
An Analysis of Geometric Semantic Crossover: A Computational
Geometry Approach
Mauro Castelli
1
, Luca Manzoni
2
, Ivo Gonc¸alves
1,5
, Leonardo Vanneschi
1
, Leonardo Trujillo
3
and Sara Silva
4,5
1
NOVA IMS, Universidade Nova de Lisboa, 1070-312 Lisboa, Portugal
2
DISCo, Universit
´
a degli Studi di Milano Bicocca, 20126 Milano, Italy
3
Posgrado en Ciencias de la Ingenier
´
ıa, Instituto Tecnol
´
ogico de Tijuana, Tijuana, Mexico
4
BioISI, Faculty of Sciences, University of Lisbon, Campo Grande, 1749-016 Lisbon, Portugal.
5
CISUC, Department of Informatics Engineering, University of Coimbra, 3030-290 Coimbra, Portugal
Keywords:
Genetic Programming, Semantics, Convex Hull.
Abstract:
Geometric semantic operators have recently shown their ability to outperform standard genetic operators on
different complex real world problems. Nonetheless, they are affected by drawbacks. In this paper, we focus
on one of these drawbacks, i.e. the fact that geometric semantic crossover has often a poor impact on the
evolution. Geometric semantic crossover creates an offspring whose semantics stands in the segment joining
the parents (in the semantic space). So, it is intuitive that it is not able to find, nor reasonably approximate, a
globally optimal solution, unless the semantics of the individuals in the population “contains” the target. In this
paper, we introduce the concept of convex hull of a genetic programming population and we present a method
to calculate the distance from the target point to the convex hull. Then, we give experimental evidence of the
fact that, in four different real-life test cases, the target is always outside the convex hull. As a consequence,
we show that geometric semantic crossover is not helpful in those cases, and it is not even able to approximate
the population to the target. Finally, in the last part of the paper, we propose ideas for future work on how to
improve geometric semantic crossover.
1 INTRODUCTION
Methods to integrate semantic awareness gained
a vast popularity in the Genetic Programming
(GP) (Koza, 1992) community in the last few
years (Vanneschi et al., 2014a). In particular, in
the last three years, a noteworthy attention was
dedicated to Geometric Semantic GP (GSGP), a
version of GP introduced by Moraglio and coau-
thors in 2012 (Moraglio et al., 2012), that uses so
called Geometric Semantic Operators (GSOs), in-
stead of the traditional crossover and mutation.
Even though the term semantics can have sev-
eral different interpretations, it is a common trend
in the GP community (and this is also the definition
we adopt here) to identify the semantics of a solu-
tion with the vector of its output values on the training
data (Vanneschi et al., 2014a; Moraglio et al., 2012).
Under this perspective, a GP individual can be identi-
fied with a point (its semantics) in a multidimensional
space that we call semantic space, which has a num-
ber of dimensions equal to the number of training in-
stances. The objective of GSOs is to create transfor-
mations on the syntax of individuals that correspond
to precise operators of Genetic Algorithms (GAs) in
the semantic space. More in particular, GSOs are Ge-
ometric Semantic Crossover (GSXO) and Geometric
Semantic Mutation (GSM). GSXO corresponds to ge-
ometric crossover in the semantic space, in the sense
that it generates an offspring whose semantics stands
in the segment joining the semantics of the parents.
GSM corresponds to geometric mutation (also called
ball or box mutation (Vanneschi et al., 2013)) in the
semantic space, in the sense that if we mutate an in-
dividual x, we obtain an individual y such that the se-
mantics of y is a weak perturbation of the semantics
of x.
One of the motivations for the success of GSGP
probably lies in the fact that GSOs induce a uni-
modal fitness landscape on any supervised learning
Castelli, M., Manzoni, L., Gonçalves, I., Vanneschi, L., Trujillo, L. and Silva, S.
An Analysis of Geometric Semantic Crossover: A Computational Geometry Approach.
DOI: 10.5220/0006056402010208
In Proceedings of the 8th International Joint Conference on Computational Intelligence (IJCCI 2016) - Volume 1: ECTA, pages 201-208
ISBN: 978-989-758-201-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
201

problem (like for instance classification or regres-
sion), thus favoring GP evolvability. Also thanks to
an efficient implementation of GSGP that was de-
fined in 2013 (Vanneschi et al., 2013; Castelli et al.,
2015a), it was possible to successfully apply GSGP
to several different complex real-life applications (see
for instance (Castelli et al., 2014, 2015b, 2013a)).
However, GSGP has at least the following recog-
nized drawbacks: (1) GSOs generate individuals that
are larger than their parents, and this causes a rapid
growth in the size of the individuals in the popula-
tion; (2) GSXO was shown to be quite ineffective on
a large set of applications.
The former problem is widely discussed in literature.
The implementation proposed in (Vanneschi et al.,
2013; Castelli et al., 2015a) is a workaround to this
problem, in the sense that, although not limiting the
code growth, it makes the system not only usable in
practice, but even more efficient than standard GP.
This paper focuses on the latter drawback, already
pointed out in the literature for instance in (Moraglio
and Mambrini, 2013), where a purely mutation-
based GSGP was proposed, after recognizing the use-
lessness of GSXO. We believe that one of the reasons
for the poor performance of GSXO lies in its geomet-
ric property. In fact, as we said above, GSXO gener-
ates an offspring whose semantics stands in the seg-
ment joining the semantics of the parents. In this per-
spective, if we imagine a GP population as a cloud
of points in the semantic space, we could informally
say that crossover is only able to generate points that
are “inside” the cloud. So, if the target (that is also a
known point in the semantic space) is not contained
inside the cloud, GSXO will never be able to gener-
ate it. Also, if the target is quite far from the cloud,
GSXO will not be even able to reasonably approxi-
mate it.
The main objective of this paper is to confirm this
hypothesis by means of a set of experiments. For
achieving this objective, we need a formal tool that
allows us to “capture” our idea of cloud of individu-
als in the semantic space. More specifically, it would
be useful to have a formal method to indicate what we
could informally call the “border” of a cloud. In this
way, we could use this tool both for understanding if a
given point is “inside” or “outside” the cloud and for
calculating the distance from one point to the cloud.
Contributions of this paper are: (1) Introduction of
the concept of convex hull, as a tool to represent the
“border” of a set of points in the semantic space. (2)
Introduction of a method to understand if a point is
contained in the convex hull or not. (3) Introduction
of a method to calculate the distance from a point to
the convex hull.
The first contribution has already been considered
in (Moraglio, 2011), where authors showed that all the
evolutionary algorithms using geometric crossover
with no mutation perform the same form of convex
search regardless of the underlying representation, the
specific selection mechanism, the specific offspring
distribution, the specific search space, and the prob-
lem at hand.
With the contributions provided in our study, we
are able to monitor the convex hull of the points rep-
resenting the semantics of all the individuals in the
population during the GP evolution. In particular, we
able to study the evolution of the distance from the
target to the convex hull during a GP run.
In this paper, we compare two GSGP systems: the
first one uses both GSXO and GSM; the second one
uses only GSXO. The different behaviour of the lat-
ter, compared to the first, should allow us to shade a
light on the limitations of GSXO. As test cases for
this experimental study, we have decided to use four
real-life symbolic regression problems from the UCI
repository (Lichman, 2013).
2 GEOMETRIC SEMANTIC
OPERATORS
GSOs are becoming more and more popular in the
GP community (Vanneschi et al., 2014a), probably
because of their property of inducing a unimodal fit-
ness landscape on any problem consisting in matching
sets of input data into known targets (like for instance
supervised learning problems, such as regression and
classification). To have an intuition of this property
(whose proof can be found in (Moraglio et al., 2012)),
let us first consider a Genetic Algorithms (GAs) prob-
lem in which the unique global optimum is known and
the fitness of each individual (to be minimized) cor-
responds to its distance to the global optimum (our
reasoning holds for any employed distance). In this
problem, if we use, for instance, ball mutation (Kraw-
iec and Lichocki, 2009) (i.e. a variation operator that
slightly perturbs some of the coordinates of a solu-
tion), then any possible individual different from the
global optimum has at least one fitter neighbor (indi-
vidual resulting from its mutation). So, there are no
local optima. In other words, the fitness landscape is
unimodal, and consequently the problem is character-
ized by a good evolvability. Similar considerations
hold for many types of crossover, including various
kinds of geometric crossover (Krawiec and Lichocki,
2009).
Now, let us consider the typical GP problem of
finding a function that maps sets of input data into
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
202

known target values (as we said, regression and clas-
sification are particular cases). The fitness of an indi-
vidual for this problem is typically a distance between
its predicted output values and the target ones (error
measure). GSOs simply define transformations on the
syntax of the individuals that correspond to geomet-
ric crossover and ball mutation in the semantic space,
thus allowing us to map the considered GP problem
into the previously discussed GA problem.
Geometric semantic crossover (GSXO)
1
generates, as the unique offspring of parents
T
1
, T
2
: R
n
→ R, the expression:
T
XO
= (T
1
· T
R
) + ((1 − T
R
) · T
2
)
where T
R
is a random real function whose output val-
ues range in the interval [0, 1].
Analogously, geometric semantic muta-
tion (GSM) returns, as the result of the mutation of
an individual T : R
n
→ R, the expression:
T
M
= T + ms · (T
R1
− T
R2
)
where T
R1
and T
R2
are random real functions with
codomain in [0, 1] and ms is a parameter called mu-
tation step.
Moraglio et al. (Moraglio et al., 2012) show that
GSXO corresponds to geometric crossover in the se-
mantic space (i.e. the point representing the offspring
stands on the segment joining the points representing
the parents) and GSM corresponds to ball mutation
on the semantic space (the semantics of the individ-
ual generated by mutation is a weak perturbation of
the semantics of the individual to which mutation is
applied), and thus GSM induces a unimodal fitness
landscape on the above mentioned types of problem.
3 CONVEX HULL
This section reports simple computational geometry
concepts that will be used in the following sections
to analyze the performance of GSXO. The following
definitions are taken from (de Berg et al., 2008). A
subset S of the plane is called convex if and only if
for any pair of points p, q ∈ S the line segment pq is
completely contained in S. The convex hull CH(S)
of a set S is the smallest convex set that contains S.
In other terms, it is the intersection of all convex sets
that contain S. To simplify, it is possible to visualize
1
Here we report the definition of the geometric seman-
tic operators as given by Moraglio et al. for real functions
domains, since these are the operators we will use in the ex-
perimental phase. For applications that consider other types
of data, the reader is referred to (Moraglio et al., 2012).
what the convex hull looks like by a thought experi-
ment (taken from (de Berg et al., 2008)). Imagine that
the points are nails sticking out of the plane. Take
an elastic rubber band, hold it around the nails, and
let it go. It will snap around the nails, minimizing its
length. The area enclosed by the rubber band is the
convex hull of the set of points. This leads to an al-
ternative definition of the convex hull of a finite set P
of points in the plane: it is the unique convex polygon
whose vertices are points from P and that contains all
points of P. It is possible to prove that this definition
is equivalent to the one given earlier (de Berg et al.,
2008).
While several algorithms have been proposed to
efficiently determine the convex hull of a set of
points, the large majority of them considers only a
2-dimensional or 3-dimensional space. In this work,
we need to find the convex hull in an n-dimensional
space, where the size of the space n is determined by
the independent variables that characterize the partic-
ular application at hand.
For this reason, in our work we follow a differ-
ent approach. Instead of directly building the convex
hull, we try to understand if a point (that successively
in our experiments will be the target) is inside the con-
vex hull formed by a set of points (i.e., the semantics
of the candidate solutions). To do that we follow the
method reported in Chapter 11 of (Boyd and Vanden-
berghe, 2004). Basically the idea is to solve a system
of linear equations subjects to some constraints. If a
solution to the system exists then it is possible to con-
clude that a given point is inside the convex hull.
The method, described in detail in (Boyd and Van-
denberghe, 2004), re-adapted by us for GP, is the fol-
lowing: let n be the number of individuals in a popu-
lation and m the number of training samples. Let x
i, j
be the signed error of the i-th individual on the j-th
training sample. We can the build the following sys-
tem of linear equations in the n variables a
1
, . . . , a
n
:
a
1
x
1,1
+ a
2
x
2,1
+ . . . + a
n
x
n,1
= 0
a
1
x
1,2
+ a
2
x
2,2
+ . . . + a
n
x
n,2
= 0
.
.
.
a
1
x
1,m
+ a
2
x
2,m
+ . . . + a
n
x
n,m
= 0
a
1
+ a
2
+ . . . + a
n
= 1
a
i
≥ 0 ∀i ∈ {1, . . . , n}
The previous system has a solution (i.e., a vector
(a
1
, a
2
, . . . , a
n
) if and only if the optimal individual
(i.e., the one that has zero error on the training set) can
be expressed as a linear combination of the existing
individuals where the coefficients are a
1
, a
2
, . . . , a
n
.
This is actually equivalent of saying that the opti-
mum resides in the convex hull given by the points
An Analysis of Geometric Semantic Crossover: A Computational Geometry Approach
203

x
i
= (x
i,1
, x
i,2
, . . . , x
i,m
) (i.e., the signed error vectors
of the individuals). This is a powerful tool that allows
us to build the optimal solution by combining exist-
ing individuals. However, this is possible only when
the above mentioned system of linear equations has a
solution (i.e., the optimum is in the convex hull).
Interestingly, it is also possible to change the pre-
vious problem, hence achieving more information, by
finding the distance from the optimum to the convex
hull, instead of simply asking whenever the optimum
is inside it. This can be performed by solving the fol-
lowing linear programming problem in the variables
a
1
, . . . , a
n
, e
1
, . . . , e
m
, and ¯e
1
, . . . , ¯e
m
:
minimize e
1
+ ¯e
1
+ e
2
+ ¯e
2
+ . . . + e
m
+ ¯e
m
with constraints:
a
1
x
1,1
+ a
2
x
2,1
+ . . . + a
n
x
n,1
+ e
1
− ¯e
1
= 0
a
1
x
1,2
+ a
2
x
2,2
+ . . . + a
n
x
n,2
+ e
2
− ¯e
2
= 0
.
.
.
a
1
x
1,m
+ a
2
x
2,m
+ . . . + a
n
x
n,m
+ e
m
− ¯e
m
= 0
a
1
+ a
2
+ . . . + a
n
= 1
a
i
≥ 0, ∀i ∈ {1, . . . , n}
e
i
≥ 0, ∀i ∈ {1, . . . , m}
¯e
i
≥ 0, ∀i ∈ {1, . . . , m}
First of all, notice that the previous system has al-
ways a solution and that only one between e
i
and ¯e
i
can be non-zero when
∑
m
i=1
(e
i
+ ¯e
i
) is minimized. The
term e
i
+ ¯e
i
is always positive and represents the dis-
tance (along the i-th coordinate) from the convex hull
to the global optimum. Recall that since all points are
in an m-dimensional space,
∑
m
i=1
(e
i
+ ¯e
i
) represents
a distance - the commonly called taxicab distance -
from the convex hull to the global optimum. We have
decided not to use the more common euclidean dis-
tance since it would have required a non-linear target,
making the problem non-linear. When the distance
is zero the global optimum is inside the convex hull
and, as before, the values of a
1
, . . . , a
n
give us a way
to combine existing solutions to build an optimal so-
lution. To illustrate these facts, we can observe in
Figure 1 the convex hull generated by a population
of 10 individuals (represented as points) and what is
the distance from the optimum (the vector of all zeros,
representing no error on the training set) to the convex
hull. The point inside the convex hull and closest to
the optimum is (c), which is a linear combination of
two other individuals, (a) and (b).
Since linear programming problems can be effi-
ciently solved by the internal points method (Bonnans
et al., 2006) or by the simplex method (even if, con-
trarily to the former one, the latter can have an expo-
nential runtime), it is feasible to compute the distance
from the optimum to the convex hull generated by the
current population at each generation.
4 EXPERIMENTAL SETTINGS
As test problems we used four symbolic regression
problems from the UCI repository (Lichman, 2013).
The problems were chosen to have a low number of
features to reduce the number of variables when com-
puting the distance from the convex hull:
• Airfoil Self-Noise (Airfoil), with 1502 instances
and 5 features;
• Concrete Compressive Strength (Concrete), with
1029 instances each with 8 features;
• Concrete Slump Test (Slump), with 102 instances
and 9 features;
• Yacht Hydrodynamics (Yacht), with 307 instances
each with 6 features.
Each dataset was split into 100 pairs of training and
test sets, the former containing 70% of the instances
(chosen at random with uniform distribution), and the
latter the remaining 30% of the instances. For all the
considered test problems, a total of 100 runs have
been performed with each technique. In each run, a
different partition between training and test data has
been considered. All the runs used populations of 100
individuals allowed to evolve for 1000 generations.
Trees initialization was performed using the Ramped
Half-and-Half method (Koza, 1992) with a maximum
initial depth equal to 6. The function set contained
the four binary arithmetic operators, including pro-
tected division as in (Koza, 1992). The terminal set
contained a number of variables equal to the number
of features in the dataset, plus 100 random constants.
These constants were generated randomly with uni-
form distribution in the range [−100, 100] at the be-
ginning of each run. Survival from one generation
to the other was always guaranteed to the best indi-
vidual of the population (elitism). A random muta-
tion step (generated with uniform distribution in the
range [0, 1]) has been considered in each mutation
event. GSXO and GSM probabilities were equal to
0.9 and 0.5 respectively. These rates have been se-
lected based on the guidelines reported in (Castelli
et al., 2015c).
Since mutation is the only operator that can pro-
duce solution outside the convex hull generated by the
current population, we have also explored the effect
of a crossover-only evolution by performing the same
tests with a mutation rate of zero (i.e., no mutation).
Notice that, in this way, the improvement possible by
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
204

Convex hull
Optimum
Individuals
Distance from the optimum:
m
X
i=1
(e
i
+ ¯e
i
)
(c)
(a) (b)
Figure 1: An example of how the convex hull is related to the optimal solution. Point (c), which is the closest point in the
convex hull to the target, is a linear combination between (a) and (b), that are points that belong to the border of the convex
hull.
GSGP are limited by the best possible solution that
can be found inside the convex hull, therefore we ex-
pect that the fitness will rapidly reach a plateaux from
which improvements are no further possible.
At each generation of each test we computed
the distance of the optimum from the convex
hull using the lp solve linear programming solver
(http://sourceforge.net/projects/lpsolve/). In total,
over 8 × 10
5
linear programming problems have been
solved.
5 EXPERIMENTAL RESULTS
In the first part of our experimental study, we ana-
lyzed the fitness of the best individual in the popula-
tion at each generation, both on training and test sets.
The two systems that have been compared are the
“usual” GSGP, that employs both GSXO and GSM
and a GSGP systems that uses only GSXO. Results of
this analysis are reported in Figure 2. As it is possi-
ble to see, for all the studied test problems a similar
pattern appears: when GSXO is the only genetic op-
erator used, the best training and test fitness do not
improve during the evolution. In other words, no evo-
lution is taking place and the best individual obtained
at the end of the search process has a fitness that is
comparable to the one that was found in the very first
part of the evolution. The behaviour of training and
test fitness is different when the search process uses
both GSXO and GSM. In fact, for all the test prob-
lems, both training and test fitness keep improving
steadily until the end of the run.
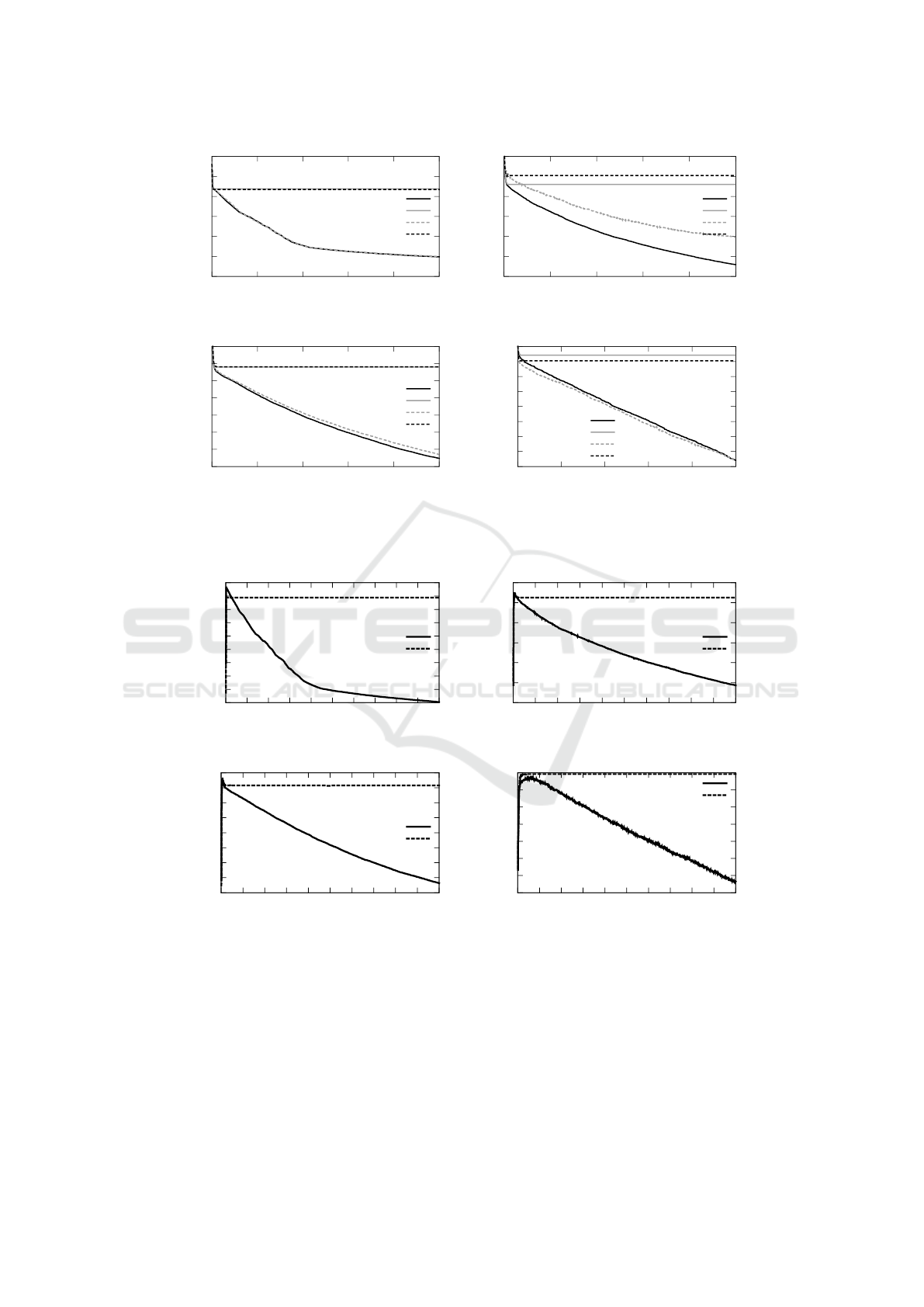
For a better understanding of the behaviour just
observed, in the second part of the experimental anal-
ysis we have taken into account, at each generation,
the distance between the global optimum and the con-
vex hull defined by the current population. Results of
this analysis (obtained using a GSGP system that uses
both GSXO and GSM and a GSGP system that uses
GSXO only) are reported in Figure 3.
If we consider GSGP that uses only GSXO, in all
the test problems the distance from the convex hull
to the target remains practically constant during the
whole evolution. Hence, by only using GSXO, GSGP
is not able to “push” the search process close to a
globally optimal solution. The solutions always re-
main inside the convex hull defined by the initial pop-
ulation. Looking at Figure 3, it is also possible to see
a “jump” in the very first generations (usually the first
two or three generations). In fact, the initial popula-
tion usually contains several highly semantically dif-
ferent solutions. After the selection takes place in the
very first generations, several of these solutions (the
ones with poor fitness) do not survive and the convex
hull, intuitively, covers a smaller area (i.e., hypervol-
ume) of the semantic space. As we can observe, in
all the single runs we performed, the global optimum
is never enclosed in the convex hull, which clearly
makes GSXO practically useless. In fact, all the indi-
viduals created by GSXO will lie in the convex hull
obtained after the first generation of the search pro-
cess. The situation is different when a combination of
GSXO and GSM is used. In this case, in all the stud-
ied test problems, the distance from the convex hull to
the global optimum steadily decreases for the whole
evolution.
To conclude the experimental analysis, we study
the relation between fitness (Figure 2) and distance
(Figure 3). Figure 4 reports the scatter plots of the
training fitness with respect to the distance. Look-
ing at these plots, it is clear that, as expected, the two
quantities are strongly correlated. It is worth pointing
out that fitness is not exactly equal to the distance of
the convex hull to the target: in principle, the convex
hull changes at each iteration in position and size.
An Analysis of Geometric Semantic Crossover: A Computational Geometry Approach
205
0
5
10
15
20
25
30
0 200 400 600 800 1000
Fitness (RMSE)
Generations
train
train (no mut)
test
test (no mut)
2
3
4
5
6
7
8
0 200 400 600 800 1000
Fitness (RMSE)
Generations
train
train (no mut)
test
test (no mut)
(a) (b)
9
10
11
12
13
14
15
16
0 200 400 600 800 1000
Fitness (RMSE)
Generations
train
train (no mut)
test
test (no mut)
11
11.5
12
12.5
13
13.5
14
14.5
15
0 200 400 600 800 1000
Fitness (RMSE)
Generations
train
train (no mut)
test
test (no mut)
(c) (d)
Figure 2: Training and test fitness for the considered test problems. Median calculated over 100 runs. (a) Airfoil dataset,
(b) Slump, (c) Concrete, (d) Yacht.
4000
6000
8000
10000
12000
14000
16000
18000
20000
22000
0 100 200 300 400 500 600 700 800 900 1000
Distance
Generations
median
median-nomut
100
150
200
250
300
350
400
0 100 200 300 400 500 600 700 800 900 1000
Distance
Generations
median
median-nomut
(a) (b)
5000
5500
6000
6500
7000
7500
8000
8500
9000
0 100 200 300 400 500 600 700 800 900 1000
Distance
Generations
median
median-nomut
1600
1700
1800
1900
2000
2100
2200
2300
0 100 200 300 400 500 600 700 800 900 1000
Distance
Generations
median
median-nomut
(c) (d)
Figure 3: Distance between the convex hull and the global optimum. Median calculated over 100 runs. (a) Airfoil dataset,
(b) Slump, (c) Concrete, (d) Yacht.
6 CONCLUSIONS AND FUTURE
WORK
This paper contains a study aimed at motivating the
poor performance of geometric semantic crossover in
geometric semantic genetic programming. We could
informally explain our intuition as follows: since it
creates offspring that stand on the segment joining
the parents in the semantic space, geometric semantic
crossover is only able to create individuals that stand
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
206

2000
3000
4000
5000
6000
7000
8000
9000
10000
11000
12000
13000
2 4 6 8 10 12 14 16
Distance
Fitness (RMSE)
100
120
140
160
180
200
220
240
1.5 2 2.5 3 3.5 4 4.5
Distance
Fitness (RMSE)
(a) (b)
4500
5000
5500
6000
6500
7000
8 8.5 9 9.5 10 10.5 11 11.5 12
Distance
Fitness (RMSE)
1200
1300
1400
1500
1600
1700
1800
1900
2000
2100
8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 13
Distance
Fitness (RMSE)
(c) (d)
Figure 4: Scatter plot showing the correlation between training fitness and the distance from the convex hull to the global
optimum. (a) Airfoil dataset, (b) Slump, (c) Concrete, (d) Yacht.
inside the area defined by the individuals already ex-
isting in the population. If the target is very far from
that area, geometric semantic crossover is not be able
to find it. To corroborate our hypothesis, we intro-
duced a method to check whether a given point is con-
tained in the convex hull or not, and a method to cal-
culate the distance of a point to the convex hull. Using
these notions, we have been able to experimentally
demonstrate the appropriateness of our interpretation
about the poor performance of geometric semantic
crossover. In the first part of our experimental study,
we have considered four real-life symbolic regression
applications and we have shown that a system of ge-
ometric semantic genetic programming that uses only
geometric semantic crossover was not able to evolve
at all on those problems. In other words, the best fit-
ness at the end of a run is comparable to the one that
was found in the very first generations, both on the
training and on the test set. At the same time, a system
of geometric semantic genetic programming that uses
both geometric semantic crossover and geometric se-
mantic mutation is able to evolve, steadily improving
fitness until the end of the run, both on the training
and test sets. This confirms a behaviour that had al-
ready been observed several times in the literature:
geometric semantic crossover gives a practically null
contribution to the evolution, while the most useful
genetic operator of geometric semantic genetic pro-
gramming is geometric semantic mutation. As a sec-
ond step of our experimental analysis, we have stud-
ied the evolution of the distance from the convex hull
defined by the current population to the target, both
when geometric semantic crossover is the only used
genetic operator and when it is used with geomet-
ric semantic mutation. The presented results clearly
show that when geometric semantic crossover is used
in isolation, the distance from the convex hull to the
target remains practically constant during the whole
evolution, instead of the case when both operators are
used, in which it steadily decreases for the whole du-
ration of the run. This motivates the poor usefulness
of crossover, corroborating our intuition: if (as in the
studied test cases) the convex hull is rather far from
the target, crossover is virtually useless, since it will
never be able to generate a global optimum.
These findings pave the way for future work. In
particular, we identify the possibility of searching for
a set of individuals in the population, to which geo-
metric semantic mutation could be applied, in such a
way that the new convex hull, obtained after this mu-
tation, contains the target. This is a very important
objective, but still would use geometric semantic mu-
tation as a crucial operator, thus confirming the idea
that geometric semantic crossover, in isolation, is not
effective.
An Analysis of Geometric Semantic Crossover: A Computational Geometry Approach
207

ACKNOWLEDGEMENT
This research was partially supported by CONACYT
Basic Science Research Project No. 178323, DGEST
(M
´
exico) Research Projects No. 5149.13-P and TIJ-
ING-2012-110, TecNM (M
´
exico) Research Projects
5414.14-P and 5621.15-P, as well as by FP7- Marie
Curie-IRSES 2013 European Commission program
with project ACoBSEC with contract No. 612689 and
also by BioISI R&D unit, UID/MULTI/04046/2013
funded by FCT/MCTES/PIDDAC, Portugal.
REFERENCES
Bonnans, J. F., Gilbert, J. C., Lemar
´
echal, C., and Sagas-
tiz
´
abal, C. A. (2006). Numerical Optimization: Theo-
retical and Practical Aspects (Universitext). Springer-
Verlag New York, Inc., Secaucus, NJ, USA.
Boyd, S. and Vandenberghe, L. (2004). Convex Optimiza-
tion. Cambridge University Press, New York, NY,
USA.
Castelli, M., Castaldi, D., Giordani, I., Silva, S., Vanneschi,
L., Archetti, F., and Maccagnola, D. (2013a). An ef-
ficient implementation of geometric semantic genetic
programming for anticoagulation level prediction in
pharmacogenetics. In Progress in Artificial Intelli-
gence, pages 78–89. Springer Berlin Heidelberg.
Castelli, M., Silva, S., and Vanneschi, L. (2015a). A
c++ framework for geometric semantic genetic pro-
gramming. Genetic Programming and Evolvable Ma-
chines, 16(1):73–81.
Castelli, M., Vanneschi, L., and Felice, M. D. (2015b).
Forecasting short-term electricity consumption using
a semantics-based genetic programming framework:
The south italy case. Energy Economics, 47:37 – 41.
Castelli, M., Vanneschi, L., and Popovi
ˇ
c, A. (2015c). Pa-
rameter evaluation of geometric semantic genetic pro-
gramming in pharmacokinetics. International journal
of bio-inspired computation, pages 1 – 10. To appear.
Castelli, M., Vanneschi, L., and Silva, S. (2014). Prediction
of the unified parkinson’s disease rating scale assess-
ment using a genetic programming system with ge-
ometric semantic genetic operators. Expert Systems
with Applications, 41(10):4608 – 4616.
de Berg, M., Cheong, O., van Kreveld, M., and Overmars,
M. (2008). Computational geometry. In Computa-
tional Geometry, pages 1–17. Springer Berlin Heidel-
berg.
Koza, J. R. (1992). Genetic Programming: On the Pro-
gramming of Computers by Means of Natural Selec-
tion. MIT Press, Cambridge, MA, USA.
Krawiec, K. and Lichocki, P. (2009). Approximating geo-
metric crossover in semantic space. In GECCO ’09:
Proceedings of the 11th Annual conference on Genetic
and evolutionary computation, pages 987–994, Mon-
treal. ACM.
Lichman, M. (2013). UCI machine learning repository.
Moraglio, A. (2011). Abstract convex evolutionary search.
In Proceedings of the 11th Workshop Proceedings on
Foundations of Genetic Algorithms, FOGA ’11, pages
151–162, New York, NY, USA. ACM.
Moraglio, A., Krawiec, K., and Johnson, C. (2012). Ge-
ometric semantic genetic programming. In Parallel
Problem Solving from Nature - PPSN XII, volume
7491 of Lecture Notes in Computer Science, pages
21–31. Springer Berlin Heidelberg.
Moraglio, A. and Mambrini, A. (2013). Runtime analysis of
mutation-based geometric semantic genetic program-
ming for basis functions regression. In Proceedings of
the annual international conference on Genetic and
Evolutionary Computation, GECCO ’13, pages 989–
996, New York, NY, USA. ACM.
Vanneschi, L., Castelli, M., Manzoni, L., and Silva, S.
(2013). A new implementation of geometric seman-
tic GP and its application to problems in pharmacoki-
netics. In Proceedings of the 16th European Con-
ference on Genetic Programming, EuroGP 2013, vol-
ume 7831 of LNCS, pages 205–216, Vienna, Austria.
Springer Verlag.
Vanneschi, L., Castelli, M., and Silva, S. (2014a). A survey
of semantic methods in genetic programming. Genetic
Programming and Evolvable Machines, 15(2):195–
214.
ECTA 2016 - 8th International Conference on Evolutionary Computation Theory and Applications
208
