborhood.
4 EXPERIMENTS
In this section we present some experimental evalua-
tions of the proposed extensions along with the orig-
inal method in three widely known datasets: SFA,
Pratheepan and HGR.
4.1 Datasets
The SFA is a set of images of frontal faces obtained
from two other color image databases: the FERET,
created by (Phillips et al., 1996), and the AR proposed
by (Mart
´
ınez and Benavente, 1998), which provided
876 and 242 images each, respectively. It is important
to notice that AR images have a white background
and small variations of skin color. In other words,
the environment is more controlled than the images in
FERET (Casati et al., 2013).
The images in the Pratheepan dataset were down-
loaded randomly from Google for human skin detec-
tion search. There are 78 images of family and face
captured with a range of distinct cameras using dif-
ferent color enhancement and under different illumi-
nation conditions (Tan et al., 2012).
The last dataset is the HGR for hand gesture
recognition which contains the gestures from Polish
and American Sign Language. There are 1,558 im-
ages acquired in different conditions of background,
dimensions and lightening (Kawulok et al., 2014).
4.2 Evaluation Measures
Precision, Recall, Specificity and F-measure have
been used as evaluation metrics. They are the same
used in (Brancati et al., 2017) to compare the perfor-
mance with state-of-the-art methods.
4.3 Results and Discussion
The original method was compared with six well
known rule-based methods in literature using four dif-
ferent datasets, two of them, HGR and Pratheepan,
have also been used here.
Because the method had the best F-measure in the
HGR and Pratheepan datasets in comparison with the
other six methods and, in addition, because it per-
formed the top first Precision in HGR and second in
Pratheepan, we decided to compare the proposed ex-
tensions only to the original method.
Table 1 shows quantitative result metrics of the
experiments. Column 1 refers to the dataset used.
Column 2 refers to the method being experimented:
Original for the original hypothesis; Reversed refers
to the reverse hypothesis with respect to P
Cr
s
param-
eter; Combined refers to the combination of both of
the former methods (see Sec. 3.2); Neighbors refers
to the extension of the method using the neighborhood
approach.
As one can see, the reverse hypothesis performed
better than the original method and achieved the best
Recall in HGR and SFA. It also achieved the best F-
measure in SFA with a 0.8125 rate, which gave almost
0.25 in gain compared to the original.
In general, the reverse method increased the Re-
call but did not perform well in Precision and Speci-
ficity measures. When we combined both methods,
the best Precision and Specificity were achieved for
all datasets but it loses some performance in Recall.
However, it has very high F-measure rates.
The combined method along with the neighbor-
hood approach achieved the best F-measure in HGR
Combined Correlation Rules to Detect Skin based on Dynamic Color Clustering
313
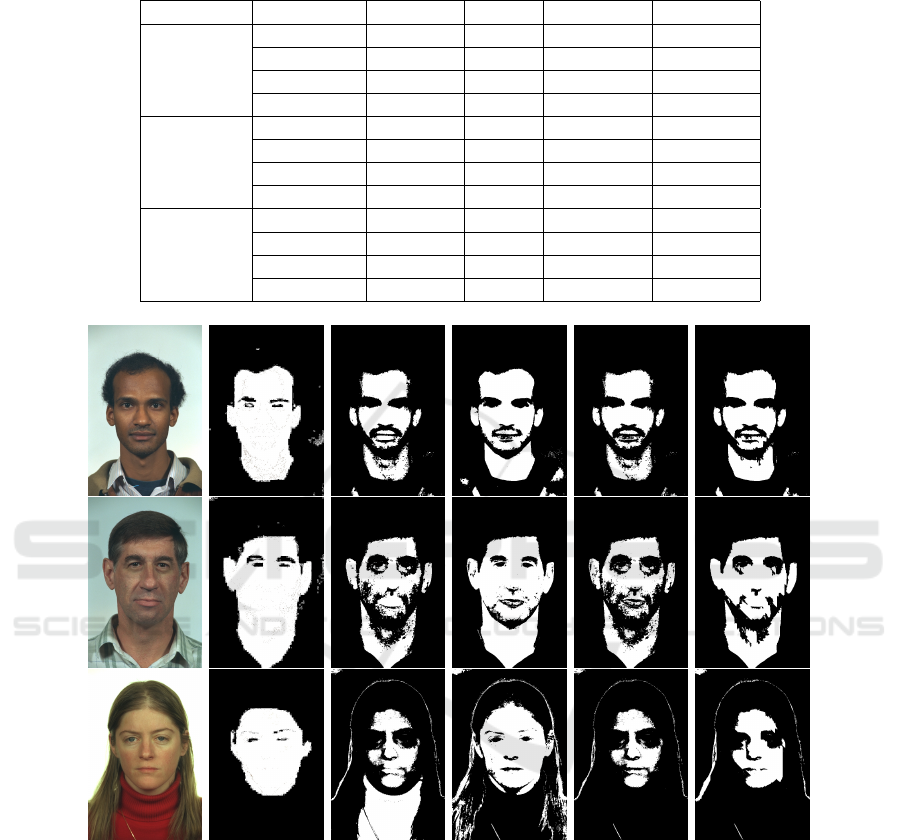
Table 1: Quantitative result metrics of the methods. For each dataset, we have four different applications: the original
hypothesis with respect to P
Cb
s
, the reverse hypothesis with respect to P
Cr
s
, the one which combines both, and the extension
using the neighborhood approach.
Dataset Hypothesis Precision Recall Specificity F-measure
HGR
Original 0.8938 0.7664 0.9274 0.8252
Reverse 0.7929 0.8429 0.8337 0.8171
Combined 0.8994 0.6952 0.9390 0.7843
Neighbors 0.8818 0.7935 0.9211 0.8353
Pratheepan
Original 0.5513 0.8199 0.8230 0.6592
Reverse 0.5249 0.7326 0.8188 0.6116
Combined 0.6681 0.6683 0.9164 0.6682
Neighbors 0.6280 0.7515 0.8871 0.6843
SFA
Original 0.8636 0.4214 0.9692 0.5664
Reverse 0.8563 0.7730 0.9381 0.8125
Combined 0.9288 0.3958 0.9894 0.5551
Neighbors 0.9176 0.5111 0.9826 0.6565
(a) (b) (c) (d) (e) (f)
Figure 4: Image samples with the results of each method in SFA dataset: (a) original image (b) ground truth (c) original
method (Brancati et al., 2017) (d) reverse method (e) combined method (f) neighbors method.
and Pratheepan. Moreover, the other metrics still are
in a very high rate for all datasets, being in the top
second in almost cases.
Therefore, the combined and extended approaches
are very competitive compared to the original method.
Furthermore, all the variations of the original method
are still computed in quadratic time, maintaining the
desired computational efficiency that are useful in dif-
ferent application domains, mainly near real time sys-
tems (processing time of about 10ms for a typical im-
age of dimensions 300x400).
Figures 4, 5, and 6, present some image sam-
ples in column (a) along with the results for each
method tested. Column (b) presents the respective
ground truth for each image in column (a), column (c)
presents the original method (Brancati et al., 2017)
results, column (d) presents the respective reverse
method results, column (e), the combined method
results and column (f) the extended neighborhood
method.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
314
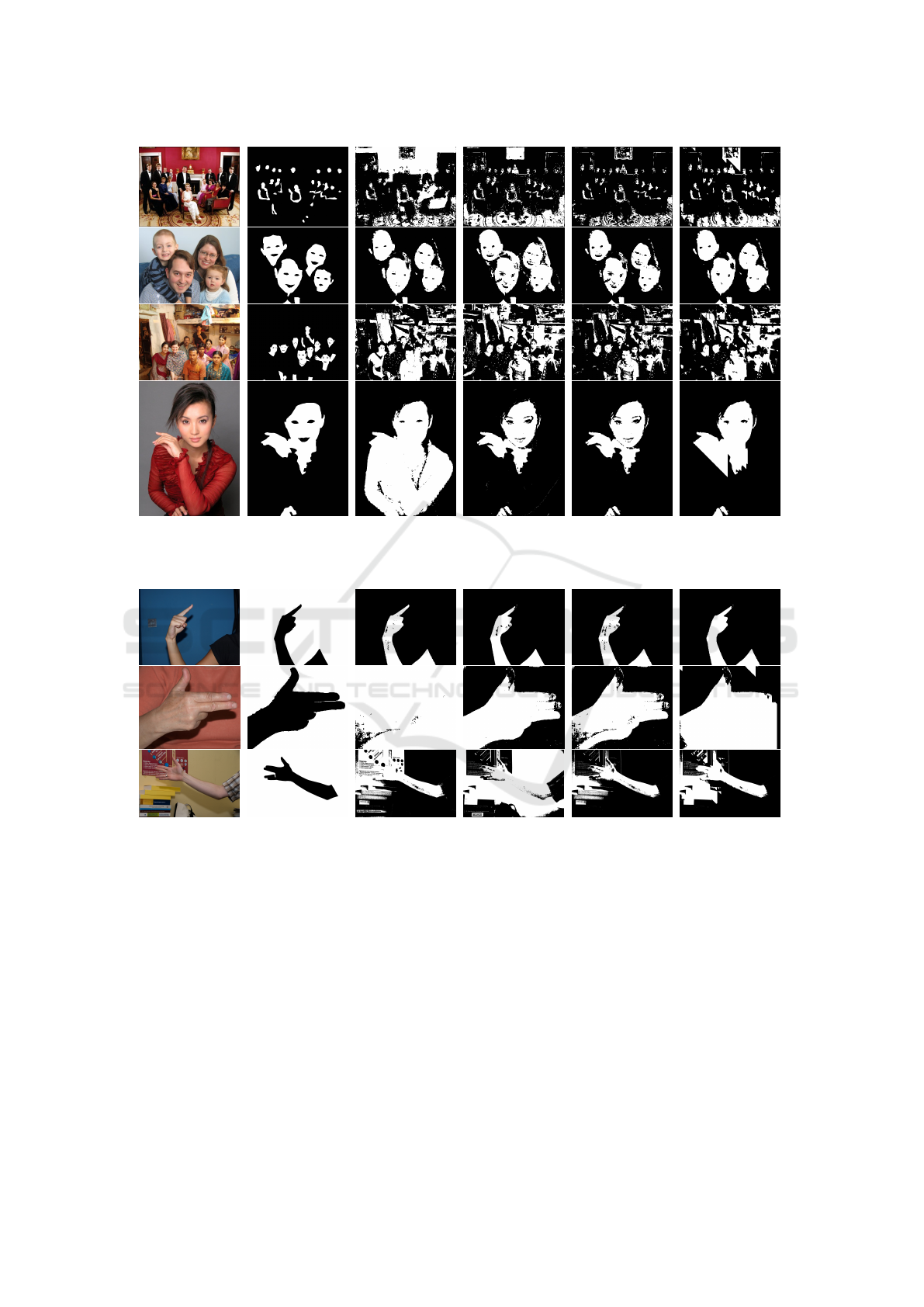
(a)
(b)
(c) (d) (e)
(f)
Figure 5: Image samples with the results of each method in Pratheepan dataset: (a) original image (b) ground truth (c) original
method (Brancati et al., 2017) (d) reverse method (e) combined method (f) neighbors method.
(a)
(b)
(c) (d) (e) (f)
Figure 6: Image samples with the results of each method in HGR dataset: (a) original image (b) ground truth (c) original
method (Brancati et al., 2017) (d) reverse method (e) combined method (f) neighbors method.
5 CONCLUSIONS
Human skin segmentation is still a unsolved problem,
mainly for real time applications. In (Brancati et al.,
2017), a surprisingly simple and clever method has
been presented and it established a new tier. We re-
produced the original experiments and also checked if
the same patterns were presented in RGB, HSV, and
Lab color spaces, or other applications as finding tree
leaves but the results were not consistent as the origi-
nal approach for human skin using YCbCr space.
In this paper, we introduced two extensions based
on a hypothesis that the original rule could be reversed
and also taking in consideration that a human skin
pixel does not appear isolated. Both extensions are
simple and do not hurt the efficiency of the original
method.
We tested the extensions in three standard public
datasets and the experiments show that our methods
improve the accuracy of skin detection, even when
there exists a huge variation in ethnicity and illumi-
nation. Moreover, our approach proved to be very
Combined Correlation Rules to Detect Skin based on Dynamic Color Clustering
315

competitive, outperforming alternative state-of-the-
art work.
Our results confirm that skin color is an extremely
powerful cue for detecting human skin in uncon-
strained imagery. Other local properties can be ex-
perimented to be used in a future work, along with
the methods presented here, such as texture, shape,
geometry, and other neighborhood operations.
In the future, we will explore further the connec-
tivity of the skin pixels and, because there is so far no
explanation why the original method works so well,
we plan to statistically analyse the shape of the trape-
zoids on the YCbCr space and try to correlate with the
classification accuracy.
Our intuition, based on the experimental results,
says that trapezoids features such as size, area, sym-
metry and others, could be used to establish a relation
with the classification accuracy. Moreover, if this re-
lationship exists, the shape of the trapezoids could be
previously processed, for instance by filtering image
illumination, to obtain better classification results.
ACKNOWLEDGEMENTS
The authors thanks CAPES and FAPESP (#
2015/01587-0) for financial support.
REFERENCES
Albiol, A., Torres, L., and Delp, E. J. (2001). Optimum
color spaces for skin detection. In International Con-
ference on Image Processing, pages 122–124.
Bergasa, L. M., Mazo, M., Gardel, A., Sotelo, M. A., and
Boquete, L. (2000). Unsupervised and adaptive gaus-
sian skin-color model. Image and Vision Computing,
18(12):987–1003.
Brancati, N., Pietro, G. D., Frucci, M., and Gallo, L. (2017).
Human skin detection through correlation rules be-
tween the YCb and YCr subspaces based on dynamic
color clustering. Computer Vision and Image Under-
standing, 155:33–42.
Casati, J. P. B., Moraes, D. R., and Rodrigues, E. L. L.
(2013). SFA: A human skin image database based
on FERET and AR facial images. In IX workshop de
Vis
˜
ao Computational.
Chai, D. and Ngan, K. N. (1999). Face segmentation us-
ing skin-color map in videophone applications. IEEE
Trans. on Circ. and Sys. for Video Tech., 9(4):551–
564.
Chaves-Gonz
´
alez, J. M., Vega-Rodr
´
ıguez, M. A., G
´
omez-
Pulido, J. A., and S
´
anchez-P
´
erez, J. M. (2010). De-
tecting skin in face recognition systems: A colour
spaces study. Digital Signal Processing, 20(3):806–
823.
Fleck, M. M., Forsyth, D. A., and Bregler, C. (1996). Find-
ing naked people. In European conference on com-
puter vision, pages 593–602. Springer.
Jayaram, S., Schmugge, S., Shin, M. C., and Tsap, L. V.
(2004). Effect of colorspace transformation, the illu-
minance component, and color modeling on skin de-
tection. In Proceedings of the 2004 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, volume 2, pages 813–818. IEEE.
Jones, M. J. and Rehg, J. M. (2002). Statistical color mod-
els with application to skin detection. International
Journal of Computer Vision, 46(1):81–96.
Kakumanu, P., Makrogiannis, S., and Bourbakis, N. (2007).
A survey of skin-color modeling and detection meth-
ods. Pattern recognition, 40(3):1106–1122.
Kaur, A. and Kranthi, B. V. (2012). Comparison between
YCbCr color space and CIELab color space for skin
color segmentation. International Journal of Applied
Information Systems, 3(4):30–33.
Kawulok, M., Kawulok, J., Nalepa, J., and Papiez, M.
(2013). Skin detection using spatial analysis with
adaptive seed. In 2013 IEEE International Conference
on Image Processing, pages 3720–3724. IEEE.
Kawulok, M., Kawulok, J., Nalepa, J., and Smolka, B.
(2014). Self-adaptive algorithm for segmenting skin
regions. EURASIP Journal on Advances in Signal
Processing, 2014(170):1–22.
Kovac, J., Peer, P., and Solina, F. (2003). Human skin color
clustering for face detection, volume 2. IEEE.
Kumar, A. and Malhotra, S. (2015). Performance analysis
of color space for optimum skin color detection. In
2015 Fifth Int. Conf. on Communication Systems and
Network Technologies, pages 554–558. IEEE.
Mahmoodi, M. R. and Sayedi, S. M. (2016). A comprehen-
sive survey on human skin detection. Int. Journal of
Image, Graphics and Signal Processing, 8(5):1–35.
Mart
´
ınez, A. and Benavente, R. (1998). The AR face
database. Technical report, Purdue University.
Naji, S. A., Zainuddin, R., and Jalab, H. A. (2012). Skin
segmentation based on multi pixel color clustering
models. Digital Signal Processing, 22(6):933–940.
Phillips, P. J., Wechsler, H., Huang, J., and Rauss,
P. J. (1996). The facial recognition technology
(FERET) database. https://www.nist.gov/programs-
projects/face-recognition-technology-feret.
Shaik, K. B., P., G., Kalist, V., Sathish, B. S., and Jenitha, J.
M. M. (2015). Comparative study of skin color detec-
tion and segmentation in HSV and YCbCr color space.
Procedia Computer Science, 57:41–48.
Tan, W. R., Chan, C. S., Yogarajah, P., and Condell, J.
(2012). A fusion approach for efficient human skin
detection. IEEE Trans. on Ind. Inf., 8(1):138–147.
Vezhnevets, V., Sazonov, V., and Andreeva, A. (2003). A
survey on pixel-based skin color detection techniques.
In IN PROC. GRAPHICON-2003, pages 85–92.
Yogarajah, P., Condell, J., Curran, K., McKevitt, P., and
Cheddad, A. (2011). A dynamic threshold approach
for skin tone detection in colour images. International
Journal of Biometrics, 4(1):38–55.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
316
