
Augmented Reality for Respiratory System using Leap Motion
Controller
U. Andayani
1
, B. Siregar
1
, Abdul Gani
1
, M. F. Syahputra
1
1
Department of Information Technology, Universitas Sumatera Utara, Jl. Alumni No.3, Medan, Indonesia
Keywords: augmented reality, leap motion controller, hand gesture, motion tracking, gesture understanding.
Abstract: Anatomy is a branch of biology. Science applied in the medical field is not easy to learn just by imaging or at
least just using props to know the process directly. The anatomical system is the systemic of the body
especially in the part of the lungs organ while breathing. Therefore, modern technology is used as one of the
learning methods that can help research anatomy of the lung as a main organ in the respiratory system. In this
study, the researchers use the anatomy of Three Dimension (3D) and multimedia animation system that helps
with the Leap Motion Controller tool that supports the movement of fingers and hands as controlling the
system. With this tool, objects with a 3D models on the respiratory system can be handled with gestures from
the hands of both hands of the user. The process resulted in a merger of Augmented Reality systems and the
Leap Motion Controller in which the system produced animated movements and virtual 3D object use marker
which sized 21cmx29, 7cm where the results using best distance while camera detect the marker is 20cm-
45cm, camera can detect the object use the slope distance between 35
0
-145
0
.
1 INTRODUCTION
Anatomy is the study of the structure of the human
body (Paulsen, 2013). This knowledge is applied in
the medical field,based on observations, a professor
of trouble to explain to the students about the
structure of the human body. This is because the
science was likely learned by memorizing through
textbooks but requires a relatively high visualization
capabilities. The solution that has been done by the
teacher is to encourage students into the laboratory to
see the props and adapt to the atlas of the human
anatomy, but the disadvantages are the props can only
be used in the laboratory. In addition, students
experience boredom with lecturers in teaching
methods without using the props. Furthermore, with
the support of an edition and visualization mode
(Edgard, 2010).
Along with the rapid Information Technology
(IT) almost all areas of life wanting everything his
character interesting, so that may be one way to
improve the ability to learn anatomy by using modern
learning system. One of them is to learn anatomy
using 3D technology (Nady, 2014). In addition, as a
means of supporting tools 3D technology can also
improve user interaction so that the anatomy is more
observable in interesting ways.
Augmented reality technology is a 3D technology
to combine computer-generated objects with real-
world environment. Augmented reality enhance the
user perception and interaction with the real world.
Virtual objects indicates that the user information
cannot be seen directly by eyesight. Information
submitted by the virtual object to help the user do the
work in the real world (Kato, 2000). Augmented
reality is an innovation of computer vision that can
provide the visualization and animation of an object
model. It is expected that this technology will help the
faculty in teaching and learning, so that the learning
process becomes more interesting and no student
interaction of the material.
To perform an interactive interaction, the system
must be able to detect and capture the movement of
the object (Giulio, 2014). In this study, the object to
be detected and a search is conducted in the form of
palms. Detection of palms is expected to connect the
real world with the virtual world in a more realistic
reality augmented system.
Leap motion as the controller can improve human
interaction with computers to develop the application
such as for accuracy (Frank, 2013). Leap Motion
Controller is a tool designed to track the movements
of the hand and fingers. At the moment the system is
run, users can perform various activities with hand
gestures. This hand movement was observed by
1900
Andayani, U., Siregar, B., Gani, A. and Syahputra, M.
Augmented Reality for Respiratory System using Leap Motion Controller.
DOI: 10.5220/0010090519001904
In Proceedings of the International Conference of Science, Technology, Engineering, Environmental and Ramification Researches (ICOSTEERR 2018) - Research in Industry 4.0, pages
1900-1904
ISBN: 978-989-758-449-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
sensors on the Leap Motion Controller as input to do
various things that can trigger events in the program.
In a 3D human anatomy, hand gestures will make the
user as if they were interacting directly and in contact
with the 3D model of the human anatomy.
The gesture is a static and dynamic movement that
is used as a means of communication between man
and machine as well as fellow human beings who use
sign. By using hand gestures were observed Leap
Motion Controller to do the control on the system.
Certain gestures may trigger a process on the system.
Position hands doing gestures can be supported for
translational motion 3D Leap Motion Controller.
Anatomy harnessing modern technology has also
been applied as in the Augmented Reality for
Anatomy Study (Naoto, 2016), (Natapon, 2016), and
(Yudhisthira, 2013). Leap Motion Controller is
already widely used in a variety of systems, such as
the system had been developed (Kasey, 2016),
(Masaru, 2013), and (Farhan, 2015).
Based on the above background, the title of this
research is "Augmented Reality Anatomy
Respiratory System Using Leap Motion Controller
For Media Medical Education".
2 CONCEPT DEVELOPMENT
The data used in this study were the marker captured
in real time via the camera phone and using hand
gestures detection leap motion controller. While
capturing the hand movements required marker and
mobile phone cameras, motion controller quality leap
nice, lighting and distance marker making.
The methodology need to analyse the problems of
the information obtained in the preceding stage in
order to obtain a method to overcome the problem in
this study. Then perform the system design according
to the analysis of system problems. The following
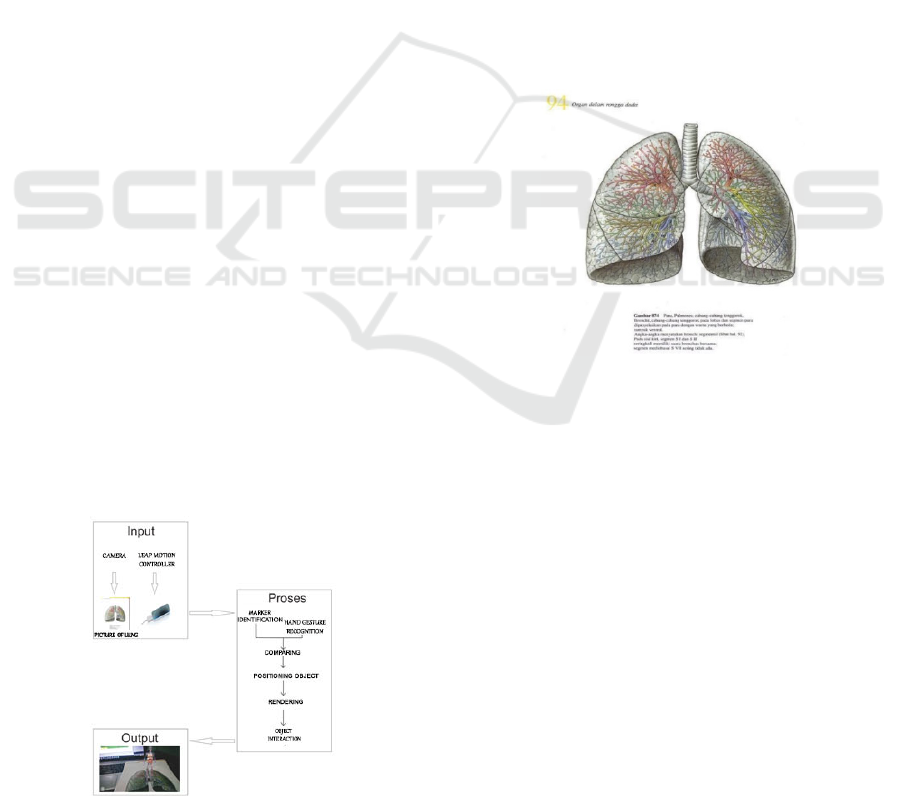
Figure 1 describes the general architecture of the
system design of the study.
Figure 1: General Architecture
3 SYSTEM DESIGN
The research was done by dividing into three
sections: input, process and output.
3.1 Input
Marker was placed in front of the camera to display
3d objects. Leap motion controller is placed under the
hand to control 3D objects.
3.2 Process
3.2.1 Identify Marker
Marker consists of a piece of paper will be detected
by a Mobile camera. The hand and finger movements
above the Leap Motion Controller will be detected by
the Leap Motion Controller tool. Furthermore, both
of them will be reviewed and assigned a 3D
orientation position as a virtual object above the
marker.
Figure 2: Marker
3.2.2 Database
Furthermore, the marker captured by the camera
adjusts the marker image in the database, as well as
the hand gesture, if the corresponding movement
information will continue with the approximate
scaling and placing 3D virtual objects above the
marker.
3.2.3 Positioning Object
The position of the object is related to the X
coordinate (moving the position to the right and left),
Y (moving the position up and down), Z (moving the
position forward and back) on the marker for the
virtual position of 3D objects.
Augmented Reality for Respiratory System using Leap Motion Controller
1901
3.2.4 Rendering
In rendering, all data entered in the modelling
process, animation, texturing, lighting with
parameters will be translated in an output (the final
view on the animation model).
3.2.5 Object Interaction
The 3D objects located above the marker will move
according to the instructions of the hand movement.
3.3 Output
The resulting output is the movement of objects and
animation updates, in accordance with hand gesture
instructions.
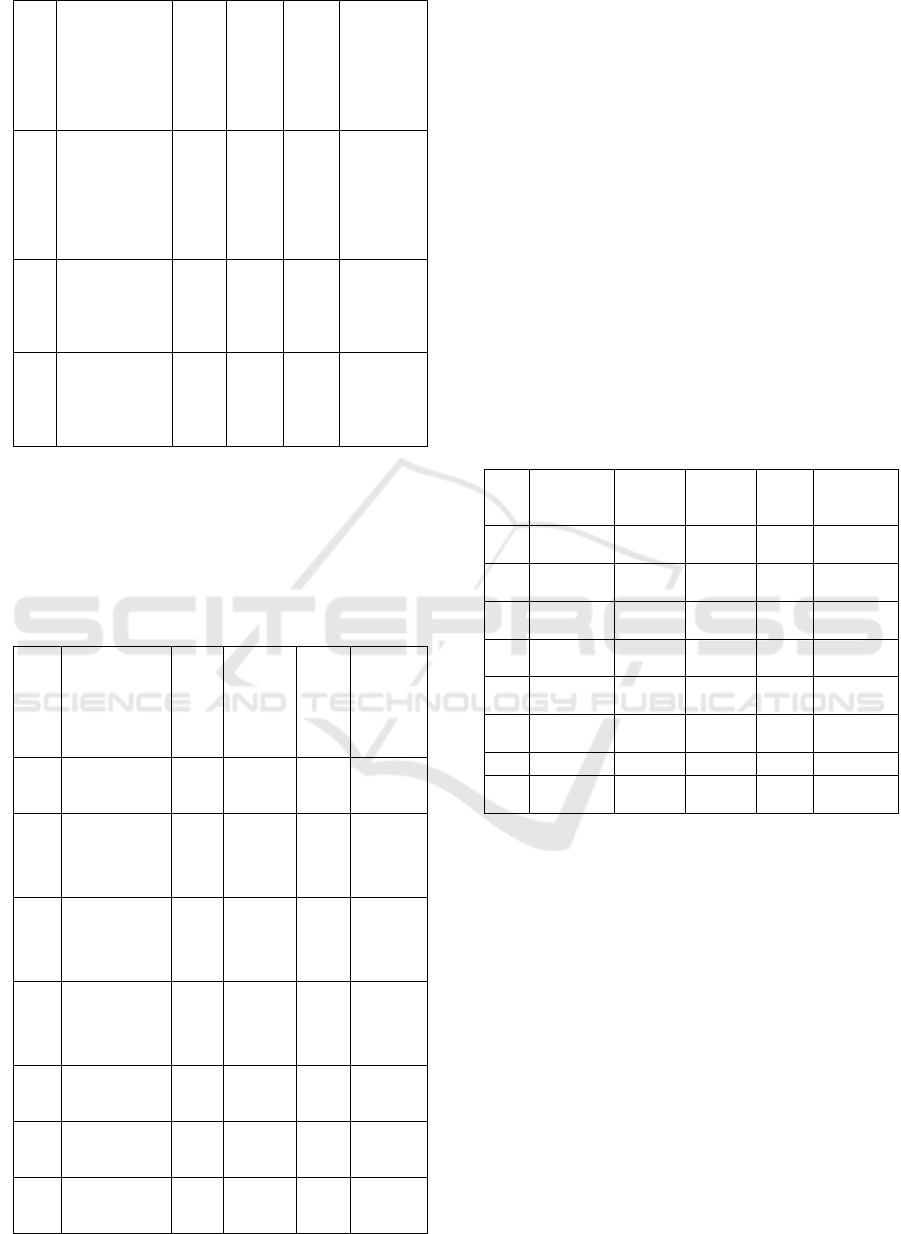
3.4 Hand Gesture using the Leap
Motion
Controlling or running applications using the Leap
Motion Controller device. Leap motion controller
will capture hand movements instructed by the user
that are carried out, are:
1. Hand movements slide right and left to rotate
objects.
2. Hand movements to grasp to stop rotating objects.
3. Hand movements slide down to display oxygen
inhaling animation.
4. Hand movements slide up to display animation
removing CO
2.
5. The hand movement points to display the
displacement of the object's movement of the hand
pointing with the index finger to display the anatomy
of the lung section.
Figure 3: Leap Motion Controller Setting
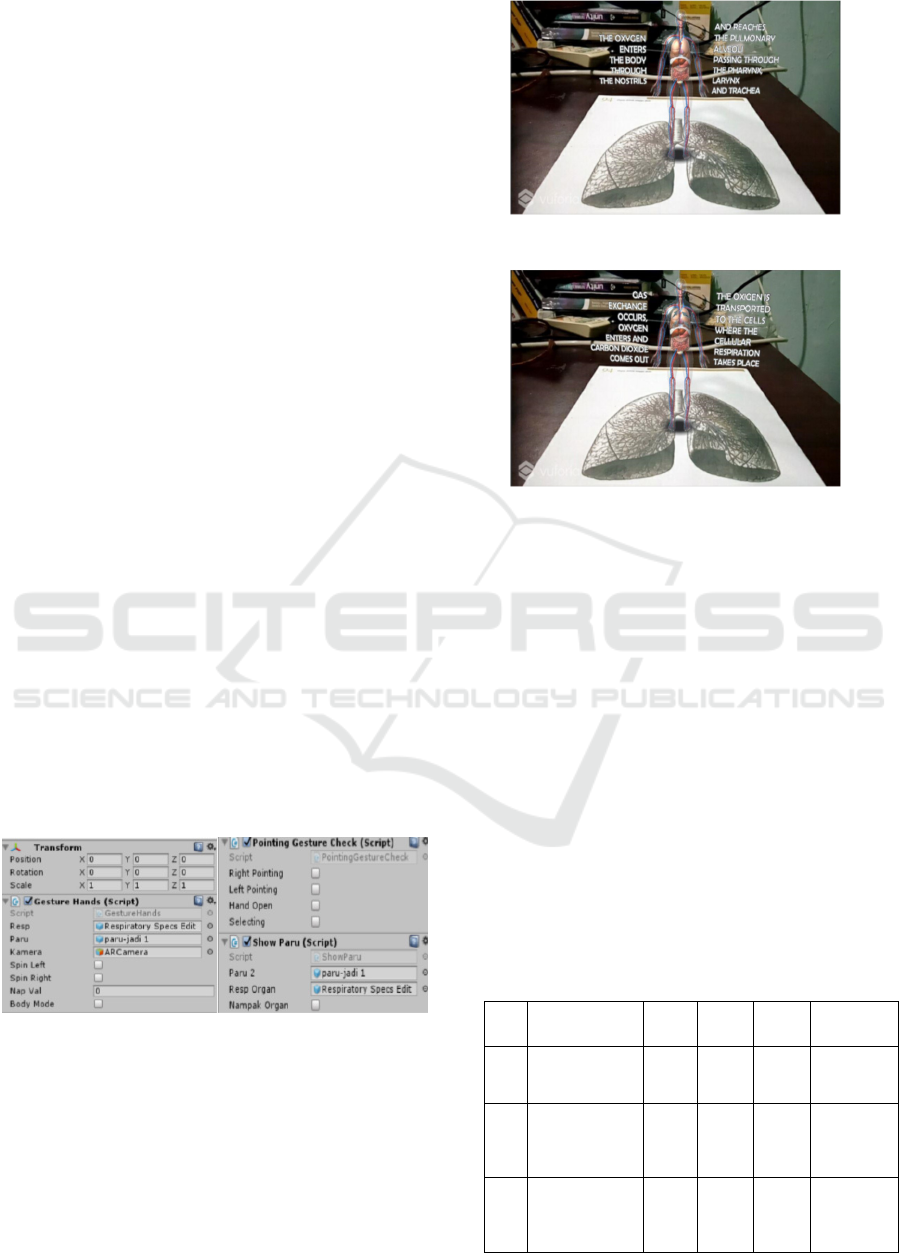
4 RESULT AND DISCUSSION
The following an animation of the lung organs, such
as while breathe oxygen and release CO
2
.
Figure 4: Animation of Breathing Oxygen
Figure 5: Releasing CO2
The purpose of testing system in order to
know the achievement of the system to use the Leap
Motion Controller as a tool for 3D human
anatomyrecognition system. Test divided into 2 (two)
parts.
4.1 Introduction Test of Leap Motion
Controller
The introduction test of Leap Motion Controller is to
know how accurate leap motion detect user gestures.
Testing is done by connecting the leap motion with
laptop with a USB cable. After the Leap Motion will
connect automatically leap motion lamp life and will
detect hand movements. Tests carried out ten times.
In in order to determine accurately degree system in
this study.
Table 1: Leap Motion Controller Scenario Test
No. ScenarioTest Test
Cor
rect
Fals
e
Test
Result
1
Introduction
of Fingers
10 8 2
Detected
and
unstable
2
The
introduction
of the right
hand handhel
d
10
10
0
Detected
and stable
3
The
introduction
of the left
hand handhel
d
10
10
0
Detected
and stable
ICOSTEERR 2018 - International Conference of Science, Technology, Engineering, Environmental and Ramification Researches
1902
4
The
introduction
of horizontal
and vertical
movement of
the hands of
the right hand
10
10
0
Detected
and stable
5
The
introduction
of horizontal
and vertical
movement of
the hand left
han
d
10
10
0
Detected
and stable
6
The
introduction
of the right
hand pointed
objec
t
10 7 3
Detected
and
unstable
7
The
introduction
of the left
hand pointed
objec
t
10 8 2
Detected
and
unstable
From the experiments can be concluded that the
introduction of the hand and finger movements are
detected and everything is run well. Besides testing to
detect hand movements Leap Motion Controller to
light intensity.
Table 2: Leap Motion Controller detect to light intensity
No
.
Light
Intensity(Lux
)
No.
of
Tes
t
Correc
t
Fals
e
Test
Result
1 0 10 0 0
Not
detected
2 43.50 10 3 7
Detected
and
unstable
3 83.68 10 6 4
Detected
and
unstable
4 138 005 10 9 1
Detected
and
unstable
5 141 828 10 10 0
Detected
and stable
6 146.74 10 10 0
Detected
and stable
7 153 294 10 10 0
Detected
and stable
4.2 Augmented Reality Marker Testing
Marker testing was conducted to determine the level
detect marker image. Testing is done by connecting
the camera with a USB cable next mobile camera will
automatically detect the marker image and display the
object. Marker used already registered on the website
next Vuforia markers be inserted into the database of
Unity software. The markersize used for this
application is 21cm x 29.7cm (A4 paper size).
Meanwhile marker testing divided into 2 (two) parts.
4.2.1 Distance Detection
Tests conducted to determine the distance
detector to detect the level of the marker image with
a certain distance. Testing is done how far the camera
to detect the marker.
Table 3: Distance Marker Detection Test
No. Distance
(centimet
res)
No. of
Test
Correct Fals
e
Test
Result
1 15
10 10
0
Detected
and Stable
2 20
10 10
0
Detected
and Stable
3 25
10 10
0
Detected
and Stable
4 30
10 10
0
Detected
and Stable
5 35
10 10
0
Detected
and Stable
6 45
10 10
0
Detected
and Stable
7 50
10
8 2
Unstable
8 55
10
0
10
Not
detected
From the experimental detection distance, there
comes a time marker cannot know in because the
picture is less clear marker captured by the camera so
that the camera can detect and stable when the
distance between 20cm - 45cm.
4.2.2 Slope Distance Detection
Tests conducted to determine the distance detector
detects the level of the marker image with a certain
distance. Testing is done how much tilt the camera to
detect the marker.
Augmented Reality for Respiratory System using Leap Motion Controller
1903

Table 4: Tilt Marker Detection Test
No. Slope
Distance
(
0
)
No.
of
Test
Correct False Test Result
1 0
10
0
10 Not detected
2 25
10
7 3
Detected and
Unstable
3 35
10 10
0
Detected and
Stable
4 75
10 10
0
Detected and
Stable
5 110
10 10
0
Detected and
Stable
6 135
10 10
0
Detected and
Stable
7 145
10 10
0
Detected and
Stable
8 155
10
6 4
Detected and
unstable
9 180
10
0
10 Not detected
From the experimental point of the camera to the
marker, there is a time marker cannot know because
the picture is less clear marker captured by the camera
so that the camera can detect and stable when the
distance between 35
0
- 145
0
.
5 CONCLUSIONS
1. Leap Motion Controller when detect hand
movements in these applications run properly and
perform the movement of 3D animation.
2. The results of the calculation of the average value
of 2,916 where the user agrees that the 3D human
anatomy using Leap Motion Controller is a highly
interactive system.
3. Leap Motion Controller can be used as tools for the
manufacture of human anatomy recognition system,
especially the lungs - lungs with the help of 3D
augmented reality marker measuring 21 cm x 29.7 cm
where the results are best when the camera detect the
distance marker is 20 cm -45 cm, the camera also can
be tilted in marker detection where the best angle
results between 35
0
- 145
0
.
For further research, it is expected the research
that can improve the revision of the Leap Motion
Controller tool. So when in use, the display can be
more in line with the movement of the user's
movement. Conformity users with hand gestures
displayed by the 3D system can help the ease learn
gestures found on the system. In addition, the
detailed matters of anatomy can also be developed
based on the organs function. So the visualization of
human anatomy using Leap Motion Controller can
be more detailed.
ACKNOWLEDGEMENTS
This research was supported by Universitas Sumatera
Utara. All the faculty, staff members and laboratory
technicians of Information Technology Department,
whose services turned my research a success.
REFERENCES
EdgardLamounier, Jr., Bucioli, A., Cardoso, A.,
Andrade, A., Soares, A., 2010. On the Use o
f
A
ugmented Reality Techniques in Learning and
Inter
p
retation o
f
Data Cardiolo
g
ic.
Weichert, F., Bachmann, D.,Rudak, B.,Fisseler,
D.,2013.
A
nalysis of the Accuracy and Robustness
of the Leap Motion Controller. Sensors, 13(5), 6380
6393; doi:10.3390/s130506380.
Marin, G.,Dominio, F.,Zanuttigh, P.,2014. Hand
g
esture recognition with leap motion and kinect
devices. IEEE International Conference on Image
Processing (ICIP). ISBN: 978-1-4799-5751-4.
DOI: 10.1109/ICIP.2014.7025313.
Kato, H.,Billinghurst, M., Poupyrev, I.,Imamoto, K.,
Tachibana, K., 2000.Virtual Object Manipulation
on a Table-To
p
AR Environment.
Carlson, K. J., Gagnon, D. J., 2016.
A
ugmented Reality
simulation Integrated Education in Health Care.
12, 123-127.
Okada, M.,Soga, M., Kawagoe, T., Taki, H., 2013.
Development of A Skill Learning Environment for
Posture and Motion with Bone Life-
s
ize models
usin
g
Au
g
mented Realit
y
.
Hoyek, N., Collet, C.,Rienzo, F, D., Almeida, M, D.,
Guillot, A.,2014. Effectiveness of three‐
dimensional digital animation in teaching human
anatom
y
in an authentic classroom context.
Ienaga, N., Bork, F.,Meerits, S., Mori, S.,Fallavollita,
P.,Navab, N., Saito, H., 2016. First Deployment o
f
Diminished Reality for Anatomy Education.
Pantuwong, N.,2016.
A
tangible interfaces for 3D
character animation using augmented reality
technolo
gy
.
Paulsen, F.,Waschke, J., 2013.Sobotta Atlas of Human
Anatomy: General Anatomy and Musculoskeletal.
Translators: Brahm U. Publisher. Jakarta: EGC.
Buana, Y, C.,P, Fendi Aji, 2013.
A
ugmented Reality
For Anatomy Study With Speech Recognition,
Universitas Sebelas Maret.
Luthfi, F.,2015.
AnatomiManusiaBerdimensiTigaMenggunakan
L
eap Motion Controlle
r
.
ICOSTEERR 2018 - International Conference of Science, Technology, Engineering, Environmental and Ramification Researches
1904
