
Constraint Multi-objective Optimization based on Genetic Shuffled
Frog Leaping Algorithm
Sun Lu-peng and Ma Ge
College of Information Science & Technology, Zhengzhou Normal University, ZhengZhou, Henan, 450044, China
slp2060@163.com
Keywords: Shuffled Frog Leaping Algorithm, Multi-objective, Constraints.
Abstract: To solve the convergence problem of the constrained multi-objective optimization, combining the
advantages of genetic algorithm and shuffled frog leaping algorithm a method based on genetic shuffled
frog leaping algorithm. To use the genetic operators and the packet improved shuffled frog leaping
algorithm and avoid falling into local optimal, accelerating the convergence speed. Experiments show that
the improved algorithm is efficient and reasonable, can reduce the execution time of the multi-objective
optimization problem, improve the quality of optimal solution.
1 THE CONSTRAINT
MULTI-OBJECTIVE
OPTIMIZATION
In the real world, the problem of optimization with
multi-objective constraint, under certain conditions,
the optimization problems are multi-objective, in
most cases, multi-objective to be optimized
attributes with conflicting. For example, the
investment problem, we hope to use the least
investment cost and the lowest risk, to gain the
maximum benefit. If there is no priori knowledge,
this kind of problem solving is very difficult by the
single objective optimization. The multi-objective
optimization problem ( MOP)
[1]
, which is defined as
follows:
If there are n variables and k objective function
of multi-objective problem, describe its
formalization:
{
1 2
1 2
m a x { ( ) , ( ) ,.. . , ( ) }
. . ( ) { ( ) , ( ) ,. .. , ( ) ) 0
k
m
y f x f x f x
S T e x e x e x e x
=
= ≤
1
Among them, x= (x1, x2,... , xn) X, X is the
decision vector, X represent the decision space
formed by the decision vector y= (y1, y2,... , yK)
Y, y is the target vector, Y formed by the target
vector target space constraints, e (X) ≤ 0 determines
the range of x.
Constrained multi-objective optimization goal
can not find a single solution, the optimal solution is
a set, is to ensure that the set of Pareto optimal
solutions close to the true Pareto optimal solution set
and evenly distributed on the basis of satisfying the
constraints, the complexity of the greater. At present,
the traditional method of constrained multi objective
optimization are
[2]
: objective weighting method,
the multi-objective optimization problem into a
single objective optimization problem; the single
objective function as the optimization objective, the
other goal function to solve the constraints; the
goal programming method to set the objective
function for the intended target, find out the closest
or expected value solution. Traditional
multi-objective optimization methods is difficult,
mainly reflected in: one can only obtain a Pareto
optimal solution; the Pareto frontier is concave,
94
94
Lu-peng S. and Ge M.
Constraint Multi-objective Optimization based on Genetic Shuffled Frog Leaping Algorithm.
DOI: 10.5220/0006019700940099
In Proceedings of the Information Science and Management Engineering III (ISME 2015), pages 94-99
ISBN: 978-989-758-163-2
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

can not find the Pareto optimal solution; the
traditional method requires the priori knowledge.
Evolutionary algorithm is a group search
algorithm, can have multiple Pareto optimal
solutions in a single execution, and the different
problems (non continuous, non differentiable
problem solving)
[3]
. In the optimization of
constrained multi objective treatment, improves the
convergence and diversity algorithm. More and more
studies the evolutionary algorithm, and achieved
great success, but the number of multi-objective
evolutionary algorithms are generally not more than
4 , its stability is relatively poor, to find the optimal
solution efficiently and further research is needed.
2 SHUFFLED FROG LEAPING
ALGORITHM
Shuffled frog leaping algorithm is a heuristic search
algorithm.in 2003, Eusuff and Lansay formally
proposed shuffled frog leaping algorithm
[4][5]
, search
by heuristic function, and find the optimal solution.
In this algorithm, the memetic algorithm as the
foundation, combined with the optimization
algorithm and particle swarm optimization.
2.1 The Principle of the Algorithm
In 1989, Moscato proposed Memetic algorithms
(MA, meme) as chromosomes carry genetic
information, only to be transmitted or repeated when
it can be called memo, the algorithm uses the
competition and cooperation mechanism in the local
strategy, which can be used to solve large-scale
discrete optimization problem, can solve the other
algorithm cannot solve the problem.
In 1995, Eberhart and Kennedy proposed particle
swarm optimization algorithm according to the birds
of prey behavior simulation of simplified social
model
[6]
. The algorithm is composed of a plurality of
particle groups to a certain speed in D dimensional
search space flight, each particle to search other
particles within the relevant range phase of merit,
and on the basis of the position change
[7]
. The
particle velocity and position formula as follows:
1 1
1 2
( ) ( )
k k k k k k
iD iD iD iD gD gD
V V c p x c p x
ξ η
+ +
= + − + −
2
1 1
k k k
i D i D i D
x x V
+ +
= +
3
The C1, C2 as the study factor, the particles have the
ability to self summary and excellent learning within
the field of particles, the particles into the history of
the advantages of continuous approximation; ,
[0,1], is a uniform distribution random number
intervals, xi x
i1
,x
i2
,…,x
iD
) is the i particle position
(P
i1
, P
i2
, p
i3
,... P
iD
), best historical point particles
experienced pg=(pg
1
,pg
2
,…,pg
D
) the best point
particle through.
In 1998, Shi and Eberhart into the inertia weight
in the algorithm, improves the convergence
performance of the algorithm, the velocity formula
(2) to:
1
1 2
( ) ( )
k k k k k k
i D i D i D i D g D g D
V v c p x c p x
ω ξ η
+
= + − + −
4
Among them, Omega is the inertia weight, its value
can make the particles with balancing exploration
ability and exploitation ability. When = 1, the
basic particle swarm optimization algorithm is a
standard.
A group of cooperative search algorithm shuffled
frog leaping algorithm by simulating the frog
foraging and produce
[8]
, transfer by individual and
group information, the global information exchange
and local search effectively combined. The whole
wetland frog is set to a population, the population is
divided into several sub populations in small
populations, each has its own culture, every frog also
have other effects and individual self culture, and
Constraint Multi-objective Optimization based on Genetic Shuffled Frog Leaping Algorithm
95
Constraint Multi-objective Optimization based on Genetic Shuffled Frog Leaping Algorithm
95

with the evolution of the population evolution, when
these sub populations evolve to a certain extent, will
these sub populations were mixed, realize
information exchange, until a termination condition
is satisfied. The global leap exchange and the local
depth search strategy so that the algorithm can jump
out of local optimum to the global optimum
direction, evolution.
2.2 The Algorithm Flow
Step 1: population initialization: within the feasible
solution space, randomly generated initial population
of F, the whole population containing k m*N frog.
Where m is the number of sub populations, namely
the number of memeplex, n is the number of each
sub population contains frog. Dimension D, each
frog position represents a candidate solution, the I
frog position F (i) adaptive value is denoted by fi.
Step 2: the entire population in the k frog
according to the fitness values in descending order,
generating a group number X {F(i),f
i
;i=1,2,…,k},
when i=1, said the frog's best position.
Step 3: on the whole population according to
k=m*n divided into m groups Y
1
,Y
2
,…,Y
m
,
expressed
as:
[ ( ), | ( ) ( ( 1)), ( ( 1)), 1,2,..., ]
k j j
Y F j f F j F k m j f f k m j j n
= = + − = + − =
T
he first frogs into Y
1
subgroup, second frogs into Y
2
,
so tired, the m frog into the Ym, the m+1 frog is
divided into Y
1
, until all the frogs distribution date.
Step 4: in each sub population memeplex, every
frog affected other frogs, keep close to the goal.
Mainly uses the memetic evolution, the process is as
follows:
(1) counting im initialization of Memeplex ,im=
0, iterations iN=0 ,each evolution, the frog
information exchange between individuals, the worst
frog position to improve position;
2 im=im+1
3 iN=iN+1
(4) for moving the position of each frog, frog
mobile distance cannot exceed the maximum
distance moved;
(5) if the frog to move to a better location,
representation yields better solutions, with the new
location of the frog instead of frog, or use the best
point in the history of frog pg replace the position of
sub populations best frog pb, repeat the above
action;
(6) if the operation does not produce new, then
randomly generated a new location instead of the sub
populations at the worst frog pw;
(7) if iN<N, then go to the (2);
(8) if im<m, then go to the (1).
Step 5: the frog after memetic evolution, the sub
populations were mixed, to adapt to the values are
sorted, and update the best position of the whole
population of frogs.
Step 6: a termination condition is satisfied, then
the end, or to jump to the Step 3.
2.3 The Algorithm Parameter Setting
The algorithm needs to set 5 parameters: the number
of initial clusters in the frog k, k value is greater,
showing the number of initial samples of the larger,
compute the optimal solution is more likely; number
of sub populations of m because k=m*n, m size of
the direct impact of the a number of frogs each
subgroup of n, if the n value is too small, the
advantages of memetic evolutionary search will not
exist; allows the frog to move the maximum distance
, the values and the ability to control algorithm for
global search, the value is too large, may skip the
optimal solution, capacity is too small will reduce
global search; maximum algebra of the entire
population, and scale proportional to the size of the
value of the maximum number of iterations; sub
populations of N, might fall into the local optimal
ISME 2015 - Information Science and Management Engineering III
96
ISME 2015 - International Conference on Information System and Management Engineering
96
value is too large, too small will weaken the
information exchange between individuals.
3 IMPROVED SHUFFLED FROG
LEAPING ALGORITHM
Shuffled frog leaping algorithm is relatively strong
ability in global search, but if the problem is more
complex, then the problems of slow convergence
speed and easily falling into local extremum
problem, genetic algorithm has the ability to jump
out of the local optimum, therefore, will be shuffled
frog leaping algorithm combined with genetic
algorithm to form the genetic shuffled frog leaping
algorithm (G-SFLA).
Differences between G-SFLA and SFLA is to
adopt the genetic algorithm crossover and mutation
operations on packet evolution, these two operations
used in the process of Step 4.
The crossover operation refers to the same position
of random performance best frog Pb and the poor
performance of frog Pw set breakpoints, the right
part of the breakpoints are exchanged, generating
two new process called cross. If the new position is
better than Pw, instead of Pw. If the solution is not
superior to Pw, the random Pw bits of mutation
operation, thus creating new solutions instead of Pw.
G-SFLA, the group also makes some
improvements, the grouping method of SFLA, the
last group of individual relative fitness of relatively
poor individuals in the whole population, even if the
group members constantly through the information
exchange and learning, it is unable to get a better
evolution results. Because of uneven packet,
limitation of the study amplification. A new way of
grouping is based on the original packets, randomly
from the other group took several individuals joined
the group, the number of the members of the group
are n+m-1, diversity is obtained with genetic
arithmetic, play the advantage of. Note that, when
the team re merged into a population, the number of
individuals in a population increase of m* (m-1),
sorted again for all individuals, remove duplicate
individual. The number of individuals removed more
than k, from the previous K individuals to iterate the
next round, if less than k individuals, randomly
generated individuals, make up the K for the next
round of iteration.
4 SIMULATION EXPERIMENTS
This experiment in order to verify the performance
of G-SFLA, comparing with the shuffled frog
leaping algorithm, the experimental results are
analyzed. The experimental function using 3
benchmark functions, as shown in table 1: The
experimental parameters are set as follows: the
population of 500 frog, is divided into 25 sub
groups, frogs have 20 each subgroup of SFLA,
G-SFLA in 25 (adding 5), in the subgroup of 20
times of iteration, the individual search range is
Xmax/5, evolutionary iteration times is 1000, the
algorithm running 25 time. In the condition of same
parameters, the experimental results on SFLA and
G-SFLA two kinds of algorithm (Table 2) were
compared, analysis of the pros and cons.
Table 1: The Test Object.
Function Function Expression
Range
Standard
Solution
Sphere
2
1
D
i
i
x
=
∑
[-100,100]
0
Schwefel
1
( sin | |) 418.982 9
n
i
i
x xi n
=
− +
∑
[-500,500]
0
Ackley
2
1 1
1 1
20exp[ 0.2 ] exp[ 2 ] 20
n n
i i
i i
x x e
n n
π
= =
− − − + +
∑ ∑
[-32,32] 0
Constraint Multi-objective Optimization based on Genetic Shuffled Frog Leaping Algorithm
97
Constraint Multi-objective Optimization based on Genetic Shuffled Frog Leaping Algorithm
97
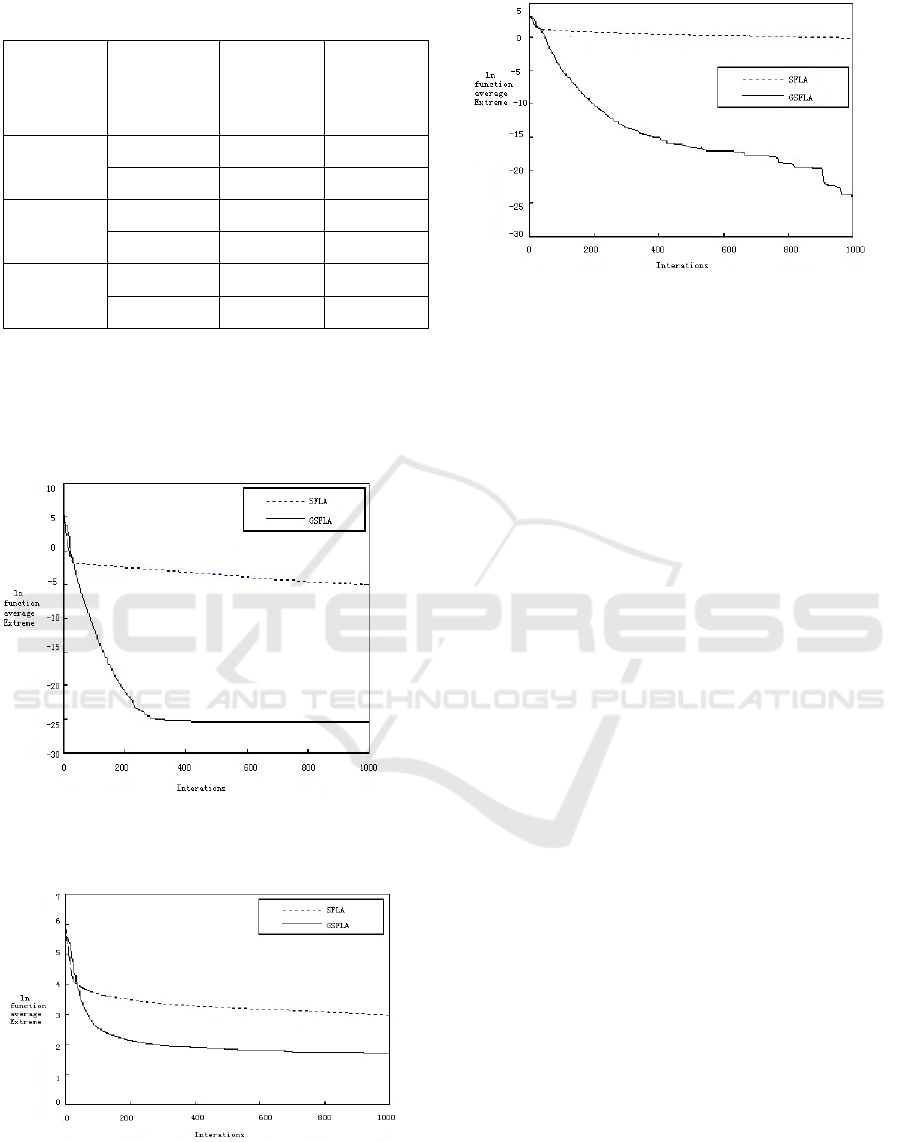
Table 2: The experimental results.
Function Algorithm
The average
optimal
value
standard
deviation
Sphere
SFLA 0.00573 0.00286
G-SFLA 2.3E-16 4.72E-16
Schwefel
SFLA 0.92186 0.18636
G-SFLA 0.00304 0.00017
Ackley
SFLA 0.79385 0.65802
G-SFLA 1.82E-13 5.42E-13
Figure 1- Figure 3 are three curves that function
respectively by SFLA and G-SFLA algorithm
independent running average value obtained after 25
times of evolution.
Figure 1: The evolutionary curve of Sphere.
Figure 2: The evolutionary curve of Schwefel.
Figure 3: The evolutionary curve of Ackley.
Through the above three in the chart, the
constrained multi objective optimization, the
performance of G-SFLA is better than SFLA, in the
target optimization accuracy under the same number
of iterations, G-SFLA is obviously lower than
SFLA. The above results show that, G-SFLA has
better stability and convergence.
5 CONCLUSION
Based on the advantages of shuffled frog leaping
algorithm and genetic algorithm, design a constraint
multi-objective genetic algorithm based on shuffled
frog leaping algorithm. Experiments show that, in
the parameter is small, the G-SFLA algorithm has
faster convergence speed, can in the iteration times
less access to better solutions.
REFERENCE
E. Zitzler, L. Thiele, ”Multiobjective Evolutionary
Algorithms: A Comparative Case Study and the
Strength Pareto Approach”, IEEE Transactions on
Evolulionary Compution , vol.3,no.4, November
1999,257-271.
H-P. Sehwefel, ”Kybernetische Evolution als Strategie der
experimentellen Forschung in derStromungstechnik,”
Diploma thesis, Technical University of Berlin,1965.
ISME 2015 - Information Science and Management Engineering III
98
ISME 2015 - International Conference on Information System and Management Engineering
98

K. Deb, Multi-Objective Optimizarion using Evolutional
Algorithms. Chicester,UK:John Wiley&Sons,2001
Eusuff M & K E Lansey. Optimization of water
distribution network design using the shuffled frog
leaping algorithm[J]. Water Resources Planning and
Management,2003,129(3):210-225.
Rahirni-Vahed, A., Mirzaei, A. H.. A hybrid
multi-objective shuffled frog- leaping algorithm for a
mixed-model assembly line sequencing Problem[J].
Computer & Industrial Engineering (2007),
doi:10.1016/j.eie.z007.06.007
Ziyang Zhen & Daobo Wang & Yuanyuan Liu. Improved
Shuffled Frog Leaping Algorithm for Continuous
optimization Problem[C].IEEE Congress on
Evolutionary ComPutation ,2009:2992-2995
Emadl Elbeltagi & Tarek Hegazy & Donald Grierson.
Comparison among five evolutionary-based
optimization algorithm[J].Advanced Engineering
Informaties,2005,19(l):43- 53
E. Zitzler, M. Laumanns, L.Thiele,”SPEA2:Improving the
strength pareto evolutionary algorithm,” in
Evolutionary Methods for Design, Optimization and
Control with Applications to Industrial Problems,
Athens, Greece, 2002,95-100.
Author Introduction:
1. Sunlupeng (1970.3-), male, Henan Zhengzhou,
Master Degree, lecturer, research direction of
computer application.Email:slp2060@163.com
2. Mage (1983.1-), male, Henan Zhengzhou, Master
Degree, lecturer, research direction of computer
application.Email:mage0608@163.com
Constraint Multi-objective Optimization based on Genetic Shuffled Frog Leaping Algorithm
99
Constraint Multi-objective Optimization based on Genetic Shuffled Frog Leaping Algorithm
99
