
Learning Transformation Invariant Representations
with Weak Supervision
Benjamin Coors
1,2
, Alexandru Condurache
2
, Alfred Mertins
3
and Andreas Geiger
1,4
1
Autonomous Vision Group, MPI for Intelligent Systems, T
¨
ubingen, Germany
2
Robert Bosch GmbH, Leonberg, Germany
3
Institute for Signal Processing, University of L
¨
ubeck, Germany
4
Computer Vision and Geometry Group, ETH Z
¨
urich, Switzerland
Keywords:
Deep Learning, Transformation Invariance, Weak Supervision, Object Recognition.
Abstract:
Deep convolutional neural networks are the current state-of-the-art solution to many computer vision tasks.
However, their ability to handle large global and local image transformations is limited. Consequently, exten-
sive data augmentation is often utilized to incorporate prior knowledge about desired invariances to geometric
transformations such as rotations or scale changes. In this work, we combine data augmentation with an unsu-
pervised loss which enforces similarity between the predictions of augmented copies of an input sample. Our
loss acts as an effective regularizer which facilitates the learning of transformation invariant representations.
We investigate the effectiveness of the proposed similarity loss on rotated MNIST and the German Traffic
Sign Recognition Benchmark (GTSRB) in the context of different classification models including ladder net-
works. Our experiments demonstrate improvements with respect to the standard data augmentation approach
for supervised and semi-supervised learning tasks, in particular in the presence of little annotated data. In
addition, we analyze the performance of the proposed approach with respect to its hyperparameters, including
the strength of the regularization as well as the layer where representation similarity is enforced.
1 INTRODUCTION
A central problem in computer vision is to train clas-
sifiers which are robust to geometric transformations
of the input that are irrelevant to the problem at hand.
The most commonly used solution to ensure robus-
tness of a classifier to geometric transformations is
data augmentation (Simard et al., 2003; Krizhevsky
et al., 2012; Laptev et al., 2016). Data augmentation
artificially enlarges the training set and acts as a re-
gularizer, which prevents a classifier from overfitting
to the training set. As an alternative to data augmen-
tation, transformation invariances can be directly en-
coded into the convolutional filters of convolutional
neural networks (CNNs) (Cohen and Welling, 2016;
Worrall et al., 2017; Zhou et al., 2017). However,
these approaches are currently limited to simple ge-
ometric transformations such as rotations.
In this work, we propose to leverage an unsuper-
vised similarity loss for training deep neural networks
invariant to arbitrary transformations. The similarity
loss is computed with respect to transformed copies
of an input and presents a very simple and effective
regularizer, enforcing the desired transformation in-
variances. In contrast to na
¨
ıve data augmentation, it
encourages smooth decision boundaries with respect
to transformations of the input and leads to higher per-
formance, in particular in the presence of little anno-
tated examples. Besides, our method allows for easy
incorporation of additional unlabeled examples, as the
similarity loss does not utilize label information and
is thus suitable for semi-supervised learning tasks. To
the best of our knowledge, this is the first work to pro-
pose a similarity loss for training transformation inva-
riant CNNs with weak supervision. The contributions
of this paper are:
• We propose a similarity loss which acts as an ad-
ditional regularizer and utilizes unlabeled training
data for learning transformation invariance.
• We present a detailed investigation on the weig-
hting and placement of the loss.
• We show improved performance in supervised
and semi-supervised learning on rotated MNIST
and GTSRB when little labeled data is available.
64
Coors, B., Condurache, A., Mertins, A. and Geiger, A.
Learning Transformation Invariant Representations with Weak Supervision.
DOI: 10.5220/0006549000640072
In Proceedings of the 13th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2018) - Volume 5: VISAPP, pages
64-72
ISBN: 978-989-758-290-5
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
As an alternative to data augmentation, knowledge
about geometric transformations can be directly en-
coded into the filters of a convolutional neural net-
work. Scattering convolution networks use predefi-
ned wavelet filters to create networks that are invari-
ant to translations, rotations, scaling and deformati-
ons (Bruna and Mallat, 2013; Sifre and Mallat, 2013).
While scattering networks guarantee stability to ge-
ometric transformations, their parameters cannot be
trained and thus they are generally outperformed by
supervised deep convolutional networks (Oyallon and
Mallat, 2015).
Consequently, several recent works have sugge-
sted to combine the encoding of invariances with the
learning of the convolutional filters (Kivinen and Wil-
liams, 2011; Sohn and Lee, 2012; Cohen and Welling,
2016; Worrall et al., 2017; Zhou et al., 2017). Trans-
formation invariant or equivariant restricted Boltz-
mann machines infer the best matching filters by
transforming them using linear transformations (Ki-
vinen and Williams, 2011; Sohn and Lee, 2012). Si-
milarly, group equivariant CNNs apply learned base
filters under different transformations and pool their
responses to create invariant representations (Cohen
and Welling, 2016). Harmonic networks exhibit glo-
bal rotation equivariance (Worrall et al., 2017). While
these works have demonstrated state-of-the-art results
and shown promise in improving the data-efficiency
of deep convolutional networks, they are, unlike our
approach, typically restricted to simple transformati-
ons (e.g, rotations).
Another approach to transformation invariance in
CNNs is to resample the input space. An exam-
ple for this approach are spatial transformer networks
(STNs) (Jaderberg et al., 2015), which use a separate
network to learn the parameters of a spatial transfor-
mation of an input. Based on the predicted trans-
formation parameters a sampling grid is created and
applied to the input. A more lightweight alternative
to STNs are deformable convolutional networks (Dai
et al., 2017), which do not learn transformation pa-
rameters or warp the feature map but instead directly
learn offsets to the regular sampling grid of standard
convolutions. While these approaches increase the
flexibility of neural networks in handling geometric
transformations, they assume that a canonical repre-
sentation can be easily deduced from the input.
Because of the shortcomings of the aforementi-
oned techniques, data augmentation remains one of
the most commonly used solutions for making deep
networks invariant to complex input transformati-
ons (Simard et al., 2003; Krizhevsky et al., 2012).
A recently proposed variant of data augmentation is
transformation-invariant pooling (TI-pooling) (Lap-
tev et al., 2016), which feeds multiple augmented
copies of an input into the network and pools their
responses. While this simple idea works well in
practice, test time complexity grows exponentially
with the dimension of the transformation, rendering
this approach infeasible for real-time applications. In
contrast, our loss encourages representation similarity
during training and does not affect test time perfor-
mance.
The proposed approach is also related to the to-
pic of self-supervised learning, where freely avai-
lable auxiliary labels are used to train algorithms
without human supervision. Recently proposed
proxy tasks for self-supervision include context pre-
diction (Doersch et al., 2015), solving jigsaw puzz-
les (Noroozi and Favaro, 2016) or predicting egomo-
tion signals (Agrawal et al., 2015). Compared to these
works on self-supervision, our work does not use an
auxiliary training loss but directly optimizes the desi-
red loss metric.
The idea of using an input sample more than once
in each training step has previously been proposed
in the context of protecting neural networks against
adversarial perturbations (Zheng et al., 2016; Miyato
et al., 2016). Similar to the idea of improving mo-
del generalization by injecting adversarial examples
during training, we aim to improve model generali-
zation w.r.t. transformations by enforcing similarity
between feature representations of transformed input
images.
Besides, state-of-the-art results in semi-
supervised learning have been recently presen-
ted using a similarity loss in combination with a
mutual-exclusivity loss (Sajjadi et al., 2016) or via an
imaginary walker that is tasked with forming ”associ-
ations” between embeddings (Haeusser et al., 2017).
In contrast to these works, here we investigate the uti-
lity of a similarity loss when learning representations
invariant to geometric transformations and present
a detailed analysis on the placement and weighing
of the loss. Our loss applies to the supervised and
semi-supervised setting and is particularly effective
in the presence of little labeled data.
3 METHOD
While the proposed similarity loss is applicable to
a variety of tasks, we use image classification as a
test bench in this work. Let x ∈ R
w×h×c
denote an
image of dimensions w ×h with c channels and let f :
R
w×h×c
→ R
C
be a non-linear mapping represented
Learning Transformation Invariant Representations with Weak Supervision
65

by a neural network which takes an input image x and
produces a score for each of the C classes. Let further
t
0
,t
1
∈ T denote two transformations from a set of
transformations T (e.g, rotation, affine, perspective)
which take the input image x and produce transfor-
med versions t
0
(x) ∈ R
w×h×c
and t
1
(x) ∈ R
w×h×c
of
it. Finally, let f
l
(t(x)) denote the feature maps of the
neural network in layer l when passing t(x) as input.
For clarity, we will drop the dependency on the input
image x in the following.
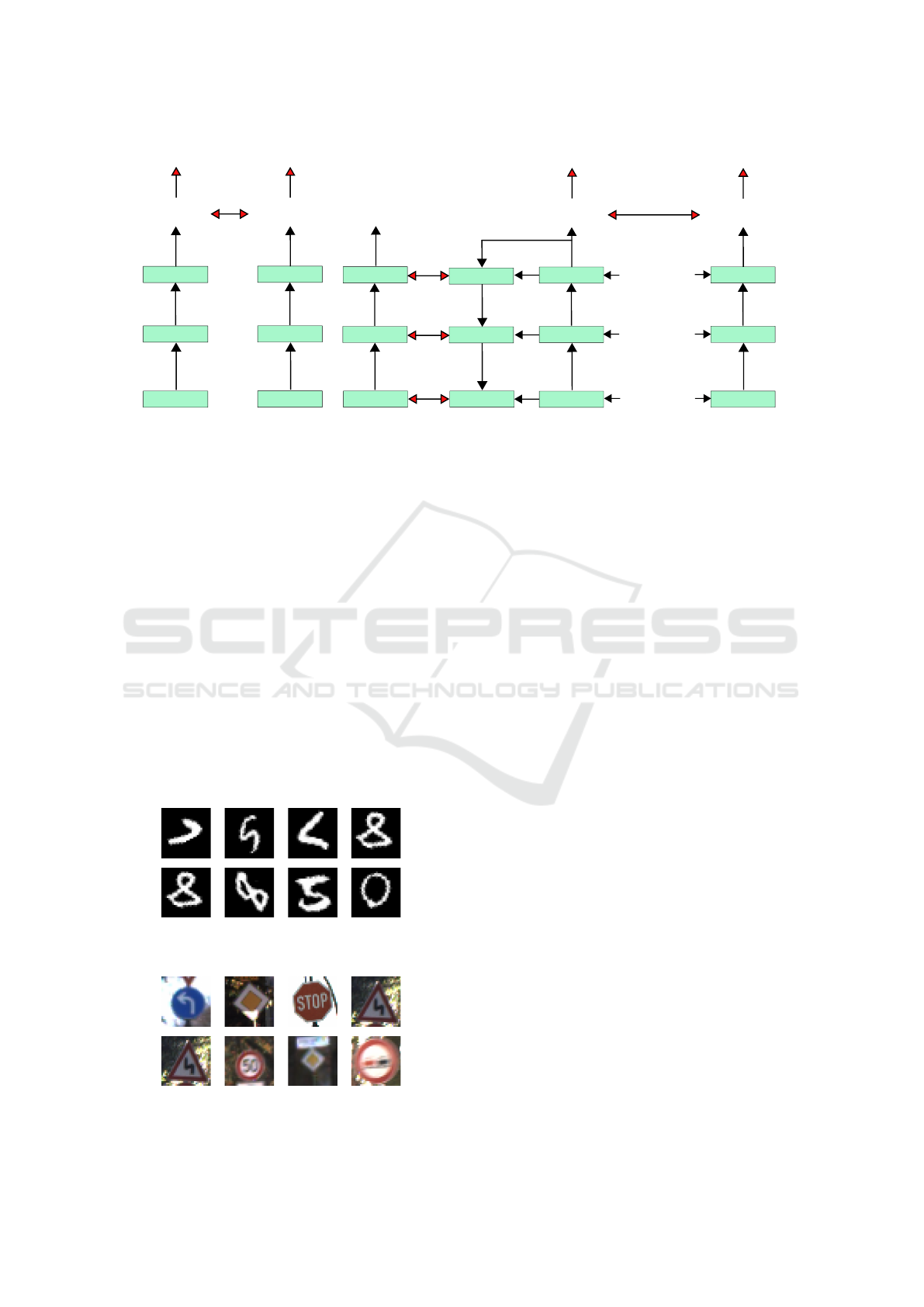
In order to encourage a neural network to learn
transformation invariant representations, we propose
the use of a similarity loss L
sim
which penalizes large
distances between the predictions or feature embed-
dings of transformed copies of the input. The simila-
rity loss is computed using a siamese network archi-
tecture, where the transformed copies of the input are
simultaneously fed into separate streams of the net-
work that share their weights. By transforming both
inputs, convergence of the model is accelerated and
overfitting to small label sets is avoided. An abstract
network architecture, where the similarity loss is ap-
plied at the final layer L, is illustrated in Figure 1(a).
At inference time only a single stream of the net-
work is used, keeping runtime constant with respect
to the size of the transformation space.
The similarity loss L
sim
is added to the supervised
classification loss L
c
, which is applied on the output
of both network streams, to form the total loss L
total
for a data point where a weight parameter λ controls
the influence of L
sim
:
L
total
= L
c
+ λL
sim
(1)
Here, L
c
is the usual cross-entropy loss applied to the
softmax outputs σ( f
L
(t
0
)) and σ( f
L
(t
1
)) of the final
network layer L for the transformed input sample:
L
c
= −
C
∑
i=1
y
i
logσ
i
( f
L
(t
0
)) −
C
∑
i=1
y
i
logσ
i
( f
L
(t
1
)) (2)
where σ
i
(x) = exp(x
i
)/
∑
C
j=1
exp(x
j
) denotes the soft-
max function and y
i
= 1 if i is the ground truth class
and y
i
= 0 otherwise.
The similarity loss encourages the output of the
neural network at layer l, f
l
, to be similar for both
streams. It is defined as the distance between the out-
puts of the transformed input pair at layer l for an ap-
propriate distance metric D(·,·):
L
sim
= D( f
l
(t
0
), f
l
(t
1
)) (3)
We propose to use a distance metric which measu-
res the correspondence between the likelihood of the
transformed input copies. More specifically, D(·,·)
is calculated by flattening the network output f
l
at a
given layer l and applying the softmax activation:
D( f
l
(t
0
), f
l
(t
1
)) = −
C
∑
i=1
σ
i
( f
l
(t
0
))log σ
i
( f
l
(t
1
)) (4)
A similar distance metric has previously been pro-
posed by Zheng et al. (2016) in order to stabilize mo-
dels against small input perturbations such as the ad-
dition of uncorrelated Gaussian noise. It is inspired by
the work of Miyato et al. (2016) on virtual adversarial
training, which showed that a distance function based
on the Kullback-Leibler (KL) divergence smoothens
the model distribution with respect to the input around
each data point. Our work extends this approach to
training models for invariance to geometric transfor-
mations of the input and is the first to perform a de-
tailed investigation on the optimal weighing and pla-
cement of the loss.
Since the similarity loss L
sim
does not require la-
bel information, it enables semi-supervised learning
with partially labeled data. Until recently, ladder net-
works were the state-of-the-art architecture for semi-
supervised learning (Rasmus et al., 2015). Ladder
networks are denoising autoencoders with lateral con-
nections, into which the similarity loss L
sim
can be
easily integrated by duplicating the corrupted or un-
corrupted encoder path of the ladder network. The
duplicated encoder path again shares its weight with
the other encoder paths of the ladder network. A sim-
ple ladder network architecture where the corrupted
encoder path of the ladder network is duplicated and
L
sim
is applied on the final output layer L is illustrated
in Figure 1(b).
As before, L
sim
is added to the total loss L
total
where it serves as a second unsupervised loss next to
the denoising loss L
denoise
, which aims to minimize
the difference between a clean layer output f
l
and the
output of a denoising function
ˆ
f
l
given a corrupted
output
˜
f
l
on all L layers of the network. The classifi-
cation loss L
c
is then computed on the outputs of the
noisy encoder paths
˜
f
L
where α is a weight parameter
of the denoising loss L
denoise
and f
0
(t
0
) = t
0
.
L
total
= L
c
+ αL
denoise
+ λL
sim
(5)
L
c
= −
C
∑
i=1
y
i
logσ
i
(
˜
f
L
(t
0
)) −
C
∑
i=1
y
i
logσ
i
(
˜
f
L
(t
1
))
(6)
L
denoise
=
L
∑
l=0
|| f
l
(t
0
) −
ˆ
f
l
(t
0
)||
2
(7)
In all models, the classification loss L
c
is only ap-
plied on the labeled training samples. On the other
hand, the similarity loss L
sim
and, in case of a lad-
der network, the denoising loss L
denoise
can be applied
on both labeled and unlabeled samples of the training
data.
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
66
L
sim
t
1
σ( f
2
(t
1
))
L
c
t
0
σ( f
2
(t
0
))
L
c
f
2
(t
0
)
f
1
(t
0
)
f
2
(t
1
)
f
2
(t
1
)
(a) Siamese Network
N (0,σ
2
)
L
sim
˜
t
1
N (0,σ
2
)
N (0,σ
2
)
σ(
˜
f
2
(t
1
))
σ( f
2
(t
0
))
t
0
L
c
L
denoise
L
denoise
˜
t
0
σ(
˜
f
2
(t
0
))
L
c
L
denoise
f
1
(t
0
)
f
2
(t
0
)
ˆ
f
2
(t
0
)
ˆ
f
1
(t
0
)
ˆ
t
0
˜
f
2
(t
0
)
˜
f
1
(t
0
)
˜
f
2
(t
1
)
˜
f
2
(t
1
)
(b) Ladder Network
Figure 1: Abstract network architectures considered in this work. A similarity loss L
sim
is placed on the the final layer of the
network in order to enforce similarity between outputs of transformed copies of an input.
4 EXPERIMENTS
We first validate our approach in terms of learning ro-
tation invariant representations on the classical rota-
ted MNIST task (Larochelle et al., 2007). Second,
we demonstrate the effectiveness of our technique on
the more challenging German Traffic Sign Recogni-
tion Benchmark (GTSRB) (Stallkamp et al., 2012).
Incorporating perspective invariances using the pro-
posed similarity loss, our method leads to significant
improvements over the baselines for this task.
4.1 Experimental Setup
The rotated MNIST classification task (Larochelle
et al., 2007) is the standard benchmark for evaluating
Figure 2: Example images from rotated MNIST (Larochelle
et al., 2007).
Figure 3: Example images from GTSRB (Stallkamp et al.,
2012).
transformation invariance in neural networks (Sohn
and Lee, 2012; Cohen and Welling, 2016; Laptev
et al., 2016; Worrall et al., 2017), despite possible
ambiguities between rotated digits such as a rotated
6 and 9. The rotated MNIST dataset (see Figure 2)
was created by rotating MNIST digits with uniformly
sampled angles between 0 and 2π radians and consists
of 12,000 training and 50, 000 test samples. As in the
original MNIST dataset (Lecun et al., 1998), the ima-
ges are greyscale and of size 28 × 28 pixels. We split
the dataset into 10, 000 training and 2,000 validation
samples for determining the hyperparameter λ.
The German Traffic Sign Recognition Benchmark
(GTSRB) (Stallkamp et al., 2012) consists of 39,209
training and 12,630 test images with 43 classes in to-
tal. We rescale the original images (see Figure 3) of
varying size to 32 × 32 pixels and normalize them.
In order to perform a fair comparison between
data augmentation and the use of a similarity loss, we
make sure that every model is being shown the same
amount of data in each training epoch. As a simila-
rity loss model utilizes each input sample x twice in
every training step under the transformations t
0
and
t
1
, we also present t
0
and t
1
to the data augmenta-
tion baseline in each training step. During training,
data augmentation is performed online in a randomi-
zed manner. For rotated MNIST, t
0
and t
1
rotate the
input x in every training step with an angle which is
uniformly sampled between 0 and 2π radians.
In the case of GTSRB, we train for invariance to
projective transformations, as traffic signs need to be
correctly classified from different angles and distan-
ces. The augmentation with a projective transforma-
tion is performed by estimating an essential matrix
Learning Transformation Invariant Representations with Weak Supervision
67
using the eight-point algorithm from a set of point
correspondences between the image corners and a
randomized set of points. These points are randomly
sampled from a uniform distribution within a distance
of ±6 pixels in both dimensions of the image corners.
For all experiments we use the same randomiza-
tion seeds for model comparisons but vary the seed
across runs and for all experiments report the average
numerical results over five independent runs.
4.2 Supervised Learning on Rotated
MNIST Subset
For supervised learning, we integrate the similarity
loss L
sim
into an all convolutional network architec-
ture (Springenberg et al., 2015) and use a subset of
N
s
= 100 labeled samples of the rotated MNIST da-
taset for training, where each class is represented
equally often (i.e., 10 times).
Our network closely resembles the CNN reference
architecture for the rotated MNIST task in (Cohen and
Welling, 2016). This network is constructed from se-
ven convolutional layers, where each but the last layer
uses filters of size 3 × 3 while the last layer uses fil-
ters of size 4×4. The convolutional filters are applied
with a stride of 1 × 1. A max-pooling layer of stride
and size 2 × 2 is inserted after the second convoluti-
onal layer. All but the last layer use batch normali-
zation (Ioffe and Szegedy, 2015) before ReLU nonli-
nearities, followed by dropout with a keep probability
of p = 0.7. On the last layer the softmax activation
is applied. We use the Adam optimizer (Kingma and
Ba, 2015) with a base learning rate of 0.001 and train
with 100 samples per mini-batch.
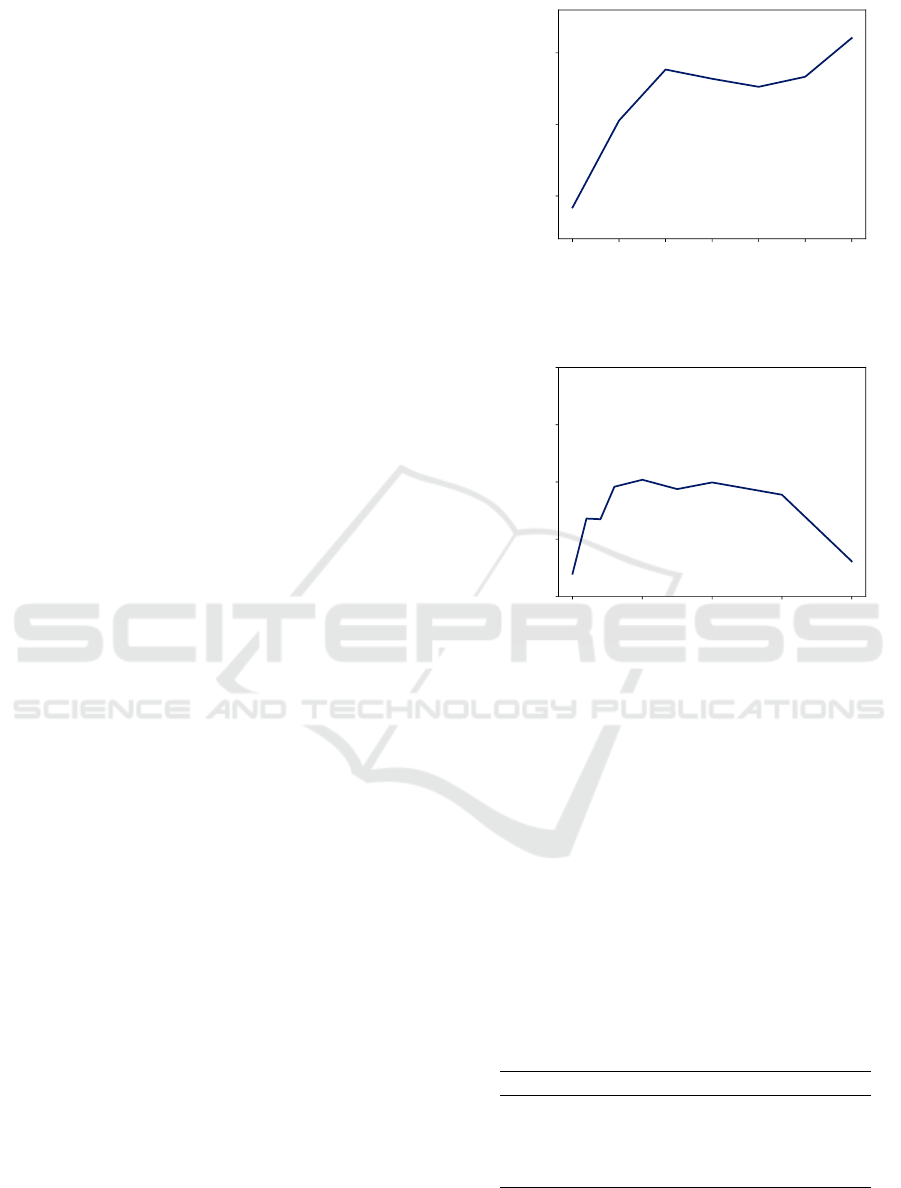
In a first experiment, we evaluate the effect of ap-
plying the similarity loss on different layers l of the
network (see Figure 4). We find that applying the si-
milarity loss on the last layer results in the highest
validation accuracy. This result is in line with fin-
dings by Cohen and Welling (2016), which showed
that enforcing premature invariance in early layers of
the network is undesirable. For all future experiments,
we therefore only apply the similarity loss on the final
output layer L of a network.
In addition, we perform a coarse hyperparame-
ter search with a selected set of weight parameters
λ ∈ [1.0,2.0, 3.0, 5.0,7.5,10.0,15.0,20.0]. The re-
sults are plotted in Figure 5 and show improved vali-
dation accuracies for a wide range of λ values compa-
red to using only data augmentation (λ = 0.0). While
the performance is very robust to the choice of the
weight parameter λ, we can observe a drop in valida-
tion accuracy when λ is large (λ = 20.0).
Table 1 confirms performance improvements on
1 2 3 4 5 6 7
l
0.75
0.80
0.85
validation accuracy
Figure 4: Hyperparameter study for the similarity loss layer
l on the supervised rotated MNIST task.
0 5 10 15 20
λ
0.84
0.85
0.86
0.87
0.88
validation accuracy
Figure 5: Hyperparameter study for the weight parameter λ
on the supervised rotated MNIST task.
the test set for the proposed similarity loss with λ =
5.0 when training for 100 epochs with N
s
= 100 la-
beled samples. Compared to a test error of 14.8%
when training with data augmentation, we obtain an
improved test error of 13.4% when training with
an additional similarity loss. Additionally, we also
obtain a better test error than our reimplementati-
ons of a harmonic network (Worrall et al., 2017)
and a group-equivariant P4CNN (Cohen and Wel-
ling, 2016), which replace the regular convolutions
in the network architecture with harmonic or group-
equivariant convolutions, respectively.
Table 1: Results for the supervised rotated MNIST task with
N
s
= 100.
Method Test error (%)
Worrall et al. (2017) 21.5
Data augmentation 14.8
Cohen and Welling (2016) 14.2
Similarity loss 13.4
As a baseline we also evaluate the performance on
the full dataset of 12,000 labeled examples. Here, no
significant improvement is obtained by the similarity
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
68
loss compared to a data augmentation model (see Ta-
ble 2). Both data-driven methods are outperformed by
harmonic networks (Worrall et al., 2017) and a group-
equivariant P4CNN (Cohen and Welling, 2016).
Table 2: Results for the supervised rotated MNIST task with
N
s
= 12,000.
Method Test error (%)
Data augmentation 3.7
Similarity loss 3.6
Cohen and Welling (2016) 2.28
Worrall et al. (2017) 1.69
Our results suggest that applying a similarity loss
improves generalization and outperforms data aug-
mentation as well as encoded transformation invari-
ances when the number of labeled samples is small.
4.3 Semi-Supervised Learning
The unsupervised nature of the similarity loss L
sim
makes it suitable as an additional guidance for semi-
supervised learning problems in order to utilize unla-
beled data during training.
4.3.1 Rotated MNIST
As a first architecture for semi-supervised learning
on rotated MNIST, we use the convolutional archi-
tecture from Section 4.2 and a subset of N
s
= 100
labeled samples. Additionally, we use the remai-
ning training samples as unlabeled data. Each mini-
batch is constructed from 100 labeled and 100 un-
labeled samples, where L
c
is only applied on the
labeled samples while L
sim
is applied on the full
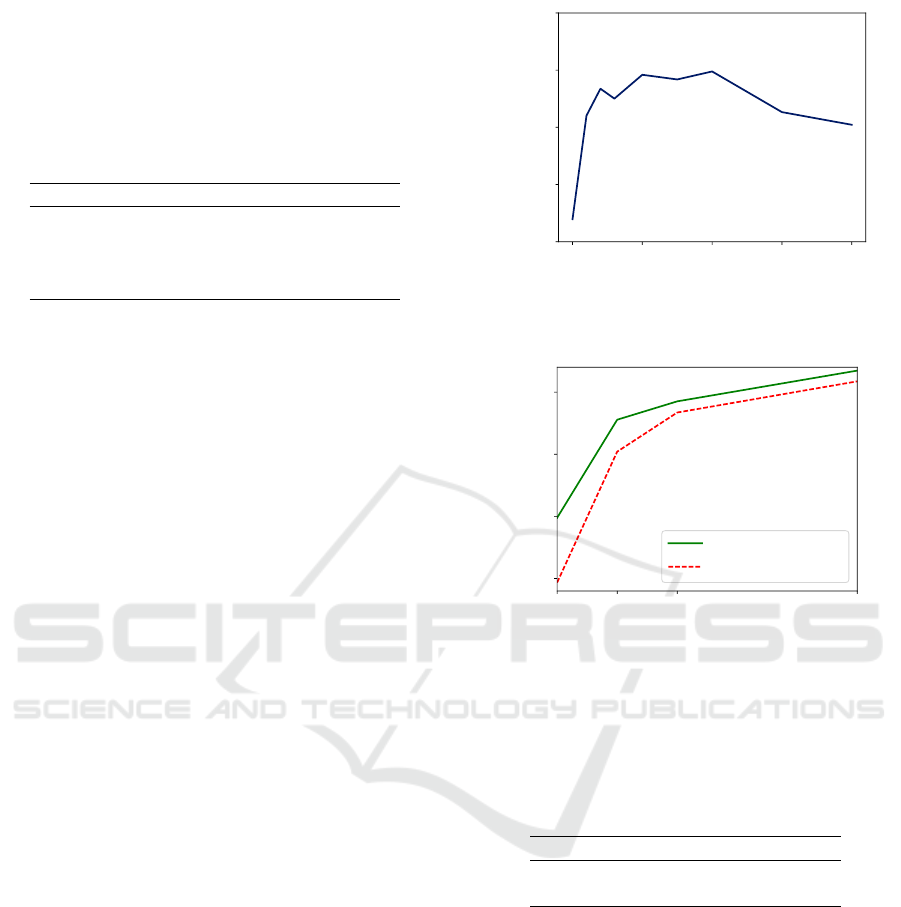
minibatch. As before, we perform a hyperparame-
ter study of the λ weight parameter from a set λ ∈
[1.0,2.0, 3.0, 5.0,7.5,10.0,15.0,20.0] (see Figure 6).
When comparing to the λ-study for supervised lear-
ning (see Figure 5), we can now observe higher va-
lidation accuracies and again find the performance to
be very robust.
Additionally, we perform a data ablation study
where we vary the size of the labeled training set N
s
.
The results of the data ablation study are visualized
in Figure 7. The figure demonstrates that the simi-
larity loss is especially helpful when only very little
labeled data is available. The benefit of a similarity
loss (for a weight parameter of λ = 10.0 and 100 trai-
ning epochs) is confirmed on the test set where the
final test error is lowered by more than 2% compared
to training only with data augmentation (see Table 3).
Furthermore, the final test error is more than 1% lo-
wer compared to using the similarity loss on only the
0 5 10 15 20
λ
0.84
0.85
0.86
0.87
0.88
validation accuracy
Figure 6: Hyperparameter study for λ on semi-supervised
rotated MNIST.
50 100 150 300
N
s
0.75
0.80
0.85
0.90
test accuracy
similarity loss
data augmentation
Figure 7: Accuracy vs. number of training samples on semi-
supervised rotated MNIST.
labeled images, which confirms the ability of the si-
milarity loss to exploit additional unlabeled data.
Table 3: Results for the semi-supervised rotated MNIST
task with N
s
= 100.
Method Test error (%)
Data augmentation 14.8
Similarity loss 12.2
We also observe improved class separability when
visualizing the learned feature representations in the
last layer of the model (see Figure 8).
For a second set of semi-supervised learning ex-
periments, we incorporate the similarity loss into the
fully connected ladder network architecture proposed
by Rasmus et al. (2015) for the permutation invariant
MNIST task. It features layers of size 784-1000-500-
250-250-250-10 with respective denoising weight
parameters α = [1000.0,10.0,0.10, 0.1, 0.1,0.1,0.1].
The noisy encoder path uses Gaussian corruption
noise with standard deviation 0.3. We train the net-
work with mini-batches of 100 labeled and 256 unla-
beled samples using the Adam optimizer and a base
learning rate of 0.02 for 300 training epochs.
Learning Transformation Invariant Representations with Weak Supervision
69
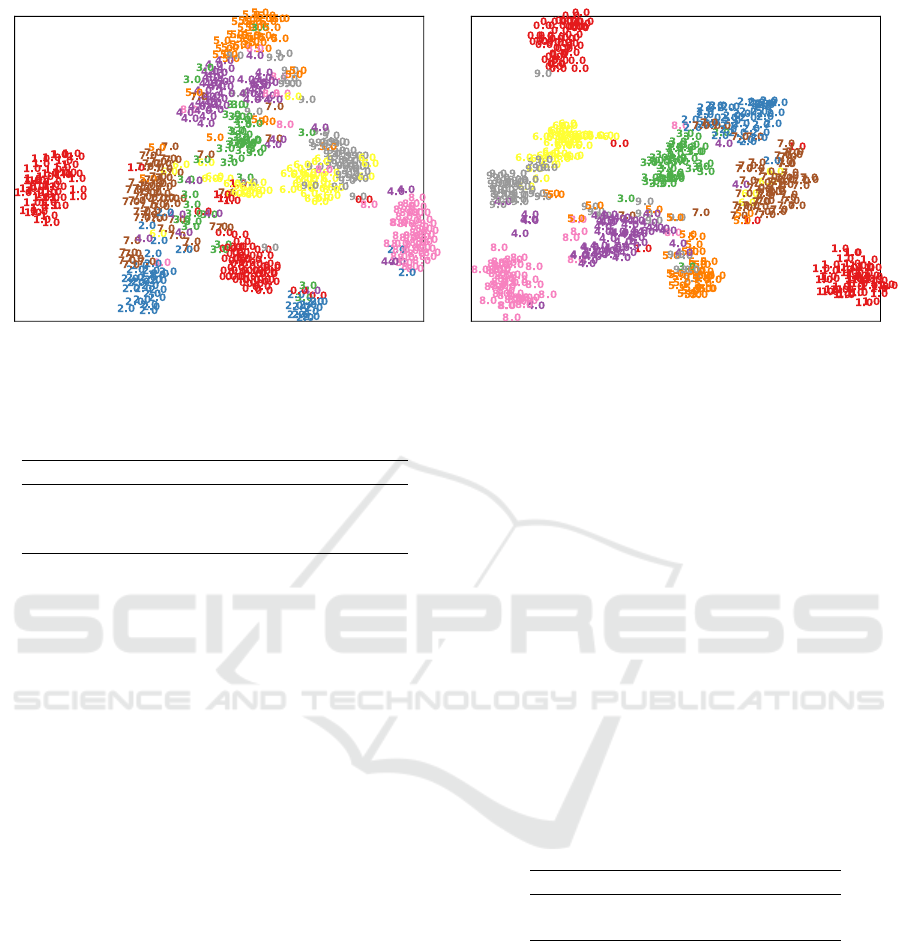
(a) Data Augmentation (b) Similarity Loss
Figure 8: t-SNE visualizations of the learned feature representations on the final network layer.
Table 4: Ladder network results for semi-supervised rotated
MNIST task with N
s
= 100.
Method Test error (%)
Data augmentation 8.0
Similarity loss (clean path) 7.6
Similarity loss (noisy path) 6.8
Table 4 displays the final test accuracies for uti-
lizing our similarity loss in a ladder network with a
weight parameter of λ = 20.0, which was determined
in a separate hyperparameter search. We again find
the addition of a similarity loss to be beneficial. In-
corporating it in the noisy encoder path results in a
better performance of 6.8% compared to a final test
error of 7.6% in the clean encoder path. This can be
explained by the Gaussian noise of the noisy encoder
path providing additional regularization. Our results
demonstrate that the use of a similarity loss also ena-
bles improving the performance of a previous state-
of-the-art model architecture, specially designed for
the semi-supervised learning task.
4.3.2 German Traffic Sign Recognition
Benchmark
As a final experiment, we consider the German Traffic
Sign Recognition Benchmark (GTSRB) (Stallkamp
et al., 2012). The network architecture for this task is
an all-convolutional model, which resembles the All-
CNN-C architecture proposed by Springenberg et al.
(2015) for the CIFAR-10 task (Krizhevsky, 2009). It
consists of nine convolution layers. The first four lay-
ers have 96, the, following layers 192 filters, all of
size 3 × 3. They are applied with stride 1 except in
the third and sixth layer where a stride of 2 is used.
After the final convolutional layer average pooling is
performed. Dropout is applied on the input with a pro-
bability of 0.2 and on the convolutional feature maps
with 0.5. All layers use ReLU nonlinearities, batch
normalization and weight decay of 0.001. A softmax
activation is applied after the final layer. The net-
work is trained with stochastic gradient descent and
Momentum with mini-batches of 100 labeled and 100
unlabeled samples. A learning rate of 0.05 is decayed
over the course of 100 training epochs.
In contrast with previous experiments on rotated
MNIST, we now train for invariance to projective
transformations. Unlike rotations, these cannot be ea-
sily encoded into the convolutional filters of a neural
network. Here, the use of a similarity loss, which re-
lies on augmenting the training data (as described in
Section 4.1), offers a simple, yet effective solution to
train CNNs for invariance to more complex geometric
transformations.
Table 5: Results for the semi-supervised GTSRB task with
N
s
= 2150.
Method Test error (%)
Data augmentation 14.8
Similarity loss 9.6
The test results for semi-supervised learning on
the GTSRB task for 50 samples per class (i.e., 2150
samples in total) and λ = 10.0 are displayed in Table
5. We observe a clear improvement in the final test
accuracy from 14.8% to 9.6% when utilizing the si-
milarity loss, despite the model already being heavily
regularized by dropout, weight decay and batch nor-
malization, which again indicates the effectiveness of
the similarity loss when little labeled data is available.
As for rotated MNIST, we again perform a data
ablation study (see Figure 9). The study shows that
the improvement when using an additional similarity
loss is largest when N
s
is small, but that even for lar-
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
70
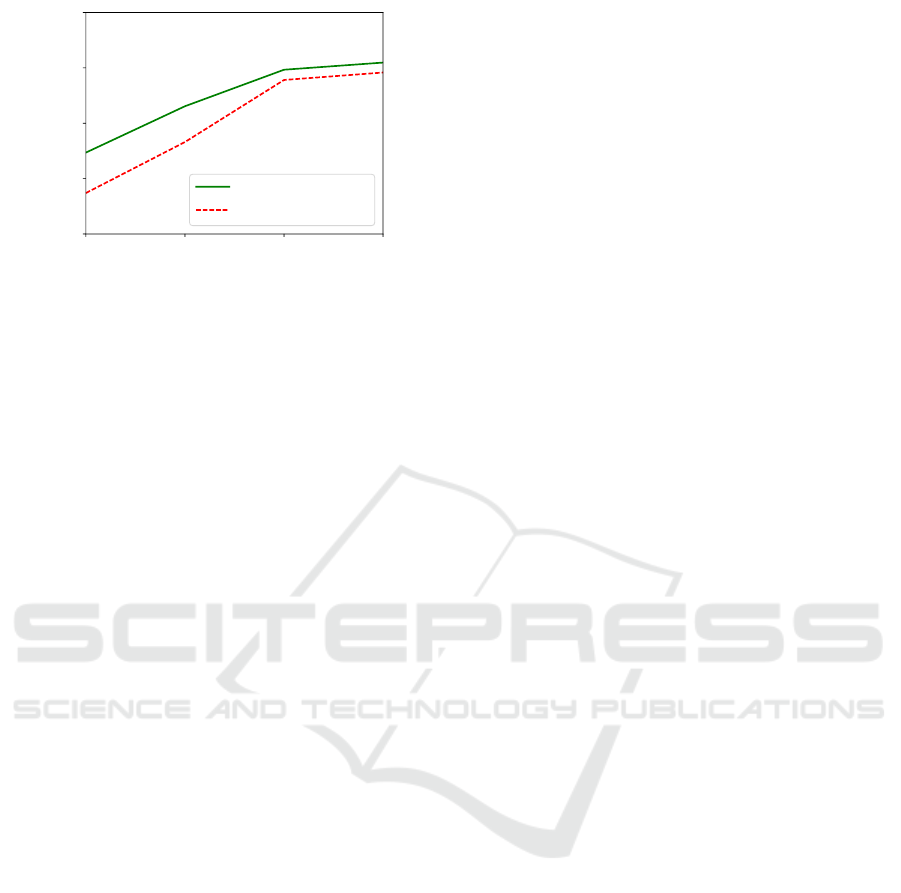
2150 4300 6450 8600
N
s
0.80
0.85
0.90
0.95
1.00
test accuracy
similarity loss
data augmentation
Figure 9: Accuracy vs. number of training samples on semi-
supervised GTSRB.
ger sizes of the labeled training set the similarity loss
outperforms the data augmentation model.
5 DISCUSSION
The experiments in Section 4 demonstrate the benefits
of using the proposed similarity loss in both super-
vised and semi-supervised learning tasks. Data aug-
mentation works well in practice for fully supervised
problems when big labeled training sets are available.
However, in this work, we show that an additional si-
milarity loss can act as an effective regularizer, which
improves upon data augmentation when little annota-
ted training data is available. The benefit of the pro-
posed similarity loss is not limited to the “toy-like”
rotated MNIST task but extends to more complex ge-
ometric transformations of natural images where even
larger improvements can be obtained.
In addition, another contribution of our work con-
cerns the fact that the proposed similarity loss can
be utilized for semi-supervised learning, where it can
help to exploit additional unlabeled data. The inclu-
sion of the similarity loss in a semi-supervised ladder
network shows particular promise. With our proposed
modification, we further improve over an architecture
which until recently was the state-of-the-art approach
for semi-supervised learning. As the rotated MNIST
dataset has not been commonly used to evaluate semi-
supervised learning architectures we do not claim to
set a new state-of-the-art but consider the ladder net-
work using an additional similarity loss to have highly
competitive performance.
In general, the use of an unsupervised similarity
loss is a surprisingly simple idea which can easily be
integrated into any deep learning model. All it re-
quires is to duplicate the classification stream of the
network and tune the λ hyperparameter. In our ex-
periments, we found the performance to generally be
very robust to the choice of the weight parameter λ.
The similarity loss can be additionally combined with
methods which encode invariances directly into con-
volutional filters (Cohen and Welling, 2016; Worrall
et al., 2017; Zhou et al., 2017) and with architectu-
res which enable neural networks to handle geometric
transformations more easily (Jaderberg et al., 2015;
Dai et al., 2017).
6 CONCLUSIONS
This work proposes an unsupervised similarity loss
which penalizes differences between the predictions
for transformed copies of an input for improved le-
arning of transformation invariance in deep neural
networks on the rotated MNIST and German Traffic
Sign Recognition Benchmark classification tasks. We
show that our similarity loss acts as an effective re-
gularizer, which improves model performance when
little annotated data is available, in both supervised
and semi-supervised learning. Future work could in-
vestigate the application of the proposed similarity
loss on a combination of network layers or an adjus-
tment of the weight parameter λ over the course of
training.
While this work improves the use of data-driven
methods based on augmenting training data for lear-
ning transformation invariance, there still remains a
gap to techniques which encode invariances to trans-
formations directly into the filters of a convolutional
neural network when training on the full set of labels
on rotated MNIST (Cohen and Welling, 2016; Worrall
et al., 2017; Zhou et al., 2017). However, unlike the
proposed similarity loss, which can easily be applied
for a wide variety of transformations, these methods
are currently limited to simple geometric transforma-
tions such as rotations or mirror reflections.
A promising avenue for future research is there-
fore the development of approaches which encode in-
variances to more complex geometric transformations
directly into the architecture of deep neural networks
and combine them with soft constraints as presented
in this paper in order to further improve the data effi-
ciency of deep neural networks.
REFERENCES
Agrawal, P., Carreira, J., and Malik, J. (2015). Learning
to see by moving. In Proc. of the IEEE International
Conf. on Computer Vision (ICCV).
Bruna, J. and Mallat, S. (2013). Invariant scattering convo-
Learning Transformation Invariant Representations with Weak Supervision
71

lution networks. IEEE Trans. on Pattern Analysis and
Machine Intelligence (PAMI), 35(8):1872–1886.
Cohen, T. S. and Welling, M. (2016). Group equivariant
convolutional networks. In Proc. of the International
Conf. on Machine learning (ICML).
Dai, J., Qi, H., Xiong, Y., Li, Y., Zhang, G., Hu, H., and
Wei, Y. (2017). Deformable convolutional networks.
Arxiv tech report.
Doersch, C., Gupta, A., and Efros, A. A. (2015). Unsu-
pervised visual representation learning by context pre-
diction. In Proc. of the IEEE International Conf. on
Computer Vision (ICCV).
Haeusser, P., Mordvintsev, A., and Cremers, D. (2017).
Learning by association - a versatile semi-supervised
training method for neural networks. In Proc. IEEE
Conf. on Computer Vision and Pattern Recognition
(CVPR).
Ioffe, S. and Szegedy, C. (2015). Batch normalization:
Accelerating deep network training by reducing inter-
nal covariate shift. In Proc. of the International Conf.
on Machine learning (ICML).
Jaderberg, M., Simonyan, K., Zisserman, A., and Kavuk-
cuoglu, K. (2015). Spatial transformer networks. In
Advances in Neural Information Processing Systems
(NIPS).
Kingma, D. P. and Ba, J. (2015). Adam: A method for
stochastic optimization. In Proc. of the International
Conf. on Learning Representations (ICLR).
Kivinen, J. J. and Williams, C. K. I. (2011). Transformation
equivariant boltzmann machines.
Krizhevsky, A. (2009). Learning multiple layers of featu-
res from tiny images. Master’s thesis, Department of
Computer Science, University of Toronto.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in Neural Information Pro-
cessing Systems (NIPS).
Laptev, D., Savinov, N., Buhmann, J. M., and Pollefeys, M.
(2016). TI-POOLING: transformation-invariant pool-
ing for feature learning in convolutional neural net-
works. In Proc. IEEE Conf. on Computer Vision and
Pattern Recognition (CVPR).
Larochelle, H., Erhan, D., Courville, A., Bergstra, J., and
Bengio, Y. (2007). An empirical evaluation of deep
architectures on problems with many factors of varia-
tion. In Proc. of the International Conf. on Machine
learning (ICML).
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998).
Gradient-based learning applied to document recogni-
tion. Proc. of the IEEE, 86(11):2278–2324.
Miyato, T., Maeda, S., Koyama, M., Nakae, K., and Ishii,
S. (2016). Distributional smoothing by virtual advers-
arial examples. In Proc. of the International Conf. on
Learning Representations (ICLR).
Noroozi, M. and Favaro, P. (2016). Unsupervised learning
of visual representations by solving jigsaw puzzles.
In Proc. of the European Conf. on Computer Vision
(ECCV).
Oyallon, E. and Mallat, S. (2015). Deep roto-translation
scattering for object classification. In Proc. IEEE
Conf. on Computer Vision and Pattern Recognition
(CVPR).
Rasmus, A., Valpola, H., Honkala, M., Berglund, M., and
Raiko, T. (2015). Semi-supervised learning with lad-
der networks. In Advances in Neural Information Pro-
cessing Systems (NIPS).
Sajjadi, M., Javanmardi, M., and Tasdizen, T. (2016). Regu-
larization with stochastic transformations and pertur-
bations for deep semi-supervised learning. In Advan-
ces in Neural Information Processing Systems (NIPS).
Sifre, L. and Mallat, S. (2013). Rotation, scaling and defor-
mation invariant scattering for texture discrimination.
In Proc. IEEE Conf. on Computer Vision and Pattern
Recognition (CVPR).
Simard, P. Y., Steinkraus, D., and Platt, J. C. (2003). Best
practices for convolutional neural networks applied to
visual document analysis.
Sohn, K. and Lee, H. (2012). Learning invariant represen-
tations with local transformations. In Proc. of the In-
ternational Conf. on Machine learning (ICML).
Springenberg, J. T., Dosovitskiy, A., Brox, T., and Ried-
miller, M. A. (2015). Striving for simplicity: The all
convolutional net. In International Conf. on Learning
Representations (ICLR) (workshop track).
Stallkamp, J., Schlipsing, M., Salmen, J., and Igel, C.
(2012). Man vs. computer: Benchmarking machine
learning algorithms for traffic sign recognition. Neu-
ral Networks, 32:323–332.
Worrall, D. E., Garbin, S. J., Turmukhambetov, D., and
Brostow, G. J. (2017). Harmonic networks: Deep
translation and rotation equivariance. In Proc. IEEE
Conf. on Computer Vision and Pattern Recognition
(CVPR).
Zheng, S., Song, Y., Leung, T., and Goodfellow, I. (2016).
Improving the robustness of deep neural networks via
stability training. In Proc. IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR).
Zhou, Y., Ye, Q., Qiu, Q., and Jiao, J. (2017). Oriented
response networks. In Proc. IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR).
VISAPP 2018 - International Conference on Computer Vision Theory and Applications
72
