Evaluating the Efficiency of Blockchains in IoT with Simulations
Jari Kreku, Visa Vallivaara, Kimmo Halunen and Jani Suomalainen
VTT Techical Recearch Centre of Finland, Finland
Keywords:
Internet of Things, Trust, Blockchain, Efficiency, Simulation.
Abstract:
As blockchain technology has gained popularity in many different application areas, there is a need to have
tools for prototyping and evaluating various ways of applying blockchains. One interesting venue where this
type of evaluation is very important is Internet of Things (IoT). In IoT scenarios the efficiency in energy
consumption and also the timeliness of the transactions on the blockchain are important variables to consider.
We present a way to apply an existing simulation tool - ABSOLUT - in evaluating blockchain implementations
on embedded devices. We show the results of simulations on Raspberry Pi and Nvidia Jetson Tk1 platforms
and compare the latter to actual executions. Our tool receives a fairly small error (9% on the average) and we
see it as a great way to help in deciding the parameters for different blockchain implementations.
1 INTRODUCTION
The invention and success of Bitcoin (Nakamoto,
2008) has brought blockchain technology to the fore-
front of many digitalisation efforts. Blockchains can
be seen as distributed, decentralised ledgers, that can
keep track of any type of transactions. As the data
of every transaction is tracked securely with crypto-
graphic guarantees, an adversary cannot afterwards
alter transactions on the blockchain or claim that they
did not happen. Also the timeframe of a transaction
can be traced in the blockchain. As such, they are a
great tool in building trust between distrusting parties
communicating over untrusted or unreliable channels.
The Bitcoin blockchain is only a single manife-
station of this technology and currently a lot of re-
search is improving both the theoretical foundations
and the implementations of blockchains. The techno-
logy is young and there are many different approaches
that can be utilized. The choices are related to the
permissions needed to operate on the blockchain, the
contents of the possible transactions and the way the
proofs are constructed. For example, one could use
Proof of Work (PoW) as the Bitcoin uses or more re-
cent ideas such as Proof of Stake or Proof of Space or
a combination of these as the consensus mechanism.
Because blockchains can be used in a number of
different ways and there are many parameters in the
implementation that affect the security, performance
and usability of the system, it is difficult to choose an
optimal configuration for one. This is especially true
in the Internet of Things (IoT) setting, where a huge
Blockchain network
Block Block Block Block Block Block
Alters
Transaction
Transaction
Transaction
Reveals
altering
Internet of
Things
Transaction
Record transactions
Transaction
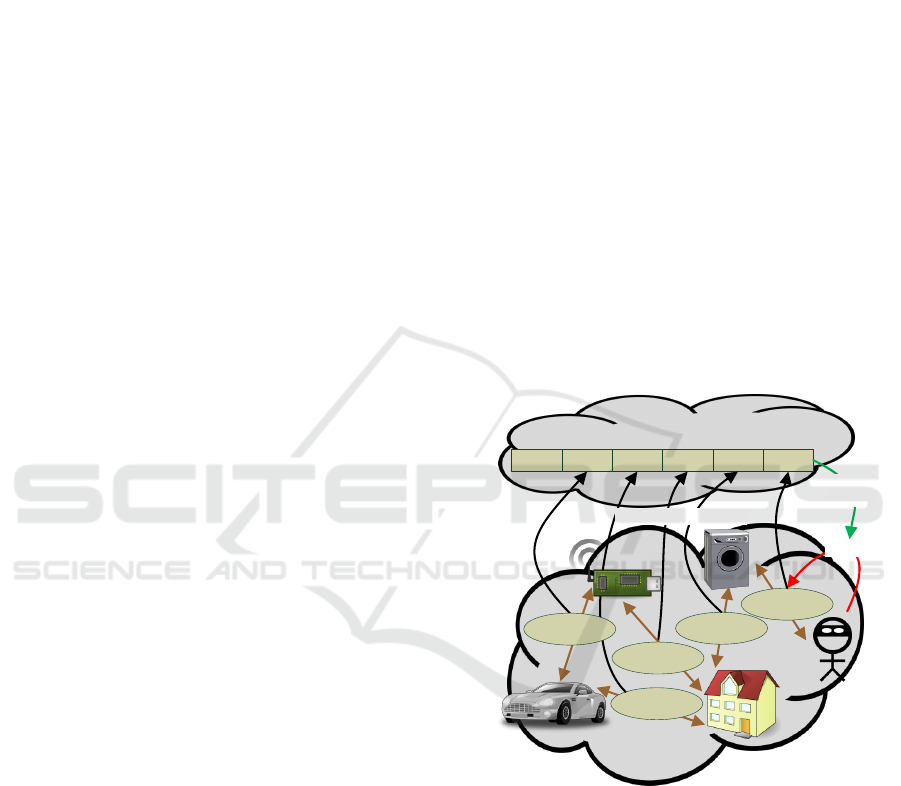
Figure 1: Blockchains for the Internet of Things - Distri-
buted tracking of transactions increases trust by enabling
detection of later alterations.
amount of small and resource constrained devices are
connected to the Internet. It would be valuable to be
able to test and tune the parameters before deploying
a blockchain implementation as the update of these
systems can be difficult and expensive if not outright
impossible. Figure 1 shows a high-level visualisation
of a possible blockchain IoT system.
In this paper, we demonstrate how simulation
tools can be used to find out the limits and possibili-
ties of blockchain implementations. We adapt VTT’s
ABSOLUT (Kreku, 2012) simulation tool to test dif-
216
Kreku, J., Vallivaara, V., Halunen, K. and Suomalainen, J.
Evaluating the Efficiency of Blockchains in IoT with Simulations.
DOI: 10.5220/0006240502160223
In Proceedings of the 2nd International Conference on Internet of Things, Big Data and Security (IoTBDS 2017), pages 216-223
ISBN: 978-989-758-245-5
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ferent blockchain alternatives in some use cases. This
helps in prototyping blockchains in different environ-
ments and finding out which types of instantiations
are feasible. It can also be used to find optimal perfor-
mance (for some parameters) in constrained devices.
The paper is organised as follows: Section 2 des-
cribes briefly the background on blockchains and si-
mulation tools. Then we present the methods and set-
tings used. The fourth section contains the results and
analysis. Finally, there are discussions, conclusion
and problems for future work.
2 BACKGROUND
Our work combines results from two different fields,
blockchains and simulation. We briefly present the
relevant background work on both of these topics.
2.1 Blockchains
The blockchain technology is the driving force be-
hind Bitcoin – the most successful virtual currency to
date. The power of blockchain is in the combination
of several ideas that in themselves are not necessary
novel, but together provide a great tool for building
completely new systems. A blockchain implementa-
tion consists of two kinds of records: transactions and
blocks. (Franco, Pedro, 2014) A transaction repre-
sents an operation or agreement between two parties.
Transaction records could e.g. describe money trans-
fers or be used to track products that traverse through
their supply chains or the ownership of stock.
The blockchain is a decentralized digital ledger
that records transactions between computers so that
these cannot be altered retrospectively. The ledger
consists of blocks that hold batches of valid transacti-
ons. Blocks are added to the ledger by miners. The
mining process is made artificially hard in order to
enable the blockchain community to securely build
a common consensus on accepted transactions. The
blockchains can be easily parsed by suitable software
to extract relevant information of transactions.
Blockchains can be closed to some permissioned
parties or open for everyone to connect to the net-
work, send new transactions to it, verify transactions
and create new blocks (permissionless). The design of
the Bitcoin blockchain is permissionless and has been
the inspiration for other cryptocurrencies and distri-
buted databases. Like many other peer-to-peer appli-
cations, these platforms rely on decentralized archi-
tectures to build and maintain network applications
operated by the community for the community.
The concept of Proof of Work (PoW) first appea-
red with the aim to combat junk mail (Dwork and
Naor, 1993). The idea is to require a user to solve a
moderately hard computational puzzle to gain access
to the resource. In blockchains, PoW is used to define
the average time in which blocks are being generated.
The main idea in Bitcoin’s PoW is that each miner
calculates a double SHA-256 hash of the block hea-
der. The goal here is to find a hash that contains a
certain number of leading zeroes. This number is de-
termined by the protocol’s difficulty, which is adjus-
ted every 2016 blocks, based on the number of blocks
solved and the expected time it should have taken to
solve this number of blocks. In Bitcoin, the difficulty
is set so that on average every 10 minutes a block is
generated by the network (Nakamoto, 2008).
2.1.1 Ethereum
Ethereum’s (Wood, 2014) smart contracts are another
example of the power of the blockchain. These con-
tracts are programmed to be automatically fulfilled
when preconditions are settled. A basic smart con-
tract can hold a contributor’s money until a given date
or goal is reached. Depending on the outcome, the
funds will be released or returned to the contributors.
The Ethereum Frontier network uses a PoW ba-
sed consensus algorithm Ethash. The reason for con-
structing a new PoW instead of using an existing one
was to tackle the problem of mining centralisation,
where a small group miners acquire a large amount of
power of the network. (Etherium Project, 2016)
Ethash (Etherium Project, 2016) is based on Dag-
ger Hashimoto algorithm and has an objective of
being quickly verifiable with a low memory overhead
by light clients, and very quickly mined by using a
large amount of memory. Hence, the time of mining
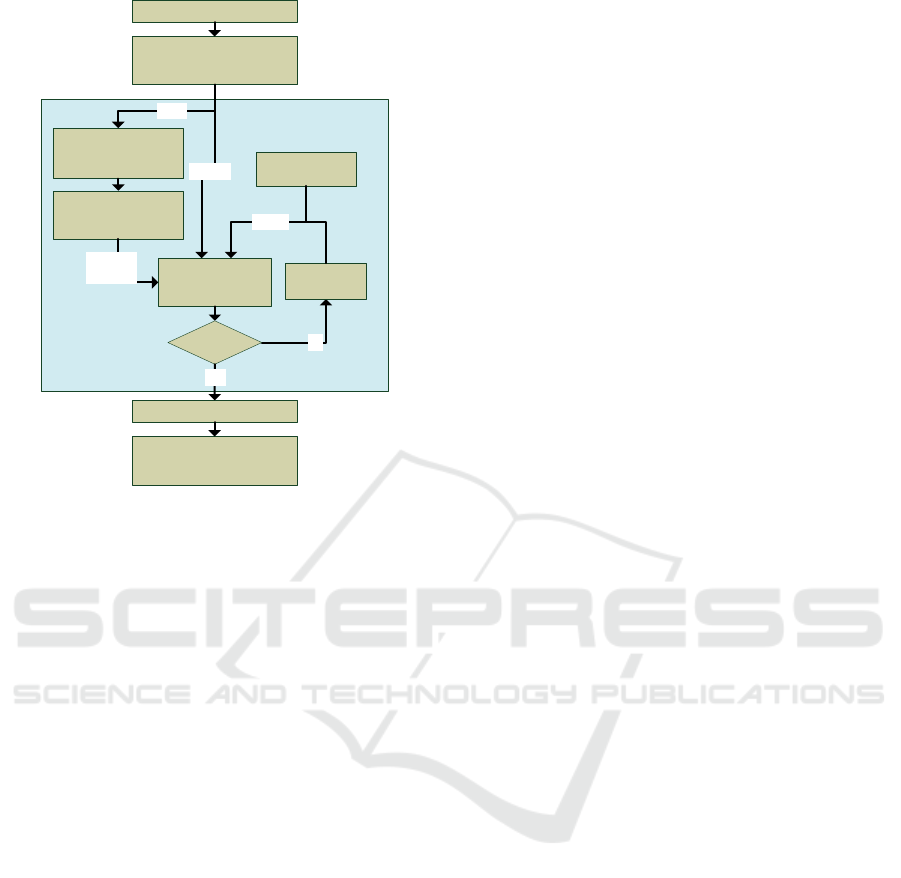
is bound to RAM access speed. The main phases of
the mining algorithm (Figure 2) are the following:
1. Data sets are generated for verification and for mi-
ning. Data sets are derived with hash function
(first hashing the block headers to get a seed, then
hashing the seed to get a cache and finally hashing
the cache to get a big data set). Data sets are ge-
nerated once at the beginning of mining operati-
ons and updated only once in every 30000 blocks.
Hence, generating data does not significantly af-
fect the efficiency of the Ethereum blockchain.
2. The main mining function combines and hashes
(in Hashimoto-style) a random nonce, a hash of
the block header and random slices from the data
set. The function loops until a value that satisfies
the difficulty threshold is reached (and the PoW is
found). For each round the nonce is incremented
Evaluating the Efficiency of Blockchains in IoT with Simulations
217
Mining (Ethash) Algorithm
Generate block header
(transaction list, state, id,
difficulty)
Compute 16MB
pseudorandom
cache using SHA-3
header
Generate
pseudorandom
1GB dataset
Hashimoto-like
algorithm based
on SHA-3
Random
slices
Proof-of-Work
no
Increment
nonce
Perform transaction
Submit the block with
proof-of-work to the
network
Select
random nonce
nonce
seed
result <
threshold
yes
Figure 2: Phases in the Ethereum mining process.
and new slices are fetched from the memory. The
main burden of work in Ethash is in this phase.
3. A block with the PoW is submitted to the network.
The amount of hashing rounds is adjusted dynami-
cally. The number of rounds depends on the difficulty
parameter, which in turn depends on the frequency of
blocks processed by the Ethereum network. Conse-
quently, the work amount and efficiency of Ethereum
mining varies slightly through time.
2.1.2 Efficiency of Blockchains
Optimization of blockchain implementations, esp.
cryptocurrencies, has been driven by economic incen-
tives and there are many implementations and opti-
mizations for different platforms. Hashing speed and
energy consumption of these have been explored e.g.
by the Bitcoin community (Bitcoin community, 2016;
Bitcoin community, 2015). Efficiency of blockchains
has also been researched by (O’Dwyer and Malone,
2014), who analyzed the economic profitability of
Bitcoin mining, and (Ala-Peijari, 2014), who perfor-
med a comparative study of performance and energy
efficiency of Bitcoin mining on various devices.
The results indicate that Bitcoin-optimised Appli-
cation Specific Integrated Circuit (ASIC) implemen-
tations may achieve over 1000x better efficiency than
the mining based on off-the-self desktop CPUs or
GPUs. For instance, where regular desktop CPUs and
Rasperry Pi were able to achieve efficiency of 0.02
and 0.04 million hashes per joule, respectively, a dedi-
cated ASIC was able to calculate 322.58 million has-
hes per joule. The efficiency of blockchain implemen-
tations was evaluated using hardware test-beds, where
blockchains were executed. However, such approa-
ches are inflexible when the software implementation
should be evaluated for large amount of different plat-
forms or when new hardware is designed.
A simulation framework for quantifying and com-
paring the security and performance of different PoW
blockchains was introduced by (Gervais et al., 2016).
The simulator modeled and evaluated basic block-
chain operations and parameters such as block size,
block interval and throughput and also enabled mo-
deling of adversarial actions such as double spending
and selfish mining. Their analysis covered Bitcon, Li-
tecoin, Dogecoin, as well as Ethereum. The simulator
did not model differences and impacts of hardware
platforms for the performance of blockchains.
Ethereum’s mining algorithm - Ethash - is ba-
sed on running multiple rounds of Keccak-256 and
Keccak-512 hash algorithms, which are (early) vari-
ants of SHA-3 standard (NIST, 2015). One of the de-
velopment criteria for the SHA-3 was the suitability
for constrained devices. Hence, the efficiency of the
algorithm has been studied on different hardware plat-
forms for IoT, including desktop/laptops running x86,
amd64, or ppc32 processors (Bernstein and Lange,
2012), FPGA (Jungk, 2012; Kaps et al., 2012; Latif
et al., 2012), ASIC (Guo et al., 2012), RFID (Pessl
and Hutter, 2013), and ARM (Schwabe et al., 2012;
Bernstein and Lange, 2012). The results highlight that
with customised and optimized hardware (FPGAs and
ASICs) it is easier to achieve efficiency than with
more generic off-the-shelf processors. In addition to
hardware platform, the hashing performance and time
depends also on the length of the hashed message.
2.2 Simulation
Simulation-based performance and / or power con-
sumption evaluation approaches can be divided into
two main categories: full system simulators and sin-
gle component (e.g. processor, memory) simulators.
The full system simulators can be further divided into
virtual system approaches based on abstract models
of both applications and execution platforms, virtual
platform approaches, which simulate executable ap-
plications in functional platform models and virtual
prototype approaches, which execute real applicati-
ons in a detailed, low-level platform model.
Both virtual platforms and virtual prototypes are
instruction accurate, but virtual platforms are typi-
cally coarsely timed and fast to simulate, whereas vir-
IoTBDS 2017 - 2nd International Conference on Internet of Things, Big Data and Security
218

tual prototypes are highly accurate but require a lot
of modelling effort and are slow to simulate. Virtual
systems are not instruction accurate but facilitate low
modelling effort and high enough precision for early
evaluation and design space exploration.
Gem5 (Binkert et al., 2011) is an instruction accu-
rate simulation system with configurable component
models and speed / accuracy tradeoff capability. No-
minal simulation speed varies between 300 KIPS and
3 MIPS. SimuBoost (Rittinghaus et al., 2013) is a
method for the parallelization of full system simu-
lation based on a virtual platform. Sniper (Heirman
et al., 2012) is a parallel multi-core simulator for the
performance and power consumption of x86 architec-
tures. It can achieve up to 2 MIPS simulation perfor-
mance with at most 25% error. VirtualSoC (Bortolotti
et al., 2013) is a method for the full system simulation
of a general purpose CPU and a many-core HW acce-
lerator using QEMU and SystemC. Virtual system ba-
sed approaches have been proposed by (Van Stralen
and Pimentel, 2010) and (Posadas et al., 2011). COS-
SIM (Papaefstathiou et al., 2015) is a framework for
the full system simulation of networking and proces-
sing parts of cyber-physical systems (CPS). It is able
to evaluate the performance, power-consumption and
security aspects of CPS systems and proposes har-
dware acceleration with FPGAs to achieve rapid eva-
luation.
3 MODELLING APPROACH
The ABSOLUT approach (Kreku, 2012) is intended
for the evaluation of computer system performance
and power consumption in the early phases of design.
ABSOLUT uses virtual system modelling, where ab-
stract workload models of applications are simulated
on top of performance capacity models of the compu-
ting platform (Figure 3). The workload models have
basic block, function, process and application layers
(Kreku, 2012) and are implemented in SystemC
1
. The
basic block layer of the workload models contains ab-
stract instructions read, write and execute and reque-
sts for higher-level services such as video decoding or
DMA transfer. Tools exist for automatic generation of
workload models from traces, measurements, source
code or application binaries.
The platform models are also layered and semi-
automatically generated from library components and
text-based platform description and configuration fi-
les. The platform description defines, which compo-
nents are instantiated from the library and their con-
1
See http://accellera.org for details
Workload
modelling
Capacity
modelling
Allocation
Simulation
Source code
Traces
Measurements
Algorithm
description
Platform
documentation
Models of
applications
Model of
execution
platform
System
model
Simulation
results
Figure 3: Y-chart diagram of the ABSOLUT performance
evaluation approach.
nections, whereas the configuration file sets up the pa-
rameters like clock frequency. The model library in-
cludes capacity models of processing unit, intercon-
nect, memory and hardware accelerator components
implemented in transaction-level SystemC.
The processing unit models consume the abstract
instructions from the workload models. They esti-
mate the time needed to execute the instructions and
calculate the resulting utilisation and power consump-
tion. They utilise other components of the system
through transactions. High-level services are reque-
sted from an OS model and processed by the service
provider, which typically is a HW accelerator or a
workload model incorporated in the platform.
The modelling approach enables early evaluation,
since mature hardware or software is not required for
modelling and simulation. ABSOLUT is able to esti-
mate the execution time of an application or a part of
an application, the utilisation of the modelled compo-
nents in the execution platform and the system-level
power / energy consumption of the use case.
3.1 Toolset
The ABSOLUT toolset consists of the following: AB-
SINTH is the workload model generator of ABSO-
LUT. There are multiple versions of ABSINTH for
modelling from source code (Kreku et al., 2010), ap-
plication binaries and execution traces. BEER is the
simulator based on the SystemC simulation kernel. It
is also responsible for loading the models and wri-
ting the simulation results to data files. COGNAC
is the platform model generation and configuration
tool, which creates the system model from the com-
ponent models in the model library and the text-based
platform description and configuration files. Finally,
VODKA is used for the visualisation of component
Evaluating the Efficiency of Blockchains in IoT with Simulations
219

Table 1: Blockchain parameters.
Parameter Value
Algorithm PoW (Ethash)
Blockchain software geth version 1.4
Total node amount (n) 1..64
Mining node amount (k) 1..64
Blocks to mine 100..400
difficulty 0x4000
gasLimit 0xffffffff
utilisation and power and energy consumption as a
function of time after the simulation has completed.
The average error of the performance estimates
produced by ABSOLUT compared to measurements
has been 12%. Simulation speed depends on the host
processing capacity and the complexity of the system
model. Typically, the simulation performance of AB-
SOLUT has been around 30 to 300 MOPS.
3.2 Target Blockchains and Hardware
We used Ethereum as the blockchain implementation.
Table 1 displays the essential parameters of our con-
figuration. The go-language version of Ethereum,
geth, was used as the application SW. The total num-
ber of nodes, n, and the number of mining nodes, k,
was varied from 1 to 64. The difficulty and gasLimit
parameters were set up in the genesis.json file used
to initialise each node. The higher the difficulty, the
more processing is needed to find a valid new block.
Two alternative execution platforms were selected
for evaluation: Raspberry Pi 2
2
is a cheap general
purpose computing platform. It contains 4 low-power
ARM Cortex-A7 CPU cores at 900 MHz clock fre-
quency, 1 GB of SDRAM, an ethernet port and ot-
her peripherals. Nvidia Jetson TK1
3
development bo-
ard is based on the Tegra K1 System-on-Chip with 4
high-performance ARM Cortex-A15 cores and 1 low-
power ARM core. Tegra’s GPU was not used. The ef-
fect of network’s capabilities were evaluated by using
different latency values (from 1 ms to 1000 ms).
4 RESULTS & ANALYSIS
The Ethereum full node – geth application – was mo-
delled using the ABSINTH workload model genera-
tor. One set of models was generated for each pair
of total nodes n and mining nodes k (section 3.2) re-
sulting in a total of 15 sets of workload models.
2
https://www.raspberrypi.org
3
http://www.nvidia.com/object/jetson-tk1-embedded-
dev-kit.html
The workload models were allocated on the four
CPU cores in the ABSOLUT capacity models of the
Raspberry Pi 2 and Jetson TK1 execution platforms.
The same workload models were used on both plat-
forms. The resulting system models were simula-
ted and the execution time, average power and total
energy needed to mine 400 blocks was extracted.
4.1 Performance and Power
The results from the performance and power con-
sumption simulations are listed in Table 2. These si-
mulations assume that the network latency between
the nodes is minimal (<1 ms). Both the total number
of nodes and the number of mining nodes varied from
1 to 16 on both platforms. The results indicate that
while the execution time to mine 400 blocks decrea-
ses as the number of mining nodes is increased, the
total energy consumption is the smallest with only 1
node. Thus, it is best to use the least number of nodes
with which the performance requirements are satis-
fied.
Comparison of the platforms reveals that e.g. one
Jetson TK1 is able to achieve a bit better performance
than four Raspberry Pi 2 nodes – with a higher power
but smaller energy consumption. The Pi 2 platform
is a much better choice for the non-mining nodes as
their utilisation is low and average power is close to
idle power. Even the Pi 2 has plenty of processing
capacity left to collect sensor data, for example.
When the number of mining nodes is increased,
the average power of the mining nodes decreases as
the parallel part of the program execution becomes
shorter. The inverse happens to the non-mining nodes
due to messages of new blocks appearing more often.
4.2 Effect of Network Latency
The results in section 4.1 show that the increase in
mining performance is almost linear as the number of
nodes is increased – at least when at most 16 nodes
is used. However, those simulations assumed that the
network latency between the nodes is minimal. When
the latency is increased, it will take more time before
the mining nodes become aware of new blocks and
PoWs produced by the other miners.
To analyse the effect of network latency, another
set of simulations was performed. Table 3 depicts,
how the increasing network latency affects the execu-
tion time, power and energy required to mine the 400
blocks with a given number of nodes.
The simulations show that the network latency
does not affect the mining performance considerably
as long as the it stays below 100 ms. After 300-400
IoTBDS 2017 - 2nd International Conference on Internet of Things, Big Data and Security
220
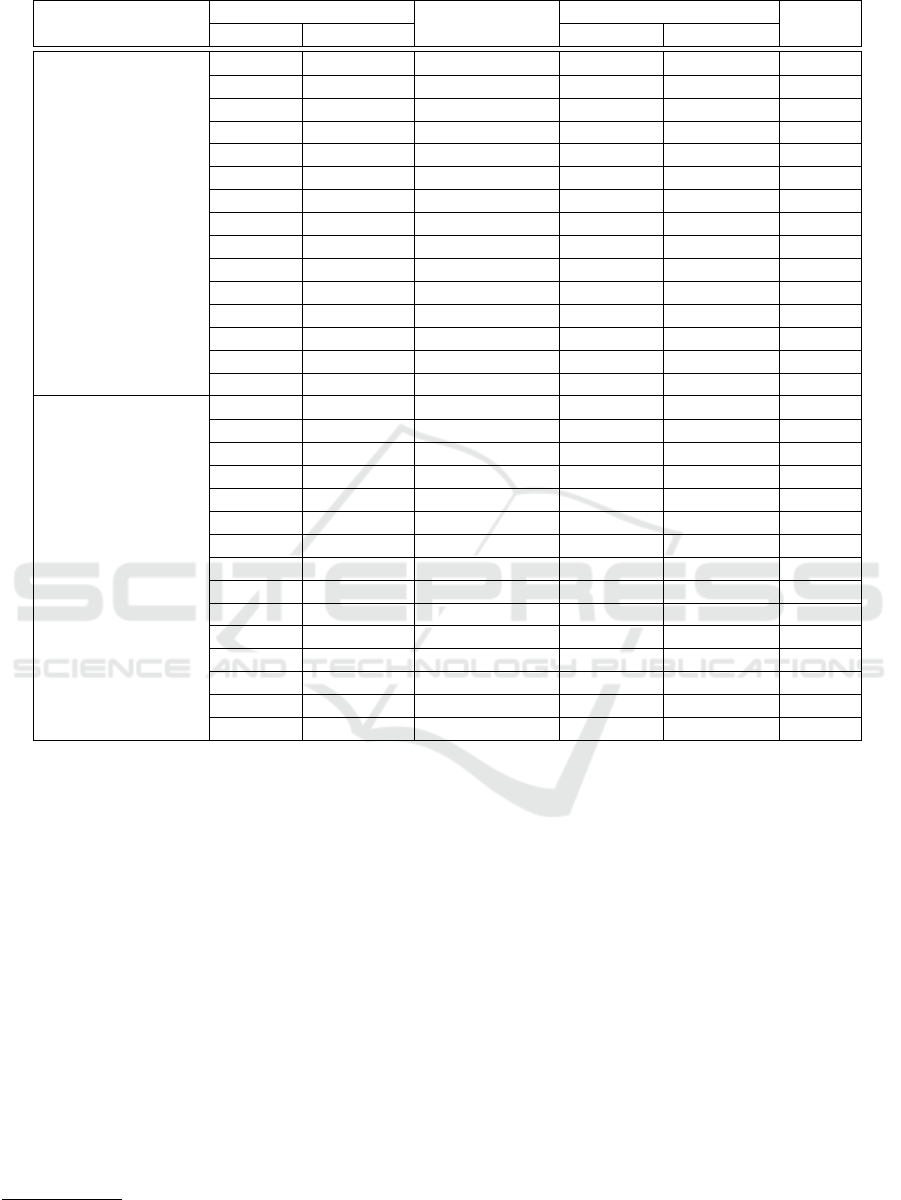
Table 2: Use cases and their estimated execution time for mining 400 blocks.
Nodes Average power
Platform Total (n) Mining (k) Execution time k nodes (n-k) nodes Energy
Raspberry Pi 2
1 1 3082 s 1724 mW 0 mW 5.3 kJ
2 1 3082 s 1724 mW 1144 mW 8.8 kJ
2 2 1710 s 1704 mW 0 mW 5.8 kJ
4 1 3082 s 1724 mW 1143 mW 15.9 kJ
4 2 1710 s 1704 mW 1144 mW 9.7 kJ
4 4 954 s 1667 mW 0 mW 7.5 kJ
8 1 3082 s 1724 mW 1143 mW 30.0 kJ
8 2 1710 s 1704 mW 1144 mW 17.6 kJ
8 4 954 s 1667 mW 1145 mW 10.7 kJ
8 8 575 s 1612 mW 0 mW 7.4 kJ
16 1 3082 s 1724 mW 1143 mW 58.1 kJ
16 2 1710 s 1704 mW 1144 mW 33.2 kJ
16 4 954 s 1667 mW 1145 mW 19.5 kJ
16 8 575 s 1612 mW 1146 mW 12.7 kJ
16 16 386 s 1544 mW 0 mW 10.0 kJ
Nvidia Jetson TK1
1 1 702 s 6517 mW 0 mW 4.6 kJ
2 1 702 s 6517 mW 1990 mW 6.0 kJ
2 2 393 s 6308 mW 0 mW 5.0 kJ
4 1 702 s 6517 mW 1973 mW 8.7 kJ
4 2 393 s 6308 mW 2006 mW 6.5 kJ
4 4 223 s 5948 mW 0 mW 5.3 kJ
8 1 702 s 6517 mW 1968 mW 14.2 kJ
8 2 589 s 6308 mW 1990 mW 9.7 kJ
8 4 223 s 5948 mW 2032 mW 7.1 kJ
8 8 138 s 5435 mW 2184 mW 6.3 kJ
16 1 702 s 6517 mW 1966 mW 25.3 kJ
16 2 393 s 6308 mW 1985 mW 15.9 kJ
16 4 223 s 5948 mW 2018 mW 10.7 kJ
16 8 138 s 5435 mW 2071 mW 8.3 kJ
16 16 96 s 4838 mW 0 mW 7.6 kJ
ms the performance starts to drop, and e.g. with 4
mining nodes and a latency of 1000 ms the execu-
tion time has increased by 80%. Energy consumption
follows the increase in execution time since average
power consumption is practically the same regardless
of the network latency.
4.3 Validation of Simulation Results
To evaluate the precision of the simulations a subset
of the Jetson TK1 use cases was both simulated and
then measured in real hardware. The execution time
to mine a specific number of blocks was extracted
from the simulations with a varying number of mi-
ning nodes and network latency. The results were
compared to the values obtained from the develop-
ment board. Due to a bug
4
in the geth Ethereum
client we were unable to validate the simulation re-
4
https://github.com/ethereum/go-ethereum/issues/2783
sults on Raspberry Pi 2. Measurements of multiple
nodes were performed by running multiple instances
of geth on a single Jetson TK1. Therefore, only one
thread per node was used in most comparisons to ens-
ure that each node had its own core. Network latency
was emulated with linux traffic control (tc).
Table 4 compares the execution times estimates
from simulations to observations from the real exe-
cution platform. The average and maximum absolute
errors in simulations were 9% and 14%, respectively.
The average error is slightly better than the histori-
cal average error of 12% in ABSOLUT simulations.
Individual results indicate that the effect of network
latency and multithreading in geth is underestimated.
Evaluating the Efficiency of Blockchains in IoT with Simulations
221
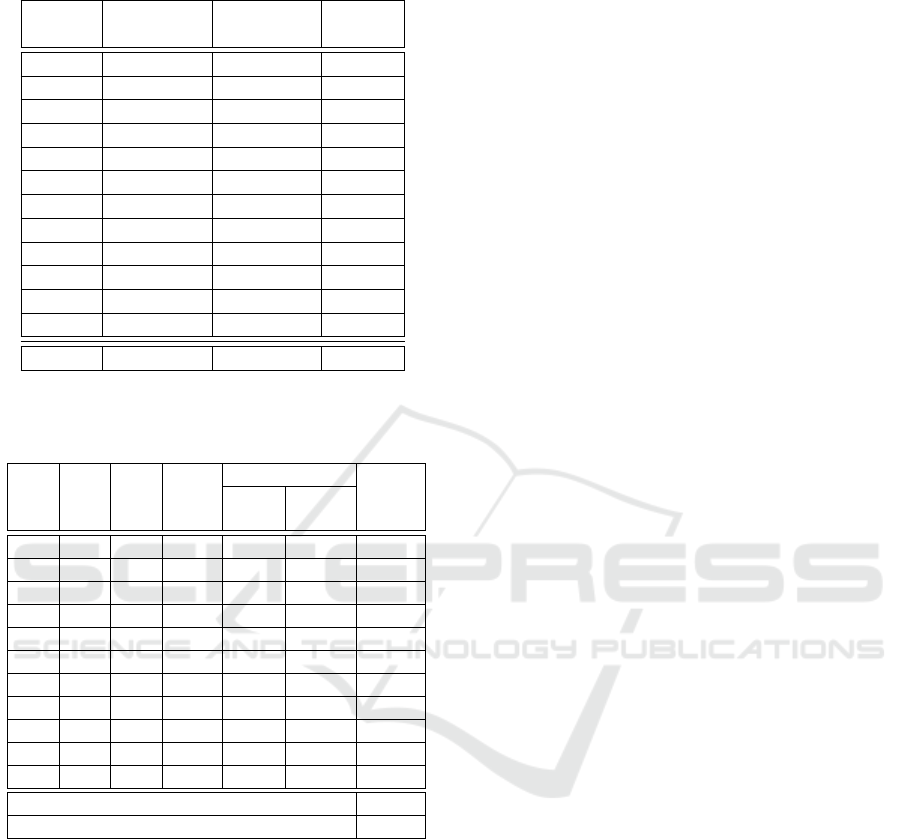
Table 3: Execution time and energy consumption as a
function of network latency and number of mining nodes.
Mining
nodes
Latency Execution
time
Energy
4 1 ms 956 s 6.4 kJ
4 10 ms 967 s 6.4 kJ
4 100 ms 1030 s 6.9 kJ
4 1000 ms 1710 s 11.7 kJ
16 1 ms 386 s 9.5 kJ
16 10 ms 390 s 9.6 kJ
16 100 ms 406 s 10.0 kJ
16 1000 ms 576 s 14.8 kJ
64 1 ms 245 s 22.3 kJ
64 10 ms 245 s 22.4 kJ
64 100 ms 249 s 22.8 kJ
64 1000 ms 292 s 27.6 kJ
1 1 ms 3082 s 5.3 kJ
Table 4: Simulation vs. measurements on the Tegra K1 plat-
form. N, T, and B are the number of nodes, threads and
blocks. L is the network latency and E the simulation error.
Exec. time [s]
N T B L
[ms]
Est. Meas. E [%]
1 1 100 1 621 642 -3
1 1 200 1 1189 1122 6
1 1 400 1 2325 2314 0
2 1 200 1 650 569 14
4 1 200 1 352 384 -9
4 1 200 10 357 415 -14
4 1 200 100 383 443 -14
4 1 200 1000 658 736 -11
1 2 200 1 660 580 14
1 3 200 1 472 451 5
1 4 200 1 378 373 1
Average absolute error 9%
Maximum absolute error 14%
5 DISCUSSION
In the different kind of blockchain applications the pa-
rameters can differ greatly. The average confirmation
time of a Bitcoin transaction is over 10 minutes and
an hour in the worst case, which would not work in
many practical implementations. Also if the difficulty
of the PoW takes too much computing power it cannot
to be used with smaller gadgets. Possibility to simu-
late different situations with chosen parameters saves
a lot of developers time and resources.
Mining algorithms, including Ethereum’s SHA-3
based Ethash, are optimal for dedicated hardware
platforms. However, for IoT such requirement is not
feasible; additional dedicated hardware would incre-
ase the cost of devices significantly. Hence, block-
chains must operate on general purpose platforms,
like ARM in our simulations. However, it is often
possible to assign mining responsibilities for high-end
machines and deploy only light transaction verifica-
tion functionality to the constrained things. The si-
mulation tool presented in this paper provides a mean
to asses, if it is possible to deploy blockchains that
rely only on the constrained things for mining.
Blockchains where mining relies on constrained
things may be vulnerable for attack where an advers-
ary with high mining capabilities can surpass the per-
formance of very large number of things. Thus the
consensus mechanism should be designed in a way
that prevents such attackers from benefiting from their
superior power. Also permissions can be used to limit
the possibility of an attacker on the blockchain.
6 CONCLUSION
Our work demonstrates that we can use the ABSO-
LUT tool to quite accurately simulate blockchain im-
plementations in embedded devices. This should help
in rapid prototyping of different blockchains on IoT
platforms and bring savings in projects that need to
develop blockchain implementations.
As future work, we seek to utilise this tool in our
current and upcoming projects related to blockchains
and IoT. This will help in refining the tools and also
further validating our approach. We also expect this
tool to help in getting better results in these projects.
ACKNOWLEDGEMENTS
The authors wish to thank TEKES - The Finnish Fun-
ding Agency for Technology and Innovation (BOND
project) for supporting this research.
REFERENCES
Ala-Peijari, O. (2014). Bitcoin The Virtual Currency:
Energy Efficient Mining of Bitcoins. Master’s Thesis,
Aalto University.
Bernstein, D. J. and Lange, T. (2012). The new SHA-3
software shootout. IACR Cryptology ePrint Archive,
2012:4.
Binkert, N., Beckmann, B., and Black, G. (2011). The
Gem5 simulator. ACM SIGARCH Computer Archi-
tecture News, 39:1–7.
IoTBDS 2017 - 2nd International Conference on Internet of Things, Big Data and Security
222

Bitcoin community (2015). Bitcoin wiki: Non-specialized
hardware comparison. https://en.bitcoin.it/wiki/Non-
specialized hardware comparison. Accessed 2016-
11-14.
Bitcoin community (2016). Bitcoin wiki: Mining
hardware comparison. https://en.bitcoin.it
/wiki/Mining hardware comparison. Accessed
2016-11-14.
Bortolotti, D., Pinto, C., and Marongiu, A. (2013). Virtual-
SoC: A full system simulation environment for mas-
sively parallel heterogeneous System-on-Chip. In Pa-
rallel and Distributed Processing Symposium Works-
hop & PhD Forum.
Dwork, C. and Naor, M. (1993). Pricing via Processing, Or,
Combatting Junk Mail, Advances in Cryptology. In
CRYPTO’92: Lecture Notes in Computer Science No.
740, page 139–147. Springer.
Etherium Project (2016). Ethash specification.
https://github.com/ethereum/wiki/wiki/Ethash.
Accessed 2016-11-14.
Franco, Pedro (2014). Understanding Bitcoin: Crypto-
graphy, Engineering and Economics. John Wiley &
Sons.
Gervais, A., Karame, G. O., W
¨
ust, K., Glykantzis, V., Ritz-
dorf, H., and Capkun, S. (2016). On the security and
performance of proof of work blockchains. In Procee-
dings of the ACM SIGSAC Conference on Computer
and Communications Security (CCS’16).
Guo, X., Srivastav, M., Huang, S., Ganta, D., Henry, M. B.,
Nazhandali, L., and Schaumont, P. (2012). ASIC im-
plementations of five SHA-3 finalists. In 2012 De-
sign, Automation Test in Europe Conference Exhibi-
tion (DATE), pages 1006–1011.
Heirman, W., Sarkar, S., and Carlson, T. (2012). Power-
aware multi-core simulation for early design stage
hardware/software co-optimization. In Proceedings of
the 21st international conference on parallel architec-
tures and compilation techniques.
Jungk, B. (2012). Evaluation of compact FPGA implemen-
tations for all SHA-3 finalists. In The Third SHA-3
Candidate Conference.
Kaps, J.-P., Yalla, P., Surapathi, K. K., Habib, B., Vadla-
mudi, S., and Gurung, S. (2012). Lightweight imple-
mentations of SHA-3 finalists on FPGAs. In The Third
SHA-3 Candidate Conference. Citeseer.
Kreku, J. (2012). Early-phase Performance Evaluation of
Computer Systems using Workload Models and Sys-
temC.
Kreku, J., Tiensyrj
¨
a, K., and Vanmeerbeeck, G. (2010). Au-
tomatic Workload Generation for System-level Explo-
ration based on Modified GCC Compiler. In Procee-
dings of the Design, Automation and Test in Europe
Conference and Exhibition.
Latif, K., Rao, M. M., Aziz, A., and Mahboob, A. (2012).
Efficient hardware implementations and hardware per-
formance evaluation of SHA-3 finalists. In The Third
SHA-3 Candidate Conference.
Nakamoto, S. (2008). Bitcoin: A peer-to-peer electronic
cash system. https://bitcointalk.org/bitcoin.pdf.
NIST (2015). SHA-3 Standard: Permutation-Based
Hash and Extendable-Output Functions. FIPS
PUB 202. http://nvlpubs.nist.gov/nistpubs
/FIPS/NIST.FIPS.202.pdf.
O’Dwyer, K. and Malone, D. (2014). Bitcoin mining and
its energy footprint. In IET Irish Signals & Systems
Conference.
Papaefstathiou, I., Chrysos, G., and Sarakis, L. (2015).
COSSIM: A Novel, Comprehensible, Ultra-Fast,
Security-Aware CPS Simulator.
Pessl, P. and Hutter, M. (2013). Pushing the limits of SHA-
3 hardware implementations to fit on RFID. In Inter-
national Workshop on Cryptographic Hardware and
Embedded Systems, pages 126–141. Springer.
Posadas, H., Real, S., and Villar, E. (2011). M3-Scope:
Performance modelling of multi-processor embedded
systems for fast design space exploration.
Rittinghaus, M., Miller, K., Hillenbrand, M., and Bellosa,
F. (2013). SimuBoost: Scalable Parallelization of
Functional System Simulation. In 11th International
Workshop on Dynamic Analysis.
Schwabe, P., Yang, B.-Y., and Yang, S.-Y. (2012). SHA-3
on ARM11 processors. In International Conference
on Cryptology in Africa, pages 324–341. Springer.
Van Stralen, P. and Pimentel, A. (2010). Scenario-based de-
sign space exploration of MPSoCs. In Proceedings of
the IEEE International Conference on Computer De-
sign.
Wood, G. (2014). Ethereum: A secure decentralised ge-
neralised transaction ledger. Ethereum Project Yellow
Paper.
Evaluating the Efficiency of Blockchains in IoT with Simulations
223
