
EyeRecToo: Open-source Software for Real-time Pervasive
Head-mounted Eye Tracking
Thiago Santini, Wolfgang Fuhl, David Geisler and Enkelejda Kasneci
Perception Engineering, University of T
¨
ubingen, T
¨
ubingen, Germany
{thiago.santini, wolfgang.fuhl, david.geisler, enkelejda.kasneci}@uni-tuebingen.de
Keywords:
Eye Movements, Pupil Detection, Calibration, Gaze Estimation, Open-source, Eye Tracking, Data Acquisi-
tion, Human-computer Interaction, Real-time, Pervasive.
Abstract:
Head-mounted eye tracking offers remarkable opportunities for research and applications regarding pervasive
health monitoring, mental state inference, and human computer interaction in dynamic scenarios. Although
a plethora of software for the acquisition of eye-tracking data exists, they often exhibit critical issues when
pervasive eye tracking is considered, e.g., closed source, costly eye tracker hardware dependencies, and requir-
ing a human supervisor for calibration. In this paper, we introduce EyeRecToo, an open-source software for
real-time pervasive head-mounted eye-tracking. Out of the box, EyeRecToo offers multiple real-time state-of-
the-art pupil detection and gaze estimation methods, which can be easily replaced by user implemented algo-
rithms if desired. A novel calibration method that allows users to calibrate the system without the assistance of
a human supervisor is also integrated. Moreover, this software supports multiple head-mounted eye-tracking
hardware, records eye and scene videos, and stores pupil and gaze information, which are also available as a
real-time stream. Thus, EyeRecToo serves as a framework to quickly enable pervasive eye-tracking research
and applications. Available at: www.ti.uni-tuebingen.de/perception.
1 INTRODUCTION
In the past two decades, the number of researchers
using eye trackers has grown enormously (Holmqvist
et al., 2011), with researchers stemming from several
distinct fields (Duchowski, 2002). For instance, eye
tracking has been employed from simple and fixed re-
search scenarios – e.g., language reading (Holmqvist
et al., 2011) – to complex and dynamic cases – e.g.,
driving (Kasneci et al., 2014) and ancillary operating
microscope controls (Fuhl et al., 2016b). In partic-
ular, pervasive eye tracking also has the potential for
health monitoring (Vidal et al., 2012), mental state in-
ference (Fuhl et al., 2016b), and human computer in-
teraction (Majaranta and Bulling, 2014). Naturally,
these distinct use cases have specific needs, lead-
ing to the spawning of several systems with differ-
ent capabilities. In fact, Holmqvist et al. (Holmqvist
et al., 2011) report that they were able to find 23
companies selling video-based eye-tracking systems
in 2009. However, existing eye tracking systems of-
ten present multiple critical issues when pervasive
eye tracking is considered. For instance, commer-
cial systems rely on closed-source software, offering
their eye tracker bundled with their own software so-
lutions. Besides the high costs involved, researchers
and application developers have practically no direct
alternatives if the system does not work under the re-
quired conditions (Santini et al., 2016b). Other (open-
source) systems – e.g., openEyes (Li et al., 2006a),
PyGaze (Dalmaijer et al., 2014), Pupil (Pupil Labs,
2016), and EyeRec (Santini et al., 2016b) – either
focus on their own eye trackers, depend on existing
APIs from manufacturers, or require a human super-
visor in order to calibrate the system.
In this paper, we introduce EyeRecToo
1
, an open-
source software for pervasive head-mounted eye
tracking that solves all of the aforementioned issues
to quickly enable pervasive eye tracking research and
applications; its key advantages are as follow.
• Open and Free: the code is freely available.
Users can easily replace built-in algorithms to
prototype their own algorithms or use the software
as is for data acquisition and human-computer in-
terfaces.
• Data Streaming: non-video data is streamed in
1
The name is a wordplay on the competitor EyeRec
“I Rec[ord]” since the software provides similar recording
functionality; hence, EyeRecToo “I Rec[ord] Too”. Permis-
sion to use this name was granted by the EyeRec developers.
96
Santini T., Fuhl W., Geisler D. and Kasneci E.
EyeRecToo: Open-source Software for Real-time Pervasive Head-mounted Eye Tracking.
DOI: 10.5220/0006224700960101
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 96-101
ISBN: 978-989-758-227-1
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

real time through a UDP stream, allowing easy
and quick integration with external buses – e.g.,
automotive CAN – or user applications.
• Hardware Independency: the software handles
from cheap homemade head-mounted eye track-
ers assembled from regular webcams to expensive
commercial hardware
2
.
• Real-time: a low latency software pipeline en-
ables its usage in time-critical applications.
• State-of-the-art Pupil Detection: ElSe, the top
performer pupil detection algorithm, is fully in-
tegrated. Additional integrated methods include
Starburst,
´
Swirski, and ExCuSe.
• State-of-the-art Gaze Estimation: parameteriz-
able gaze estimation based on polynomial regres-
sion (Cerrolaza et al., 2012) and homography (Yu
and Eizenman, 2004).
• Unsupervised Calibration: a method that allows
the user to quickly calibrate the system, indepen-
dently from assistance from a second individual.
• Complete Free Software Stack: combined with
free eye-tracking data analysis software, such as
EyeTrace (K
¨
ubler et al., ), a full eye tracking soft-
ware stack is accessible free of cost.
2 EyeRecToo
EyeRecToo is written in C++ and makes extensive use
of the OpenCV 3.1.0 (Bradski et al., 2000) library
for image processing and the Qt 5.7 framework (Qt
Project, 2016) for its multimedia access and Graphi-
cal User Interface (GUI). Development and testing are
focused on a Windows platform; however the software
also runs under Linux
3
. Moreover, porting to other
platforms (e.g., Android, OS X) should be possible as
all components are cross-platform.
EyeRecToo is built around widgets that provide
functionality and configurability to the system. It was
designed to work with a field camera plus mono or
binocular head-mounted eye trackers but also foresees
the existence of other data input devices in the future
– e.g., an Inertial Measurement Unit (IMU) for head-
movement estimation (Larsson et al., 2016). In fact,
EyeRecToo assumes there is no hardware synchro-
nization between input devices and has a built-in soft-
ware synchronizer. Each input device is associated
with an input widget. Input widgets register with the
synchronizer, read data from the associated device,
2
Provided cameras are accessible through DirectShow
(Windows) or v4l2 (Linux).
3
Windows 8.1/MSVC2015 and Ubuntu 16.04/gcc 5.4.0.
timestamp the incoming data according to a global
monotonic reference clock, possibly process the data
to extend it (e.g., pupil detection), and save the result-
ing extended data, which is also sent to the synchro-
nizer. The synchronizer’s task is then to store the lat-
est data incoming from the input widgets (according
to a time window specified by the user) and, at pre-
defined intervals, generate a DataTuple with times-
tamp t containing the data from each registered in-
put widget with timestamp closest in time to t, thus
synchronizing the input devices data
4
. The resulting
DataTuple is then forwarded to the calibration/gaze
estimation, which complements the tuple with gaze
data. The complete tuple is then stored (data jour-
naling), broadcasted through UDP (data streaming),
and exhibited to the user (GUI update). This results
in a modular and easily extensible design that allows
one to reconstruct events as they occurred during run
time.
2.1 Input Widgets
Currently two input widgets are implemented in the
system: the eye camera input widget, and the field
camera input widget. These run in individual threads
with highest priority in the system. The eye camera
input widget is designed to receive close-up eye im-
ages, allowing the user to select during run time the
input device, region of interest (ROI) in which eye
feature detection is performed, image flipping, and
pupil detection algorithm. Available pupil detection
algorithms and their performance are described in de-
tail in Section 3. The field camera input widget is
designed to capture images from the point of view
(POV) of the eye tracker wearer, allowing the user to
select during run time the input device, image undis-
tortion, image flipping and fiducial marker detection.
Additionally, camera intrinsic and extrinsic parame-
ter estimation is built-in. Currently, ArUcO (Garrido-
Jurado et al., 2014) markers are supported. Both wid-
gets store the video (as fed to their respective image
processing algorithms) as well as their respective de-
tection algorithm data and can be use independently
from other parts of the system (e.g., to detect pupils
in eye videos in an offline fashion).
2.2 Calibration / Gaze Estimation
Widget
This widget provides advanced calibration and gaze
estimation methods, including two methods for cal-
4
In case the input devices are hardware-synchronized,
one can use a delayed trigger based on any of the input de-
vices to preserve synchronization.
EyeRecToo: Open-source Software for Real-time Pervasive Head-mounted Eye Tracking
97

ibration (supervised / unsupervised). The super-
vised calibration is a typical eye tracker calibration,
which requires a human supervisor to coordinate with
the user and select points of regard that the user
gazes during calibration. The unsupervised calibra-
tion methods as well as available gaze estimation
methods are described in depth in Section 4. Eye-
RecToo is also able to automatically reserve some of
the calibration points for a less biased evaluation of
the gaze estimation function. Moreover, functionali-
ties to save and load data tuples (both for calibration
and evaluation) are implemented, which allows devel-
opers to easily prototype new calibration and gaze es-
timation methods based on existing data.
2.3 Supported Eye Trackers
Currently, the software supports Ergoneers’ Dikablis
Essential and Dikablis Professional eye trackers (Er-
goneers, 2016), Pupil Do-It-Yourself kit (Pupil Labs,
2016), and the PS3Eye-based operating microscope
add-on module proposed by Eivazi et al. (Eivazi et al.,
2016)
5
. However, any eye tracker that provides ac-
cess to its cameras through DirectShow (on Windows)
or v4l2 (on Linux) should work effortlessly. For in-
stance, EyeRecToo is able to use regular web cameras
instead of an eye tracker, although the built-in pupil-
detection methods are heavily dependent on the qual-
ity of the eye image – in particular, pupil detection
methods are often designed for near-infrared images.
2.4 Software Latency and Hardware
Requirements
We evaluated the latency of the software pipeline im-
plemented in EyeRecToo using the default configura-
tion, a Dikablis Professional eye tracker, and a ma-
chine running Windows 8.1 with an Intel
R
Core
TM
i5-4590 @ 3.30GHz CPU and 8GB of RAM. In to-
tal, 30.000 samples were collected from each input
device. Table 1 shows the latency of operations that
require a significant amount of time relative to the in-
tersample period of the eye tracker fastest input de-
vice (16.67 ms), namely image acquisition/processing
and storage
6
. It is worth noticing that, given enough
available processing cores, these operations can be re-
alized in a parallel fashion; thus, the remaining slack
based on the 16.67 ms deadline is ≈ 8 ms. Given these
measurements, we estimate that any Intel
R
Core
TM
machine with four cores and 2GB of RAM should be
able to meet the software requirements.
5
Provided that the module remain static w.r.t. the head.
6
Values are based on the default pupil detection (ElSe)
and field images containing at least four markers.
Table 1: Resulting latency (mean±standard deviation) for
time-consuming operations from the 30.000 samples of
each available input widgets.
Operation Input Widget Latency (ms)
Eye Camera 8.35 ± 0.73
Processing
Field Camera 4.97 ± 1.16
Eye Camera 2.85 ± 1.23
Storage
Field Camera 4.39 ± 1.74
3 PUPIL DETECTION
EyeRecToo offers four integrated pupil detection al-
gorithms, which were chosen based on their detection
rate performance – e.g., ElSe (Fuhl et al., 2016a) and
ExCuSe (Fuhl et al., 2015) – and popularity – e.g.,
´
Swirski (
´
Swirski et al., 2012) and Starburst (Li et al.,
2005). Since EyeRecToo’s goal is to enable perva-
sive eye tracking, the main requirements for pupil de-
tection algorithms are real-time capabilities and high
detection rates on challenging and dynamic scenarios.
Based on these requirements, ElSe (Fuhl et al., 2016a)
was selected as default pupil detection algorithm; the
resulting detection rate performance of these algo-
rithms on the data sets provided by (Fuhl et al., 2016a;
Fuhl et al., 2015;
´
Swirski et al., 2012) is shown in Fig-
ure 1. A brief description of each algorithm follows;
a detailed review of these algorithms is given in (Fuhl
et al., 2016c).
0
0.2
0.4
0.6
0.8
1
0 2 4 6 8 10 12 14
Cumulative Detection Rate
Pixel Error
ELSE
EXCUSE
SWIRSKI
STARBURST
Figure 1: Cumulative detection rate given the distance be-
tween detected pupil position relative to a human-annotated
ground-truth distance for each of the available algorithms
based on the data from (Fuhl et al., 2016a).
ElSe (Fuhl et al., 2016a) applies a Canny edge de-
tection method, removes edge connections that could
impair the surrounding edge of the pupil, and evalu-
ates remaining edges according to multiple heuristics
to find a suitable pupil ellipse candidate. If this ini-
tial approach fails, the image is downscaled, and a
second approach attempted. The downscaled image’s
response to a surface difference filter is multiplied by
the complement of its mean filter response, and the
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
98

maximum of the resulting map is taken. This posi-
tion is then refined on the upscaled image based on its
pixel neighborhood.
ExCuSe (Fuhl et al., 2015) selects an initial
method (best edge selection or coarse positioning)
based on the intensity histogram of the input image.
The best edge selection filters a Canny edge image
based on morphologic operations and selects the edge
with the darkest enclosed value. For the coarse posi-
tioning, the algorithm calculates the intersections of
four orientations from the angular integral projection
function. This coarse position is refined by analyzing
the neighborhood of pixels in a window surrounding
this position. The image is thresholded, and the bor-
der of threshold-regions is used additionally to filter
a Canny edge image. The edge with the darkest en-
closed intensity value is selected. For the pupil center
estimation, a least squares ellipse fit is applied to the
selected edge.
´
Swirski et al. (
´
Swirski et al., 2012) starts with
Haar features of different sizes for coarse positioning.
For a window surrounding the resulting position, an
intensity histogram is calculated and clustered using
the k-means algorithm. The separating intensity value
between both clusters is used as threshold to extract
the pupil. A modified RANSAC method is applied to
the thresholded pupil border.
Starburst (Li et al., 2005) first removes the
corneal reflection and then selects pupil edge candi-
dates along rays extending from a starting point. Re-
turning rays are sent from the candidates found in the
previous step, collecting additional candidates. This
process is repeated iteratively using the average point
from the candidates as starting point until conver-
gence. Afterwards, inliers and outliers are identified
using the RANSAC algorithm, a best fitting ellipse is
determined, and the final ellipse parameters are deter-
mined by applying a model-based optimization.
4 CALIBRATION AND GAZE
ESTIMATION
In video-based eye tracking, gaze estimation is the
process of estimating the Point Of Regard (POR) of
the user given eye images. High-end state-of-the-
art mobile eye tracker systems (e.g., SMI and Tobii
glasses (SensoMotoric Instruments GmbH, 2016; To-
bii Technology, 2016)) rely on geometry-based gaze
estimation approaches, which can provide gaze esti-
mations without calibration. In practice, it is common
to have at least an one point calibration to adapt the
geometrical model to the user and estimate the angle
between visual and optical axis, and it has been re-
ported that additional points are generally required for
good accuracy (Villanueva and Cabeza, 2008). Fur-
thermore, such approaches require specialized hard-
ware (e.g., multiple cameras and glint points), cost
in the order of tens of thousands of $USD, and are
susceptible to inaccuracies stemming from lens dis-
tortions (K
¨
ubler et al., 2016). On the other hand, mo-
bile eye trackers that make use of regression-based
gaze-mappings require a calibration step but automat-
ically adapt to distortions and are comparatively low-
cost – e.g., a research grade binocular eye tracker
from Pupil Labs is available for $2340 EUR (Pupil
Labs, 2016). Moreover, similar eye trackers have
been demonstrated by mounting two (an eye and a
field) cameras onto the frames of glasses (Babcock
and Pelz, 2004; Li et al., 2006b; San Agustin et al.,
2010), yielding even cheaper alternatives for the more
tech-savy users. Therefore, we focus on regression
based alternatives, which require calibration.
4.1 Calibration
In its current state, the calibration step presents some
disadvantages and has been pointed out as one of
the main factors hindering a wider adoption of eye
tracking technologies (Morimoto and Mimica, 2005).
Common calibration procedures customarily require
the assistance of an individual other than the eye
tracker user in order to calibrate (and check the ac-
curacy of) the system. The user and the aide must
coordinate so that the aide selects calibration points
accordingly to the user’s gaze. As a result, current
calibration procedures cannot be performed individ-
ually and require a considerable amount of time to
collect even a small amount of calibration points, im-
peding their usage for ubiquitous eye tracking. Ey-
eRecToo provides functionality for these supervised
calibrations such that the users can collect as many
eye-gaze relationships as necessary as well as choose
to sample a single median point or multiple points
per relationship. Furthermore, audible cues are also
provided to minimize the amount of interaction be-
tween user and supervisor, thus diminishing human
error and calibration time.
Besides the regular supervised calibration, Eye-
RecToo integrates a novel unsupervised approach that
enables users to quickly and independently calibrate
head-mounted eye trackers by gazing at a fiducial
marker that moves w.r.t. the user’s head. Addition-
ally, we also provide a companion Android applica-
tion that can be used to display the marker and re-
ceive feedback regarding the quality of the calibra-
tion (see Figure 2). Alternatively, a user can also per-
form this calibration using a printed marker or by dis-
EyeRecToo: Open-source Software for Real-time Pervasive Head-mounted Eye Tracking
99
playing the marker on any screen. After collecting
several calibration points, EyeRecToo then removes
inferior and wrong eye-gaze relationships according
to a series of rationalized approaches based on do-
main specific assumptions regarding head-mounted
eye tracking setups, data, and algorithms (see Fig-
ure 3). From the remaining points, some are reserved
for evaluation based on their spatial location, and the
remaining points are used for calibration. This cali-
bration method, dubbed CalibMe, is described in de-
tail in (Santini et al., 2017).
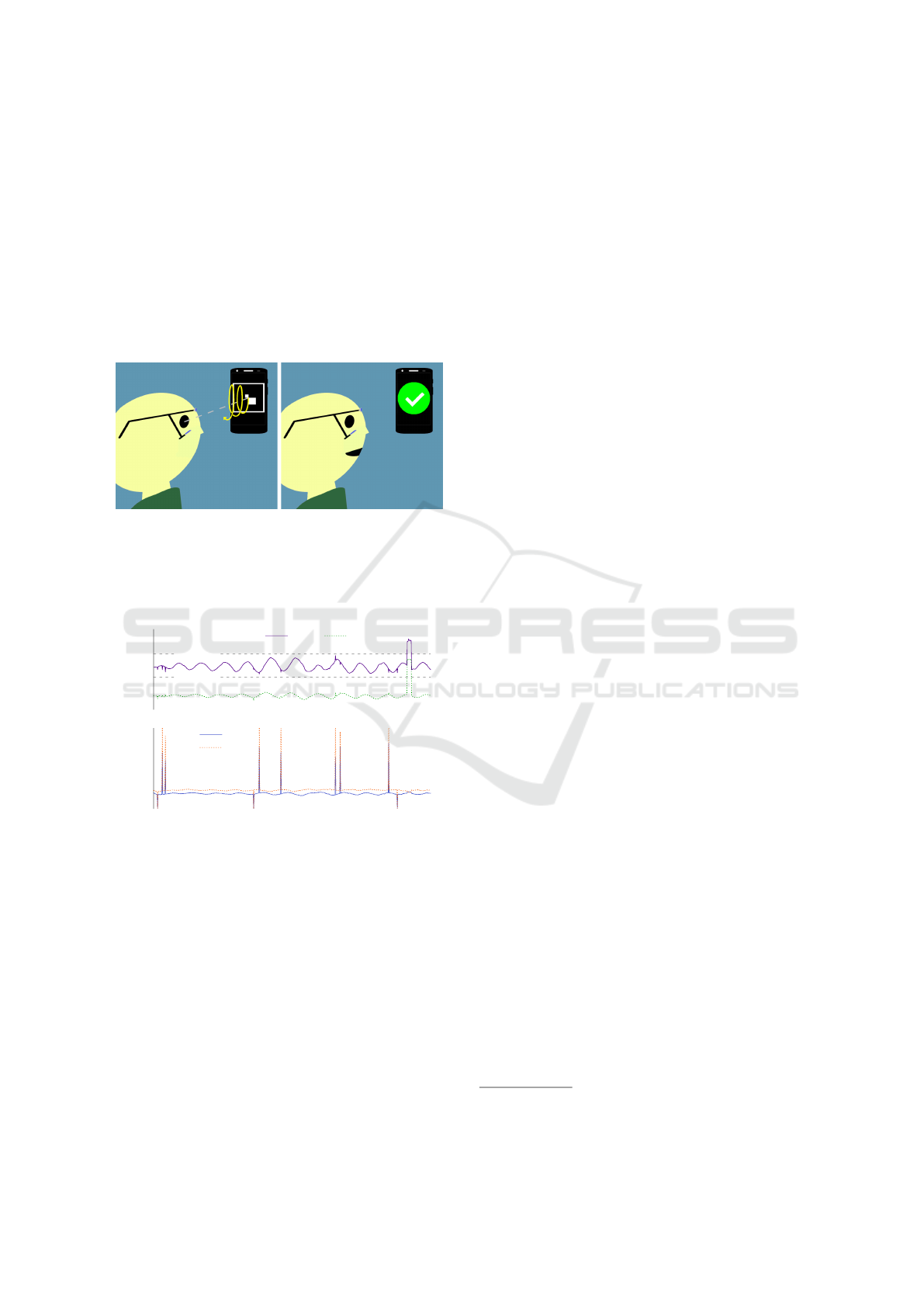
Figure 2: While gazing at the center of the marker, the user
moves the smartphone displaying the collection marker to
collect eye-gaze relationships (left). The eye tracker then
notifies the user that the calibration has been performed suc-
cessfully through visual/haptic/audible feedback, signaling
that the system is now ready to use (right).
50
100
150
200
Pupil Position (px)
b
µ
p
x
+ 2.7σ
p
x
µ
p
y
+ 2.7σ
p
y
p
x
p
y
0
20
40
60
80
100
Pupil Size (px)
a
a
a a a
a
a
c c c
p
w
p
h
Figure 3: Rationalized outlier removal. Outliers based on
subsequent pupil size (a), pupil position range (b), and pupil
detection algorithm specific information (c). Notice how
the pupil position estimate (p
x
, p
y
) is corrupted by such out-
liers.
4.2 Gaze Estimation
These two available calibration methods are comple-
mented by multiple gaze estimation methods. Out of
the box, six polynomial regression approaches are of-
fered – ranging from first to third order bivariate poly-
nomial least-square fits through single value decom-
position. Furthermore, an additional approach based
on projective geometry is also available through pro-
jective space isomorphism (i.e., homography). It is
worth noticing however that the latter requires that
camera parameters be taken into account
7
.
To provide gaze estimation accuracy figures, we
conducted an evaluation employing a second order bi-
variate regression with five adult subjects (4 male, 1
female) – two of which wore glasses during the exper-
iments. The experiment was conducted using a Dik-
ablis Pro eye tracker (Ergoneers, 2016). This device
has two eye (@60 Hz) and one field (@30 Hz) cam-
eras; data tuples were sampled based on the frame
rate of the field camera. These experiments yielded
a mean angular error averaged over all participants
of 0.59
◦
(σ = 0.23
◦
) when calibrated with the un-
supervised method. In contrast, a regular supervised
nine points calibration yielded a mean angular error of
0.82
◦
(σ = 0.15
◦
). Both calibrations exhibited accu-
racies well within physiological values, thus attesting
for the efficacy of the system as a whole.
5 FINAL REMARKS
In this paper, we introduced a software for pervasive
and real-time head-mounted eye trackers. EyeRecToo
has several key advantages over proprietary software
(e.g., openness) and other open-source alternatives
(e.g., multiple eye trackers support, improved pupil
detection algorithm, unsupervised calibration). Fu-
ture work includes automatic 3D eye model construc-
tion (
´
Swirski and Dodgson, 2013), support for remote
gaze estimation (Model and Eizenman, 2010), addi-
tional calibration methods (Guestrin and Eizenman,
2006), real-time eye movement classification based
on Bayesian mixture models (Kasneci et al., 2015;
Santini et al., 2016a), automatic blink detection (Ap-
pel et al., 2016), and support for additional eye track-
ers.
Source code, binaries for Windows, and extensive
documentation are available at:
www.ti.uni-tuebingen.de/perception
REFERENCES
Appel, T. et al. (2016). Brightness- and motion-based blink
detection for head-mounted eye trackers. In Proc. of
the Int. Joint Conf. on Pervasive and Ubiquitous Com-
puting, UbiComp Adjunct. ACM.
Babcock, J. S. and Pelz, J. B. (2004). Building a lightweight
eyetracking headgear. In Proc. of the 2004 Symp. on
Eye tracking research & applications. ACM.
Bradski, G. et al. (2000). The OpenCV Library. Doctor
Dobbs Journal.
7
EyeRecToo has built-in methods to estimate the intrin-
sic and extrinsic camera parameters if necessary.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
100

Cerrolaza, J. J. et al. (2012). Study of polynomial mapping
functions in video-oculography eye trackers. Trans.
on Computer-Human Interaction (TOCHI).
Dalmaijer, E. S. et al. (2014). Pygaze: An open-source,
cross-platform toolbox for minimal-effort program-
ming of eyetracking experiments. Behavior research
methods.
Duchowski, A. T. (2002). A breadth-first survey of eye-
tracking applications. Behavior Research Methods,
Instruments, & Computers.
Eivazi, S. et al. (2016). Embedding an eye tracker into a
surgical microscope: Requirements, design, and im-
plementation. IEEE Sensors Journal.
Ergoneers (2016). Dikablis. www.ergoneers.com.
Fuhl, W. et al. (2015). Excuse: Robust pupil detection in
real-world scenarios. In Computer Analysis of Images
and Patterns 2015. CAIP 2015. 16th Int. Conf. IEEE.
Fuhl, W. et al. (2016a). Else: Ellipse selection for robust
pupil detection in real-world environments. In Proc. of
the Symp. on Eye Tracking Research & Applications.
ACM.
Fuhl, W. et al. (2016b). Non-intrusive practitioner pupil
detection for unmodified microscope oculars. Com-
puters in Biology and Medicine.
Fuhl, W. et al. (2016c). Pupil detection for head-mounted
eye tracking in the wild: an evaluation of the state of
the art. Machine Vision and Applications.
Garrido-Jurado, S. et al. (2014). Automatic generation and
detection of highly reliable fiducial markers under oc-
clusion. Pattern Recognition.
Guestrin, E. D. and Eizenman, M. (2006). General theory
of remote gaze estimation using the pupil center and
corneal reflections. Biomedical Engineering, IEEE
Trans. on.
Holmqvist, K. et al. (2011). Eye tracking: A comprehensive
guide to methods and measures. Oxford University.
Kasneci, E. et al. (2014). The applicability of probabilis-
tic methods to the online recognition of fixations and
saccades in dynamic scenes. In Proc. of the Symp. on
Eye Tracking Research and Applications.
Kasneci, E. et al. (2015). Online recognition of fixations,
saccades, and smooth pursuits for automated analysis
of traffic hazard perception. In Artificial Neural Net-
works. Springer.
K
¨
ubler, T. C. et al. Analysis of eye movements with eye-
trace. In Biomedical Engineering Systems and Tech-
nologies. Springer.
K
¨
ubler, T. C. et al. (2016). Rendering refraction and reflec-
tion of eyeglasses for synthetic eye tracker images. In
Proc. of the Symp. on Eye Tracking Research & Appli-
cations. ACM.
Larsson, L. et al. (2016). Head movement compensation
and multi-modal event detection in eye-tracking data
for unconstrained head movements. Journal of Neu-
roscience Methods.
Li, D. et al. (2005). Starburst: A hybrid algorithm
for video-based eye tracking combining feature-based
and model-based approaches. In Computer Vision and
Pattern Recognition Workshops, 2005. CVPR Work-
shops. IEEE Computer Society Conf. on. IEEE.
Li, D. et al. (2006a). openeyes: A low-cost head-mounted
eye-tracking solution. In Proc. of the Symp. on Eye
Tracking Research &Amp; Applications.
Li, D. et al. (2006b). openeyes: a low-cost head-mounted
eye-tracking solution. In Proc. of the 2006 Symp. on
Eye tracking research & applications. ACM.
Majaranta, P. and Bulling, A. (2014). Eye Tracking and
Eye-Based Human-Computer Interaction. Advances
in Physiological Computing. Springer.
Model, D. and Eizenman, M. (2010). User-calibration-free
remote gaze estimation system. In Proc. of the Symp.
on Eye-Tracking Research & Applications. ACM.
Morimoto, C. H. and Mimica, M. R. (2005). Eye gaze track-
ing techniques for interactive applications. Computer
Vision and Image Understanding.
Pupil Labs (2016). www.pupil-labs.com/. Accessed: 16-
09-07.
Qt Project (2016). Qt Framework. www.qt.io/.
San Agustin, J. et al. (2010). Evaluation of a low-cost open-
source gaze tracker. In Proc. of the 2010 Symp. on
Eye-Tracking Research & Applications. ACM.
Santini, T. et al. (2016a). Bayesian identification of fix-
ations, saccades, and smooth pursuits. In Proc. of
the Symp. on Eye Tracking Research & Applications.
ACM.
Santini, T. et al. (2016b). Eyerec: An open-source data ac-
quisition software for head-mounted eye-tracking. In
Proc. of the Joint Conf. on Computer Vision, Imaging
and Computer Graphics Theory and Applications.
Santini, T. et al. (2017). CalibMe: Fast and unsuper-
vised eye tracker calibration for gaze-based perva-
sive human-computer interaction. In Proc. of the CHI
Conf. on Human Factors in Computing Systems.
SensoMotoric Instruments GmbH (2016). www.smivision.
com/. Accessed: 16-09-07.
´
Swirski, L. and Dodgson, N. A. (2013). A fully-automatic,
temporal approach to single camera, glint-free 3d eye
model fitting. In Proc. of ECEM.
´
Swirski, L. et al. (2012). Robust real-time pupil tracking in
highly off-axis images. In Proc. of the Symp. on Eye
Tracking Research and Applications. ACM.
Tobii Technology (2016). www.tobii.com. Accessed: 16-
09-07.
Vidal, M. et al. (2012). Wearable eye tracking for mental
health monitoring. Computer Communications.
Villanueva, A. and Cabeza, R. (2008). A novel gaze estima-
tion system with one calibration point. IEEE Trans. on
Systems, Man, and Cybernetics.
Yu, L. H. and Eizenman, M. (2004). A new methodology
for determining point-of-gaze in head-mounted eye
tracking systems. IEEE Trans. on Biomedical Engi-
neering.
EyeRecToo: Open-source Software for Real-time Pervasive Head-mounted Eye Tracking
101
