Usability Assessment of Drone Technology With Regard to
Land Border Security
Stefan Hristozov
1
and Boris Shishkov
2,3
1
Institute of Systems Engineering and Robotics, Bulgarian Academy of Sciences, 1113 Sofia, Bulgaria
2
Institute of Mathematics and Informatics, Bulgarian Academy of Sciences, 1113 Sofia, Bulgaria
3
IICREST, 53 Iv. Susanin Str., 1618 Sofia, Bulgaria
Keywords: Usability, Drone Technology, Land Border Security.
Abstract: Some years ago, it would have been amazing to see a drone flying and behaving ‘on its own’, not knowing
whether it is distantly navigated by a human or it is somehow autonomic. Currently we observe that: (i)
Youngsters can easily buy toy drones and navigate them distantly; (ii) Military drones realize sophisticated
operations in dangerous environments. This indicates for impressive advances in the technologies underlying
drone developments, and that is all about ICT – Information and Communication Technology: current ICT is
often embedded in services and/or devices. It is ICT that brings together hardware, software, and net-ware
features, to enable useful solutions in different domains, such as aviation. As it concerns particularly drones,
they represent complex devices comprising mechanical and ICT ‘components’. Current drones can be piloted
remotely. Further, being equipped with video cameras, they can provide fast access to images (and/or real-
time videos) from a range of locations. Finally, advanced solar power supplies make it possible for drones to
stay up for a very long time. Hence, this all makes current drone technology societally relevant. At the same
time, many questions have not yet been answered (even though technology developed) – several of those
questions are: Is current drone technology indeed reliable if used in critical (rescue) operations? How is the
human navigating a drone responsible for what the drone would do? Who is responsible in the case of
autonomic drones? Are current software platforms running on drones powerful enough to cover all possible
situations that may pop up in the sky? To answer those and other related questions, it is necessary to ‘step in
the shoes’ of a particular application domain since those issues are domain-specific – an answer concerning
one domain is not necessarily valid for another domain. Hence, inspired by another paper in the current
proceedings, we focus on land border security. We therefore aim at studying the usability of drone technology,
with regard to the mentioned domain. For this reason, we firstly discuss drone technology in general and then
we analyze its usability in land border security. This analysis is a contribution of the current position paper
and inspiration for further research featuring the development of advanced context-aware drone platforms.
1 INTRODUCTION
Some years ago, it would have been amazing to see a
drone flying and behaving ‘on its own’, not knowing
whether it is distantly navigated by a human or it is
somehow autonomic. Currently we observe that: (i)
Youngsters can easily buy toy drones and navigate
them distantly; (ii) Military drones realize
sophisticated operations in dangerous environments
(IoTDI, 2017). This indicates for impressive
advances in the technologies underlying drone
developments, and that is all about ICT – Information
and Communication Technology: current ICT is often
embedded in services and/or devices
(AWARENESS, 2008). It is ICT that brings together
hardware, software, and net-ware features, to enable
useful solutions in different domains, such as
aviation. As it concerns particularly drones, they
represent complex devices comprising mechanical
and ICT ‘components’. Current drones can be piloted
remotely. Further, being equipped with video
cameras, they can provide fast access to images
(and/or real-time videos) from a range of locations.
Finally, advanced solar power facilities make it
possible for drones to stay up for a very long time
(Gavrailov, 2014). Hence, this all makes current
drone technology societally relevant. At the same
time, we argue that many questions have not yet been
answered (even though technology has developed) –
several of those questions are: Is current drone
216
technology indeed reliable if used in critical (rescue)
operations? How is the human navigating a drone
responsible for what the drone would do? Who is
responsible in the case of autonomic drones? Are
current software platforms running on drones
powerful enough to cover all possible situations that
may pop up in the sky? To answer those and other
related questions, it is necessary to ‘step in the shoes’
of a particular application domain since those issues
are domain-specific – an answer concerning one
domain is not necessarily valid also for another
domain (IoTDI, 2017). Hence, inspired by another
paper published in the current proceedings (Shishkov
et al., 2017), we focus particularly on land border
security (FRONTEX, 2017). We therefore aim at
studying the usability of drone technology, with
regard to the mentioned domain. For this reason, we
firstly discuss drone technology in general and then
we analyze its usability in land border security. This
represents the contribution of the current position
paper and an inspiration for further research featuring
the development of advanced context-aware drone
platforms.
As for current drones, they are unmanned aircraft
often operated distantly (but it is also possible that
drones are to some extent autonomic), as mentioned
before. Drones come in different sizes and shapes –
from microUAVs that can be held in the palm of one’s
hand to large airships that rival the size of traditional
piloted craft (Gavrailov, 2014). As already
mentioned, drones are empowered by mechanical,
software, hardware, and net-ware components, and
are designed to: primarily collect data (in the context
of diverse tasks), trigger some actuators, and so on.
Depending on their main function, drones can be
designed based on different aircraft styles, such as:
fixed wing, rotary-wing, tilt-rotor, ducted fan, and so
on. Drones may be piloted remotely (as mentioned
already) and are often equipped with video cameras.
Drones are partially used in military operations,
rescue actions, and so on. Nevertheless, there is
insufficient justification to date on the real value and
reliability of drone technology, for example, in the
area of security (Drent at al., 2014).
For this reason, the usability analysis presented in
the current paper, is considered actual.
The remaining of the paper is organized as
follows: We firstly introduce and discuss drone
technology, taking a black-box perspective towards
drones: stressing on the functionality of drones with
respect to their environment (Section 2) and then
taking a white-box perspective with regard to a drone,
analyzing its internal components, processes, and
rules (Section 3). Then, in Section 4, we analyze the
usability of drone technology especially in land
border security, featuring particular relevant strengths
of this technology. Finally, we present the
conclusions in Section 5.
As for Section 2 and Section 3, they are backed by
the following references:
• Adams and Friedland, 2011;
• American Red Cross, 2015;
• Bravo and Leiras, 2015;
• Drent et al., 2014;
• European Emergency Number Association 2015;
• Gavrailov, 2014;
• Guerra and McNerney, 2015;
• ICARUS, 2012;
• Lachar and Maroney, 2012;
• OCHA - UN, 2014;
• SenseFly, 2016;
• Tanzi et al., 2016.
2 DRONE-TECHNOLOGY
In introducing and discussing drone technology, we
start from a more abstract view and move to a more
concrete view. This we do in order to keep good
traceability to concepts, such that comparison with
and/or alignment to other technologies is possible.
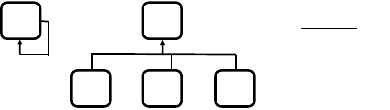
2.1 Conceptual View
Essentially, drones are devices themselves and in
order to be able to function, they need distant
command and satellite navigation. Hence, there are
interactions: (i) between a ground control station and
a drone; (ii) between a drone and a satellite. This
points to a conceptual entity-to-entity model featuring
collaborations with three types of entities, namely:
drone, satellite, and ground control station, as
illustrated in Figure 1:
E
Legend:
E: Entity
D: Drone
S: Satellite
C: ground Control
station
S D C
E
Figure 1: Drone technology – conceptual model.
As it is seen from the figure (left), there are entity
types and one entity can interact with another entity;
as it is also seen from the figure (right), there are three
entity sub-types, namely: DRONE, SATELLITE, and
GROUND CONTROL STATION. This is a
simplified view on drone technology and
Usability Assessment of Drone Technology With Regard to Land Border Security
217
performance; still, since only essential concepts are
reflected in the presented model, it is possible to add
further elaborations, staying considtent with it.
In the following sub-section, we will take a
technology-specific view on the above.
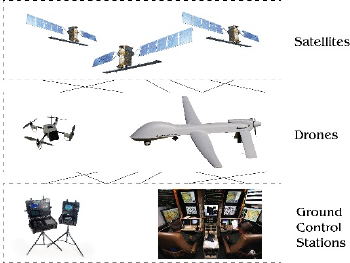
2.2 Technology-Specific View
Even though the technology-specific view on drone
functioning is to be consistent with the conceptual
view, there are more technical and operational details
that are to be considered in such a technology
perspective. A partial technology-specific view on
drone functioning is depicted in Figure 2:
Figure 2: Drone technology – technical view.
As it is seen from the figure and as also suggested
by the conceptual model: there are three layers,
namely ground control stations (‘stations’, for short),
drones, and satellites. Further, drones are capable of
operating (flying) with certain autonomy;
nevertheless, there is always human decision-making
and responsibility behind – this is conveyed through
the stations (there is a bi-directional communication
between the station and the drone: the drone receiving
instructions (commands) from the station and the
station receiving (processed) information from the
drone). Still, the commands delivered from the station
are not enough for allowing the drone to operate
adequately since for this the drone would need precise
navigation – this is provided through corresponding
(GNSS) satellites; satellites are also used sometimes
for facilitating the communication between the drone
and the station (or the communication with third
parties). With regard to this, the following
technologies are important as relevant to the
operation of drones:
• Data-link (up-link and down-link of data in real-
time) – in order for this to be secure and protected
against jamming, encryption is needed;
• The aircraft proximity warning “Sense and
Avoid” systems;
- This including approved automatic detection
and avoidance equipment to be used as a
mitigation means in case the drone-pilot
cannot avoid C2-linkloss during Extended
Visual Line of Sight (EVLOS) and Beyond
Visual Line of Sight (BVLOS);
• Automatic flight control systems (and guidance);
• Navigation equipment (Inertial/GPS);
• Redundancy in critical location tracking systems
such as GPS and location reporting systems;
• Sensor technology, such as Weather Sensors, for
example, installed depending on the weight
category of the particular drone.
Since functionally, two issues are essential when
‘using’ a drone, namely: (i) its collecting data from
the environment; (ii) its streaming back data to the
station, the payload concept is important – it is about
determining the type of data the drone can collectit;
streaming back data is important as well and this is
done via the C2 (Communication and Control) link.
All this concerns sensor technology and data-
streaming technology. The products diversity related
to the mentioned technologies justifies the design of
various drones, in terms of size and weight (including
very small ones).
As mentioned already, those issues (and other
related issues, such as the quality and the
requirements for the sensor pack) are domain-
specific.
2.3 Classification of Drone Platforms
There are different drones for a wide range of
applications with different sizes. Drones can be
classified in many ways: Use (civil vs military), Lift
(fixed-wing vs multi-rotors), MTOW (maximum
take-off weight), and so on. For a conceptual
approach, a good way is to look at drone’s
performance, so it becomes easier to understand the
underlying capabilities. We claim that drones could
be usefully classified based on their size and payload
since those are essential features from a functional
point of view. For this reason, we are considering a
US classification that reflects those features:
• Hand-launched, lightweight, low payload, multi-
rotor drones, weighing less than 25 kg and flying
at altitudes under 300 m. – they can handle
localized imaging and be used for mapping with
light payload;
• Long endurance reconnaissance and surveillance,
fixed wing drones, weighing between 21 kg. and
Seventh International Symposium on Business Modeling and Software Design
218

50 kg., and flying at altitude under 3500 m. above
ground level AGL - they can handle wide-area
imaging and be used for mapping with light
payload;
• Long endurance, large payload drones, weighing
up to 1320 kg. and flying at altitudes under 8000
m. mean sea level MSL - they can handle
localized imaging and be used for mapping with
heavy payload;
• Heavy lift helicopter drones, often weighing more
than 1320 kg. – they can be used for transportation
of people and fly to remote locations;
• Long endurance, high altitude reconnaissance and
surveillance drones, weighing more than 1320 kg.
and having approximately the same size (and
similar capabilities) as traditional manned aircraft
– they can be used for wide-area searches.
All those platform choices concern corresponding
platform characteristics and application needs, and
often considering the trade-offs between the two is
necessary, as depicted in Figure 3:
Figure 3: Trade-off between platforms and applications.
3 MAKING DRONES
OPERATIONAL
Based on the functional (black-box) view on drone
technology, as outlined in the previous section, we are
presenting in the current section an operational
(white-box) view on that, staying mainly focused on
the payload aspects (that concern data capturing) and
the software driving the drone, while abstracting from
other engineering concerns, such as mechanics,
motor, energy consumption, and so on.
Still in addressing payload and software, we are
to keep in mind the particular drone mission that in
turn relates to the aerial drone platform of choice. As
an example: Fixed-wing platforms would be
appropriate for scanning vast areas and/or for
realizing long range flights, while rotor-drone
platforms would be appropriate when situation-
awareness is needed, featuring small areas and/or a
specific target. Hence, taking this into account, we
consider in the remaining of the current section
payload and software as essential with regard to the
operation of a drone.
3.1 Payload
While platforms dictate the drone’s ability to access
certain environments, its payload often determines
the type of data it can collect. Remote sensors like
Electro-Optical (EO) and Infrared (IR) (EO/IR)
cameras can help establishing situation-awareness
while communications relay payloads can be used to
broadcast wireless frequencies wherever the drone
travels. Other sensors are used in scanning the ground
nevertheless – those are called Mapping (M) Sensors.
In the remaining of this sub-section, we briefly
consider EO/IR sensors and M sensors.
1. EO/IR sensors are the workhorses of drone-
based sensing technology. These sensors provide
the most commonly used data collected from
drone platforms. We can consider in particular:
• EO Sensors, mainly used for day operations;
those sensors are relatively cheap and widely
available; they include video cameras and
high-definition photography equipment.
• IR Sensors are excellent for night operations;
those sensors detect the heat signatures of
various objects; this is particularly useful for
locating intruders at night and in large, open
environments.
• Dual EO/IR Sensors (combined into a dual
package) can be used for both day and night
operations.
2. M sensors scan the ground and create 2D or 3D
maps of the surrounding area. Much drone-based
mapping is currently geo-referenced, allowing it
to be easily transposed onto existing geographical
information systems (GIS):
• LiDAR: capable of creating highly detailed
topographical maps and 3D maps of border
areas, useful in specifying maps of high
precision.
• Synthetic Aperture Radar (SAR): capable of
providing detailed imagery of the ground day
or night through cloud, fog, and smoke; also
capable of detecting metal and other material.
Further, we consider communication relay payloads
that allow drones to act as mobile communication
stations, beaming Wi-Fi Internet, cellular service,
radio, and other important signals to security
personnel.
Hence, given their ability to quickly reach high
altitudes (and hover in place for a prolonged perios –
this is particularly valid for rotary-wing drone
platforms), drones provide ideal stopgap solutions
when communication infrastructure is unavailable.
Usability Assessment of Drone Technology With Regard to Land Border Security
219
3.2 Software
Drones need to be paired with sophisticated software
– this is to improve the (data) link between the drone
and its operator, but also to facilitate the streamline
sharing of drone-collected data with other
stakeholders. Such data can be utilized by mapping
software products featuring maps and GIS –
Geographic information Systems.
As for the requirements that concern drone
software, they would inevitably relate to the typical
drone environment – often aligned with military
structures. This assumes considering three layers as
follows:
• The bottom (executive) layer concerns the flight
management and navigation. Therefore, the
corresponding software support would be
responsible for maintaining a controlled flight,
often performed by an on-board autopilot. To this
layer we can add also payload control systems
harvesting data from the environment, such as
sensors and radars.
• The tactical layer concerns the station (see Figure
2) where all the information about position,
heading, speed etc. is ‘crunched’ with the mission
important information from the payload and all is
presented on the displays of the operators.
• The top (strategic) layer receives full real-time
picture from all deployed drones and available
infrastructure, for the superiors in order to make
proper decisions.
4 USABILITY IN BORDER
SECURITY
We refer to an application scenario featuring land
border security (LBS, 2012), which is considered in
another paper from the current proceedings (Shishkov
et al., 2017). The scenario reflects the security
protection of a land border segment equipped with
wired border fence. There is no border crossing point
in the considered area; this means that the security
goal is to prevent any border crossings. Still, even
though such a border segment could be secured
professionally, it is physically impossible for border
police officers to be anytime anywhere to react upon
violations, if counting on traditional equipment
(Shishkov and Mitrakos, 2016).
This leads to several important DEMANDS
whose consideration would bring in useful results:
1. Effective monitoring of the large area around the
wired fence, limited not only to the very close
proximity to the fence itself;
2. Situation analysis capturing both problematic
spots (for example: a crowd passing illegally) and
available resources (for example: border police
officers and vehicles);
3. Rescuing a border police officer (or another
person) in trouble (for example: because of
weather conditions).
Hence, those identified demands are basis for our
analyzing the relevant strengths of drone technology.
In this regard, drones are claimed to present an
attractive proposition mainly due to their providing
unique viewing angles at low altitudes, something
impossible to be achieved either by manned aircraft
or by fixed cameras. For example, drones, flying over
a border fence, are in a position to view much more
that a fixed camera can, and cover a much vaster area
than a human can physically cover while patrolling.
Further, drone technology is highly deployable.
Drones, particularly small models, can be launched in
a variety of environments without the need for a
runway – this makes drone technology useful at the
border where terrains are often difficult to handle.
Therefore, we consider drone technology as
having good potential to usefully support border
security. At the same time, we observe the need for
corresponding control because as it was discussed
already, drones may be autonomic to some extent
and/or they may be navigated from distance – both
cases assume risk of situational mis-interpretaion, in
our view. Hence, establishing control should mainly
be about the adequacy of task formulations and the
validity of situation perception. On such a basis and
taking into account the capabilities of the particular
drone, it would be possible to actually involve
drone(s) in particular operations at the border.
If this would be successful, then drones could
indeed releave officers from some of their most
dangerous duties (for example: rescuing a border
police officer or another person who is in trouble). In
this, a drone (representing an unmanned device)
would deliver specific types of actions that can
contribute to a smart and better decision making
process, especially as it concerns disaster
management (also in the border security context):
• Informer: A drone would often be capable of
geting more information from the accident spotm
which in turn would allow for a smart decision-
making to be delivered accordingly.
• Helper: In some situations, a drone would be
capable of delivering medication(s) and/or
equipment needed in approaching an accident.
Finally, such solutions, if delivered through drones,
would be cost-efficient, especially if compared to
Seventh International Symposium on Business Modeling and Software Design
220
man-run helicopter actions. Also, a drone could do
times more as monitoring, compared to what fixed
cameras and physical persons could accomplish.
At the same time, there are particular limitations
of drone-driven solutions, such as the risk of mis-
interpretation of visual information as well as the
flight risks in situations of strong wind / turbulence
and or icing.
Summarizing the Strengths of Drone Technology
Based on our considering drone technology in Section
2 and Section 3, and inspired by the border security
demands and related discussion (see above), we
summarize the strengths of drone technology,
particularly with regard to land border security. In
doing this, we take into account that border protection
uses a series of strategies, some more effective than
others, to monitor huge strips of (rugged) terrain
along the border: In some situations, it is needed to
involve more border police officers in the protection
of the border; In other situations, it would be enough
to just better maintain and reinforce the fences (if
any), barriers, access roads, and so on; In yet other
situations, the deployment of specialized technology
would be considered necessary, such that advanced
monitoring can be realized (this may include high
towers or radar, camera equipment, and so on) (LBS,
2012).
Hence, we identify strengths of drone technology,
especially related to the monitoring challenge.
Currently, fixed towers are used, which include radar
as well as day and night cameras (mounted on a series
of towers along the border). The radar and cameras
transmit data to the border control center, where
border police officers determine an appropriate
course of action accordingly. Nevertheless, the
limitations of such fixed static equipment are
obvious. A wisely chosen drone platform can meet
targetted demands in this regard, providing also
augmentation of the existing systems via data
transfer, surveillance, agility and additional
flexibility over the mentioned static technologies (a
surveillance would be much more effective from an
aerial point of view); this would relieve personnel
from missions, as well.
Further, drones can step into aviation shoes
concerning aviation services for border
surveillance and goods delivery, due to
cost effectiveness. With regard to surveillance,
drones are capable of carrying platforms for radar and
long-distance cameras. With regard to goods,
delivery, it is possible, depending on the drone
platform of choice and corresponding weight
limitations (initial testings of such deliveries have
already been completed and there is an ongoing
certification for them).
5 CONCLUSIONS
Aerial drones feature promising new technological
solutions relevant to many aspects of our lives,
security included (and in particular – land border
security). At the land border, drones are capable of
complementing traditional manned activities (such as
patrolling, monitoring, conducting rescue operations,
and so on), by helping to ensure that those activities
are conducted safer, faster, and more efficiently. In
particular:
• Drones are capable of providing a border police
officer with situation-awareness – they can help
locate intruders, perform structural analysis of
damaged facilities (for example: a border fence
facility) over large distances, and deliver needed
supplies and equipment.
• Drones are capable of assisting with mapping and
corresponding planning.
• Drones are capable of approaching dangerous
zones where the safety of border police officers
would be endangered.
Still, we claim that drones would be capable of being
so useful only if drone roles and tasks are adequately
specified not only from the engineering perspective
but also from the domain perspective:
• Engineers should make sure that the user
requirements are realistic with regard to the
technical possibilities and related limitations of
the drone platform of choice;
• Security experts should make sure that the tasks
assigned to drones are complementing (rather
than conflicting) with regard to the tasks fulfilled
by border police officers and also that
corresponding performance indicators are used,
such that the information captured (by drones) as
well as its interpretation are justified.
Those are the conclusions drawn in the current
position paper in which we have analyzed the
usability of drone technology with regard to a
particular application domain (namely: land border
security), inspired by a high-level study of drone
technology and the consideration of the mentioned
domain and a related application scenario.
A limitation of our work is that it is too high-level
and insufficiently concrete as it concerns enterprise /
software specifications (Shishkov, 2017) related to
the enabling of drone usage at the land border. This
will be the main focus of our further research.
Usability Assessment of Drone Technology With Regard to Land Border Security
221
REFERENCES
Adams, S., Friedland, C., 2011. A Survey of Unmanned
Aerial Vehicle (UAV) Usage for Imagery Collection in
Disaster Research and Management. Louisiana State
University, USA (Technical Report).
American Red Cross, 2015. Drones for Disaster Response
Relief Operations Study. American Red Cross, USA.
AWARENESS, 2008. Freeband AWARENESS Project.
http://www.freeband.nl.
Bravo R., Leiras A., 2015. Literature Review of the
Application of UAVs in Humanitarian Relief. In XXXV
Encontro Nacional de Engenharia de Producao.
Drent, M., Landman, L., Zandee, D., 2014. The EU as a
Security Provider. Clingendael Report of the
Nederlands Institute for International Relations.
European Emergency Number Association, 2015. Remote
Piloted Airborne Systems (RPAS) and the Emergency
Services. European Emergency Number Association,
Belgium.
FRONTEX, 2017, the website on the European Agency,
FRONTEX: http://frontex.europa.eu.
Gavrailov, A., 2014. Global Commercial and Civil UAV
Market Guide. Published by INEA Consulting, UK.
Guerra, S., McNerney, M., 2015. Air National Guard
Remotely Piloted Aircraft and Domestic Missions,
Opportunities and Challenges. Published by the RAND
Corporation, USA.
ICARUS, 2012. FP7 EU Project on Integrated Components
for Assisted Rescue and Unmanned Search Operations:
http://www.fp7-icarus.eu.
IoTDI, 2017. 2
nd
International Conference on Internet-of-
Things Design and Implementation. ACM/IEEE.
Lacher, A., Maroney, D., 2012. A New Paradigm for Small
UAS. Published by the MITRE Corporation, USA.
LBS, 2012. LandBorderSurveillance, the EBF,
LandBorderSurveillance Project: http://ec.europa.eu.
OCHA – UN, 2014. Unmanned Aerial Vehicles in
Humanitarian Response. Report in the OCHA Policy
and Studies Series, United Nations Office for the
Coordination of Humanitarian Affairs.
SenseFly, 2016. Robots to the Rescue – Researching How
Drones Can Help Save Lives. Report to the European
Commission.
Shishkov, B., 2017. Enterprise Information Systems, A
Modeling Approach, IICREST. Sofia, 1
st
edition.
Shishkov, B., Janssen, M., Yin, Y., 2017. Towards Context-
Aware and Privacy-Sensitive Systems. In BMSD’17, 7
th
International Symposium on Business Modeling and
Software Design. SCITEPRESS.
Shishkov, B., Mitrakos, D., 2016. Towards Context-Aware
Border Security Control. In BMSD’16, 6
th
International
Symposium on Business Modeling and Software
Design. SCITEPRESS.
Tanzi, T., Chandra, M., Isnard, J., Camara, D., Sebastien,
O., Harivelo, F., 2016. Towards "Drone-Borne"
Disaster Management: Future Application Scenarios.
In ISPRS Annals of Photogrammetry, Remote Sensing
and Spatial Information Sciences, Volume III,
COPERNICUS, Germany.
Seventh International Symposium on Business Modeling and Software Design
222
