
Entropic Brain-computer Interfaces
Using fNIRS and EEG to Measure Attentional States in a Bayesian Framework
Samuel W. Hincks
1
, Sarah Bratt
2
, Sujit Poudel
2
, Vir V. Phoha
2
, Robert J. K. Jacob
1
,
Daniel C. Dennett
1
and Leanne M. Hirshfield
2
1
Tufts University, Medford, MA, 02155, U.S.A.
2
Syracuse University, Syracuse, NY, 13210, U.S.A.
Keywords:
BCI, Brain-computer Interface, fNIRS, EEG, Workload, Implicit Interface, Attention, Task-positive Network,
Default Mode Network, Entropy, Physiological Computing, Entropic Brain-computer Interface, Bidirectional
Brain-computer Interface, ADHD, Meditation.
Abstract:
Implicit Brain-Computer Interfaces (BCI) adapt system settings subtly based on real time measures of brain
activation without the user’s explicit awareness. For example, measures of the user’s cognitive profile might
drive a system that alters the timing of notifications in order to minimize user interruption. Here, we consider
new avenues for implicit BCI based on recent discoveries in cognitive neuroscience and conduct a series
of experiments using BCI’s principal non-invasive brain sensors, fNIRS and EEG. We show how Bayesian
and systems neuroscience formulations explain the difference in performance of machine learning algorithms
trained on brain data in different conditions. These new formulations posit that the brain aims to minimize its
long-term surprisal of sensory data and organizes its calculations on two anti-correlated networks. We consider
how to use real-time input that portrays a user along these dimensions in designing Bidirectional BCIs, which
are Implicit BCIs that aim to optimize the user’s state by modulating computer output based on feedback from
a brain monitor. We introduce Entropic Brain-Computer Interfacing as a type of Bidirectional BCI which uses
physiological measurements of information theoretical dimensions of the user’s state to evaluate the digital
flow of information to the user’s brain, tweaking this output in a feedback loop to the user’s benefit.
1 INTRODUCTION
In contrast to direct brain-computer interfaces
(BCIs), which attempt to build a brain-based substi-
tute for mice, keyboards, and other direct input meth-
ods, implicit BCIs (Poel et al., 2012; Zander et al.,
2014; Zander et al., 2010) strive to portray dimen-
sions about the user that are otherwise invisible to a
computer, and use brain data to update system pa-
rameters whose values are better left beyond direct
user control or attention but might still be usefully
adjusted in response to the user’s cognitive profile.
In this paper, we attempt to sketch a process for au-
tomatically inferring whether or not a system prop-
erty is a useful target for adaptation based on how it
alters brain activation along two dimensions. In or-
der to do this, we first explain the concept of entropy
as it relates to brain functioning. In brief, Bayesian
cognitive science posits that information processing
in the brain increases when the brain fails to account
for system input; and this increased prediction er-
ror, randomness, and computation in the brain cor-
relates with the introspectable richness of experience
(Carhart-Harris et al., 2015). Therefore, a user in-
terface that tracked the cognitive burden that its con-
stituent elements placed on a user, and adapted these
information scores based on brain entropy measures,
could learn how to customize itself to optimally en-
rich user experience.
In this paper, we compare the performance of
machine learning algorithms calibrated on data from
fNIRS on EEG when detecting different levels of cog-
nitive workload as well as transitions between task
and rest. Based on the Bayesian formulation that
computation and energy expenditure in the brain de-
pends in part on the novelty of information, we hy-
pothesize that the performance of machine learning
algorithms will degrade in the second session of an
experiment. In the three sections of this paper, we ex-
plain how this property can be exploited as a feature
not a bug of BCI.
Three interdisciplinary research questions under-
Hincks, S., Bratt, S., Poudel, S., Phoha, V., K. Jacob, R., Dennett, D. and Hirshfield, L.
Entropic Brain-computer Interfaces.
DOI: 10.5220/0006383300230034
In Proceedings of the 4th International Conference on Physiological Computing Systems (PhyCS 2017), pages 23-34
ISBN: 978-989-758-268-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
23

Figure 1: The three challenges of BCI and how they inter-
act.
lie the creation of implicit brain-computer interfaces.
First, an appropriate set of dimensions for the user’s
state needs to be identified. Much of previous BCI
research uses machine learning algorithms to classify
the user’s state; the dimensionalization component of
BCI amounts to deciding what states about the user
the machine learning algorithms will classify. For ex-
ample, many implicit BCIs (Afergan et al., 2014b;
Afergan et al., 2014a; Afergan et al., 2015; Yuksel
et al., 2016; Solovey et al., 2012) attempt to parse
the user’s cognitive workload. We refer to the chal-
lenge of identifying dimensions with both neurobio-
logical meaning and relevance to interface design as
the dimensionalization challenge of BCI. Second, for
HCI, these dimensions must somehow be extracted
on the basis of measurements collected from non-
invasive and low-cost sensors, which we call the por-
trayal challenge of BCI. With known dimensions and
methods of extracting them using practical sensors,
the final challenge, what we call the interaction chal-
lenge, is to map classification interactively onto dy-
namic system parameters that drive adaptations to the
user’s benefit, and to measure such benefits. We illus-
trate these challenges and how they interact in Figure
1.
There are currently two brain sensors sufficiently
promising for ordinary human-computer interaction
scenarios: EEG (electroencephalography) and fNIRS
(functional near infrared spectroscopy). They each
have different advantages and disadvantages, comple-
ment each other quite well, and have been studied
separately many times. EEG and fNIRS both index
a user’s brain activation. EEG relies on a chemi-
cally induced electrical charge that occurs at a neu-
ron’s action potential (the fundamental unit of com-
putation in the brain). The EEG infers the aggregate
of many such events by measuring voltage changes
on the user’s scalp. The detected voltage at the scalp
oscillates according to specific patterns, which con-
veys information about the activity of neurons, espe-
cially near the cortex (Teplan, 2002). fNIRS relies
on a neuron’s need for oxygen to execute an action
potential. When a given region is enlisted for com-
putation, it consumes the oxygen it has available lo-
cally and requests more. By introducing near-infrared
light from sensors by a user’s forehead, which pene-
trates skin and bone but is sensitive to hemoglobin in
the blood, a nearby light detector can infer changes
to the amount of oxygen present, as oxygenated and
deoxygenated blood absorb and scatter the light dif-
ferently (Ferrari and Quaresima, 2012). Unlike EEG,
whose most studied signals oscillate at frequencies
ranges above 1 Hertz, fNIRS takes seconds to register
changes in state. This prevents fNIRS from indexing
the high frequency patterns powering the EEG signal
but opens the device to measure longer term patterns
in brain activation (Pfurtscheller et al., 2010).
Complementing each other’s weaknesses and sup-
plementing each other’s strengths, fNIRS and EEG
seem to invite integration into a singular input device
that delivers a suite of predictions about the user’s
cognitive, emotional, and intentional state. EEG has
poor spatial resolution (Berka et al., 2004), mean-
ing it is difficult to resolve from where a given sig-
nal is originating; but it has good temporal resolu-
tion, meaning a given measurement is temporally very
close to the phenomenon it endeavors to portray. Con-
versely, fNIRS has good spatial resolution but poor
temporal resolution (Ferrari and Quaresima, 2012).
Because of its good temporal resolution, EEG can
capture a brief episode of mental activity and trans-
late that activity into a command. For example, a
user might imagine body movements (moving left or
right hands) which would produce a machine learn-
able EEG signal, which then could be mapped to a
deliberate command (Guger et al., 2003). fNIRS is
very difficult to use for direct input because it would
necessarily take seconds for the command to register.
But EEG’s sensitivity to short term electrical fluctua-
tions leaves it vulnerable to noisy inputs. For exam-
ple, an eye blink and other movement also produces
an electrochemical effect that drowns the neurologi-
cal signal underlying state classification (Berka et al.,
2004; Hoffmann and Falkenstein, 2008). fNIRS does
not suffer as severely from noise (Maior et al., 2015;
Solovey et al., 2009).
In this paper, we make three contributions to im-
plicit brain-computer interfacing, in dimensionaliza-
tion, portrayal, and interaction, and show how these
three pieces fit together using the concept of entropy
to lead to the design and implementation of bidirec-
tional brain-computer interfaces:
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
24

Dimensionalization: In the second section, we
connect the concept of cognitive workload to sys-
tem entropy in the Bayesian framework. Cognitive
workload is the standard term for cerebral engage-
ment, and is the user dimension that existing implicit
BCIs (Afergan et al., 2014b; Solovey et al., 2012;
Yuksel et al., 2016) have generally targeted for adap-
tation. Here, we ground cognitive workload with
information-theoretical principles in Bayesian cogni-
tive science and suggest that BCI supplement the one-
dimensional workload attribute with a second user di-
mension, which resolves which spatial network is ex-
ecuting the cognitive workload.
Portrayal: In the third section, we run two sets
of identical two-session experiments, where the user
undergoes a series of computer-based task transitions.
We use the EEG and fNIRS datasets to build machine
learning algorithms that classify users along the di-
mensions proposed in section two, and evaluate their
performance internally using standard cross-fold val-
idation techniques. In the process, we relate the mea-
surement of the two brain sensors (EEG and fNIRS)
which are the obvious candidates to be the mouse
and keyboard of next generation brain-computer in-
terfaces but whose performance is seldom evaluated
in concert. We suggest that EEG and fNIRS are better
suited for detecting different dimensions of a user.
Interaction: Section four uses theory from section
two and data from section three to propose a way for
interactive systems to automatically discover and ad-
just what elements can be updated in order to pull the
user’s state in directions that improve the quality of
attention, leading to designs for future user interfaces.
2 DIMENSIONALIZATION
Good dimensionalization is essential to implicit BCI
because without a link between mental states and the
neurobiological machinery that computes it, it should
be impossible to build an algorithm that predicts the
mental state from brain sensors. If dimensionalization
is done properly, then implicit BCI has a small library
of dimensions that are true enough to the basic oper-
ation of the brain to show an effect to non-invasive
brain sensors but far enough away from its mathe-
matical calculations to transmit meaning to a user in-
terface designer. Physiological computing research
attempts to measure dimensions of the user’s men-
tal states, e.g. cognitive workload (Fairclough et al.,
2005; Venables and Fairclough, 2009), task engage-
ment (Fairclough et al., 2009), stress (Fairclough,
1993), and various emotions (Picard, 1997). These
dimensions are born from psychological research, and
provide the basis for our previous adaptive systems
(Afergan et al., 2014b; Afergan et al., 2015; Afergan
et al., 2015). In these systems, we train a machine
learning algorithm to separate a user’s cognitive pro-
file during different levels of the n-back, a psycho-
logical induction scheme that varies the strain on a
user’s attention and short term memory. Cognitive
workload classifications then drive system adapta-
tions, such as controlling interruptions (Afergan et al.,
2015) or changing difficulty levels (Afergan et al.,
2014a). In this section, we reinterpret these user di-
mensions from cognitive and systems neuroscience
literature. The two most practical dimensions we find
in this investigation provide an information theoreti-
cal formulation of cognitive workload, stress, and task
engagement. In section 3, we show how these formu-
lations are useful for explaining the behavior of ma-
chine learning algorithms; and in section 4, we con-
sider new avenues for adaptive design based on these
dimensions.
There is compelling evidence in recent neu-
roimaging literature to suggest that the brain is con-
sistent in how it organizes the goals of its informa-
tion processing (Friston, 2010). According to the
Bayesian Brain Hypothesis (BBH), the basic goal of
the brain is to actively and parsimoniously predict and
suppress external sensory signals using the knowl-
edge of internal models, and to update these mod-
els so that prediction error is minimized in the fu-
ture (Friston, 2010). The brain might be summa-
rized as a hierarchical prediction and error correc-
tion machine (Clark, 2013), in which information
processing proceeds bidirectionally, so that statisti-
cally informed prediction flows from the top-down
and prediction error modifies internal statistics from
the bottom-up. Thus, computation at large (cogni-
tive workload) ought to increase when the informa-
tion content of the task or environment dictates in-
terest and modification in more top-down predictive
machinery. When circumstance is novel relative to
the brain, more prediction error propagates through
the hierarchical Bayesian filter, causing data flows
to branch and spread up the information processing
hierarchy (Carhart-Harris et al., 2015); and it is to
this broadly defined event which we hypothesize non-
invasive brain sensors positioned at the outer edges of
the brain are approximately sensitive.
Entropy: In general, entropy indexes the average
amount of surprisal in an information processing sys-
tem, and in the brain, entropy is high when internal
models fail to account for system input. High entropy
states include infant consciousness (characterized by
the lack of concepts needed to suppress external stim-
uli), early psychosis (characterized as a bug to top-
Entropic Brain-computer Interfaces
25

down reality testing), near death experiences (a sit-
uation that is unusual and interesting), psychedelics
(which bind to receptors in hierarchically central top-
down information throttlers) and creativity (where ex-
isting models are penetrated and recalibrated by orig-
inal material) (Carhart-Harris et al., 2015). The as-
sociation between the reported richness of these ex-
periences and their consistent grounding in terms of
information processing that we hypothesize EEG and
fNIRS can detect opens new avenues for design; it
implies that appropriately designed implicit BCIs can
coerce rich and creative experience by intelligently
modulating information content in response to brain
activity.
Predominant Network: When the informational
exchange between human and computer is too low or
high, the mind tends to retreat into an internal mode
of cognition (Csikszentmihalyi, 1996; Raichle et al.,
2001). In this mode, the brain grants more resources
to endogenous systems, which are not yoked to the ex-
ternal environment (Raichle, 2010). Instead of com-
puting on data that originates from the senses, these
resting networks (the most prominent of which is the
default mode network) (Raichle et al., 2001) operate
on endogenous data or memories – planning, reflect-
ing, and fantasizing. Because these networks gener-
ally operate even when the organism is otherwise lib-
erated to take a break, the net oxygen consumption of
the brain decreases by less than 5% at rest (Raichle,
2010), implying that a BCI that attempts to maximize
user experience must supplement its cognitive work-
load or entropy index with a secondary dimension that
informs the user interface the space in which compu-
tation is occurring in the brain. Conveniently for BCI,
these endogenous resting networks are anti-correlated
with the exogenous task-positive networks, making
them especially suitable candidates for detection by
a spatially well-resolved brain monitor, since nodes
from the opposite network can be used to constrain
false positives and most regions have a known and
consistent bias towards involvement in either one of
these two networks (Glasser et al., 2015). Since time
spent mind wandering predicts reported present and
future happiness (Killingsworth and Gilbert, 2010),
implicit BCI that learned how to apply system adapta-
tions that minimized endogenous retreat could impact
user happiness beyond the immediate experience.
Together, entropy and attentional orientation ex-
plain the user dimensions already posited in psycho-
logical and physiological computing literature. For
example, task engagement and stress are both high en-
tropy, but engagement may involve the more consis-
tent application of exogenous computation, whereas
stress may imply periodic retreat into introspective
networks. Designing for cognitive neuroscience di-
mensions and not psychological dimensions is worth-
while for implicit BCI, since these systems need to
base user classification on physiological measure-
ments from brain sensors. We predict that the greater
the distance between tasks along these two dimen-
sions, the easier it is for a machine learning algorithm
to separate instances of those tasks.
The problem for BCI is that each user’s brain is
unique, and therefore poses unique external require-
ments for coercing it into different states. Further-
more, brains change over time based on new input.
For these reasons, we think it is critical to dimension-
alize the user with the intuitions of Bayesian mathe-
matics (Perfors et al., 2011). If the energy expenditure
of the brain is proportional to the degree to which it
must update belief and action in order to integrate evi-
dence from the environment and if non-invasive brain
sensors are principally sensitive to physiological cor-
relates of that energy expenditure, then the novelty
of a task in relation to a control (e.g. resting state)
is likely low hanging fruit for a machine learning al-
gorithm operating on either fNIRS or EEG data to
classify. To test this, we have repeated our experi-
ment twice, and evaluated the change in performance
of machine learning algorithms from a first to second
session.
Bayesian cognitive science argues that the brain
seeks to minimize its entropy but that it generates
more computation and experience (Carhart-Harris
et al., 2015) when it is in a state of high entropy.
Many humans struggle to reconcile their brain’s nat-
ural urge to rewire itself towards lower entropy with
the desire for rich experience. A well-designed user
interface can assist in this endeavor. In section 4, we
describe entropic BCIs, which attempts to judiciously
modulate user-mediated information in order to pull
the brain into exogenous high entropy states. Figure 2
simplifies the user as always belonging to one of four
states, the desirability of which depends on the current
scenario. A rigid and mild endogenous brain indi-
cates boredom or tiredness; a random and intense en-
dogenous brain indicates creativity or anxiety; a rigid
and mild exogenous brain indicates relaxation; and a
random and intense exogenous brain indicates flow or
stress. Each state has specific user affordances, tasks
which suits it, controlled and incidental means to cal-
ibrate machine learning algorithms that detect it, as
well as guidelines for how to transform the state into
another one.
In our experiment, we hypothesize that fNIRS,
which has good spatial resolution, is better than EEG
at classifying when user’s transition from resting to
task states, but that EEG, which has good temporal
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
26

Figure 2: A simplification of users into four states along two
dimensions, which we expect to be low hanging fruit for
detection via fNIRS and EEG. The Cognitive Workload or
Entropy dimension indexes the degree of computation and
surprise in the user’s brain, and the Attentional Orientation
or Predominant Network dimension indexes the degree to
which this computation is engaged in a goal-directed loop
with its sensory environment.
resolution, is better than fNIRS at indexing a user’s
entropy or workload, since information processing
occurs quickly in the brain.
3 PORTRAYAL
In typical BCI experiments at the portrayal level, the
subject undergoes a series of task transitions under si-
multaneous interrogation of brain monitors (Girouard
et al., 2009; Hirshfield et al., 2009; Hirshfield et al.,
2011). These experiments and many others pack-
age results as the performance and behavior of ma-
chine learning algorithms, where the brain data of tri-
als of the same condition receive the same label and
are translated into a statistical feature-space. Machine
learning algorithms, such as support vector machines,
build models for relating the feature-space to the la-
bel, and, if the brain data differs between the two con-
ditions, then machine learning algorithms should be
able to predict the labels of trials that were not a part
of its training model. The performance of a machine
learning algorithm can be evaluated using a cross-fold
validation scheme, where a model is built many times,
each time excluding from its training set a new set of
trials for its testing set. This machine learning method
will be the basis for how we distribute results in this
section. Because the novelty of the experiment is that
we have repeated it four times using two portable
Figure 3: Hitachi fNIRS equipment.
brain sensing instruments (EEG and fNIRS), we can
observe what dimensions of user information process-
ing are better left to the jurisdiction of either sensor,
in the hope of specifying how an fNIRS and EEG-
integrated could jointly classify the user’s state.
3.1 Equipment
The EEG used in this experiment was Advanced Brain
Monitoring’s b-alert X10, a 9 channel wireless EEG
system with a linked mastoid reference, sampling at
256hz. The EEG headset was placed on users us-
ing standard 10-20 measurement set-up techniques
(Homan et al., 1987). Figure 5 shows the nine regions
of the brain measured by each channel.
The fNIRS device used in this experiment was the
Hitachi ETG-4000 fNIRS device with a sampling rate
of 10Hz. The fNIRS probe (Figure 3) was a 3x11
probe with 17 light sources and 16 detectors, resulting
in 52 locations measured on the head.
3.2 Method
Twenty-three subjects (8 female) between the ages
18 and 49 participated in the experiment. Upon ar-
rival, subjects consented to the experiment and were
fitted with the fNIRS or EEG sensors. The prepack-
aged b-alert and Hitachi software calibrated itself to
the detected connection with the user’s scalp. Then,
the subject alternated between 8 instances of an arith-
metic task and 8 instances of an image-matching task,
performing each task for 35 seconds, with 15-second
controlled rest periods in between. For the image-
matching task, users indicated whether sequences of
images matched each other, as in an n-back (Gevins
and Smith, 2003) with n permanently set to 1, similar
to the low cognitive workload condition used in previ-
ous implicit BCI work (Afergan et al., 2014a). For the
arithmetic task, users added two two-digit integers to
each other, entering the response into a text-box. We
included workload in two separate modalities in order
to, potentially, induce two separate states of workload
In figure 4, we show the computer output for these
tasks and in figure 2, we plot these tasks (and com-
Entropic Brain-computer Interfaces
27

Figure 4: The three conditions of the experiment.
parisons between them) along the spectra of cognitive
workload and attentional orientation.
We were thus interested in the transition between
task and rest, and how that would change in the first
and second session for both EEG and fNIRS. Our in-
terest in inter-session comparison was born out of a
consideration for how machine learning algorithms
might decay over time if they did not account for up-
dates to the user’s cognition. We were especially in-
terested in corroborating a previous small long term
pilot (Hincks et al., 2016), where we tracked one of
the author’s fNIRS data over the course of several
months as he made himself an expert at the cognitive
workload tasks typically used in implicit BCI (the n-
back). In later sessions, we noticed that fNIRS failed
to register a strong effect unless the difficulty placed
him at the edge of his ability, and we hypothesized
that the task had over time generated too efficient top-
down schemes for solving it, thereby leaking less pre-
diction error, the information theoretical construct to
which we hypothesize these cortically-sensing instru-
ments are principally sensitive. If that is the case,
then machine learning algorithms operating from ei-
ther EEG or fNIRS data should degrade in a second
session of the experiment. The experiment was thus
repeated four times in two sessions for each device
on two separate days. The second session for a given
participant was at most 27 days later and at least 23
days later.
For each of the 23 subjects, we therefore had four
datasets (two sessions for each device). Each dataset
included 8 trials for the math task, 8 for the image
task, and 16 for the resting task. We were interested
in whether or not we could build a machine learn-
ing algorithm to separate the image and math task
using both fNIRS and EEG data, and how this algo-
rithm might change in the second session. We built a
new machine learning algorithm, for each subject for
each session, and for each neuroimaging device. We
tried one approach for feature design using specifica-
tions we optimized elsewhere (Treacy Solovey et al.,
2015), and for ease of communication, we let this al-
gorithm be identical for both EEG and fNIRS, leaving
the critical preprocessing components to the software
distributed by Hitachi and the b-alert EEG.
For fNIRS, the input to our data mining scheme
was a matrix of 52 channels that had been converted
from light intensity into oxygenation measurements
according to the Beer-Lambert Law, and bandpass fil-
tered, leaving only the components of the signal that
fluctuated between 0.01 and 0.5 hz. In our analysis,
we omitted deoxygenation measurements since these
values largely convey the same information as oxy-
genation. For EEG, the raw data was processed by
Advanced Brain Monitoring’s proprietary acquisition
software, which includes artifact decontamination al-
gorithms for eye blinks, muscle movements, and en-
vironmental/electrical interference. After decontami-
nating the raw data, the input was a matrix of 90 chan-
nels, consisting of the average power spectral density,
averaged together into one second time periods, at
each of the nine channel locations. Power spectral
density was computed for the ten frequency bands of
delta (1-3Hz), theta slow (3-5Hz), theta fast (5-7Hz),
theta total, (3-7Hz) alpha slow (8-10Hz), alpha fast
(10-13Hz), alpha total (8-13Hz), sigma (12-15Hz),
beta (13-30Hz), and gamma (25-40Hz), at each of the
channel locations.
For each instance, we computed the mean, linear
slope, and standard deviation of the entire time-series
of values for each channel. Thus, for inter-task (A1,
A2) comparisons on the fNIRS data, the 350 readings
x 52 channel windows became 2 condition x 8 tri-
als x 156 feature instances and for EEG, the 35 read-
ings x 90 channels window became 2 condition x 8
trials x 180 feature windows. For the task vs. rest
comparisons (B1, B3), the same transformation oc-
curred but the first 150 readings of the task were ex-
tracted, and compared to the 150 readings of resting
data. We fed these feature sets into Matlab’s Statistics
and Machine Learning Toolbox implementation of the
linear kernel support vector machine (SVM) and did
not change default parameters (since the goal was to
discern to what fundamental dimensions the machine
learning algorithms were most sensitive and how that
differed between devices, and not to maximize ma-
chine learning performance). We evaluated each ma-
chine learning separation using 10-fold cross valida-
tion (Refaeilzadeh et al., 2009), training the machine
learning algorithm on all but an approximate tenth of
the data, changing what tenth was omitted from the
dataset and using that set for testing the trained clas-
sifier in ten separate tests. For all tests, evaluation in-
stances were drawn from the same subject and session
as the training instances that drove the machine learn-
ing algorithm. Next, we report on the averaged 10-
fold cross validation classification accuracy for each
test of interest.
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
28

Table 1: SVM Machine Learning Accuracies for Matching
vs. Addition Comparison (A1,A2). m denotes the mean
classification accuracy for all 23 subjects in 10-fold cross-
validation and s refers to the standard deviation. For each
row and column, classification accuracies have been com-
pared in a paired samples t-test, and the p-value is reported.
S EEG fNIRS p
1 m=73%, s=21% m=72%, s=18% 0.7358
2 m = 80%, s = 29% m = 71%, s =17% 0.0525
p 0.2430 0.8900
3.3 Results
3.3.1 Task Comparison: A1,A2
For each session, we made two comparisons for each
device, first distinguishing between the two task con-
ditions and then separating the two tasks. Table 1
shows classification accuracies in cross-fold valida-
tion for the inter-task separation. In the previous sec-
tion, Figure 2 shows how we expect these two tasks
to differ from each other with respect to the workload
and attentional orientation dimensions for the differ-
ent sessions. The addition task presumably poses a
greater burden to the user’s cognitive workload than
the matching task. We have compared the mean clas-
sification accuracies for each of the 23 subjects be-
tween both device and session, and Table 1 reports
the probability that the null hypothesis is true in a
paired sample t-test. There were no significant ef-
fects in these comparisons, but the EEG-based ma-
chine learning algorithms trended towards better per-
formance. The results highlight that both devices can
effectively parse the user along the cognitive work-
load dimension.
3.3.2 Rest Versus Task Comparison: B1,B2
Table 2 shows an identical analysis but for the com-
parison between the two tasks and rest. Since rest
periods were shorter than task periods, we truncated
the task trials so that they only included the first 15
seconds of data. Table 1 indicates that this compari-
son primarily manipulates whether or not the user has
engaged an endogenous or exogenous network. For
fNIRS, machine learning performance in the first ses-
sion (m = 84%, s = 9%) is significantly better than
machine learning performance in the second session
(m = 75%, s = 13%) (p =0.0096, N = 23). Similarly,
for EEG, machine learning performance decays sig-
nificantly from the first session (m = 79%, s = 12%)
to the second session (m = 68%, s = 17%) (p =0.0270,
N = 23).
Table 2: SVM Machine Learning Accuracies for Task vs.
Rest Comparison (B1,B2).
S EEG fNIRS p
1 m = 79%, s = 11% m = 84%, s = 9% 0.11
2 m = 68%, s = 17% m = 75%, s =13% 0.11
p 0.0270* 0.0096**
Figure 5: Channel locations for fNIRS and EEG. For
fNIRS, only highlighted Brodmann Regions are measured.
3.4 Discussion
It is interesting that EEG (m = 76%) outperformed
fNIRS (m = 71%) at separating the mathematical and
image recognition task, which manipulates the user
along the cognitive workload dimension but fNIRS
(m = 80%) outperformed EEG (m = 74%), which ma-
nipulates whether or not the user is engaging a task-
positive or task-negative network. Even though these
differences are not significant, the results are consis-
tent with the hypothesis that these two devices com-
plement each other, covering the other’s weakness.
fNIRS is generally regarded as supporting better spa-
tial resolution whereas EEG has better temporal res-
olution. Since every region in the brain is better de-
scribed as belonging to either a task-positive or task-
negative network and these two networks are anti-
correlated, the fNIRS-based features (which are not as
confused as EEG about the tissue they measure) might
provide the information the SVM needed to discern
the notion of anti-correlated networks, and robustly
predict the user’s state.
In general, as BCIs attempt to portray finer dimen-
sions about the user, fNIRS may prove the better in-
strument for detecting spatial dimensions where dif-
ferent states of the dimension imply the enlistment of
different neuroanatomic space. Beyond predominant
network, an additional spatial dimension might in-
clude parsing the modality of input (spatial vs. motor
vs. auditory) (Glasser et al., 2015). Conversely, EEG
may prove better at extracting information processing
phenomena. Beyond entropy or cognitive workload,
this may include the abstraction (explicit vs. implicit)
(Kahneman, 2011), continuity (static vs. dynamic)
(Baddeley and Hitch, 1974), and direction (top-down
Entropic Brain-computer Interfaces
29

vs. bottom-up) (Pinto et al., 2013) of cerebral data
flows. Investigation into how to induce, portray, and
design for these four other fundamental dimensions is
an area of future research for implicit BCI.
It is also interesting that in both fNIRS and EEG
experiments for the separation rest versus task, classi-
fication accuracy in session 1 reduces significantly in
the second session for both fNIRS (p = 0.0096) and
for EEG (p = 0.0270), but not for the separation be-
tween the two tasks, where classification accuracy is
in fact better in the second session for EEG and ap-
proximately the same for FNIRS. But this is not sur-
prising if the brain is dimensionalized according to
the Bayesian framework. Both fNIRS and EEG mea-
sure brain activation principally at the outer-tips of
the brain, its cortex. In a Bayesian framework, the
outer-tips of the brain’s hardware presumably carry
out computations very high in the information pro-
cessing hierarchy. In the second session, subjects had
already been exposed to the tasks; thus, the second
session cognitive makeup likely included internal rep-
resentations that solved the input-output relations dic-
tated by the task at a more primitive point in the infor-
mation processing hierarchy, reducing the prediction
error and its associated corrective events to penetrate
the higher level regions of the brain under interroga-
tion by the brain sensors.
Specifically, we attribute the relatively increased
difficulty of the SVM to predict transitions between
task and rest in the second session to the greater dif-
ference in system entropy between the resting and
task conditions in the first session than in the sec-
ond session. Since prediction error dictates the entire
operation of a Bayesian brain, this may be another
way of expressing that, in the second session, the user
had absorbed efficient probability distributions for the
task, enabling competing endogenous resting state in-
puts (which draw from the same finite pool of oxygen
supply) to flourish and thus produce a profile that bet-
ter matched the resting state. In simpler terms, the
user’s brains had figured how to efficiently solve the
task in the second day of the experiment, but not how
to efficiently rest. With this interpretation, machine
learning accuracy did not change significantly for the
inter-task comparison since the user had previously
engaged both tasks, making so that task-induced en-
tropy would decrease equally in both conditions.
The difficulty to control for system entropy be-
tween tasks and sessions is a feature not a bug of
brain-computer interfacing so long as it is acknowl-
edged by the designer. By fusing the user dimension
of cognitive workload with system entropy, there is an
opportunity to build a device that uses brain classifi-
cation to manipulate the quality of user experience.
In the next section, we show how to use the dimension
of entropy in a bidirectional brain-computer interface.
4 INTERACTION
The interaction challenge of implicit BCI is to map
machine learning classifications onto system vari-
ables whose values are better set with the knowl-
edge of the user’s cognitive state. There are a va-
riety of such implicit BCI implementations reported
in human-computer interaction venues for fNIRS. In
previous work, we built an engine for adjusting task
difficulty by training machine learning algorithms to
separate fNIRS data pertaining to easy and hard ver-
sions of the n-back task (Afergan et al., 2014a). Once
trained, the support vector machine provided a traf-
fic monitoring simulation predictions about the user’s
workload, which then removed planes from user ju-
risdiction when they were deemed to be overworked,
and added planes when they were underworked or
bored. Users performed better at the task when adap-
tation was driven by changes in their brain as opposed
to randomly. Other implicit BCIs have followed a
similar principle, updating system properties based
on brain activity, and comparing user performance to
constant or random properties (Afergan et al., 2014b;
Afergan et al., 2015; Solovey et al., 2012; Yuksel
et al., 2016).
We refer to a BCI which attempts to alter the
user’s state as a Bidirectional BCI (Hincks et al.,
2017), emphasizing the two-way channel in a system
which outputs physical events which affect the state
of the brain, measures this effect using non-invasive
sensors, and uses this measurement to modify future
interventions in a feedback loop. An Entropic BCI is
a Bidirectional BCI which uses information theoret-
ical models of cognition to interpret data from non-
invasive sensors such as fNIRS and EEG in order to
in real-time dimensionalize users along spectra which
describe how the brain is currently processing infor-
mation (e.g. system entropy, high vs. low cognitive
workload, or attentional orientation). An Entropic
BCI determines how to modulate the flow of infor-
mation to the user based on these classifications in
order to coerce more desirable attentional states. En-
tropic BCIs design for a brain that will retreat into
endogenous processing when the informational ex-
change with the computer is too low or too high, and
they acknowledge that the brain seeks to minimize its
entropy but often relishes high entropy, learning, and
the rich experiences that occur when the brain must
adapt to new input. With current technology, Bidirec-
tional BCIs can use four categories of intervention
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
30
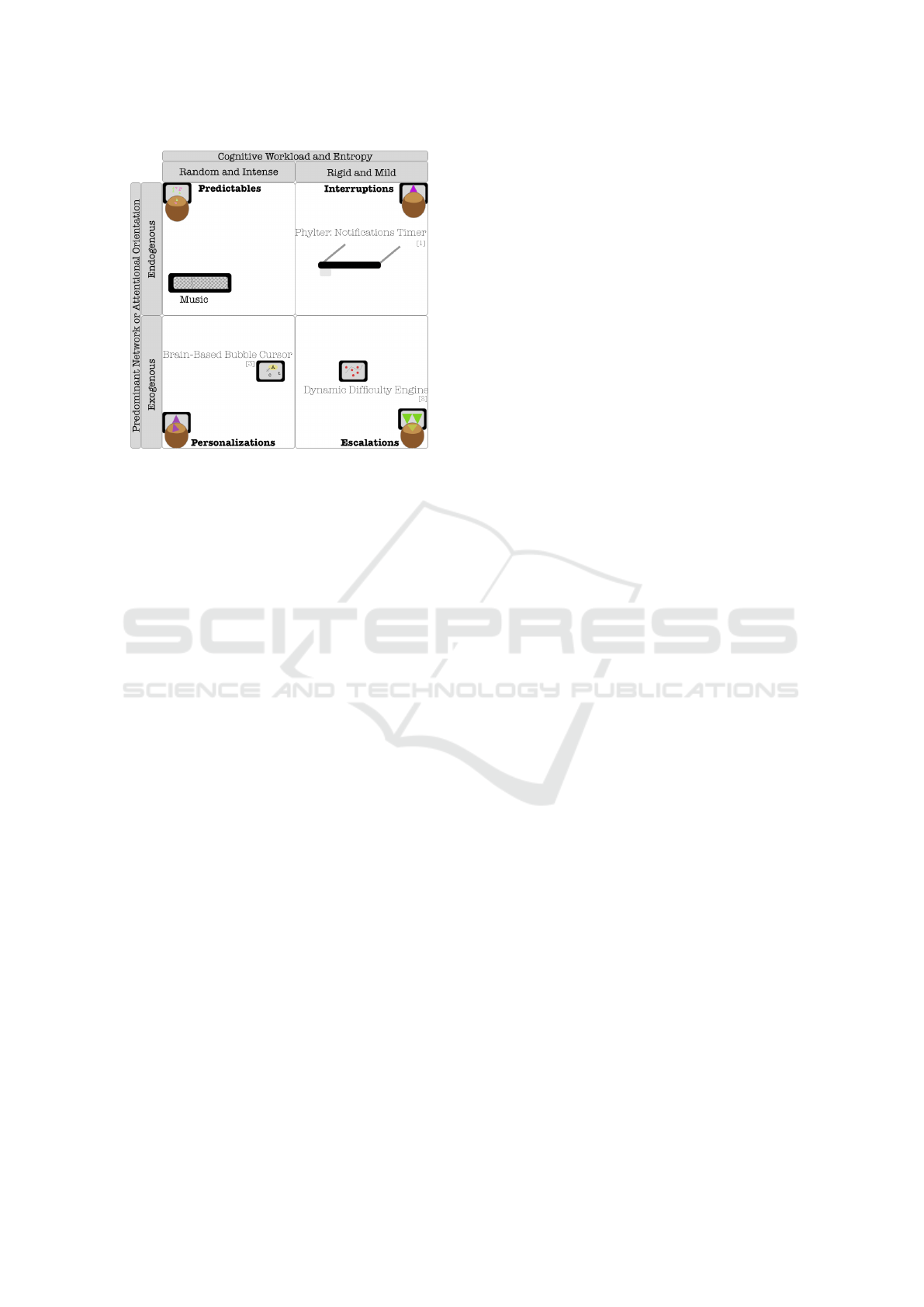
Figure 6: Four methods for implicitly modulating the infor-
mational exchange between the user and computer, and the
state in which it is most suitable to apply them.
for manipulating the user’s state, but new modalities,
e.g. mixed reality and brain stimulation (Hincks et al.,
2017) will expand this arsenal. In previous work, we
have tested prototypes for three of these four cate-
gories (see figure 6), and we reinterpret these proto-
types within an Entropic BCI framework.
Interruptions (e.g. text messages, email, or social
media notifications) can be framed positively as meth-
ods for breaking malproductive rumination provided
that they occur when the user has retreated into a mild
task-negative endogenous state. In previous work, we
built a system that triggered more wearable notifica-
tions when the user was deemed to be in a state of
low cognitive workload, but in the associated experi-
ment, performance measures did not improve dramat-
ically (Afergan et al., 2015). An improved interrup-
tion engine might recognize the predominant network
dimension and time notifications to break endogenous
day-dreaming instead of low cognitive workload.
Escalations increase the difficulty or complexity
of a task, and can make an underworked exogenous
state more engaged. For example, one of our previ-
ous experiments increased the number of unmanned
aerial vehicles under user jurisdiction when the user
was predicted to be underworked, which improved
overall performance in (Afergan et al., 2014a). Other
BCIs that might be framed as escalations include a
musical interface which adapted the challenge of mu-
sical scores (Yuksel et al., 2016) and a simulation
which controlled the degree of automation in a semi-
automated robot (Solovey et al., 2012). In general, if
an HCI task is more strictly exogenous (meaning that
it, like a computer game, aims to instantiate a swift
input-output bond with the user), the more suitable it
is to apply escalations.
Personalizations do not aim to modify the user’s
state, instead aiming to facilitate and design for the
state that has unfolded. For example, we built a brain-
based bubble cursor (Grossman and Balakrishnan,
2005), which modified the ease of selecting graphi-
cal user interface elements with a mouse dependent
on the user’s state (Afergan et al., 2014b). Like es-
calations, adaptations that cater to the user’s current
state can apply to the system’s semantic layer (its in-
ternal values and parameters) or to its syntactic layer
(its inputs and outputs) (Treacy Solovey et al., 2015).
Predictables are brain-adaptive computer output
that convey no essential information to the user, ex-
isting only by virtue of the fact that the brain is a
prediction machine that will faithfully dedicate pro-
cessing and manipulate the user’s state given unpre-
dictable stimuli. We know of no BCI implementa-
tions that would qualify as Predictables but poten-
tially, the world of unexplored ideas has many novel
opportunities, making it uncharted area of BCI re-
search. Music is noise organized by a musician to
occupy a predictive sweet-spot for the listener, where
the parameters of the sound are predictable enough to
enlist top-down circuitry but unpredictable enough to
necessitate adaptation and simulate vivacious experi-
ence. In an Entropic BCI, the sound would need to
modify in response to brain activation. One simple
alteration would be to modify the sound’s origin in 3-
dimensional space. This would function as a system
knob for controlling the user’s implicit computation
since low level regions of the brain would need to pre-
dict and adapt for the moving sound. Potentially, this
phenomenon could be replicated digitally by assign-
ing a unique motion pattern to each constituent instru-
ment or electronic track of a song. That sound could
then be delivered by 3D audio headphones, adapting
the amount of motion based on brain activity.
Beyond audio spatialization, music has many
more opportunities for adapting sound and interfacing
with the brain in an Entropic Brain-Computer Inter-
face since any parameter governing how sound is pro-
duced in a synthesizer could be subject to optimiza-
tion. In practice, such audio brain-computer inter-
faces might proliferate if headphones augmented with
brain sensors (such as the Kickstarter project Mind-
set) became commercially available and if songs were
distributed as programs which adapted based on in-
put instead of as mp3s. The proliferation of adaptive
music depends on musicians writing electronic songs
using the Web Audio API (Rogers, 2012) and open
source javascript software that extends it (Choi and
Berger, 2013; Mann, 2015) since songs written using
web synthesizers can be distributed online for play-
Entropic Brain-computer Interfaces
31

back on any browser, where they could change ele-
ments of a song in response to input as any other web
application. Discovering other predictables is pro-
ductive future work, especially in mixed and virtual
reality scenarios that access more of the user’s senso-
rium. With the Entropic Brain-Computer Interfacing
framework, any system which specified a set of vari-
ables governing the information presented to the user
could be tweaked by a common algorithm for auto-
matically inferring when and how to modify settings
to these variables in order to steer the user into desir-
able states. Such bidirectional BCI UI software would
formalize the notion of user relative information and
customize it over time depending on the user’s cogni-
tive state. The space of interaction between the user
and computer could be encoded in a high level object
referred to as the information space. The information
space consists of objects, chosen to represent the inde-
pendent set of elements that best describes the user’s
current exchange with the computer, as well as a set
of transitions between different versions of that ob-
ject. The novelty of this interface is that both objects
and transitions have an information score, which de-
scribes the average entropy burden the object or tran-
sition poses on the user. These values are initially set
randomly (or pre-calibrated according to expectations
or the cloud), but adjust incrementally (up or down)
based on concurrent brain-based entropy calculations.
Over the long run on many users, we expect these in-
formation scores to be accurate even if the underlying
classification algorithm is not because of regression to
the mean. The set of transitions with low inferred en-
tropy are defined as implicit. Depending somewhat on
the goals of the interaction, a Bayesian implicit BCI
could execute low entropy (implicit) transitions into
an information space with a higher sum to the overall
information score when the user had engaged a mild
resting state network, implying that the cerebration
demanded from the user’s task-positive network was
sufficiently low that the competing, internally rumi-
nating branch of cognition was granted access to the
energy supply and allowed to subtract the user from
external experience. The effectiveness of that inter-
vention would itself be evaluated by how the predic-
tion of the user’s state switched on the task-positive
versus task-negative dimension, internally rewarding
the transitions that succeeded and punishing the one’s
that failed.
5 CONCLUSIONS
In this paper, we have given theoretical and empirical
arguments for why fNIRS and EEG can jointly es-
timate the user’s state along the dimensions of atten-
tional orientation and cognitive workload. We syn-
onymize cognitive workload with entropy in order to
make a bridge between implicit BCI and a growing
Bayesian literature that is positing an equivalence be-
tween entropy and the introspectable temperature of
experience (Carhart-Harris et al., 2015). We sketch
four interface designs for pulling the user into high
temperature externally oriented flow states based on
brain activation, and sketch algorithm for how these
interventions might improve automatically if the user
interface formalizes, adjusts and adapts user relative
information. We expect BCI to mature alongside vir-
tual, augmented, and mixed reality technology. In
due time, the computer output under the jurisdiction
of mixed BCI technology will then extend beyond
merely notifications and other system settings to the
complete sensorium molding the brain’s state. With
concurrent measures of user entropy and attentional
orientation, it may be possible to customize such a
virtual reality so that it interactively creates arrange-
ments of sensory information that maximize its user’s
experience and joy. A working implementation of this
technology would warrant a careful ethical consider-
ation of how to judiciously wield this new power over
the brain.
ACKNOWLEDGEMENTS
We thank Beste Yuksel, Daniel Afergan, Evan Peck,
Erin Solovey, Leanne Hirshfield, Tomoki Shibata,
Anzu Hakone, Ronna ten Brink, Min Bu, Sonal Chat-
ter, Yan Huo, Eun Youb Lee, Bushra Alkadhi, Feiyu
Lu, Mary Skitka, Nick Sempere, Maya DeBellis, Tal
August, James Carney, Nik Liolios, Beibei Du, and
Calvin Liang who are students and alumni of the
HCI group at Tufts. We thank Remco Chang, Erika
Hussey, Tad Brunye, Sergio Fantini and Angelo Sas-
saroli from Tufts University. We thank Stuart Hirsh-
field from Hamilton College. We thank Google Inc.
for support of this research. Vir V. Phoha was sup-
ported in part by National Science Foundation Award
SaTC Number: 1527795.
REFERENCES
Afergan, D., Hincks, S. W., Shibata, T., and Jacob, R. J.
(2015). Phylter: a system for modulating notifications
in wearables using physiological sensing. In Inter-
national Conference on Augmented Cognition, pages
167–177. Springer.
Afergan, D., Peck, E. M., Solovey, E. T., Jenkins, A.,
Hincks, S. W., Brown, E. T., Chang, R., and Jacob,
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
32

R. J. (2014a). Dynamic difficulty using brain metrics
of workload. In Proceedings of the 32nd annual ACM
conference on Human factors in computing systems,
pages 3797–3806. ACM.
Afergan, D., Shibata, T., Hincks, S. W., Peck, E. M., Yuksel,
B. F., Chang, R., and Jacob, R. J. (2014b). Brain-
based target expansion. In Proceedings of the 27th
annual ACM symposium on User interface software
and technology, pages 583–593. ACM.
Baddeley, A. D. and Hitch, G. (1974). Working memory.
Psychology of learning and motivation, 8:47–89.
Berka, C., Levendowski, D. J., Cvetinovic, M. M., Petro-
vic, M. M., Davis, G., Lumicao, M. N., Zivkovic,
V. T., Popovic, M. V., and Olmstead, R. (2004). Real-
time analysis of eeg indexes of alertness, cognition,
and memory acquired with a wireless eeg headset. In-
ternational Journal of Human-Computer Interaction,
17(2):151–170.
Carhart-Harris, R. L., Leech, R., Hellyer, P. J., Shanahan,
M., Feilding, A., Tagliazucchi, E., Chialvo, D. R., and
Nutt, D. (2015). The entropic brain: a theory of con-
scious states informed by neuroimaging research with
psychedelic drugs. Psychoanalytical neuroscience:
Exploring psychoanalytic concepts with neuroscien-
tific methods, page 140.
Choi, H. and Berger, J. (2013). Waax: Web audio api ex-
tension. In NIME, page 499502.
Clark, A. (2013). Whatever next? predictive brains, situated
agents, and the future of cognitive science. Behavioral
and Brain Sciences, 36(03):181–204.
Csikszentmihalyi, M. (1996). Flow and the psychology of
discovery and invention. New Yprk: Harper Collins.
Fairclough, S. (1993). Psychophysiological measures of
workload and stress. Driving future vehicles, pages
377–390.
Fairclough, S. H., Moores, L. J., Ewing, K. C., and Roberts,
J. (2009). Measuring task engagement as an input to
physiological computing. In 2009 3rd International
Conference on Affective Computing and Intelligent In-
teraction and Workshops, pages 1–9. IEEE.
Fairclough, S. H., Venables, L., and Tattersall, A. (2005).
The influence of task demand and learning on the psy-
chophysiological response. International Journal of
Psychophysiology, 56(2):171–184.
Ferrari, M. and Quaresima, V. (2012). A brief review on
the history of human functional near-infrared spec-
troscopy (fnirs) development and fields of application.
Neuroimage, 63(2):921–935.
Friston, K. (2010). The free-energy principle: a uni-
fied brain theory? Nature Reviews Neuroscience,
11(2):127–138.
Gevins, A. and Smith, M. E. (2003). Neurophysiologi-
cal measures of cognitive workload during human-
computer interaction. Theoretical Issues in Er-
gonomics Science, 4(1-2):113–131.
Girouard, A., Solovey, E. T., Hirshfield, L. M., Chauncey,
K., Sassaroli, A., Fantini, S., and Jacob, R. J.
(2009). Distinguishing difficulty levels with non-
invasive brain activity measurements. In IFIP Con-
ference on Human-Computer Interaction, pages 440–
452. Springer.
Glasser, M., Coalson, T., Robinson, E., Hacker, C., Harwell,
J., Yacoub, E., Ugurbil, K., Anderson, J., Beckmann,
C., Jenkinson, M., et al. (2015). A multi-modal par-
cellation of human cerebral cortex. Nature.
Grossman, T. and Balakrishnan, R. (2005). The bubble cur-
sor: enhancing target acquisition by dynamic resizing
of the cursor’s activation area. In Proceedings of the
SIGCHI conference on Human factors in computing
systems, pages 281–290. ACM.
Guger, C., Edlinger, G., Harkam, W., Niedermayer, I., and
Pfurtscheller, G. (2003). How many people are able to
operate an eeg-based brain-computer interface (bci)?
IEEE transactions on neural systems and rehabilita-
tion engineering, 11(2):145–147.
Hincks, S. W., Afergan, D., and Jacob, R. J. (2016). Us-
ing fnirs for real-time cognitive workload assessment.
In International Conference on Augmented Cognition,
pages 198–208. Springer.
Hincks, S. W., Debellis, M., Lee, E. Y., ten Brink, R.,
and Jacob, R. J. (2017). Towards bidirectional brain-
computer interfaces that use fnirs and tdcs. In PhyCS.
Hirshfield, L. M., Gulotta, R., Hirshfield, S., Hincks, S.,
Russell, M., Ward, R., Williams, T., and Jacob, R.
(2011). This is your brain on interfaces: enhancing
usability testing with functional near-infrared spec-
troscopy. In Proceedings of the SIGCHI Conference
on Human Factors in Computing Systems, pages 373–
382. ACM.
Hirshfield, L. M., Solovey, E. T., Girouard, A., Kebinger,
J., Jacob, R. J., Sassaroli, A., and Fantini, S. (2009).
Brain measurement for usability testing and adaptive
interfaces: an example of uncovering syntactic work-
load with functional near infrared spectroscopy. In
Proceedings of the SIGCHI Conference on Human
Factors in Computing Systems, pages 2185–2194.
ACM.
Hoffmann, S. and Falkenstein, M. (2008). The correction
of eye blink artefacts in the eeg: a comparison of two
prominent methods. PLoS One, 3(8):e3004.
Homan, R. W., Herman, J., and Purdy, P. (1987). Cere-
bral location of international 10–20 system electrode
placement. Electroencephalography and clinical neu-
rophysiology, 66(4):376–382.
Kahneman, D. (2011). Thinking, fast and slow. Macmillan.
Killingsworth, M. A. and Gilbert, D. T. (2010). A
wandering mind is an unhappy mind. Science,
330(6006):932–932.
Maior, H. A., Pike, M., Sharples, S., and Wilson, M. L.
(2015). Examining the reliability of using fnirs in
realistic hci settings for spatial and verbal tasks. In
Proceedings of the 33rd Annual ACM Conference on
Human Factors in Computing Systems, pages 3039–
3042. ACM.
Mann, Y. (2015). Interactive music with tone.js. In Proceed-
ings of the 1st annual Web Audio Conference. Citeseer.
Perfors, A., Tenenbaum, J. B., Griffiths, T. L., and Xu, F.
(2011). A tutorial introduction to bayesian models of
cognitive development. Cognition, 120(3):302–321.
Entropic Brain-computer Interfaces
33

Pfurtscheller, G., Allison, B. Z., Bauernfeind, G., Brunner,
C., Solis Escalante, T., Scherer, R., Zander, T. O.,
Mueller-Putz, G., Neuper, C., and Birbaumer, N.
(2010). The hybrid bci. Frontiers in neuroscience,
4:3.
Picard, R. W. (1997). Affective computing, volume 252.
MIT press Cambridge.
Pinto, Y., van der Leij, A. R., Sligte, I. G., Lamme,
V. A., and Scholte, H. S. (2013). Bottom-up and top-
down attention are independent. Journal of Vision,
13(3):16–16.
Poel, M., Nijboer, F., van den Broek, E. L., Fairclough,
S., and Nijholt, A. (2012). Brain computer interfaces
as intelligent sensors for enhancing human-computer
interaction. In Proceedings of the 14th ACM inter-
national conference on Multimodal interaction, pages
379–382. ACM.
Raichle, M. E. (2010). The brain’s dark energy. Scientific
American, 302(3):44–49.
Raichle, M. E., MacLeod, A. M., Snyder, A. Z., Powers,
W. J., Gusnard, D. A., and Shulman, G. L. (2001). A
default mode of brain function. Proceedings of the
National Academy of Sciences, 98(2):676–682.
Refaeilzadeh, P., Tang, L., and Liu, H. (2009). Cross-
validation. In Encyclopedia of database systems,
pages 532–538. Springer.
Rogers, C. (2012). Web audio api. s Draft [online specifi-
cation], Version, 1.
Solovey, E., Schermerhorn, P., Scheutz, M., Sassaroli, A.,
Fantini, S., and Jacob, R. (2012). Brainput: enhanc-
ing interactive systems with streaming fnirs brain in-
put. In Proceedings of the SIGCHI conference on
Human Factors in Computing Systems, pages 2193–
2202. ACM.
Solovey, E. T., Girouard, A., Chauncey, K., Hirshfield,
L. M., Sassaroli, A., Zheng, F., Fantini, S., and Jacob,
R. J. (2009). Using fnirs brain sensing in realistic hci
settings: experiments and guidelines. In Proceedings
of the 22nd annual ACM symposium on User interface
software and technology, pages 157–166. ACM.
Teplan, M. (2002). Fundamentals of eeg measurement.
Measurement science review, 2(2):1–11.
Treacy Solovey, E., Afergan, D., Peck, E. M., Hincks, S. W.,
and Jacob, R. J. (2015). Designing implicit interfaces
for physiological computing: guidelines and lessons
learned using fnirs. ACM Transactions on Computer-
Human Interaction (TOCHI), 21(6):35.
Venables, L. and Fairclough, S. H. (2009). The influence
of performance feedback on goal-setting and mental
effort regulation. Motivation and Emotion, 33(1):63–
74.
Yuksel, B. F., Oleson, K. B., Harrison, L., Peck, E. M.,
Afergan, D., Chang, R., and Jacob, R. J. (2016). Learn
piano with bach: An adaptive learning interface that
adjusts task difficulty based on brain state. In Proceed-
ings of the 2016 CHI Conference on Human Factors
in Computing Systems, pages 5372–5384. ACM.
Zander, T. O., Br
¨
onstrup, J., Lorenz, R., and Krol, L. R.
(2014). Towards bci-based implicit control in human–
computer interaction. In Advances in Physiological
Computing, pages 67–90. Springer.
Zander, T. O., Kothe, C., Jatzev, S., and Gaertner, M.
(2010). Enhancing human-computer interaction with
input from active and passive brain-computer inter-
faces. In Brain-computer interfaces, pages 181–199.
Springer.
PhyCS 2017 - 4th International Conference on Physiological Computing Systems
34
