
Fault Estimation using a Takagi-Sugeno Interval Observer: Application
to a PEM Fuel Cell
C. Mart
´
ınez Garc
´
ıa
1
, V. Puig
2
and C. Astorga Zaragoza
1
1
Centro Nacional de Investigaci
´
on y Desarrollo Tecnol
´
ogico, Cuernavaca, Morelos, Mexico
2
Universitat Polit
´
ecnica de Catalunya, Departament of Automatic Control, Rambla de Sant Nebridi 10, Terrassa, Spain
Keywords:
Takagi-Sugeno System, Interval Observer, Fault Estimation, PEM Fuel Cell.
Abstract:
Fault estimation plays an important role in the fault diagnosis system since provides information about the fault
magnitude and temporal evolution. In this paper, we present an approach that allows to obtain a simultaneous
estimation of the fault, state and associated uncertainty intervals of a uncertain Takagi-Sugeno (TS) system.
The fault estimation is obtained using a TS interval observer augmenting the system state with the fault and
considering the system uncertainty in a bounded context. A set of Linear Matrix Inequalities (LMIs) have
been derived to design the TS interval observer. With the purpose of illustrating the performance of TS
interval observer for fault and state estimation, a case study based on a Proton Exchange Membrane (PEM)
fuel cell is used.
1 INTRODUCTION
Fault diagnosis involves the fault detection and iso-
lation but also the fault estimation. The fault de-
tection and isolation tasks determine the fault pres-
ence in the system (Zhang and Jiang, 2008) (Hwang
et al., 2010) (Samy et al., 2011), but not the mag-
nitude. The goal of fault estimation is to provide
the size of the fault and its time evolution (Blanke
et al., 2006). The fault estimation task is very im-
portant for several applications, especially when an
active fault-tolerant control (FTC) strategy is imple-
mented (Mahmoud et al., 2003) (Noura et al., 2009)
(Witczak, 2014). An example of the application of
the fault estimation is to determine the size of the
leaks in a pipe system with the aim of quantifying
the losses (Brune and F, 2001). There are several ap-
proaches for addressing the problem of diagnosis of
non-linear systems (Witczak, 2007). In this paper, we
can consider that the non-linear model of the system
to be monitored can be represented by Takagi-Sugeno
(TS) model. TS models were introduced by (Takagi
and Sugeno, 1985), and allow describing a nonlin-
ear system as the interpolation of linear models by
means of membership functions, that come from a set
of fuzzy rules. Different observer design techniques
have been developed for TS systems (Guerra et al.,
2015) (Aouaouda et al., 2014) (Ichalal et al., 2010)
(Zhang et al., 2009).
The presence of uncertainties (unknown parame-
ters, disturbances and/or noise) in the system, compli-
cates the estimation using standard (non-robust) ob-
servers. Interval observers can be used to take into
account the uncertainty using the set-membership ap-
proach (Puig, 2010). The interval observer consid-
ers the disturbances, noise and model parameters in
a bounded way, evaluating the set of admissible val-
ues (interval) for the state vector of each time instant
(Efimov et al., 2013b). So far, interval observers have
been proposed for the state estimation (Efimov et al.,
2013b) and fault detection of nonlinear and LPV sys-
tems (Efimov et al., 2013a). As explained in (Rassi
et al., 2010), the general idea is to build two ob-
servers, which respectively estimate the lower and up-
per bound of the state vector assuming the system is
cooperative. As the original nonlinear system is not
cooperative, the observer gain is designed such that
the observation error dynamics becomes cooperative.
The inclusion of uncertainty in the model parameters
in case of an interval observer allows robust fault de-
tection. In (Rotondo et al., 2016), this idea has been
used for the fault diagnosis of proton exchange mem-
brane (PEM) fuel cells using a TS interval observer
approach. The TS interval observer design is used for
the state estimation of TS uncertain systems. Fault
diagnosis is addressed using a bank observers where
each observer can be made sensitive to different sub-
set of faults.
García, C., Puig, V. and Zaragoza, C.
Fault Estimation using a Takagi-Sugeno Interval Observer: Application to a PEM Fuel Cell.
DOI: 10.5220/0006431206130620
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 613-620
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
613

The novelty of this paper is to present a fault esti-
mation scheme based on a TS interval observer. This
estimator obtain the simultaneous state and fault esti-
mation without making use of the fault detection and
isolation modules. Moreover, an interval of the fault
magnitude is provided which has not yet been pro-
posed for fault estimation in TS systems. The design
of the TS interval observer is addressed with the Lya-
punov approach leading to a set of LMIs, that can be
efficiently solved using available solvers as YALMIP
(L
¨
ofberg, 2004). The performance of the TS interval
observer for the fault and state estimation is assessed
using a case study based on a proton exchange mem-
brane (PEM) fuel cell.
The structure of the paper is the following: In the
Section 2, the uncertain TS system is presented. In
the Section 3, the formulation of the interval observer
design is presented. The proposed PEM fuel cell case
study is presented in Section 4, while the results of the
application of the proposed approach are presented.
Finally, Section 5 presents conclusions of this work.
2 PROBLEM SETUP
2.1 Takagi-Sugeno Uncertain Model
The uncertain TS model of the system to be monitored
is expressed in discrete-time including parametric un-
certainty as follows:
Rule i : If ρ
1
(k) is M
i1
and ··· and ρ
p
(k) is M
p
Then
x
i
(k + 1) = (A
i
+ ∆A
i
)x
i
(k) + B
i
u(k)
+E
a
f
a
(k) + Dd(k)
y
i
(k) = Cx
i
(k) + E
s
f
s
(k) + Gv(k)
(1)
where i = {1, 2, · · · , r} and r is the number of rules as-
sociated to the different submodels, x(k) ∈ R
n
x
is the
state vector, u(k) ∈ R
n
u
is the input vector, y(k) ∈ R
n
y
is the measured output vector, d(k) ∈ R
n
x
is the ex-
ogenous disturbance, v(k) ∈ R
n
y
is the measurement
noise, M denote fuzzy sets and ρ
1
(k), · · · , ρ
p
(k) are
the premise variables. E
a
is fault distribution matrix
of actuator faults f
a
(k). Analogously, E
s
is the fault
distribution matrix of sensor faults f
s
(k). Combining
the local subsystems (1) considering the level of sat-
isfaction of each rule, the following model for the TS
system can be obtained:
x(k + 1) =
r
∑
i=1
ξ
i
(ρ(k))(A
i
+ ∆A
i
x(k) + B
i
u(k))
+ E
a
f
a
(k) + Dd(k)
y(k) = Cx(k) + E
s
f
s
(k) + Gv(k)
(2)
where ρ(k) = [ρ
1
(k), · · · , ρ
p
(k)]
T
is the vector con-
taining the premise variables, η
i
(ρ(k)) and ξ
i
(ρ(k))
are defined as follows:
η
i
(ρ(k)) =
p
∏
j=1
M
i j
(ρ
j
(k))
(3)
ξ
i
(ρ(k)) =
η
i
(ρ(k))
r
∑
i=1
η
i
(ρ(k))
(4)
where η
i
(ρ(k))(product of the membership functions
that correspond to the fuzzy sets of a i-th rule) is the
membership grade of ρ
i
(k) in η
i j
and ξ
i
(ρ(k)) is the
normalized membership function defined as:
r
∑
i=1
ξ
i
(ρ(k)) = 1
ξ
i
(ρ(k)) ≥ 0, i = {1,2,··· ,r}.
(5)
The matrices A
i
∈ R
n
x
×n
x
, B
i
∈ R
n
x
×n
u
and C ∈ R
n
y
×n
x
contain the system nominal parameters, ∆A
i
∈ R
n
x
×n
x
represent the parametric uncertainty that is assumed
to be not known but bounded ∆A
i
≤ ∆A
i
≤ ∆A
i
. Dis-
turbances d(k) and noise v(k) (assuming that V (k) is
the upper bound from measurement noise) are also
considered bounded, as follows:
d(k) ≤ d(k) ≤ d(k) (6)
|
v(k)
|
≤ V (k) (7)
2.2 Fault Estimation Scheme
2.2.1 Problem Formulation
The proposed fault estimation is based on designing
a TS interval observer for the uncertain system (2)
considering an augmented state vector that considers
faults in sensors ( f
s
(k)) and actuators ( f
a
(k)) as fol-
lows:
e
x(k) =
x(k) f
a
(k) f
s
(k)
T
(8)
The TS interval observer will provide an interval esti-
mation of the augmented stated
ˆ
e
x(k) ≤
e
x(k) ≤
ˆ
e
x(k) (9)
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
614

i.e., of the states and faults:
ˆx(k) ≤ x(k) ≤ ˆx(k) (10)
ˆ
f
a
(k) ≤ f
a
(k) ≤
ˆ
f
a
(k) (11)
ˆ
f
s
(k) ≤ f
s
(k) ≤
ˆ
f
s
(k) (12)
When creating the augmented model, it is considered
that the actuator fault (11) is modelled as follows:
f
a
(k + 1) = f
a
(k) + w
a
(k) (13)
where w
a
(k) ∈ R
f
considers the actuator fault varia-
tions that assumed to be bounded
w
a
(k) ≤ w
a
(k) ≤ w
a
(k) (14)
Similarly, the sensor fault f
s
(k) ∈ R
f
is modelled as
follows:
f
s
(k + 1) = f
s
(k) + w
s
(k) (15)
where w
s
(k) ∈ R
f
considers the sensor fault varia-
tions that assumed to be bounded
w
s
(k) ≤ w
s
(k) ≤ w
s
(k) (16)
w
a
(k) and w
s
(k) allowing to consider non-constant
faults.
The variations of the faults (w
a
(k) and w
s
(k)) are
taken into account altogether with the system distur-
bance d(k) by means of an augmented disturbance
considered for the TS interval observer design as fol-
lows:
e
d(k) =
d(k) w
a
(k) w
s
(k)
T
(17)
Considering the fault models (13) and (15), the aug-
mented model of the system considered for the design
the TS interval observer can be expressed in the fol-
lowing form:
e
x(k + 1) =
r
∑
i=1
ξ
i
(ρ(k))((
e
A
i
+ ∆
e
A
i
)
e
x(k) +
e
B
i
u(k))
+
e
D
e
d(k)
e
y(k) =
e
C
e
x(k) + Gv(k)
(18)
with:
e
A
i
=
A
i
E
a
0
0 I 0
0 0 I
,
e
B
i
=
B
i
0
0
,
e
x(k) =
x(k)
f
a
(k)
f
s
(k)
∆
e
A
i
=
∆A
i
0 0
0 0 0
0 0 0
,
e
C =
C 0 E
s
,
e
D =
D
I
I
where
e
A
i
∈ R
n
x
+n
f
×n
x
+n
f
are the matrices that contain
the matrices of distribution of f
a
(k) and f
s
(k).
The interval observer for TS system (18), follows the
Luenberger form (according to (Rotondo et al., 2016)
and (Efimov et al., 2013b)):
ˆ
e
x(k + 1) =
r
∑
i=1
ξ
i
(ρ(k))(
e
A
i
−
e
L
i
e
C)
ˆ
e
x(k) +
e
B
i
u(k) + (
g
∆A
i
+
ˆ
e
x
+
(k) −
f
∆A
i
+
ˆ
e
x
−
(k) −
f
∆A
−
i
ˆ
e
x
+
(k) +
f
∆A
−
i
ˆ
e
x
−
(k))
+
e
L
i
y(k) −
e
L
i
V (k)E
ny
+
e
D
e
d(k)
ˆ
e
x(k + 1) =
r
∑
i=1
ξ
i
(ρ(k))(
e
A
i
−
e
L
i
e
C)
ˆ
e
x(k) +
e
B
i
u(k) + (
f
∆A
+
i
ˆ
e
x
+
(k) −
g
∆A
i
+
ˆ
e
x
−
(k) −
f
∆A
i
−
ˆ
e
x
+
(k) +
g
∆A
i
−
ˆ
e
x
−
(k))
+
e
L
i
y(k) +
e
L
i
V (k)E
ny
+
e
D
e
d(k)
(19)
with:
e
L
i
=
L
i,x
L
i, f
a
L
i, f
s
,
e
L
i
=
L
i,x
L
i, f
a
L
i, f
s
,
ˆ
e
x(k) =
ˆx
i
(k)
ˆ
f
i, f
a
(k)
ˆ
f
i, f
s
(k)
ˆ
e
x(k) =
h
ˆx
i
(k)
ˆ
f
i, f
a
(k)
ˆ
f
i, f
s
(k)
i
T
where
e
L
i
∈ R
n
x
+n
f
×n
y
and
e
L
i
∈ R
n
x
+n
f
×n
y
are the
observer gains to be designed,
f
∆A
+
i
= max
n
0,
f
∆A
i
o
,
f
∆A
−
i
=
f
∆A
+
i
−
f
∆A
i
,
f
∆A
+
i
= max
n
0,
f
∆A
i
o
,
f
∆A
−
i
=
f
∆A
+
i
−
f
∆A
i
,
ˆ
e
x
+
= max
n
0,
ˆ
e
x
o
,
ˆ
e
x
−
=
ˆ
e
x
+
−
ˆ
e
x,
ˆ
e
x
+
= max
n
0,
ˆ
e
x
o
,
ˆ
e
x
−
=
ˆ
e
x
+
−
ˆ
e
x and, finally E
n
y
∈
R
n
y
×1
is the column vector with elements equal to 1.
e
d(k) and
e
d(k) are the bounds from (17). The output
interval estimation of y(k) can be obtained as follows:
ˆ
e
y =
e
C
ˆ
e
x and
ˆ
e
y =
e
C
ˆ
e
x.
To design the TS interval observer for the sys-
tem (2) with the augmented state vector including the
faults (13) and (15) should be observable. Observabil-
ity of the TS uncertain system (2) can be assessed us-
ing the approach proposed in (Ho et al., 2013). If the
following, it is assumed that this observability condi-
tion for the augmented system (18) is satisfied.
2.2.2 Integration with FDI
The proposed fault estimation scheme could be inte-
grated with a FDI scheme as the one proposed in (Ro-
tondo et al., 2016) and only activated once the fault
has been detected and isolated. In particular, a bank
of a bank of n
f
dedicated observers where each ob-
server has been designed to estimate only one fault
Fault Estimation using a Takagi-Sugeno Interval Observer: Application to a PEM Fuel Cell
615
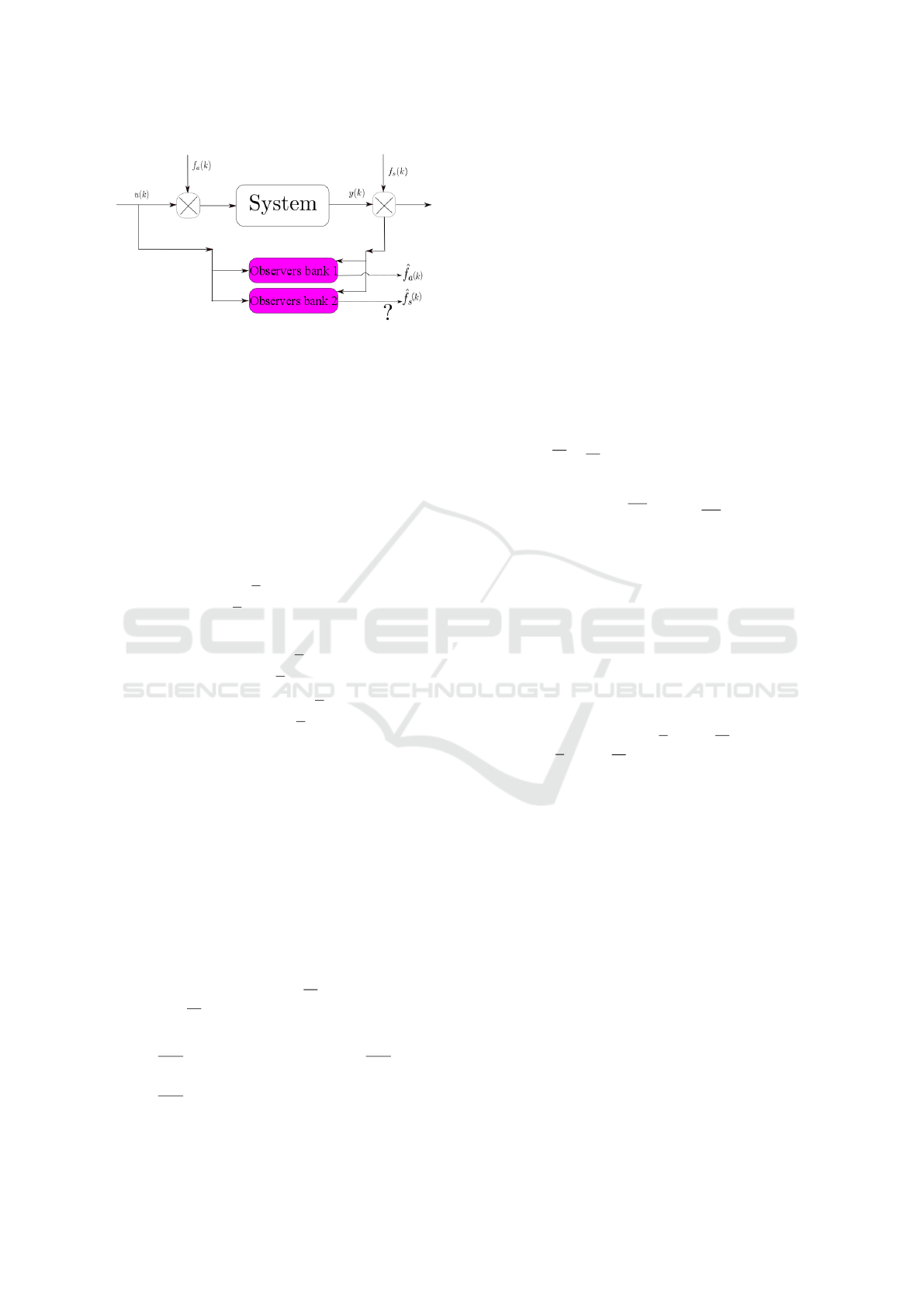
Figure 1: Integration with FDI using a bank of observers.
will be designed. Then, the TS interval observer that
considers as additional state the fault that has been
detected and isolated will be used for estimating the
fault. Alternatively, the fault estimation scheme can
be integrated with a bank of n
f
dedicated observers
where each observer has been designed to be sensi-
tive to only one fault (using as e.g., an unknown input
observer approach (Blanke et al., 2006)), as shown in
Fig. 1. In this second case, the following fault detec-
tion and isolation logic can be used: While the fault
estimation intervals provided by all the observers in
the bank satisfy
0 ∈ [
ˆ
f
i
,
ˆ
f
i
] i = 1,··· ,n
f
no fault is detected. Otherwise, when some of the ob-
servers provides a fault estimation interval satisfying
0 /∈ [
ˆ
f
i
,
ˆ
f
i
]
it means that the fault f
i
has been ocurred, being the
fault magnitude bounded by [
ˆ
f
i
,
ˆ
f
i
]
3 TAKAGI-SUGENO INTERVAL
OBSERVER DESIGN
To design a TS interval observer of the form (19) that
ensures (9), (and therefore (10), (11) and (12)) with
acceptable performance specified by means of an LMI
region, the following theorem is introduced.
Theorem 1. Given positive scalars ε
1
> 0, ε
2
> 0, a
TS interval observer (19) with performance defined
with an LMI region defined by two vertical strips (h
1
and h
2
) and a disk (r and q are the radius and center)
can be obtained, if there exist matrices P = P
T
> 0,
Q > 0 and
e
W
i
∈ R
2n
x
+n
f
×2n
u
e
W
i
∈ R
2n
x
+n
f
×2n
u
that
satisfy the following inequalities for i = {1,2,··· ,r}:
P
1+ε
1
PD
ai
−W
i
ϒ
P
1+ε
1
(PD
ai
−W
i
ϒ)
T
P − Q − λη
2
I
2n
x
0
P
1+ε
1
0 λI
2n
x
− τP
≥ 0
(20)
P
e
A
i
0
0
e
A
i
−W
i
ϒ ≥ 0 (21)
−rP ∗
qP + P
e
A
i
0
0
e
A
i
−W
i
ϒ −rP
< 0 (22)
e
A
i
0
0
e
A
i
P + P
e
A
i
0
0
e
A
i
T
+ 2h
2
P < 0 (23)
e
A
i
0
0
e
A
i
P + P
e
A
i
0
0
e
A
i
T
+ 2h
1
P > 0 (24)
with W
i
=
"
e
W
i
0
0
e
W
i
#
, λ > 0, τ = 1 + ε
2
+ (1 + ε
1
)
−1
D
ai
=
"
e
A
i
+
f
∆A
+
i
0
0
e
A
i
+
f
∆A
+
i
#
ϒ =
e
C 0
0
e
C
Proof: The theorem can be easily proved adapting
the results of (Efimov et al., 2013b) for LPV systems
and (Chilali and Gahinet, 1996) for pole placement in
one the LMI region.
Then, the gains of the interval observer (19) are
obtained after solving the inequalities (20), (21), (22),
(23) and (24)) as follows
e
L
i
= P
−1
e
W
i
and
e
L
i
= P
−1
e
W
i
(25)
with i = {1,2,··· ,r}.
4 CASE STUDY
4.1 Fuel Cell System
Fuel cells have been considered as alternative energy
sources for the future with potential application to
several areas: transport (buses, trucks, trains, etc),
military applications (portable soldier power), auxil-
iary power units, and electricity generation provide
electricity (and sometimes heat) (Wee, 2007). Pro-
ton exchange membrane fuel cells (PEMFC) are elec-
tromechanical devices in which the energy of a re-
action between a fuel, the hydrogen, and oxidant,
the oxygen, is directly and continuously converted
into electrical energy, obtaining water as a subprod-
uct (Pukrushpan et al., 2004). In the literature, we can
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
616

find works dealing with PEMFC, considering durabil-
ity, optimal control, model predictive control, fault di-
agnosis and different approaches for fuell cell model-
ing (electric equivalent model, state space model,etc)
(Rotondo et al., 2016).
The nonlinear model of the PEMFC (Pukrush-
pan et al., 2004), can be derivate by four subsys-
tems: compressor, supply manifold, cathode plus re-
turn manifold and anode. For illustrating purposes
and because of space limitations, the scheme pro-
posed in this paper only the compressor subsystem is
used.
4.2 Compressor System
The model of the compressor is described by means
of the following equation:
˙
ω
cp
= (−
˜
Z
3
V
cp
J
cp
R
cm
K
v
)ω
cp
+
˜
Z
3
J
cp
(
V
cp
R
cm
−
C
p
T
amb
η
cm
˜
η
cp
˜
Z
1
˜
Z
2
)
(26)
where ω
cp
is the compressor speed, K
v
is the motor
electric constant, J
cp
is the compressor and motor in-
ertia, R
cm
is the compressor motor circuit resistance,
C
p
is the air heat capacity at constant pressure, T
amb
is the ambient temperature and η
cm
is the compressor
efficiency V
cp
is the voltage,
˜
Z
1,2,3
are function of
the stack current I
st
. For assessing the nonlinear
compressor model the values and parameters of the
Table 1 and 2 are considered.
The model (26) can be rewritten of the form (2)
with the nonlinear sector approach, considering the
following that ρ(k) = I
st
(k) and the state space matri-
ces are:
A(ρ(k)) = (−
˜
Z
3
V
cp
J
cp
R
cm
K
v
)
B(ρ(k)) =
˜
Z
3
J
cp
(
V
cp
R
cm
−
C
p
T
amb
η
cm
˜
η
cp
˜
Z
1
˜
Z
2
)
where ω
cp
is the state, V
cp
is the input, I
st
is the
variable parameter. The dimensions of the matrices
are A(ρ(k)) ∈ R
1×1
and B(ρ(k)) ∈ R
1×1
.
The vertices models are scheduled under the
following:
ρ(k) =
I
st
(k)−I
stmin
I
stmax
−I
stmin
and ρ(k) =
I
stmax
−I
st
(k)
I
stmax
−I
stmin
.
Then, in order to obtain the results of the scheme
proposed is considered that the stack current is in the
range I
st
∈
100,300
mA. Then, using a sequence
of steps of 10 mA a set of 21 possible operating
points are obtained. The systems is discretized with a
sampling time T
s
= 0.01s.
Table 1: Parameters of the nonlinear model of a compressor.
Symbol Value
k
v
0.0153 V /(rad/s)
J
cp
5 × 10
−5
kg· m
2
R
cm
0.816 Ω
C
p
1004 J/(kg· K)
T
amb
298 K
η
cm
0.9
Table 2: Variables in the nonlinear model of a compressor.
Approximate variables
˜
η
cp
≈ 0.777217
˜
Z
1
≈ 0.275641 ·10
−3
I
st
− 0.340993·10
−3
˜
Z
2
≈ 0.001375I
st
− 0.023710
˜
Z
3
≈ −0.000426 ·10
−3
I
st
+ 0.213459·10
−3
4.3 Actuator Fault Estimation
For the actuator fault estimation, the following
dedicated observer is used:
ˆ
e
x(k + 1) =
∑
r
i=1
ξ
i
(ρ(k))(
e
A
i
−
e
L
i
[C 0])
ˆ
e
x(k) +
e
B
i
u(k)
+
f
∆A
+
i
ˆ
e
x
+
(k) −
f
∆A
+
i
ˆ
e
x
−
(k) −
f
∆A
−
ˆ
e
x
+
(k)
+
f
∆A
−
i
ˆ
e
x
−
(k) +
e
L
i
y(k) −
e
L
i
V (k)E
ny
+
e
D
e
d(k)
ˆ
e
x(k + 1) =
∑
r
i=1
ξ
i
(ρ(k))(
e
A
i
−
e
L
i
[C 0])
ˆ
e
x(k) +
e
B
i
u(k)
+
f
∆A
+
i
ˆ
e
x
+
(k) −
f
∆A
+
i
ˆ
e
x
−
(k) −
f
∆A
−
i
ˆ
e
x
+
(k) +
f
∆A
−
i
ˆ
e
x
−
(k) +
e
L
i
y(k) +
e
L
i
V (k)E
ny
+
e
D
e
d(k)
(27)
with:
e
A
i
=
A
i
E
a
0 I
,
e
B
i
=
B
i
0
,
e
L
i
=
L
i,x
L
i, f
a
e
L
i
=
L
i,x
L
i, f
a
,
ˆ
e
x(k) =
ˆx(k)
ˆ
f
i, f
a
(k)
,
ˆ
e
x(k) =
"
ˆ
x(k)
ˆ
f
i, f
a
(k)
#
f
∆A
+
i
=
∆A
+
i
0
0 0
,
f
∆A
+
i
=
∆A
+
i
0
0 0
f
∆A
−
i
=
∆A
−
i
0
0 0
,
f
∆A
−
i
=
∆A
−
i
0
0 0
,
e
D =
D
I
The observer gains are placed in a LMI region,
defined as the intersection of a disk sector with
r = 1, q = 0 and two vertical strips: h
1
= −0.11 and
h
2
= −0.9.
Fault Estimation using a Takagi-Sugeno Interval Observer: Application to a PEM Fuel Cell
617
To assess the performance of fault estimation
provided by the TS interval observer, two type of
faults are considered (abrupt fault and incipient fault).
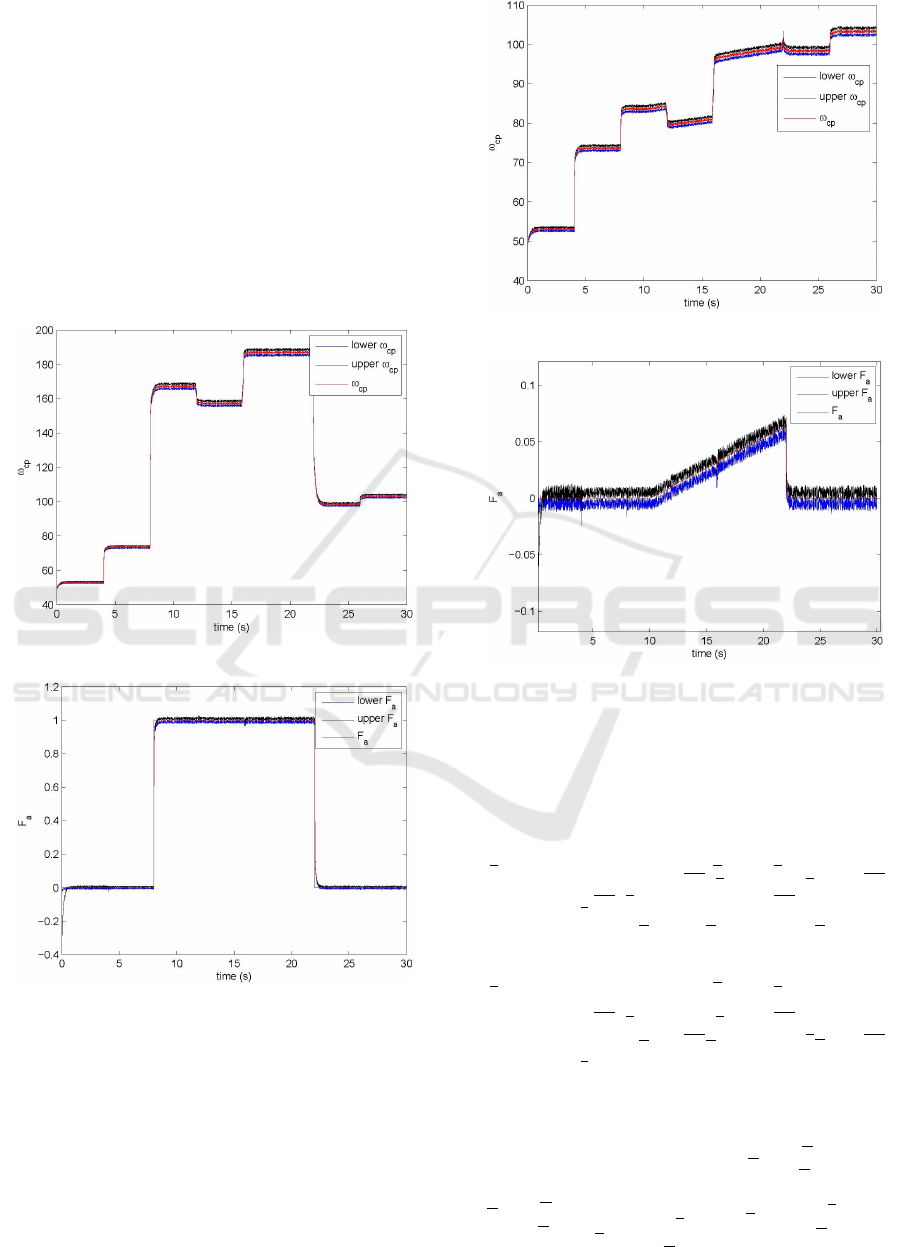
Case 1.- Abrupt Fault
With the aim of showing the estimator performance in
case of an actuator fault, an abrupt change of 8 to 22
sec is made. Figure 2 shows that although there exists
a fault, the observer is able to estimate ω
cp
.
Figure 3 presents the fault estimation ( f
a
) where
the estimator is slow when the fault occurs but after
a transient it can provide an interval for the fault esti-
mation.
Figure 2: Estimation of ω
cp
.
Figure 3: Estimation of f
a
.
Case 2.- Incipient Fault
Considering an incipient fault scenario, we can ob-
serve that the observer is able to estimate this type of
fault, Figure 4 shows the state estimation ω
cp
while
Figure 5 illustrates the fault estimation. From these
two figures, it can be seen that the observer (27) is
able to estimate adequately the fault and the state.
Figure 4: Estimation of ω
cp
.
Figure 5: Estimation of f
a
.
4.4 Sensor Fault Estimation
For the sensor fault estimation, the following TS
interval observer is used:
ˆ
e
x(k + 1) =
∑
r
i=1
ξ
i
(ρ(k))(
e
A
i
−
e
L
i
[C E
s
])
ˆ
e
x(k) +
e
B
i
u(k)
+
f
∆A
+
i
ˆ
e
x
+
(k) −
f
∆A
+
i
ˆ
e
x
−
(k) −
f
∆A
−
ˆ
e
x
+
(k) +
f
∆A
−
i
ˆ
e
x
−
(k) +
e
L
i
y(k) −
e
L
i
V (k)E
ny
+
e
D
e
d(k)
ˆ
e
x(k + 1) =
∑
r
i=1
ξ
i
(ρ(k))(
e
A
i
−
e
L
i
[C E
s
])
ˆ
e
x(k) +
e
B
i
u(k)
+
f
∆A
+
i
ˆ
e
x
+
(k) −
f
∆A
+
i
ˆ
e
x
−
(k) −
f
∆A
−
i
ˆ
e
x
+
(k) +
f
∆A
−
i
ˆx
−
(k) +
e
L
i
y(k) +
e
L
i
V (k)E
ny
+
e
D
e
d(k)
(28)
with:
e
A
i
=
A
i
0
0 I
,
e
B
i
=
B
i
0
,
e
L
i
=
L
i,x
L
i, f
s
e
L
i
=
L
i,x
L
i, f
s
,
ˆ
e
x(k) =
ˆx(k)
ˆ
f
i, f
s
(k)
,
ˆ
e
x(k) =
"
ˆ
x(k)
ˆ
f
i, f
s
(k)
#
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
618
f
∆A
+
i
=
∆A
+
i
0
0 0
,
f
∆A
+
i
=
∆A
+
i
0
0 0
f
∆A
−
i
=
∆A
−
i
0
0 0
,
f
∆A
−
i
=
∆A
−
i
0
0 0
,
e
D =
D
I
In this case, the LMI region is defined by a disk
sector with r = 1, q = 0, h
1
= −0.81 and h
2
= −0.99
are considered for the vertical strips.
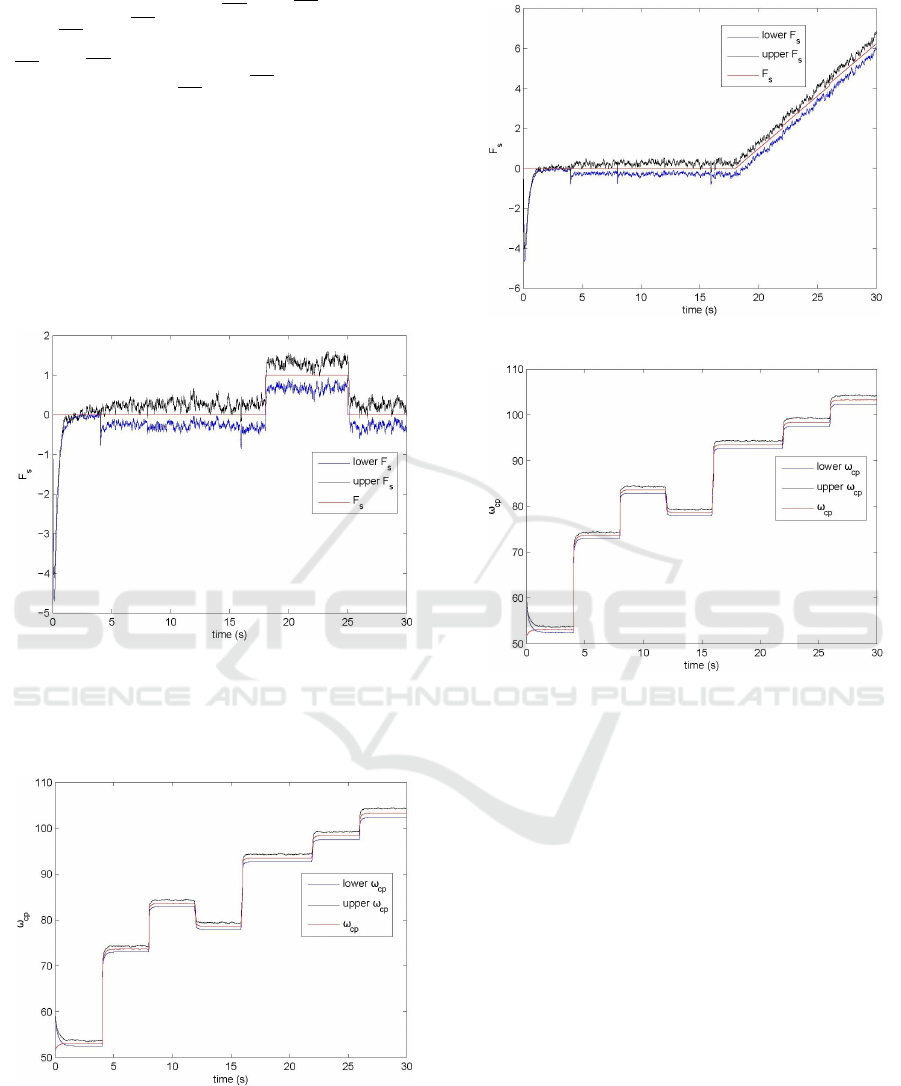
Case 1.- Abrupt Fault.
An abrupt fault occurs from 18 to 25 sec affecting the
speed sensor. Figure 6 presents the interval estimation
that for this case the observer (28) can estimate.
Figure 6: Estimation of f
s
.
The state estimation of the TS system with the
fault affecting the speed sensor is shown in the Fig-
ure 7.
Figure 7: Estimation of ω
cp
.
Case 2.- Incipient Fault.
Figure 8 illustrates the interval fault estimation when
the incipient fault is applied in the output sensor. The
state estimation is presented in the Figure 9.
Figure 8: Estimation of f
s
.
Figure 9: Estimation of ω
cp
.
5 CONCLUSION
In this paper, an approach for estimating faults using
the TS interval observer is proposed. Faults are con-
sidered as an additional state in the observer model.
The proposed method allows to obtain the estimation
of faults and state simultaneous. In case that observ-
ability conditions are satisfied FDI is not required.
Otherwise, it should be used combined with a bank
of observers dedicated to a subset of faults. The pro-
posed approach have been satisfactorily tested on the
compressor of fuel cell system in several scenarios in-
cluding abrupt and incipient faults. As a future work,
the proposed scheme will extended to process faults
and to the case of unmeasured premise variables.
ACKNOWLEDGMENTS
This work has been partially funded by the Spanish
Government (MINECO) through the project ECO-
Fault Estimation using a Takagi-Sugeno Interval Observer: Application to a PEM Fuel Cell
619

CIS (ref. DPI2013- 48243-C2-1-R), by MINECO
and FEDER through the project HARCRICS (ref.
DPI2014-58104-R).
REFERENCES
Aouaouda, S., Boukhnifer, M., and Bouhali, O. (2014).
Sensor fault observer design for uncertain Takagi-
Sugeno Systems. In In 2014 IEEE 23rd International
Symposium on Industrial Electronics (ISIE), pages
236–241.
Blanke, M., Kinnaert, M., Lunze, J., and Staroswiecki,
M. (2006). Diagnosis and Fault-Tolerant Control.
Springer-Verlag.
Brune, B. and F, M. (2001). Detecting leaks in pressurised
pipes by means of transients. Journal of hydraulic
research, 39(5):539–547.
Chilali, M. and Gahinet, P. (1996). H
∞
design with pole
placement constraints: an LMI approach. Birches J,
41(3):358–367.
Efimov, D., Rassi, T., and Zolghadri, A. (2013a). Control
of nonlinear and lpv systems: Interval observer-based
framework. In IEEE Transactions on Automatic Con-
trol, volume 58, pages 773–778.
Efimov, D. V., Rassi, T., Perruquetti, W., and Zolghadri, A.
(2013b). Estimation and control of discrete-time lpv
systems using interval observers. In Proceedings of
the IEEE 52nd Annual Conference on Decision and
Control (CDC), pages 5036–5041.
Guerra, T. M., Estrada-Manzo, V., and Lendek, Z. (2015).
Observer design for Takagi-Sugeno descriptor mod-
els: An LMI approach. Automatica, 52:154–159.
Ho, W. H., Chen, S. H., and Chou, J. H. (2013). Observabil-
ity roburobust of uncertain fuzzy-model-based control
systems. International Journal of Innovative Comput-
ing, Information and Control, 9(2):805–819.
Hwang, I., Kim, S., Kim, Y., and Seah, C. E. (2010). A
survey of fault detection, isolation, and reconfigura-
tion methods. IEEE Transactions on Control Systems
Technology, 18(3):636–653.
Ichalal, D., Marx, B., Ragot, J., and Maquin, D. (2010).
Brief paper: state estimation of Takagi-Sugeno sys-
tems with unmeasurable premise variables. IET Con-
trol Theory & Applications, 4(5):897–908.
L
¨
ofberg, J. (2004). YALMIP : A toolbox for modeling and
optimization in MATLAB. In Computer Aided Con-
trol Systems Design, 2004 IEEE International Sympo-
sium on.
Mahmoud, H., Jiang, J., and Zhang, Y. (2003). Active fault
tolerant control systems. Berlin:Springer-Verlag.
Noura, H., Theilliol, D., and J, C. (2009). Fault-tolerant
control systems: design and practical applications.
Berlin:Springer-Verlag.
Puig, V. (2010). Fault diagnosis and fault tolerant control
using set-membership approaches: Application to real
case studies. International Journal of Applied Mathe-
matics and Computer Science, 20(4):619–635.
Pukrushpan, J. T., Peng, H., and Stefanopoulou, A. G.
(2004). Control-oriented modeling and analysis for
automotive fuel cell systems. Journal of dynamic sys-
tems, measurement, and control, 126(1):14–25.
Rassi, T., Videau, G., and Zolghadri, A. (2010). Inter-
val observer design for consistency checks of nonlin-
ear continuous-time systems. Automatica, 46(3):518–
527.
Rotondo, D., Fernandez-Canti, R. M., Tornil-Sin, S., Blesa,
J., and Puig, V. (2016). Robust fault diagnosis of
proton exchange membrane fuel cells using a Takagi-
Sugeno interval observer approach. International
Journal of Hydrogen Energy, 41(4):2875–2886.
Samy, L., Postlethwaite, L., and Gu, D. W. (2011). Survey
and application of sensor fault detection and isolation
schemes. Control Engineering Practice, 19(7):658–
874.
Takagi, T. and Sugeno, M. (1985). Fuzzy identification of
systems and its application to modeling and control.
IEEE Transactions on Systems, Man, and Cybernet-
ics, SMC-15:116–132.
Wee, J. H. (2007). Applications of proton exchange mem-
brane fuel cell systems. Renewable and Sustainable
Energy Reviews, 11(8):1720–1738.
Witczak, M. (2007). Modelling and Estimation Strategies
for Fault Diagnosis of Non-linear Systems: From An-
alytical to Soft Computing Approaches. Lecture Notes
in Control and Computer Science.
Witczak, M. (2014). Fault diagnosis and fault-tolerant con-
trol strategies for non-linear Systems. Springer.
Zhang, K., B, J., and Shi, P. (2009). A new approach
to observer-based fault-tolerant controller design for
Takagi-Sugeno fuzzy systems with state delay. Cir-
cuits, Systems and Signal Processing, 28(5):679697.
Zhang, Y. and Jiang, J. (2008). Bibliographical review on
reconfigurable fault-tolerant control systems. Annual
Reviews in Control, 32(2):229–252.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
620
